多体空气动力学研究进展
2022-07-10艾邦成
宋 威 艾邦成
(中国航天空气动力技术研究院空气动力科学中心,北京 100074)
引言
多体飞行器普遍存在于航空航天、空天和武器系统领域中,主要有以下几种典型类型:(1) 多个飞行器相互不接触的近距离飞行(close proximity flight,CPF)[1],主要应用场景包括编队飞行(formation flight,FF)[2-3]和拖曳飞行(towed flight,TF)[4-6]等;(2) 多体飞行器相互接触或组合飞行,如飞机-存储物携带飞行(aircraft-store carriage,ASC)[7]、多级飞行器(multistage vehicle,MSV)的助推飞行[8]等;(3) 多体飞行器回收或解锁分离后的相对运动过程,主要应用场景有:空中回收(aerial recovery)无人机[9]、飞机-存储物分离(aircraft-store separation,ASS)[10-13]、飞机-座舱盖分离(aircraft-canopy separation,ACS)[14]、弹射救生系统分离(ejection seat separation,ESS)[15]、多级飞行器的级间分离(stage separation,SS)[16-18]、载人航天器发射逃逸系统(launch escape system,LES)的中止分离(abort sepatration)[19]、低空整流罩分离(fairing or shroud separation)[20-21]、多薄片分离(multi-plates separation,MPS)[22-23]、子母弹分离(cluster munition separation)[24-25]、流星体破碎化(meteoroid fragmentation) 和太空碎片(space debris) 脱离轨道[26-30]等等.
多体飞行器在飞行和分离过程中存在与空气介质的相对运动,空气介质的相对运动必会在多体飞行器上产生空气动力效应.多体飞行器与孤立体(isolated body)飞行器的流动控制方程并无本质上的区别,其主控流动方程仍为纳维-斯托克斯(N-S)方程.然而,多体飞行器间存在相互的流场干扰或作用(multibody interference or interaction),使多体飞行器具有不同于孤立体飞行器的流动特征和空气动力学特性[31-32].特别是在超声速流动中,多体间尚存在多重激波反射(shock wave reflection)、衍射(diffraction)以及激波与旋涡、激波与边界层间的相互干扰或作用,使得多体间的空气动力学特性变得更加复杂[33-36].
图1 所示为不带舵面和翼面的细长孤立体和多体相近布置时的扰动流场对比图[32],图2 为两细长旋转体风洞实验所获得的流场干扰阴影图[32],试验马赫数为Ma=2.5 .从图1 可看出孤立体和多体间的流动特性有较大差异,孤立体飞行器的扰动流场(disturbance flowfield)会传播到整个区域(图1(a)所示),而多体飞行器的前部均产生冲击激波,多体间存在多重激波反射,衍射等复杂流动现象(图1(b)和图2),复杂流动现象必然严重影响着多体空气动力学特性,并改变多体飞行器分离后的运动轨迹和姿态角[32].正如Chaplin 等[36]所述“多体飞行器与孤立体飞行器相比,冲击扰动引起的静压和流动角度的变化改变了多体间的局部和整体空气动力学特性,当多体飞行器包括尾翼、舵面等复杂部件或具有复杂升力构型时,多体间的流场干扰效应可能会更加明显和复杂”.

图1 孤立体和多体飞行器间的扰动流场对比图[32]Fig.1 Comparison of disturbed flowfield between isolated-body and multibody vehicle[32]
图2 所示的多体飞行器在风洞中处于静止不动(steady-state)状态,相当于真实飞行器的定常飞行状态,而当多体飞行器处于快速非定常(unsteady)或动态机动(dynamic flight)飞行状态时,多体飞行器间会出现复杂的非定常流动(unsteady flow)现象,多体间的瞬态或非定常气动力既依赖于当时的气流状况,又依赖于前一段时间内气流运动的整个时间历程,此时多体间的空气动力学特性不仅与运动学参数有关,且与运动学参数的变化率有关[37].
