基于FBG的悬臂梁式微力与微位移传感单元
2022-07-10彭星玲茶映鹏叶建雄刘萍先
彭星玲,茶映鹏,叶建雄,刘萍先
(1.南昌工程学院 江西省精密驱动与控制重点实验室,江西 南昌 330099;2.浙江机电职业技术学院,浙江 杭州 310053)
1 引 言
力和位移是表征物体受力或变形状况的显著参量,力和位移传感器能够实现称重[1-2]、多维力[3-5]、结构件变形[6-8]和运动部件位移[9-11]等参数测量,从而对于精密加工中机床表面变形、切削力,精密测控中机器人指力腕力,大坝桥梁飞机等结构件的安全监测等具有重要意义。与传统电学类传感器相比,基于FBG的力或位移传感器具有显著的优势,如微型尺寸,耐腐蚀能力强,抗电磁干扰、电气绝缘性好、可进行波长编码,不受光源功率波动和系统损耗的影响,抗干扰能力强,测量精度高,易于联网形成智能传感网络[12-13]。因此,基于FBG的力或位移传感器受到越来越多学者的关注。冯艳等人[1]设计了一种灵敏度可调的小量程称重传感器,在0~2 N的加载范围内,理论与实验灵敏度之间的平均相对误差为6.46 %。VIEIRA J C 等人[2]将 FBG 传感器埋置在硅橡胶托盘底部制作了称量单元,在5 mN~5 N范围内获得了良好的实验结果。汪苏等人[5]设计了一种用于机器人腕部结构的FBG多维力传感器,力灵敏度约为6.7 pm/N。REN Hongliang等人[9]设计了一种结构紧凑的悬挂式FBG力与位移传感器,其力与位移灵敏度分别是-345.2 pm/N和-219.69 pm/mm,力分辨力为2.9 mN。郭 永兴 等 人[10]制作了一种滑动式FBG位移传感 器,在0~100 mm的测量范围中,灵敏度为20.11 pm/mm。陈宇佳等人[11]设计了一种弓型FBG微位移传感 器,量程为1mm 时,传感器的灵敏度为2.02 pm/μm,线性相关系数为0.9983。FBG在力和位移测量两方面都大有可为,但对于同时测量微力和微位移,且灵敏度可调满足不同量程要求这方面的研究报道还很少。
本文通过在悬臂梁上粘贴FBG的方式,设计了一种基于双FBG的悬臂梁式微力和微位移传感单元。该传感单元结构简单操作灵活,能够实现温度补偿,力灵敏度和分辨力高,通过调整悬臂梁固定端的位置可实现位移灵敏度可调可控,可满足不同量程的不同灵敏度的微力和微位移应用场合。
2 利用悬臂梁进行力和位移传感的工作原理
FBG在应变和温度的作用之下,产生的弹光效应、热光效应和热膨胀效应将会使FBG的有效折射率和光栅的周期发生变化,从而引起FBG反射波的峰值波长变化,轴向应变和温度变化量引起的反射峰值波长的相对变化为[14]:
ΔλB/λB=Kεxεx+KTΔT
(1)
式中,Kεx表示轴向应变灵敏系数;KT表示温度灵敏系数,通过监测FBG传感器的中心波长偏移量,可获得外界信息参数。
轴向应变灵敏系数和温度灵敏系数与传感器的结构息息相关,传感单元的结构起着外界信号传递的作用,结构合理的传感单元可以对FBG传感性能起到结构化调节的作用。悬臂梁结构简单,强度较高,加工容易,黏贴方便,作为传感单元的弹性体结构,容易实现高灵敏度的力和位移的测量。
传感单元结构如图1所示,通过托盘支点A向传感梁施加作用力,托盘固定在悬臂梁自由端,悬臂梁的另一端通过两个内六角螺钉和楔块结构固定住,固定端的位置可通过调松螺钉后,让悬臂梁左右移动来调节自由端A点与固定端C点之间的距离L,FBG距离自由端的距离为L1,距离固定端的距离为L2,且L=L1+L2。传感梁的上下两表面相同位置粘贴FBG后,自由端离FBG1和FBG2的位置L1便保持固定,而两支FBG在悬臂梁的上下表面对称安装可构成差动式传感,能消除环境温度变化的影响,同时可提高力灵敏度。
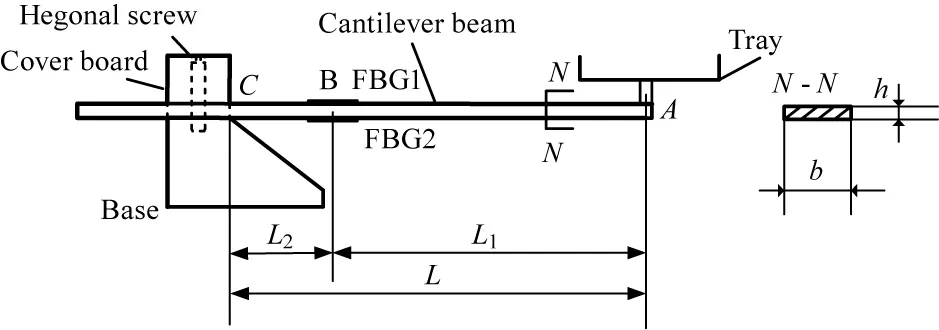
图1 悬臂梁式传感单元示意图
悬臂梁右侧受力F作用时,FBG1 受到拉力产生正应变,FBG2 受到压力产生负应变。当应变和和温度同时变化时,梁上、下面的应变数值相等,符号相反,故FBG1和FBG2 产生大小相等方向相反的应变。

