基于复杂环境下的车道线识别
2022-07-14范跃文
范跃文
(北京市政路桥锐诚科技有限公司,北京 100068)
0 引言
目前,国内外的许多学者已经提出了相当多的基于视觉的车道线检测算法,而基于视觉的车道线检测算法需要满足实时性、准确性以及适用性等要求,因此通常采用不同的模型和合适的边缘检测技术来检测车道线,其中有直线、曲 线以及分段切换模型等道路模型以及最小二乘法拟合、Hough变换、改进cany 算子以及基于小波变换的边缘提取等边缘检测技术,但是这些单一的算法都会因摄像头、光线等因素造成的影响而产生非常大的误差,对车道线检测的鲁棒性和准确性都有一定程度的影响,并且Hough 变换计算量很大,因此会有一定的延迟,这是在利用Hough 变换来检测车道线算法的一个难题。基于此,该文设计了一种结合图像预处理和改进Hough 变换的算法。在遇到强光照、弱光照以及有树荫等阴影遮挡的情况。该算法能够成功检测到车道线并且实时性很好、准确性很高。首先,该文所设计的算法将根据颜色空间分布情况,设置 ROI 区域,以减少计算量。其次,进行灰度拉伸等操作,尽量去除光照以及阴影等干扰。再次,进行 Hough 变换检测出车道线。最后,进行判别。
1 根据情况的复杂性给图像分类
该算法根据车载摄像头所采集的图像中的信息,在保证光照鲁棒性的基础上对图像进行分类。通常来说,光照强度较强的图像,其灰度值变化是比较快的,并且车道线与其他图像信息之间的对比度也比较大,如图1(a)所示,因此图像中往往会出现全白的路面,这会导致图像中有用的信息(例如车道线)没有办法检测出来。为了解决这一类问题,该算法将会对光照强度较强的图像进行对比度的均值化处理,并通过灰度值均值化处理成功采集到图像中的有用信息。
而光照强度较弱的图像,尤其是在夜晚采集的图像,如图1(b)所示,其灰度值变化是比较慢且平缓的,即一张图像中的灰度值不会发生太剧烈的变化,并且图像中的车道线与其他景物的对比度非常小,车道线与其他景物容易发生混淆,导致车道线不能被成功检测出来。对于这一类图像中,该算法将会采用增大对比度、进行灰度值拉伸等操作来恢复有用信息即车道线在图像中的显示,从而成功检测出车道线。
对于有阴影遮挡的车道线的图像,如图1(c)所示,其同一条车道线的灰度值是不相等的,并且树荫等阴影也会有其边界线,因此在车道线检测过程中,不仅需要检测的车道线会被检测出来,不需要检测的阴影边界线也会被检测出来,或者处于阴影中的车道线因为灰度值和对比度的影响而无法被检测出来。在这一类图像中,该算法将会对图像进行扫描,对有阴影的图像进行二值化处理,然后进行灰度值拉伸操作,去除阴影对图像的影响,最后再进行车道线的检测。
该文是通过计算整体图像的灰度均值来对图像进行分类的。对整体图像的灰度均值的计算如公式(1)所示。