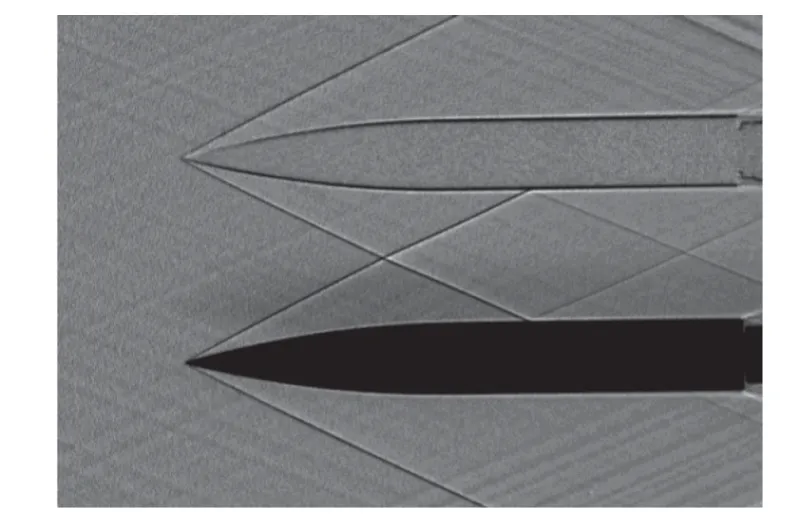
图2 典型的多体间的流场干扰阴影图 (M a=2.5)[32]Fig.2 Shadow diagram of flowfield interference among typical multibody (M a=2.5)[32]
由于多体飞行器应用领域广泛性和多体间的流动物理与孤立体飞行器差异性,本文引入“多体空气动力学(multibody aerodynamics)[38-39]”概念对飞行器“多体干扰与分离”这一类问题进行概括和总结.引言部分简要概述多体空气动力学的基本内涵、与孤立体空气动力学的相似性和差异性;第二节重点阐述多体飞行器的构型、几种典型飞行和分离类型、特点及相应的空气动力学问题;第三节和第四节分别对典型的串联和并联构型多体飞行器在超声速飞行时的气动特性和流动结构进行总结;最后一节为总结.
1 多体飞行器的构型、典型飞行和分离类型
1.1 多体飞行器的构型分类
多体飞行器系统主要有以下三大构型:(1)串联构型(tandem configuration),是一种纵向排列形式;(2) 并联构型(parallel configuration),是一种横航向排列形式;(3) 串并联混合构型(tandem and parallel configuration),是一种纵向和横航向混合排列的形式,图3为多体飞行器的构型分类示意图.
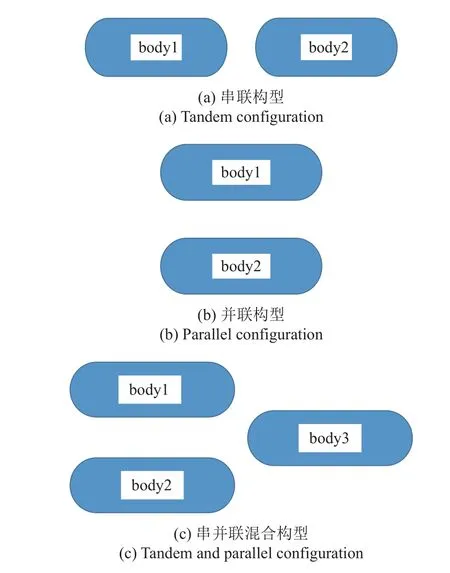
图3 多体飞行器构型分类示意图Fig.3 Classification of multibody vehicle configuration
1.2 典型的飞行和分离类型、特点及问题
1.2.1 多体飞行器相互不接触的近距离飞行
多个飞行器的近距离飞行是典型的多体飞行器系统,如编队飞行和拖曳飞行.该类多体飞行器系统主要特点是多个飞行器不接触,但多体飞行器间存在相互流动和气动干扰,需要研究多个飞行器间的空气动力学问题[40],用于指导近距离飞行器的控制和相互间距的优化设计.从多体飞行器的构型分类看,近距离飞行系统多为串联和并联混合构型,近距离飞行器在每个方向上均存在间距.
