基于高分辨率遥感影像的河流信息提取方法
2022-07-12洪年祥高亚萍
盛 君 王 杰 孙 策 洪年祥 高亚萍
(1.杭州天图地理信息技术公司 浙江杭州 310012;2.浙江省测绘科学技术研究院 浙江杭州 310000)
近年来,随着我国航空工业的飞速发展,高分辨率航空遥感影像在各行业与领域中不断应用。作为空间地理实体与要素中的重要组成部分,在人们日常生产生活中具有重要作用。将高分辨率遥感影像与河流信息联系起来,充分利用河流信息在高分辨率遥感影像中的空间分布特征提取河流信息具有重要的应用价值。
基于高分辨率遥感影像的河流信息提取方法研究经历了两个阶段:一是基于像元的方法,这类方法是将研究对象细化为每一个像元,主要包括决策树、多波段谱间关系法和最大似然法等[1-3]。这类方法的缺陷是只考虑单个像元,没有考虑像元之间的关系,使得河流信息提取效果不明显。二是基于面向对象的方法,这类方法在研究像元本身的基础上,考虑了像元邻近范围内的空间形态特征[4]。首先,根据光谱差异对像元进行分簇,实现影像分割,然后通过不同算法对分割对象进行分类与检测[5]。付勇勇等[6]基于面向对象分析技术,提出一种选取最佳分割尺度和特征规则的方法,采用高分二号(GF-2)遥感影像数据提取河流信息,能够有效地提取复杂水网平原水体信息;李艳华等[7]使用基于规则的面向对象的方法实现了对山区细小水体的精确化提取,并利用形态学膨胀滤波及Pavlidis异步细化算法对提取的细小水体进行后处理,最终得到细小河流的矢量化水系图;黄帅等[8]以GF-1遥感影像为数据源,基于面向对象的河流信息提取方法提取河流信息,提取结果较最大似然分类法更好。随着机器学习分类器算法的不断发展,基于面向对象河流信息提取的准确率也得到相应的提高,但仍存在河流提取结果中断、河流识别率低等问题。本文充分发掘遥感影像中多特征融合的优势,提出了一种基于多特征融合的河流信息提取方法,并通过试验对提出的方法进行验证。
1 研究方法与思路
河流、湖泊水体在红外遥感影像中表现为蓝黑色或红色,在真彩色影像中表现为绿色或墨色,这种颜色上的差异有助于目视判别。本文根据水体在水体指数、阴影水体指数、纹理特征和颜色特征方面与遥感影像中其他地理要素的差异,对初始水体进行检测,然后通过对提取水体边界进行优化得到最终水体检测结果,技术路线如图1所示。
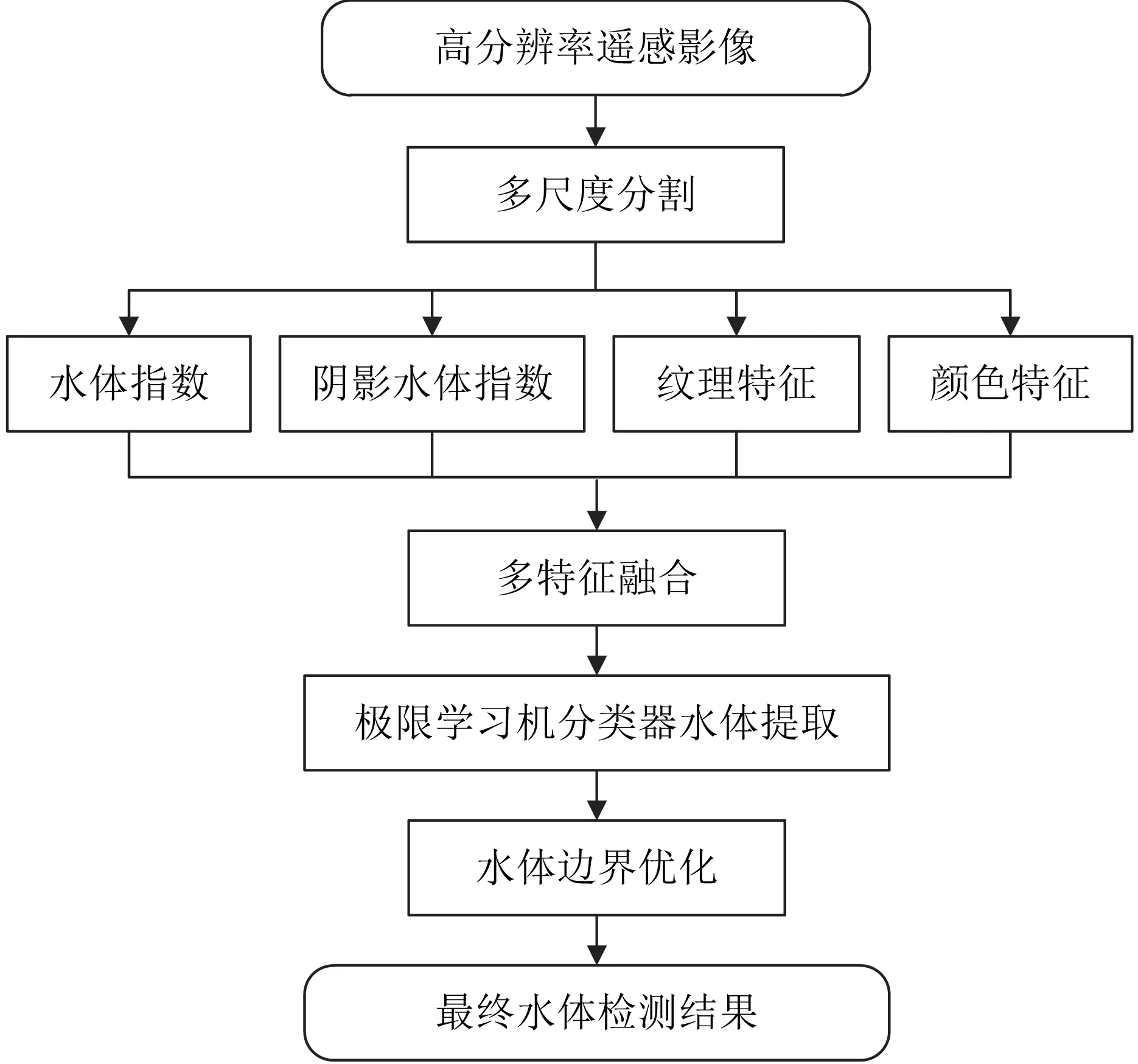
图1 水体检测技术路线
1.1 水体指数
水体信息对近红外波段具有较强的吸收特性,对绿色波段具有较强的反射特征,根据这种特征差异性可以有效提取水体信息,抑制背景地物。根据二者的具体吸收与反射量化值可计算得到归一化差异水体指数(NDWI)[10]。NDWI阈值可根据具体影像区域的特征进行设置。
