一种阀门接收/解体装置的设计研究
2022-07-11沈琪任佳慧段宏王广开吴德慧王君豪
*沈琪 任佳慧 段宏 王广开 吴德慧 王君豪
(1.中国核电工程有限公司 北京 100840 2.北京化工大学 化学工程学院 北京 100029)
1.设备介绍
后处理厂房中有很多与高放流体介质直接接触的设备[1-4],接触过高放流体介质的破损穿地阀芯,是一种高放固体废物,根据检修原则,需要被解体、处理。阀门接收/解体装置位于α废物和高放废物整备设施中,对送来的各型号穿地阀芯进行接收、解体、装桶及转运。穿地阀门通过检修容器将阀门吊装入该设备,阀门在设备内完成分段解体过程,并通过收集运输装置将解体后的阀门收集并运输至指定位置。
2.设备结构设计

图1 阀门接收解体装置结构示意图
阀门接收解体装置主要包括外围设备组件、上箱体组件、下箱体组件、操作机构总装、下箱体机构总装及电气控制系统组成等部件。
(1)上箱体组件与下箱体组件
上、下箱体均采用壳体形式,由3mm不锈钢板焊接而成,形成密封腔体以防止污染气氛扩散。上箱体顶部预留有阀芯进入的通道,前后设有两个各装有6个手套孔的钢化玻璃板,人员可通过手套组件对阀芯的后段与中段之间的连接销进行拆除。底部设有转运通道和可移动盖板,与下箱体焊接连接。通道用于运送解体阀芯,盖板关闭时,可将上下箱体气氛隔绝。
上箱体设置有进、排风过滤器用于通风。上、下箱体均设有耐辐照灯具用于照明、袋封检修门用于操作机构进行维修更换时零件的进出、γ剂量率报警仪用于剂量监测。
下箱体壳体一侧,与阀芯装桶的热室通过密封焊接相连,与上箱体组件连接的转运通道口附近设有主从机械手及窥视窗,当手动进行阀门解体出现卡滞等异常状况时,用于人员辅助操作。
(2)操作机构总成
操作机构总成安装在上箱体组件内部,是阀门解体装置的主要部件,主要由支撑框架、螺旋升降机、上夹紧平台、下夹紧平台等组成。
4台螺旋升降机构安装在支撑框架底板上,每2台为一组,通过安装在箱体屏蔽层外部的驱动机构提供动力,分别驱动上、下夹紧平台的上升和下降,电机可根据不同型号的阀芯调整升降高度。
上、下夹紧平台功能和结构类似,通过安装在平台上的伺服电机驱动丝杠运动,实现对阀芯组件卡爪部位的夹紧和放松;上下夹紧平台设有四个导向柱进行升降动作时的导向。
阀芯拆卸解体时,根据对应的阀芯型号,上夹紧平台先升至合适高度,接收阀芯并夹紧卡爪2;下夹紧平台再上升至预定高度,夹紧卡爪1;上夹紧平台保持不动、下夹紧平台下降,实现最底部阀芯部件的解体分离;后续阀芯部件的分离待剂量率检测合格后、人工通过上箱体的手套孔操作进行。

图2 操作结构总成示意图
(3)下箱体机构总装
下箱体机构总装安装在下箱体组件内部,包括小车支架、转运车、顶升装置、接料桶和通道调节装置等。
小车支架由不锈钢型材焊接而成,为转运车及顶升装置等提供结构支撑;转运车通过链轮链条驱动,用于接料桶在热室和本设备下箱体转运通道之间进行转运;顶升装置采用螺旋升降的方式,将钢桶顶升至合适高度,以便于解体时阀芯可顺利装入:通道调节装置通过安装在外部屏蔽层上的驱动机构提供动力,驱动220mm厚的屏蔽块合拢或分开,起到补充屏蔽的作用。
(4)外围设备组件
外围设备组件主要由钢结构组件、屏蔽层组件、主从机械手及驱动机构组件等组成。屏蔽层组件提供上、下箱体的屏蔽防护,材料为碳钢板。位于上箱体前后操作面的屏蔽层为电机驱动的屏蔽门结构,可在人工操作时通过齿轮齿条机构驱动屏蔽门水平移动打开,屏蔽层顶部设置有与检修容器转运装置的对接接口;下箱体屏蔽层通过膨胀螺栓固定在地面上,在下箱体检修密封门的对应位置设有防护门,在主从机械手下方设置有窥视窗。主从机械手通过穿墙管安装在屏蔽层上,内侧与下箱体组件形成密封。
钢结构组件设置在屏蔽层外侧,包括上下两侧操作平台、爬梯及护栏等。下层平台为阀芯解体时工作人员的操作平台,上层平台为阀门检修容器对接时工作人员的操作平台,进行屏蔽容器对接时的人工辅助操作,上下平台均设有护栏保证工作人员的安全,上下平台设有爬梯。
除上箱体内部的夹紧驱动电机外,其他驱动部件的电机减速机部分均固定安装在屏蔽层组件上,通过屏蔽层穿墙传动件将动力输送至箱体内部的执行机构上,包括转运车驱动机构、顶升装置驱动机构、通道调节驱动机构、上夹紧平台升降驱动机构、下夹紧平台升降驱动机构等。
(5)电气控制系统
阀门接收解体装置配置有一套电气控制系统。每套电气控制系统包括一台控制柜和一个就地按钮盒、电气设备之间的电缆(低烟无卤阻燃电缆)及其敷设电缆桥架及附件。
电气系统控制主要功能:通过内部可编程控制器实现阀门接收解体装置各子系统设备的运行过程中控制信号的采集和设备控制联锁,确保设备安全可靠地连续运行。
3.电机选型计算
(1)夹具升降平台升降伺服电机选型计算
此电机用于驱动夹具平台的垂直升降运动功能,满足穿地阀门的垂直提升/下落定位。