(1) 编队飞行
编队飞行是指具有完整飞行控制系统的两个或多个飞行器按特定的编队形式所组成的一种执行任务模式的飞行[41],如图4 所示.紧密编队飞行时可以减小整体的飞行阻力,提高气动效率、减少燃油耗量,有效地增加编队飞机的航程和续航时间[42].如有人机/无人机的智能协同、无人机集群或蜂群作战[43-44]等.

图4 编队飞行示意图Fig.4 Schematic diagram of formation flight
当近距离编队飞行器处于定常(steady)或静态飞行(static flight)状态时,多体间气动力为定常的,也称为时间平均(time-averated)的气动力,气动力主要与马赫数Ma、气动外形、姿态角 Λ 等参数有关,可将多体飞行器固定不动进行风洞实验或数值模拟研究.当近距离编队飞行器处于快速非定常动态飞行状态或大攻角机动时,多体间会出现复杂的非定常流动现象,多体间的气动力是非定常或瞬态(transient)的,非定常空气动力既依赖于当时的气流状况,又依赖于前一段时间内气流运动的整个时间历程,此时多体间的空气动力学特性不仅与运动学参数有关,且与运动学参数的变化率有关,需采用非定常实验或数值计算方法进行研究.
(2) 拖曳飞行
拖曳飞行是指多体飞行器以缆索、绳和管等连接,在大气层中进行拖曳飞行的组合体结构,当完成相关飞行任务后缆绳被解锁[45].拖曳式飞行器系统广泛地存在于航空航天工程领域,如空中加油(airto-air refueling,AAR)[46-50]系统(图5)、拖曳式可重复使用航天运载器[51]、滑翔机拖曳起飞[52]、拖曳诱饵系统(towed decoy system,TDS)[53].对处于空气介质的拖曳飞行,拖曳体会受到被拖曳体周围复杂干扰流场的影响,有必要研究拖曳体与被拖曳体间的多体空气动力学问题,为拖曳式飞行器的结构、控制和绳索等系统设计提供参考,保证拖曳体与被拖曳体的安全性和可靠性.由于空中拖曳式飞行器一般不会做快速机动飞行,多体间的空气动力多为定常的,可将多体飞行器固定不动进行风洞实验和数值模拟研究.

图5 空中硬式加油示意图Fig.5 Schematic diagram of air-to-air refueling
1.2.2 多体飞行器相互接触或组合飞行
多体飞行器相互接触或组合为一体,并保持相对静止飞行,主要场景有飞机-存储物的携带飞行,多级飞行器的助推飞行过程,这两类组合飞行器的构型多样化,有串联、并联和串并联混合构型.
(1) 飞机-存储物的携带飞行
飞机-存储物的携带(carriage)飞行是指飞行中在飞机上安装有各种存储物(store),如导弹[54],副油箱[55],无人机,运载火箭等.依据存储物与飞机的安装位置,可以分为以下几类:(1) 外部存储物(external store)是指将存储物安装在飞机的机翼上或机身外部,如图6 所示为安装在F35 战斗机机翼下方副油箱[56];(2) 紧贴存储物(tangential store)是将存储物尽可能地靠近飞机外表面;(3) 半埋存储物(semisubmerged store)是指将存储物设置在轮廓与存储物特定外形相一致的浅槽内;(4) 内埋存储物(internal store)是指将存储物全部安装在飞机内部.外部、紧贴和半埋存储物在携带飞行时均存在飞机与存储物间的相互流场干扰,流场干扰会影响飞机和存储物的气动力特性.一般情况下,存储物相对于载机来说尺寸较小,相互的流场干扰对存储物的气动特性影响较大.当飞机-存储物在携带飞行过程中不做机动动作时,多体系统间的干扰气动力为定常或静态的,当飞机-存储物在携带飞行过程中做跃升机动、俯冲机动、滚转机动等复杂机动动作时,由于飞机-存储物组合系统的飞行状态(速度、位置和姿态等)随时间快速变化,多体间流场特性呈现非定常、非线性特征,使得多体间的空气动力学问题变得更为复杂,需要采用非定常或动态实验或数值模拟进行研究.内埋存储物的携带飞行过程由于安装在飞机的内部,不存在多体间的流动和气动干扰,但内埋存储物与飞机分离时需要穿越飞机的内埋舱,存在流动与气动干扰.