(1)
式中:b1、b4分别为绿波段和近红外波段的亮度值。
1.2 阴影水体指数
为了得到较为“干净”的水体信息,需要滤除阴影信息。可以通过构建阴影水体指数(SWI)的方式区分阴影信息[11]。
SWI=b1+b2-b4
(2)
式中:b1、b2、b4分别为绿波段、蓝波段和近红外波段的亮度值。
1.3 纹理特征
遥感影像中,水体区域纹理信息通常较为均匀与平缓,表现出较强的噪声抵抗力,而非水体区域地理要素的纹理信息则较为丰富。因此,可根据水体与其他地理要素纹理特征的区别进行水体信息提取。本文使用线性反投影算法(Local Binary Patterns,LBP)进行纹理特征提取。LBP算法对影像旋转、变形及强度变换具有一定的不变性,能够提取影像不同尺度的局部特征。LBP算法实现纹理特征提取的方法[11]:首先,创建3×3像素窗口,比较邻域像素值与窗口中心像素值大小,若邻域像素值大于窗口中心像素值,则将该邻域位置标记为1,否则标记为0,最终得到8个0与1;其次,将0与1排列得到一个二进制数据,转换此二进制数后的十进制数即为中心要素局部纹理值,如图2所示。局部纹理值可有效表现出不同地理要素纹理特征。

图2 基于LBP算法的纹理特征提取
1.4 颜色特征提取
在遥感影像中,水体区域的颜色通常表现为偏绿或偏黄。为了量化地理要素的颜色特征,计算颜色特征值,假设影像波段号为i,则第i波段像素均值为
(3)
式中:mi为像素均值,pi,j为像素值,n为像素个数。
影像离散程度可表示为
(4)

1.5 多特征融合
水体与非水体区域通常很难通过单一特征来反映,本文采用特征值串联的方式将多特征量化值进行融合,以充分挖掘水体区域信息。因上述特征量化的数据级别不同,故在基于特征进行影像分类前需要对多种特征数据进行归一化处理,避免不同特征在分类时相互影响。特征向量x归一化后的特征值yi为
(5)
式中:xi为特征向量值;xmin、xmax分别为x的最小值和最大值。
遥感影像中,特征影像的总维数就是颜色特征中的2个特征值、纹理特征中的1个特征值、水体指数中的1个特征值及阴影水体指数中的1个特征值的和。
2 算法实现过程
2.1 选择机器分类器
水体边界提取其实就是一种影像二分类,通常使用随机森林(RF)分类器、极限学习分类器、支持向量机(SVM)和AdaBoost集成分类器等[12]进行影像二分类。本文根据遥感影像中的不同特征,使用分类器进行水体边界提取试验。本文通过对随机森林(RF)分类器、极限学习分类器、支持向量机(SVM)和AdaBoost集成分类器进行试验对比分析,以选择合适的分类器。水体检测精度通常用准确率A、精确率P及召回率R来评价。基于上述4种分类器对水体的提取精度如表1所示。