式中:P 为像素均值;N 为像素总数目;p(i)为每个像素的数值。
根据计算可知,图1(a)的像素均值P=155,图1(b)的像素均值P=60,图1(c)的像素均值P=140。图像的像素均值能够很好地反映所采集图像的光照强度,因此可根据图像的像素均值对图像进行分类,即分为白天及夜晚所采集的图像,并在后续中对二者进行不同的处理。
在对图像进行了光照强度的分类之后,再对图像进行有、无阴影遮挡车道线的分类。针对这个问题,该文所采取的方法是先对图像进行颜色空间的识别和处理,继而进行分类。
分析表1得,采用简单的工序模具结构零件,但生产效率低不能满足该工件大量生产的要求。复合模采用单一模具中实现多步冲压工序,所以冲压模具的结构与单工序的模具相对复杂,各个零件的行动准确可靠,互相不干涉。产量、精度高,零件较为平整。级进模也需要模具,产量高,但模具结构复杂,送料不方便,工件尺寸偏大。通过对对上述三种方案的比较,用复合模具相对适合。
2 图像预处理
为了降低图像中的噪声,消除其他景物对车道线检测的影响,并减少Hough 变换的计算量,该文将对图像进行预处理。
2.1 根据颜色分布确定车道线所在位置并设置ROI区域
因为在后续的处理中均会把BGR 颜色空间的图像转换为Gray 颜色空间的图像进行处理,所以需要先解决阴影对车道线检测造成的影响。
在图像处理的过程中,因为车道线总是在图像的下半部分,上半部分的天空及树叶等其他颜色会干扰图像的处理,所以设置图像的下半部分为感兴趣区域(ROI),仅对此区域进行颜色空间上的处理,并划分车道线检测区域。
该文采集的所有图像均为BGR 三通道颜色空间的图像,因此将蓝色分量值的大小作为区分车道线与阴影的根据。
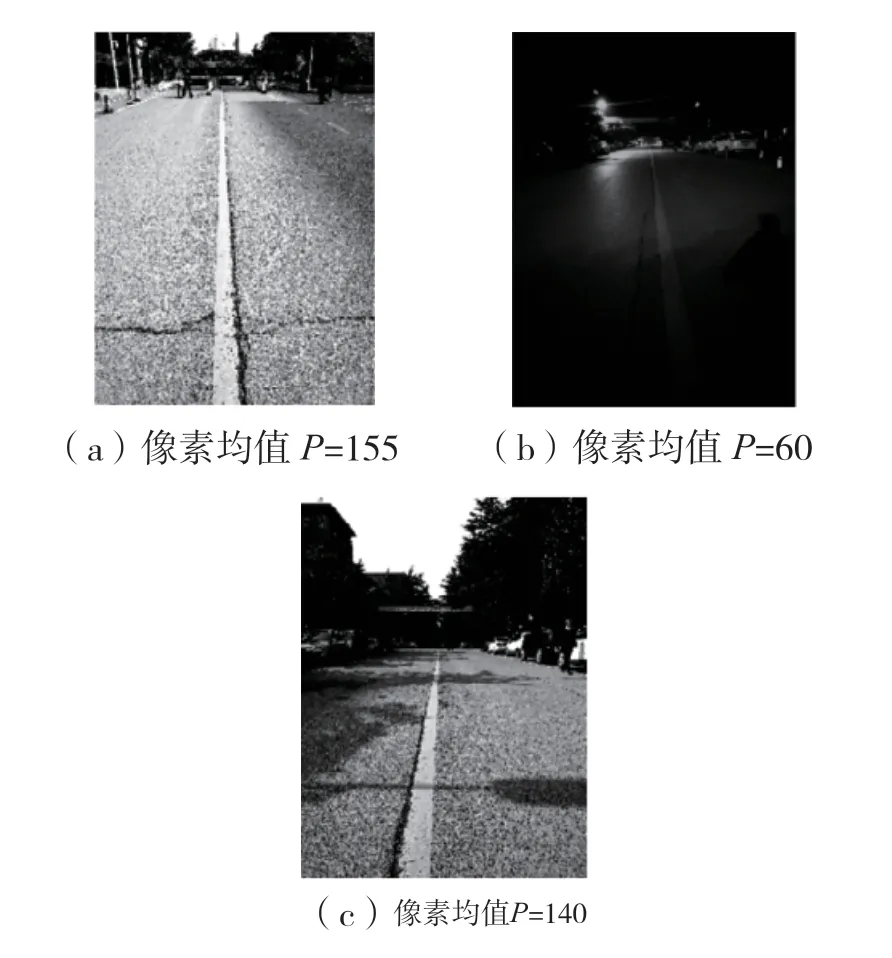
图1 不同情况下所采集到的图像
方法主要是对图像进行扫描,记录图像每一行各个像素的蓝色分量值,通过蓝色分量值的大、小来判断该像素是否位于车道线内。为了降低噪声的影响并减少检测误差,在扫描图像的过程中采取每采集5 个像素点的蓝色分量值即进行均值化处理的方式,对采集到的蓝色分量值进行平滑处理,如公式(2)所示。

式中:B(x)为平滑处理后的蓝色分量值;b(x)为平滑处理前的蓝色分量值;x 为图像中每一个点的横坐标值。
2.2 对光照强度不同的图像进行灰度处理
对于光照强度较大的图像,其所存在的问题是车道线与背景的对比度较大,像素灰度值普遍较高,容易导致图像中出现全白的路面。因此需要对光照强度较大的图像进行灰度均衡化处理。
灰度均衡化实际采用的是直方图均衡化处理,其核心思想是把原始图像的灰度直方图从比较集中的某个区域变成在全部灰度范围内的均匀分布。直方图均衡化通常用来增加图像的局部对比度,因此这种方法能够在图像背景太强的时候,使目标区域即车道线从背景中脱离出来。