图6 副油箱挂载示意图[56]Fig.6 Schematic diagram of external fuel tank on F35 combat-aircraft[56]
(2) 多级飞行器的助推飞行
多级飞行器主要有多级运载火箭(multistage rocket)[57-58]、助推高超声速飞行器(booster hypersonic vehicle)[59]、可重复使用(reusable)两级入轨空天飞行器(two-stage-to-orbit vehicle,TSTO)[60](图7),火箭助飞鱼雷(rocket-assisted torpedo,RAT) [61]等.根据多级飞行器的不同连接或布置方式可分为:(1)串联构型(tandem configuration)的多级飞行器[62-63],如革命性飞行器Hyper-X 计划中的助推器(booster)与X-43 A 飞行器[64],如图8 所示;(2) 并联构型(parallel configuration)的多级飞行器,如并联布置的兰利滑翔-返回助推器LGBB (langley glide-back booster)[65];(3) 串并联混合构型的多级飞行器,如串并联运载火箭等.多级飞行器在大气层内爬升或飞行过程中存在多体间的流场干扰,流场干扰必然会带来相应的空气动力学问题,对于不需要快速非定常或动态机动的多级飞行器,可只考虑多体间的定常气动力特性,将多级飞行器固定不动进行风洞实验和数值模拟研究.

图7 并联布置的兰利滑翔-返回助推器(LGBB) [60]Fig.7 Parallel configuration of LGBB[60]

图8 Hyper-X 计划中串联布局多级飞行器[64]Fig.8 Tandem multistage vehicle in Hyper-X program[64]
1.2.3 多体飞行器回收或解锁分离后的相对运动
如引言中所述,多体飞行器间的回收和分离主要有空中回收无人机、飞机-存储物分离、飞机-座舱盖分离,弹射救生系统分离,多级飞行器的级间分离,载人航天器发射逃逸系统的中止分离,低空整流罩分离,多薄片分离,多用途飞船的前舱盖分离,子母弹分离,流星体破碎化和太空碎片脱离轨道等等.
多体飞行器解锁分离后相对运动可提炼为多体分离动力学(multibody separation dynamics,MBSD)问题,关于多体分离动力学问题国内外学者开展了大量研究,如国内的北京航空航天大学的阎超团队[66-67]基于重叠网格技术,利用三维可压缩N-S 方程对子母弹分离过程的气动干扰问题进行数值模拟,并在抛射过程中发现激波-边界层干扰引起的分离流动.大连理工大学的刘君团队[68]对头罩分离等多体分离问题进行数值模拟.中国空气动力研究与发展中心的林敬周等[69]对高马赫数下的多体分离开展研究.北京理工大学的雷娟棉团队[70]对飞机-存储物分离安全性问题开展数值模拟研究,并获得一定的研究成果与结论.南京航空航天大学的田书玲等[71-72]基于重叠网格技术对飞机-存储物分离开展了大量的研究,并发展相关的计算软件系统.航空气动院的钱占森等[73]数值模拟了背负式两级入轨飞行器的并联级间分离问题.中国航天空气动力技术研究院的李盾等[74]、蒋增辉等[75]对多体分离问题开展数值模拟和风洞实验研究.近日,中国航天空气动力技术研究院的宋威和艾邦成[76]对飞行器多体分离动力学问题的研究进展进行全面论述,主要从各种研究方法或手段上(如基于网格法的动力学建模与仿真,时间精确的CFD 方法,准定常捕获轨迹实验,非定常风洞投放实验和飞行实验等)对多体分离动力学进展论述,但较少提及多体分离过程中的流动物理及空气动力学特性.
