针对汽车行业内智慧停车的规划理论研究
2022-07-13陈超跃陈益黄玉王涛于济铭
陈超跃 陈益 黄玉 王涛 于济铭
摘 要:智能停车是国内外汽车行业蓬勃发展和快速增长的新型兴旺市场。对于可预见的巨大智能停车市场,未来应用领域的市场前景和广泛的评估业务是毋庸置疑的。相应的检测业务所带来的经济效益和社会效益将是无限的。国务院办公厅最近根据国家发改委、住建部等关于推进停车设施发展的四项建议,提到加快停车设施提质增效,优化停车信息管理,推进智能停车服务,解决我国停车需求缺口大、停车位利用率低的问题。本文为沈阳智慧停车工程建立了一套模型并借助MATLAB利用模型进行仿真。根据讨论智慧停车干扰参数得出减少损失方法,设计了一套巡逻方案并给出了判断车人混合扫描是否占优的方案。对智慧停车的实施具有一定参考价值。
关键词:智能停车;优化分析;MATLAB;数值模拟分析
引言
据相关统计,中国目前停车位缺口率大于50%,而平均空置率已达51.3%,资源浪费严重。因此,提高停车位利用率对于减缓停车冲突的重要性不言而喻。
截止至 2020年底,据统计显示沈阳市居民汽车保有量达到263. 5万辆,其中私家车保有量达到233.4万辆,人均汽车保有量排名位居全国第十。国内汽车保有量的不断上涨给市民的交通带来了巨大的便利,但同时也给道路交通和停车造成了不小的压力。
智慧停车是指综合应用通信定位等技术,对城市内停车位进行搜寻、管控、预约、导航等服务,实现实时停车。整合导航服务,增加车位资源,提高停车场利润,优化车主停车服务。
1.国内外研究现状
智能停车信息化水平可分为三个阶段:初始设计开发阶段、开发成熟阶段和平台发展阶段。中国的汽车工业发展的时间很短。目前,智能停车行业正处于从最初的设计开发到成熟发展的阶段。与西方发达国家相比存在明显差距,相关部门仍需加大发展力度,推進中国智能停车行业的发展速度。
根据《2020-2026年中国智慧停车行业竞争现状及投资商机预测报告》数据显示:内部停车设施的建设速度远远落后于汽车保有量的增长速度,停车位供应量巨大。预计不久后国内停车位的数量将达到11949万,如果汽车所有权继续以近五年的复合增长率增长,那么全国民用汽车保有量将达到2.9141亿辆,车位规模将达到1:0.4。如果我们以发达国家为参照,车位比例应在1:1.3左右,国内车位比例严重偏低。
2.本文研究内容及分析
