RTK高程测量精度验证
2022-07-12翟兴华许文婧吴学文王露露
翟兴华 许文婧 吴学文 王露露
(1.陕西测绘仪器计量监督检定中心 陕西西安 710054;2.自然资源部陕西基础地理信息中心 陕西西安 710054)
GNSS技术经过多年的发展在测绘行业内得到了广泛的应用,其中RTK(Real-Time Kinematic)的表现最为突出。RTK是测量型GNSS接收机实时动态测量的简称,是利用载波相位差分技术实时求差处理基站与流动站的载波相位观测量,求解未知点坐标的测量模式。RTK是目前最快捷、最省力的定位方式之一,常用于施工放样、地形图测绘及像控点测量等方面。目前RTK定位的实际大地高测量精度能否能达到规程要求是研究的热点问题。本文以JJG(测绘)2301—2013《全球导航卫星系统(GNSS)测量型接收机RTK》检定规程为精度判定标准,提出了3种不同的动态观测数据后处理方法,并采用案例分析的手段来验证RTK大地高测量精度的可靠性。
1 RTK测量精度判定依据
1.1 判定依据的选择
RTK测量包括测前准备、外业施测和内业数据处理。测前准备阶段,对于传统型RTK,设备相对复杂,需要逐一进行检查;对于网络型RTK,只需要确定单机性能正常及账号登录稳定即可。在外业施测阶段,传统型RTK施测时需要使用专用电台通信,而网络型RTK不仅需要保障移动通信通道顺畅,还需要在测区内完成RTK点位校正工作。内业数据处理包括数据下载、数据检查和数字成图等。因此,RTK测量精度应从不同角度进行评定。
目前,GNSS测量技术规范主要是针对具体GNSS测量项目对RTK测量精度作出了详细的规定,GNSS检定规程则是针对仪器的性能对RTK测量精度作出了规定。在实际应用中,地形测量、地籍测量和航空摄影测量等对RTK测量精度的要求有区别。因此,GNSS测量技术规范中的技术指标不适合作为验证RTK大地高测量精度的判定依据,而GNSS检定规程是综合被检仪器的测量模式及其性能统一对RTK测量精度进行规定,适合作为验证RTK大地高测量精度的判定依据。
1.2 测量精度可靠性的判定方法
目前,RTK测量精度检测的判定依据是JJG(测绘)2301—2013《全球导航卫星系统(GNSS)测量型接收机RTK》检定规程,对应的检定方法即为判定方法。RTK测量精度检测过程包括外业数据采集和内业数据处理。
RTK测量外业数据采集可参考RTK施测的内容在专用的测试场地进行,而实际操作时则必须使用经过整备或校准的配套设备(对中杆、基座和脚架等)。
RTK测量内业数据处理是判定其测量精度的重要步骤,通常RTK测量得到的是某点的大地坐标(B,L,H),其他成果均需以此为基础计算获得。根据《全球导航卫星系统(GNSS)测量型接收机RTK》检定规程要求,RTK测量精度判定的数据基础是实测基线长度Di,其计算公式为