对于灰度级从[0,L-1]的图像,则是统计各个灰度级的累计分布概率,灰度值k(0 经过灰度值均衡化操作之后,图像的灰度值范围有一定浮动的空间,更加有利于后面灰度化、阈值化和二值化的处理。强光照图像经过灰度值均衡化操作后的效果如图2 所示。 对于光照强度较小的图像,其所存在的问题是车道线与背景的对比度很小,很难将车道线与背景物体区分开。并且由于夜晚的图像光照不足,灰度值普遍偏低,因此需要将弱光照图像进行灰度拉伸处理。 图2 强光照图像灰度均衡化处理效果 灰度拉伸是通过扩展图像灰度级动态范围来实现的,它可以扩展对应的全部灰度范围,能够对图像的ROI 区域进行增强,而对图像的非ROI 区域进行抑制。实现灰度拉伸通常采用的3 段线性变换函数f(x)如公式(4)~公式(6)所示。 经过灰度拉伸后,图像中的车道线与背景路面的对比度增大,二者变得更容易区分,在后续的阈值化、二值化等一系列操作中效果明显。弱光照的图像经过灰度拉伸处理后的效果如图3 所示。 图3 弱光照图像灰度拉伸化处理效果 2.1 节和2.2 节的操作已经将车道线的特征进行了加强,并过滤了图像噪声,去除了阴影遮挡对车道线检测的影响。但是图像中仍然存在一些依靠灰度处理难以去除的影响,例如太过明亮的灯光、路面反射的强光等,还需要对图像进行边缘的增强。 对于强光照造成的灰度处理无法解决的问题,该文采取阈值化处理的方法。阈值化操作主要是对图像中的像素做出取舍,将高于阈值的像素舍弃掉,将低于阈值的像素留下。在上述问题(太过明亮的灯光、路面反射的强光等)中,阈值化操作能够滤去高曝光度的影响,即将像素值太大以至于不可能出现车道线的区域舍弃掉,加快后续检测速度。处理结果如图4 所示。 第2 节的图像预处理操作的目的是为了尽量减少Hough变换的计算量以及背景物体对Hough 变换造成的影响。接下来该文将对预处理后的图像进行Hough 变换,以检测出车道线并得到最后结果。Hough 变换是图像处理中的一种特征提取技术,是在一个参数空间中通过计算累计结果的局部最大值得到一个符合特定形状的集合,并将其作为Hough 变换的结果。这种方法的特点是对数据的敏感度不足。 图4 阈值化处理效果 Hough 变换的基本思想是点—线的对偶性,即图像空间里共线的点对应参数空间里相交的直线,反过来,参数空间相交于同一点的所有直线在图像空间里都有共线的点与之对应。而为了解决垂直直线斜率无限大的问题,一般在极坐标方程中进行Hough 变换,如公式(7)所示。 式中:ρ 为极径;α 为极角,其范围为0°~180°;x 为像素点相对图像原点的行坐标;y 为像素点相对图像原点的列坐标。 Hough 变换的具体实现步骤如下:1) 建立一个参数空间(ρ,α)的二维的数组,该数组相当于一个累加器。2) 顺序搜索图像中所有目标像素,并根据公式(4)~公式(6)在参数空间中找到每一个目标像素的对应位置,然后在累加器的对应位置加1。3) 求出参数空间(累加器)中的最大值,设其位置为(ρ',α')。4) 通过参数空间位置(ρ',α'),根据公式(4)~公式(6)找到图像空间中相对应的直线参数。 根据对Hough 变换的原理和具体步骤的描述可知,如果直接对原图像进行Hough 变换,将会耗费大量的时间来计算车道线以外的干扰景物,实时性较差。因此该文中的算法才选择对图像进行预处理,加强车道线,去除干扰,减少干扰物对车道线的影响,从而提高Hough 变换的实时性。 首先,对采集到的图像进行扫描,在颜色空间上根据蓝色分量值来判别车道线是否可能存在,进而设定车道线所在区域,并去除阴影遮挡车道线所带来的影响。其次,计算图像的像素均值,根据像素均值判断采集图像的时间是白天还是夜晚,对于白天采集到的图像对比度太大,路面出现全白无法识别车道线的情况,则进行灰度均衡化,以增强车道线;对于夜晚采集到的图像对比度太小,车道线与背景容易混淆的情况,则进行灰度拉伸化处理,以增强车道线与背景的对比度。再次,对经过灰度化处理的图像进行阈值化处理,留下需要的车道线信息,以加快Hough 变换的计算时间。最后,进行Hough 变换得到效果图。 该文所提出的算法是基于VS2012 环境和OpenCV 图像处理库实现的,并且该文对算法进行了大量的试验。采用该文中检测车道线的算法,车道线检测在实时性和准确度方面都有了较大的改善。传统Hough 变换的平均执行时间约为13ms,采用该文中先对图像进行预处理再进行Hough 变换的算法,其执行时间约为8ms。 对采集到的图像中选取的样本车道线检测效果如图5所示。 图5 车道线检测效果图 该文提出了一种基于Hough 变换的在复杂情况(如白天光照很强,夜晚光照很弱,有阴影遮挡车道线等情况)下进行车道线检测的方法。首先,对图像进行颜色空间上的选择,去除阴影造成的影响。其次,通过灰度变化加强车道线,并减弱背景对车道线检测的影响。最后,利用Hough 变换检测车道线。该算法极大减少了传统Hough 变换检测车道线的时间,增加了车道线检测的稳定性。试验证明,该算法在不同情况下均有较好的检测效果。


2.3 对图像进行阈值化处理
3 进行Hough 变换检测车道线

4 试验结果
5 结语