2 多体空气动力学及分离动力学的研究方法及技术挑战
2.1 多体空气动力学研究方法
多体飞行器在飞行和分离过程中均会产生与空气介质的相对运动,多体飞行器与孤立体飞行器的流动控制方程并无本质上的区别,其主控流动方程仍为N-S 方程,多体空气动力学的研究方法与孤立体空气动力学基本一致,主要有理论分析(theoretical analysis,TA)、数值计算方法(computational fluid dynamics,CFD)、风洞实验(wind tunnel testing,WTT) 和飞行实验(flight testing)[77]等研究手段.(1)理论分析是建立简化流动数学模型,并在一定的假设下,求得多体间的气动力简化解[78].理论分析方法有细长体理论(slender body theory,SBT)[79-80]、面元法(panel method,PM)[81-82]、涡格法(vortex lattice method,VLM)[83]和影响函数法(influence function method,IFM)[84-85]等,理论分析方法主要针对线化小扰动位势方程来说的.(2) CFD 方法是基于相关的网格技术求解无黏Euler 或有黏的N-S 方程,湍流模拟主要有直接数值模拟(direct numerical simulation,DNS)、雷诺平均法(reynolds-averaged Navier-Stokes,RANS)、大涡模拟(large-eddy simulation,LES)、脱体涡模拟(detached-eddy simulation,DES)等.(3) 风洞实验是指在风洞中安置一定的缩比模型,研究气体运动与模型相互作用规律,主要有静态和动态气动力测量(static and dynamic force measurement)、静态和动态压力测量(static and dynamic pressure measurement)、基于粒子图像测速(particle image velocimetry,PIV)和探针的流场测量技术及相关的流动显示(flow visualization,FV) 技术(如油流、纹影和阴影法等) 可视化流场结构等等.
随着多体飞行器气动布局复杂化和多样化,采用多种研究方法预测多体空气动力学问题成为必然.各种预测方法间的关系如图9 所示.理论分析和数值模拟可以进行对比研究,用于比较不同流动控制方程所带来的差异性,数值模拟工作可以用于指导风洞实验和飞行实验工作 (如实验方案设计、实验状态等),风洞实验可以用来验证数值模拟计算模型和理论模型的正确性,飞行实验可以用于验证理论分析、数值模拟和风洞实验结果的正确性.

图9 多体空气动力学研究方法的相互关系图Fig.9 Relationship of research methods for multibody aerodynamics
2.2 多体分离动力学研究方法
多体分离动力学的研究方法包括:(1) 网格测量法(grid survey method,GSM),通过理论分析、数值模拟或风洞实验中所获得的多体在不同位置和姿态角下的静动态气动力,并代入六自由度运动方程进行仿真(dynamic modelling and simulation,DMS)可获得多体分离动力学特性,是多体分离动力学的间接预测方法[76],如图10 所示为网格测量法预测多体分离动力学结构图.(2) 准定常的捕获轨迹实验(captive trajectory system testing,CTS)或时间精确(time-accurate)的CFD 方法,风洞CTS 实验通过时间平均气动力测量和飞行动力学方程的实时解算,并反馈控制模型的实时运动,不仅可获得多体分离间的空气动力参数,且可以给出多体的运动学参数,是多体分离动力学问题的直接实验预测方法[76].时间精确的CFD 方法与风洞CTS 实验类似,只不过是在数学模型中计算气动力并代入飞行动力学方程仿真计算,并实时改变分离体的网格位置.(3) 非定常的风洞投放(drop testing) 和自由飞(free flight testing)实验,该方法可直接获得多体间的运动学参数,该方法是多体分离动力学的直接实验预测方法[76],可建立一定的气动力数学模型并采用参数辨识技术获得多体间的空气动力学特性(运动到动力的反问题).关于飞行器多体分离动力学问题请详见文献[76].