表1 4种不同分类器提取的水体精度单位:%Tab.1 Precision of Water Body Extracted by Four Classifiers试验精度指标RF极限学习分类器SVMAdaBoost试验1A91.7494.2192.3593.02P82.0484.6883.1583.21R79.1081.3479.2479.83试验2A89.5693.7290.7891.27P82.1383.3081.6782.42R78.2780.1077.4079.02
由表1可知,试验1中极限学习机分类器的准确率A、精确率P及召回率R分别为94.21%、84.68%、81.34%,试验2中准确率A、精确率P及召回率R分别为93.72%、83.30%、80.10%,相比于其他分类器,极限学习机分类器的水体提取精度更高,表明极限学习机分类器更适用于本文提出的多种融合特征的河流信息提取方法。
2.2 水体边界优化
使用分类器检测待检测遥感影像中的所有对象,得到初始水体检测结果。初始水体检测结果中存在误检现象,本文使用颜色空间距离、纹理相似度与角点分布差异3种判断依据,剔除错误匹配对象。
2.2.1 颜色空间距离
在颜色空间中定义:
(6)
式中:DRGB,q为水体区域与待确定对象的颜色空间距离,mi为该影像对象的均值向量。
指数函数PRGB=10DRGB,q,将其作为距离阈值,若计算颜色空间距离大于该阈值,表明待检测对象非水体。
2.2.2 纹理相似度
首先定义水体对象与待检测对象在纹理空间中的距离,通过比较计算距离与纹理距离阈值的大小判断待确定对象是否为水体。纹理距离阈值PLBP可表示为
PLBP=10DLBP,q
(7)
式中:DLBP,q为水体对象与待确定对象的距离,也是待确定对象纹理特征值mLBP,q与纹理均值mLBP的差值。
2.2.3 角点分布差异
水体区域在遥感影像中的表现通常较为平坦,水体对象的角点特征数量少,而非水体区域的角点特征数量相对较多,故可基于角点分布的差异来判断待确定对象是否为水体。角点分布指标mc.q为某待确定对象的角点总数N与像素总数S的比值,其中角点特征通过MinEigen算子提取得到。
若存在面积较大的待确定对象,需要选择并计算5个子区域角点分布指标均值mc,则角点分布差异Dc,q可表示为
Dc,q=|mc,q-mc|
(8)
角点分布判断依据Pc=10Dc,q,若N>Pc,则表示待确定对象为水体对象。通过不断试验,当N=2.2时,水体提取效果最好。
2.2.4 投票决策
本文根据颜色空间距离、纹理相似度与角点分布差异3种特征之和判断依据,基于软投票方法判断待确定对象,决策函数为
P=PLBP+PRGB+Pc
(9)
设置投票阈值T,当待确定对象的投票值P小于阈值T时,将对象标记为水体区域,否则标记为非水体区域。经过多次试验,当投票阈值T=2.5时,水体检测效果最好。