图3 夹具升降平台升降传动系统图
①电机功率及转速计算
夹具平台与穿地阀门的最大总重量:900kg。
夹具平台升降速度V=0.83×n/60,n为蜗杆输入转速。
输入轴转动一圈平台升降的位移,按照升降机输入轴的最大输入转速1400rpm计算:
夹具平台最大升降速度V=0.83×1400/60=0.0194(m/s)。
按照整条传动链的传动效率η最低为10%计算,电机所需最大输入功率:
P电机=F×V/η=mg×V/η=9000×0.0194/0.1=1746W。
②伺服电机扭矩计算
根据供方提供的计算,单个升降机按照1吨的负载工况下涡轮升降器的启动扭矩为T启动=8N .m,T运行=5.2N .m。
对于此传动系统,电机扭矩分配给左右两个涡轮丝杠升降机。对于电机经过换向器与丝杠升降器连接,电机所需的输出扭矩:
T电机=2×T电机-(i×η)=2×8/(2×0.7)=11.4(N .m)。
根据以上计算,选用西门子V90系列伺服电机1FL6067-1AC61-2LA1可以满足工况要求。下表为该伺服电机动力参数:

表1 伺服电机1FL6067-1AC61-2LA1选型数据
(2)夹具伺服电机选型计算
此电机用于驱动夹具同时相对和相反运动功能,满足穿地阀门装夹后固定在升降平台上。

图4 夹具升降平台升降传动系统图
①电机功率及转速计算
电机输出功率为传动系统摩擦力的功率损耗及夹具的运行功率。
设定单个夹具的最大运行速度V=0.05m/s,功率P=f×V=μ×N×V,式中,μ为滑动摩擦系数,对于不锈钢,μ取值0.3;N为施加在梯形丝杠副上的整压力,对于单个梯形丝杠螺母副,N=0.5W(W为单边夹具体所受的重力,按照250kg计算,W=Mg=250×10=2500N)。考虑将阀芯从夹持面滑动摩擦脱离单边夹具所需功率:
P=f×V=μ×N×V=0.3×2500×0.05=37.5W
电机输入功率为P电机=2×P/η,η为传动链的整体传动效率,取η=0.2,则有:
P电机=2×37.5/0.2=150W
梯形丝杠最大转速n1=60×V/0.001×P=60×0.05/0.005=600rpm(式中,P为丝杠的导程,设计P=5mm),因此电机最大转速为n=600rpm。
②电机扭矩计算
丝杠转动时,夹具所需的推力等于摩擦力。需要施加在丝杠上的扭矩
T=(Fa×0.001P)/(2×3.14×η1)=(f×0.001P)/(2×3.14×η1)
式中,η1为丝杠副的传动效率,取值η1=0.3。f=0.3×2500=750N。
单边夹具丝杠需要输入的扭矩为:
T=(750×0.005)/(2×3.14×0.3)=3.75×1884=199(N .m)。
折算电机的输入扭矩为:
T电机=2×T/(i×η换向器传动链)=3.98/(2×0.7)=2.84(N .m)。
根据以上计算,选用西门子V90系列伺服电机1FL6044-2AF21-2LA1可以满足夹具平台升降所需的工况要求。下表为该伺服电机动力参数:
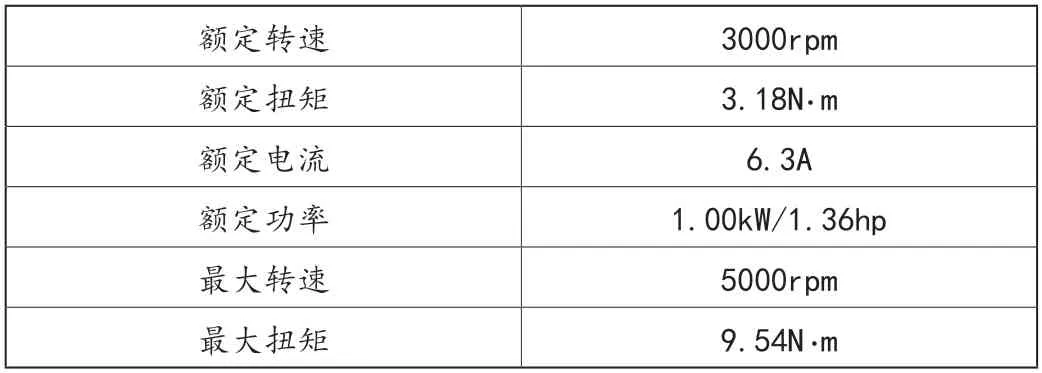
表2 伺服电机1FL6044-2AF21-2LA1选型数据
4.结语
本设备结合穿地阀门的结构特征,采用自动加手动的操作模式,实现了对穿地阀门的穿地阀门的接收、分段拆解及装桶转运,通过理论计算验证了操作机构的机械性能的可靠性,为高放废物穿地阀门解体的工程应用提供了宝贵的经验与理论支撑。