(2)
由式(1)可得:
(3)
进一步可得:
ΔλB/λB=(ΔλB1-ΔλB2)/ΔλB
=2Kεxεx=KFF
(4)
由于二氧化硅光纤Kεx=0.784/ε,则力灵敏度系数为:
(5)
根据材料力学理论,悬臂梁的挠曲轴近似微分方程为[15]:
(6)
式中,ω为梁受力变形后的挠度值,根据边界条件固定端处横截面的转角dω/dx=0,挠度ω=0,对悬臂梁的挠曲轴微分方程积分两次可得悬臂梁挠度方程为[15]:
(7)
而最大挠度发生在悬臂梁的自由端,即x=L处,将x=L带入式(7),自由端的位移sz等于梁的最大挠度ω(L),即为:
(8)
将L=L1+L2代入式(4)和式(7)得:
(9)
则位移灵敏度系数为 :
(10)
3 传感实验与结果
进行力与位移测量时,制作了总长为180 mm,b=22 mm,h=0.6 mm的矩形悬臂梁。FBG沿轴向被环氧树脂胶粘贴在梁的上下表面,其中央部位固定于L1=86 mm的B处,栅区的长度为10 mm,采用光纤光栅网络分析仪监测 FBG 反射谱的中心波长λB。悬臂传感梁采用304不锈钢,其弹性模量E=190 GPa,L在99~149 mm的范围内可调。悬臂梁式传感单元实物图如图2所示。
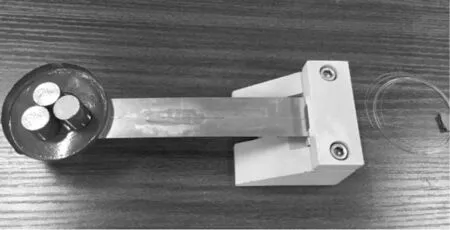
图2 悬臂梁式传感单元实物图
传感性能实验中,在传感梁上下表面相同位置处分别粘贴相同FBG,上表面的FBG标记为FBG1,下表面的FBG标记为FBG2,它们在室温时的初始中心波长分别为λB1=1550.117 nm,λB2=1550.095 nm。在每一个A点位置处,重物质量从0~120 g,相应的力为0~1.2 N,中间间隔0.2 N进行加载力传感实验,反复进行三次实验取平均值,在加载力的同时,采用游标卡尺测量悬臂梁自由端的位移变化值sz,传感单元的力和位移传感性能如图4~6所示。

图3 长度L不同时FBG的力传感性能

图4 长度L不同时位移对力的响应性能
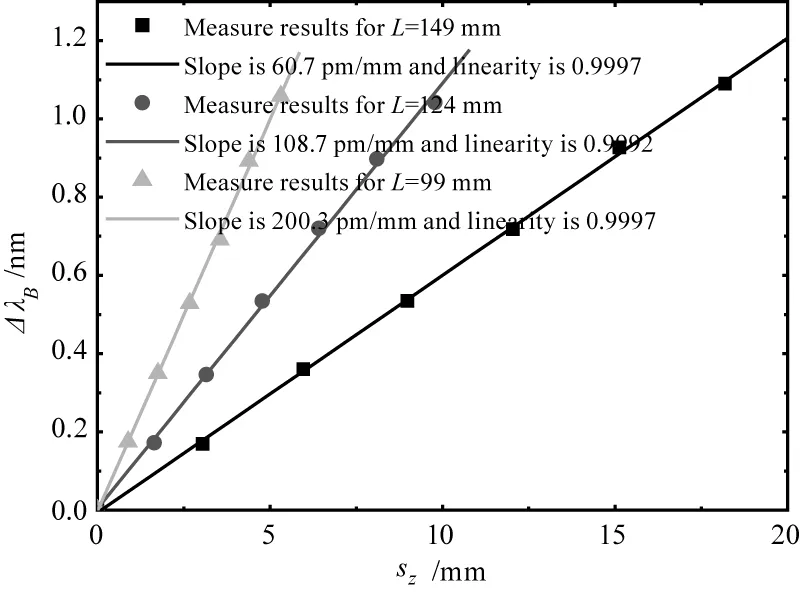
图5 长度L不同时FBG的位移传感性能
实验结果表明:在0~1.2 N范围内,悬臂梁长度分别从99 mm增加到124 mm和149 mm时,随着力的增加,波长产生了红移,力灵敏度基本保持不变,平均实验力灵敏度为889 pm/mm,位移随着力的增加而线性增大,位移灵敏度随着L的增大而减小,传感单元的力和位移的线性度均达0.999以上,保持了优良的线性。
4 传感器灵敏度与分辨力分析
4.1 力灵敏度与分辨力分析

4.2 位移灵敏度可调分析
5 结 论
本文所设计的微力和微位移传感单元应用差动FBG传感器的波长漂移消除了温度误差,结合可调式悬臂结构实现了位移灵敏度的可调控制。实验研究表明,力传感单元在0~1.2 N的加载范围内,力平均灵敏度约为889 pm/N,线性度不低于0.999,理论灵敏度与实验灵敏度之间的平均相对误差为6.6 %,力分辨力为1.1 mN。在悬臂梁长度为99 mm时,位移灵敏度高达200.3 pm/mm,位移分辨率为5 μm。通过优化结构参数,传感器的性能可进一步提高,能够满足不同量程的不同灵敏度力与位移测量场合,尤其对于微力和微位移测量应用前景广阔。