本文首先针对单停车位。做出假设并建立模型来计算移动视频采集车辆计费可能产生的计费收益与损失。其中利用概率论相关知识建立了一套单车位日收费期望模型。模型中利用泊松分布来描述单车位的停车时长;并分析实际收费曲线和理想收费差别产生的原因,归纳得到实际收益曲线。而对于不同区域的停车位,车辆的停放时间可能会有不同的特点,本文根据对沈阳站-太原街区域收费路段及级别,建立模型来规划移动视频采集车辆的路线,并得出其所需的车辆数及采用人工收费更好的路段情况。并研究这些路段采用了人工收费区域巡逻车的路线规划变化并得出综合计费方案。具体方法是将一个大区域分解为一系列小区域,分别利用区域收益模型计算得到各个小区域的优化条件,最后得到为大区域的优化条件。
3.模型的建立与分析
3.1针对单停车位计费的模型介绍和仿真结果分析
3.1.1 模型介绍
本文研究的区域位于沈阳的中心区域,停车难的问题尤为突出。因此,本文模拟可以认定该区域的车位供小于求,在白天处于饱和运行状态,即该车位一辆车开走,另一辆车随即开入。在统计意义上来说,一辆车的停车时间是个随机过程,所以假定停在该车位的停车时间满足泊松分布。又因为停车出入位时间的误差为1分钟,所以本文采用的最小时间单位为分钟。本文用 表示该车位停车时间为t的汽车出现的概率,其表达式为:
式中, 取正整数;λ为一个常数,根据泊松分布性质可知,λ为该车位的平均停车时间。车位的平均停车时间于停车位的周围环境有关。例如停车位位于饭店附近,在此停车的顾客的目的为吃饭,所以该处平均停车时间λ可设为60-90分钟;如果停车位处于小区附近,在此停车的顾客的目的通常为做客和访友,所以该处平均停车时间 可设为120-180分钟。
本节以沈阳某地停车位为例推导单停车位计费收益和损失的关系式,本文的模型只考虑白天的情况。白天的收费函数为一阶梯函数,停车时长每增加30分钟,停车费用增加3元,但是增加到40元后不再增加。通过计算本文得出当计费时间超过400min时,道路停车收费将稳定在40元不变。
由于停车平均时间λ已知,则单日平均停车量可知,从而得到该车位的理论日计费收益的期望值 :
需要注意的是,上式计算的值是个统计期望值,它是多日平均的结果。但是题中的规则存在漏扫的可能性,这导致上式计算的只是一个理想值。因此实际日收益期望值通常会小于理想值。下文对漏扫情况进行分析并修正模型。
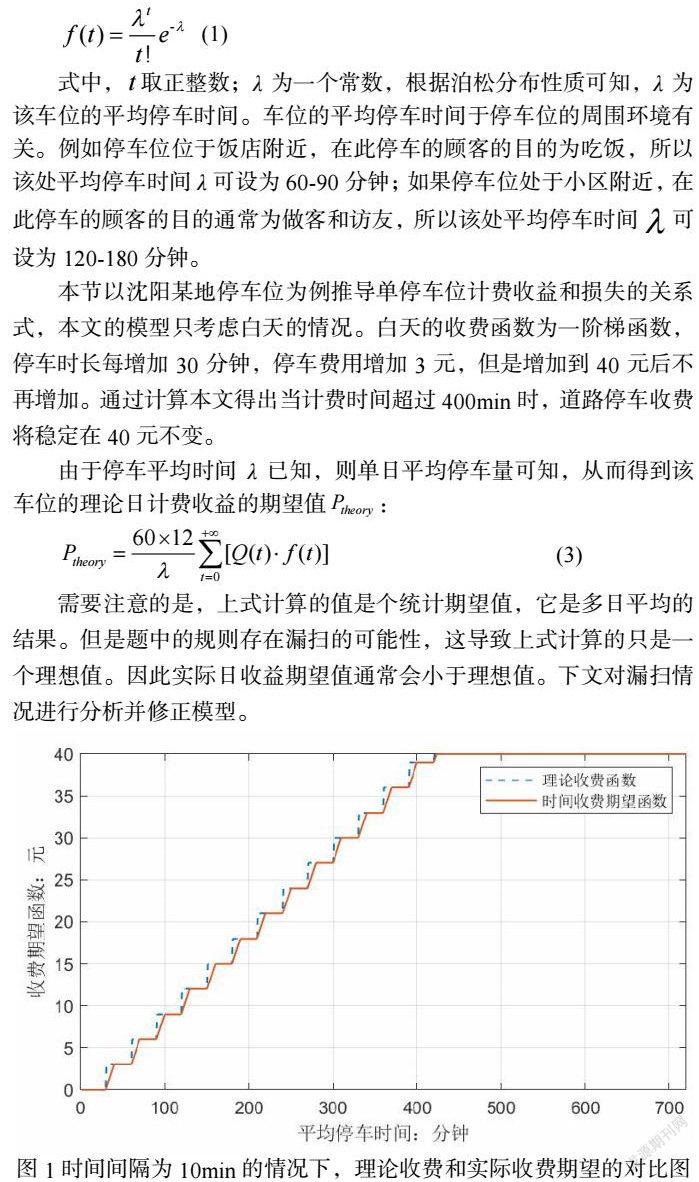
漏扫的根本原因是巡逻车拍照频率不足。一辆巡逻车要扫描多个车位,因此车位两次扫描存在时间间隔,时间间隔采用 来表示。时间间隔是巡逻车周期路程和速度的函数。本文要求时间间隔应该小于30分钟,否则无意义。时间间隔导致实际收费不一定和道路停车一致。举个例子,某车停车时间t为33分时,按照收费要求需交3元停车费。在时间间隔等于10分钟的情况下,根据题目中的扫描收费规则,该车被扫到3次才能被认定停车超过半个小时;被扫到2次会被认定为停车时间小于半小时,不会被收费。在上述情况下,被扫描3次的概率为3/10,被扫描2次的概率为7/10,因此t为33分钟时,实际收费期望为3×3/10。