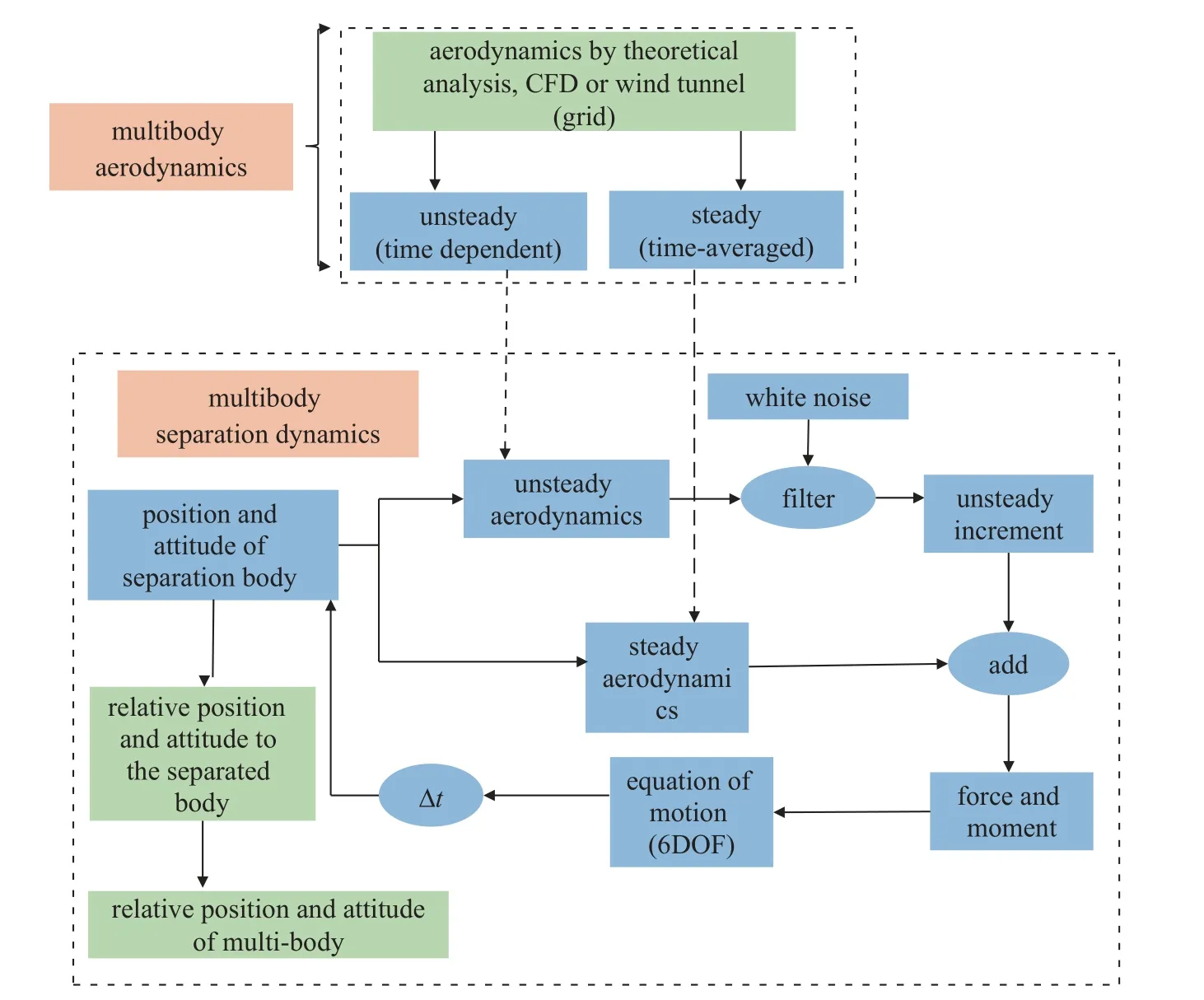
图10 网格测量法预测多体分离动力学结构图Fig.10 Schematic diagram of predicting the multibody separation dynamics by GSM
2.3 多体空气动力学模拟难点和挑战
多体飞行器在飞行、回收或解锁分离过程中均存在流动和气动干扰,其具有不同于孤立体飞行器的流动特征,如超声速时存在复杂的激波与激波干扰、激波与边界层干扰、激波衍射与反射,分离点不确定、激波与旋涡干扰等非定常流动现象,严重影响着多体飞行器间的空气动力学特性,使得多体空气动力学的准确预测和评估成为多体飞行器领域的主要技术难点.