(1)
式中:(Xi,Yi,Zi)为流动站实测坐标,(X0,Y0,Z0)为参考站已知坐标。利用Di可计算RTK的测量精度ms和RTK的测量重复性mr,检定规程中规定ms和mr均应小于被检仪器的标称精度σ[1]。
2 RTK实测大地高对整体测量精度的影响
实测基线长度值通常由RTK空间直角坐标(X,Y,Z)计算得来,而空间直角坐标又由实测大地坐标(B,L,H)转换而来。在坐标转换过程中,确定了坐标系统就等同于确定了椭球参数,此时只有实测大地坐标作为主要变量参与运算。
在实际作业中,RTK经度和纬度的测量精度往往可以达到标准,而大地高测量精度受多种因素的干扰,常出现与已知高程值相差过大的现象,甚至会超出仪器标称精度。因此,需要分析RTK实测大地高对整体测量精度的影响。
RTK实测大地高对整体测量精度的影响可以通过实验的方法进行论证。通常采用在测量精度计算过程中改变实测大地高的应用方法,分析不同的高程值是否能使RTK整体测量精度产生质变。本文采用3种不同的动态观测数据后处理方法,用案例分析的手段来验证RTK大地高测量精度的可靠性。
2.1 RTK实测大地高的实验应用方法
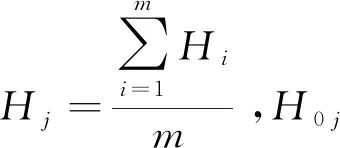
应用方法一:直接使用RTK实测大地高求解基线测量值,并按照检定规程要求计算测量精度。为提高观测数据的可靠性,施测前应做好点校正。应用方法二:用已知大地高代替RTK实测大地高,参与基线测量值解算。即将实验检定场采集的(B0,L0,H0)数据转换为实测的(B,L,H),H0为对应点位的已知大地高,再按检定规程要求评价测量精度[4]。应用方法三:使用修正后的RTK实测大地高解算基线测量值。参照高程异常关系式Hi=hi+ξ[6],拟定GNSS接收机在实验检定场某已知点上的RTK实测大地高平均值Hs。Hs与坐标转换时使用的大地高Hz之间的关系为Hz=Hs+ΔH,ΔH为测高常数[4-6]。若RTK实验检定场内的已知点呈网状分布,可以通过求平均值计算ΔH;若已知点呈线状分布,可以通过直线拟合计算ΔH。求平均值计算ΔH是一种相对简单的方法,求得的RTK测高常数可以在整个专用检定场区内使用。一台仪器通常有一个测高常数,具体计算公式为
(2)
直线拟合计算ΔH适用于已知点呈带状分布的专用检定场,可根据检定场的走向建立大地坐标Bj(或Lj)与RTK测高常数ΔH的线性关系,列线性方程,求解方程未知参数a和b[4]。这种算法求得的RTK测高常数与已知点位一一对应,常数值是因变量。求取常数有两个算法,其线性方程式分别为
ΔH(Bj)=aBj+b(3)ΔH(Bj)=Hj-H0j(4)
基于最小二乘原理,利用线性回归方程可得
(5)