时间间隔等于10分钟情况下,实际收费期望和道路停车收费的对比如图1所示,表明统计意义上实际收费函数小于等于理论收费函数。
3.1.2 仿真及结果分析
由上述分析可知,实际日计费收益 的两个主要影响因素分别是该车位的平均停车时间λ和巡逻车扫描间隔 。本文使用MATLAB程序对此进行了数值模拟,结果如图2所示。
图2表明实际日计费收益始终小于理论日计费收益,而且巡逻车扫描间隔越小,实际日计费收益和理论日计费收益的差值就越小。图2还表明当车位的平均停车时间λ大于420分钟时,实际日计费收益和理论日计费收益的差值基本可以忽略,且λ增加而趋近于40元。本文将实际日计费收益始终小于理论日计费收益差值定义为该车位的日损失。同样原理,时间间隔越小,可以减少车位的日损失。单车位收费模型可以定量计算该车位的收入,这为后续问题的分析提供理论依据。
3.2对于不同区域的停车位的日收益介绍与盈利值的优化分析
3.2.1区域日收益介绍及分析
若巡逻车靠右走,只能拍到右边的车牌,因此巡逻车路线是一个闭环。该巡逻车负责的车位可以依据车位周围情况划分成k个不同的组,每组具有相同的平均停车时间,这样就可以通过单车位收费模型获得该车负责区域的日收费期望值。
區域日收费期望值减去巡逻车日耗费与巡逻车数量的乘积即为区域实际日收益。本文所使用的移动视频采集车为日产奇骏,本文调查发现其价格大概处于20万人民币左右,其每公里油费大概为0.45元,沈阳市的司机工资年工资为60000元。
本模型仿真的目的是通过遍历各种情况,设置车辆数和合适路线,实现区域日收益最大的过程。
3.2.2区域优化分析
本部分的核心思想是将一个大区域分解为一系列小区域。由于研究区域的同类车位分布区域离得很近,所以本文将该区域分为三个子区域,每个子区域的车位类型都是一样的。本文只需找到子区域的优化条件,求和就可得到整个区域的优化条件。
通过查询资料与数据,本文得到了三种不同区域类型的平均车速的数据为:一类区域平均车速为35.4 km/h,二类区域平均车速为42.2 km/h,三类区域平均车速为32.8 km/h。
本文采用MATLAB用上述模型针对不同情况进行了仿真,仿真发现区域内巡逻车总路线越少,则该区域的日收益期望越大。为此本文在巡查车尽量避免走不必要路程原则下为各个子区域设计了巡逻车最小的路线,并将其命名为方案一。
本文对上述路线进行了仿真,获得了个子区域的日收益期望值和所需的最佳车辆数目。模拟结果表明,在一类区域,巡逻车数量为2时,区域总盈利最大;而在二类区域与三类区域时,区域巡逻车数量为1时区域总盈利最大。针对该方案盈利情况,一类道路区域日收益为25240元,二类道路区域日收益为9743元,三类道路区域日收益为4149元.