3 试验与结果分析
为了对基于多特征融合的河流信息提取方法的有效性及优越性进行检验,本文选取某地2019年高分辨率遥感影像作为数据源进行试验验证,使用准确率A、精确率P及召回率R来评价提取结果。其中,准确率A表示提取正确样本占总样本的比例;精确率P表示正确提取为水体的样本占总水体样本的比例;召回率R表示正确提取为水体的样本占提取出水体样本的比例。3种评价指标可表示为[13]
(10)
式中:FN为非水体中错误判断像素数量,TN为非水体中正确判断的像素数据,Fp为水体中错误判断的像素数量,Tp为水体中正确判断的像素数量。
影像数据分辨率为0.5 m,影像大小均为6 908个像素×7 300个像素。在样本数据训练中,为了得到更多样本数据,对训练数据进行平移和旋转。
依次提取遥感影像中的多种特征,构建五维特征空间向量,使用极限学习机分类器进行训练。选择一组高分辨率遥感影像数据作为试验数据,使用训练后得到的模型对试验数据中的水体区域进行检测,结果如图3所示。

图3 遥感影像水体检测结果
由图3可知,初始水体检测结果中包含较多的高大建筑物和树木的阴影信息,通过软投票法有效去除了阴影的干扰,得到优化后的水体检测信息。初始水体检测结果及优化后水体检测结果的精度统计如表2所示。
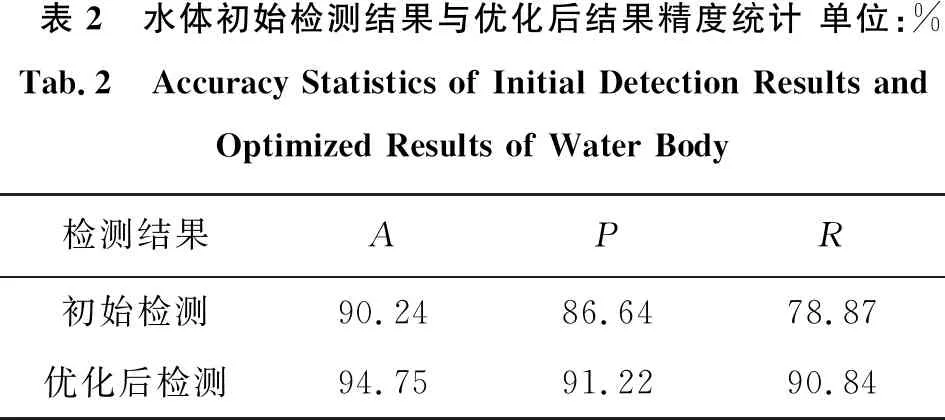
表2 水体初始检测结果与优化后结果精度统计 单位:%Tab.2 Accuracy Statistics of Initial Detection Results and Optimized Results of Water Body检测结果APR初始检测90.2486.6478.87优化后检测94.7591.2290.84
由表2可知,初始水体检测结果中,相比于精确率与召回率,准确率更高,为90.24%,是由于初始水体检测中的误检和漏检现象较为严重。通过软投票法对初始水体检测结果进行优化,优化后的水体检测结果无论是正确率、精确率还是召回率都有了一定程度的提升,其中召回率的提升率最高,从而验证了本文提出的基于多特征融合的河流信息提取方法的有效性及优越性。
4 结 语
本文提出的高分辨率遥感影像多特征融合的河流信息提取方法,充分考虑了遥感影像中的多种空间特征,通过极限学习机分类器结合软投票法提取河流信息,并进行了试验验证。
结果表明,与初始水体检测结果相比,使用软投票算法优化后的水体检测结果无论是在准确率、精确率还是召回率上都有了一定程度的提高,有效抑制阴影信息的干扰。由于本文使用的试验数据有限,得到的结果还有待进一步验证,下一步将扩大范围,进行整个流域或更大范围的河流水系提取研究,同时将本文方法应用于遥感影像中其他地理要素的识别与检测等。