式中:n为RTK检定已知点个数,Bj(或Lj)均以度为单位。
2.2 3种数据后处理方法对测量精度的影响分析
3种数据后处理方法可以得到不同的基线测量值:方法一是实际测量值的计算结果;方法二是人为减少了实测大地高的测量误差,客观性差;方法三较合理地优化了RTK大地高的测量精度,提高了测试数据后处理的客观性。
本文采用3种数据后处理方法,用得到的不同基线测量值来分析实测大地高对测量精度的影响量。首先,利用实例验证3种方法的处理结果能否达到《全球导航卫星系统(GNSS)测量型接收机RTK》检定规程对GNSS接收机RTK测量精度的基本要求;其次,根据不同的实验结果量化实测大地高对测量精度的影响,给出结论。
本文使用两台业界常用的Trimble(R10、R8) GNSS接收机在某专用基线场获取的RTK观测数据作为实验数据进行分析。该专用基线检定场点位按东、西方向呈线性分布,所以方法三中求解常数时适合以“经度L”为变量。Trimble(R10、R8) GNSS接收机的标称实时动态精度:水平10 mm+D×10-6,高程20 mm+D×10-6,具体的测量精度如表1所示,仪器计量性能要求:σ= 22.4 mm。

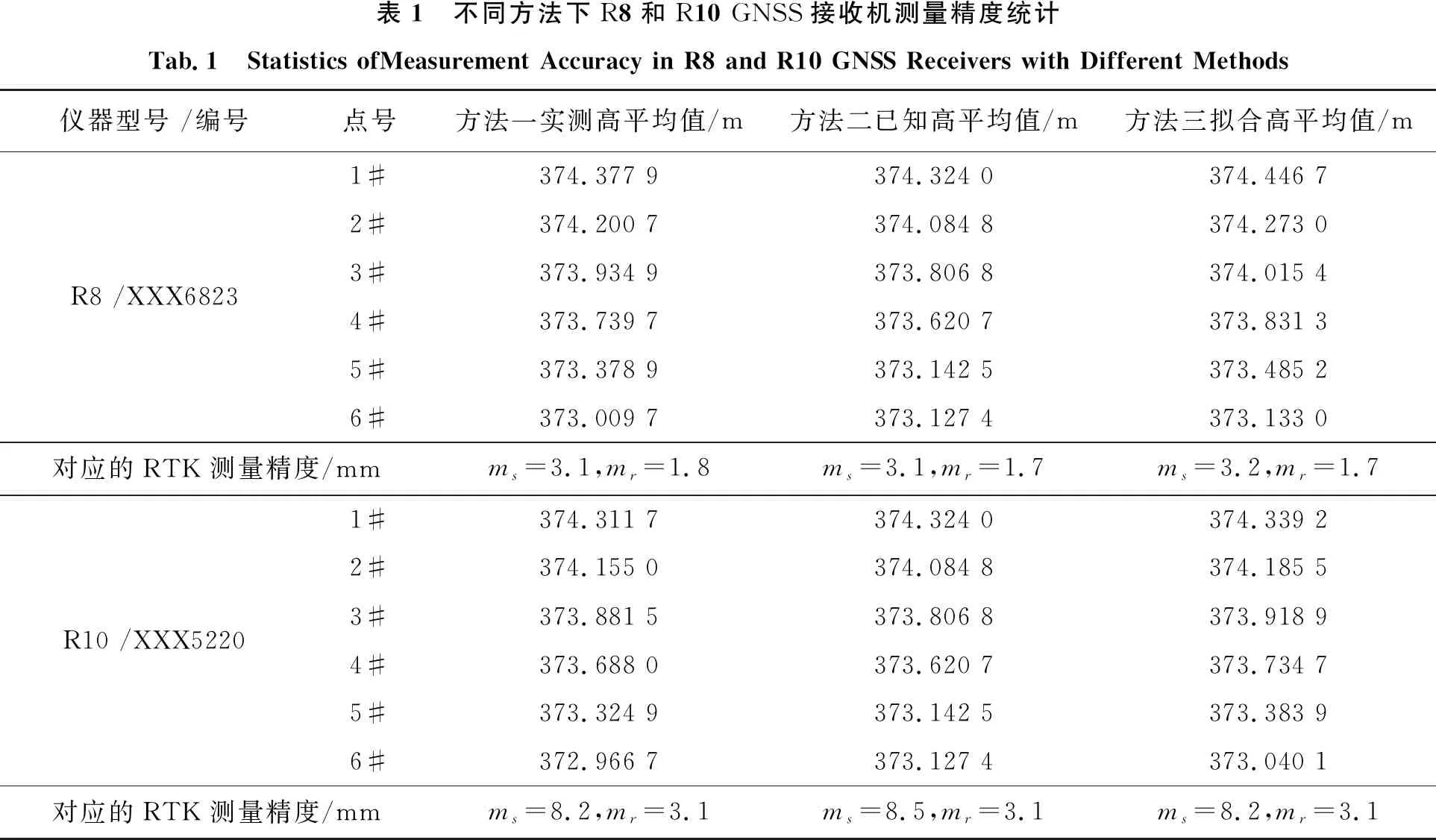
表1 不同方法下R8和R10 GNSS接收机测量精度统计Tab.1 Statistics ofMeasurement Accuracy in R8 and R10 GNSS Receivers with Different Methods仪器型号 /编号点号方法一实测高平均值/m方法二已知高平均值/m方法三拟合高平均值/mR8 /XXX68231#374.377 9374.324 0374.446 72#374.200 7374.084 8374.273 03#373.934 9373.806 8374.015 44#373.739 7373.620 7373.831 35#373.378 9373.142 5373.485 26#373.009 7373.127 4373.133 0对应的RTK测量精度/mmms=3.1,mr=1.8ms=3.1,mr=1.7ms=3.2,mr=1.7R10 /XXX52201#374.311 7374.324 0374.339 22#374.155 0374.084 8374.185 53#373.881 5373.806 8373.918 94#373.688 0373.620 7373.734 75#373.324 9373.142 5373.383 96#372.966 7373.127 4373.040 1对应的RTK测量精度/mmms=8.2,mr=3.1ms=8.5,mr=3.1ms=8.2,mr=3.1