为了便于对比,同时本文设计了两种方案,分别命名为方案二、方案三,并用上述方法对其进行了分析。对于方案二的一类道路区域日收益为25160元,二类道路区域日收益为9710元,三类道路区域日收益为4133元。针对方案三的一类道路区域日收益为25160元,二类道路区域日收益为9677元,三类道路区域日收益为4103元。
方案一与方案二、方案三表明方案一为最优规划路线且收益最高。研究区域所需巡逻车辆数为4。
3.3路线规划与计费方案的分析
3.3.1人工扫描占优条件的分析
本文可以将人看做一辆速度为4 km/h的巡逻车,其日耗费只有工资。因为扫描员的工作是步行完成,所以模拟过程中设置的工资比扫描车司机高,为7万元/年。
以上述模型为基础本文使用MATLAB程序模拟了很多情况。在一类道路区域巡逻车车速大于5.5km/h且停车位区域长度大于266km/h时采用巡逻车,在二类道路区域巡逻车车速大于4.95km/h且停车位区域长度大于599km/h时采用巡逻车,在三类道路区域巡逻车车速大于6km/h且停车位区域长度大于1000km/h时采用巡逻车。上述模拟表明相同区域巡逻车速大于5.5 km/h后,巡逻车才能有优势。因此,闹市区和经常阻车的区域,人工扫描更有优势。表明停车区长度小于266m,人工扫描更有优势。因此它在停车区很远的短孤立区,采用人工收费更加合适。上述数据共同表明,停车收费高的时候,人工扫描收费更有优势。
3.3.2人车混扫情况下的优化方案分析
基于本文3.3.2节的分析,本文以一类停车区为例,分析车人混扫是否有优势。具体操作就是在方案一中加入了一个人工扫描区域,相应的巡逻车路线也进行了改变。
本文检查地图发现研究区域经过闹市区。猜想该区域替换为人工收费后,可能会节约一定的成本,从而提高收益。但是本文通过模拟发现,路线修改后该区域人车混合计费方式的最佳总盈利为25138元/日,低于本文5.2.2节的最佳收益25240元/日。本文可知增加一个人工收费所得的收益要小于增加一个人工收费所需的成本。因此本文研究的区域不适合人车混扫模式。
4.结语
综上所述,针对汽车行业内智慧停车规划方案,随着巡逻车扫描时间间隔的减少,实际收费值趋近于理想收费值,进而减少单车位损失。在研究区域的类似路段进行了车人混合扫描进行了尝试,发现在研究区域人车混合扫描不能增加收益。最重要的是我们的模型给出了判断人车混合扫描是否占优的方案。泊松分布适用于多数情况,但是某些停车位周围复杂的情况下存在误差且本文的研究区域不适合人车混扫模式。本模型讨论了不同停车位的收益情况,有较大的应用范围,应用者可以根据具体情况修正。希望能够作为今后汽车行业研究的参考,推动交通规划向智能化迈进。
参考文献
[1]李若冰,郑梦琪,丁泽琴,尹利阳,智慧停车用地现状、问题和对策建议-以沈阳为例[J],营销界,2009,(13),100-101.
[2]司守奎,孙玺菁,数学建模算法与应用,北京:国防工业出版社,2008.
[3]韩中庚,数学建模方法及其应用,北京:高等教育出版社,2005.
[4]盛骤,谢式千,潘承毅,概率论与数理统计[M].高等教育出版社,2008,309-315.
[5]姜启源,谢金星,叶俊,数学模型[M].北京:高等教育出版社,2003.
[6]Optimization of On-Street Parking Charges Based on Price Elasticity of the Expected Perceived Parking Cost[J].Sustainability,2021.PP 5735-5735,Volume 13, Issue 10.
作者简介:陈超跃 本科在读 研究方向:交通工程运输规划与管理