尽管当多体飞行器处于相对静止的飞行过程中,想要准确地模拟多体飞行器间的流动也面临较大困难与挑战,多体分离时的流场干扰是动态干扰,由于分离体的姿态和位置时刻变化,运载体上流场在分离体上的流动干扰是时刻变化的,再加上分离体自身的流场影响,使得多体分离时的空气动力学和分离动力学的精确预测更为困难.
理论分析方法具有普遍性信息,由于作出大量的简化假设,理论模型只能反映事物的核心特征,对复杂的多体飞行器空气动力学问题,该方法常常会受到限制[78],由于多体间存在复杂的激波与激波反射和衍射,使得多体飞行器的简化模型不易实现,有时甚至得不到想要的结果[86].多体飞行器间的空气动力学与孤立体空气动力学本质上并无较大差异,均是求解N-S 方程,CFD 方法在解决多体间的空气动力学问题依然面临着与孤立体飞行器空气动力学同样的困难与挑战,如不易给出准确的湍流模型,转捩点的预测精度不高,分离点预测不准等难点,但多体间的流动存在相互干扰和作用,使得精确地预测其流动信息将会更加困难,且会增加计算量.多体空气动力学的风洞实验研究依然面临着缩比模型带来的雷诺数影响及尺度效应、支架干扰、洞壁干扰、模型本身的模拟偏差等问题,这些问题不管是在多体飞行器,还是在孤立体飞行器均是不可避免的.如尺度效应会引起试验雷诺数和飞行雷诺数的差异,造成两者湍流度不同,风洞模型与试验模型的绕流,边界层转捩点和分离点有较大差异,从而影响其气动特性.在研究多体飞行器的非定常气动力时,当采用动态风洞试验(如自由振动、强迫振动)时,由于多体间距离较近,无法使分离体在其附近进行自由振动,可能会碰撞运载体,从而无法获得相距较近时的动态气动力,而恰恰相距较近时的动态气动力对多体分离动力学影响最严重,这成为动态风洞试验技术的一大挑战,有时不可能实现.
2.4 多体空气动力学与多体分离动力学及安全性关系
当多体飞行器处于相对静止的飞行过程中(编队飞行、拖曳飞行等),其复杂的空气动力学特性会影响飞行器的舵面控制效率,给多体飞行器控制系统带来挑战和困难.在多体飞行器回收或解锁分离后的相对运动过程中,有时发现在多体相对运动过程中,分离体会出现俯仰抬头,尾部翘起,甚至发生碰撞载机等现象,导致分离失败.多体间的空气动力学研究对预测多体回收或分离后的动力学特性尤为重要,如图11 所示为多体空气动力学与多体分离动力学及安全性的关系图.多体间的空气动力学是多体分离动力学模拟的基础,由于分离体所处运载体扰动流场区域的位置和姿态是变化的,不能像研究静态空气动力学问题那样,将分离体固定在干扰流场的某个位置进行数值模拟或风洞实验给出干扰气动力,这就需要给出载机流场干扰全区域的气动力数据库,从而可利用气动力数据库耦合刚体运动方程来预测与评估分离体的动力学特性[76].
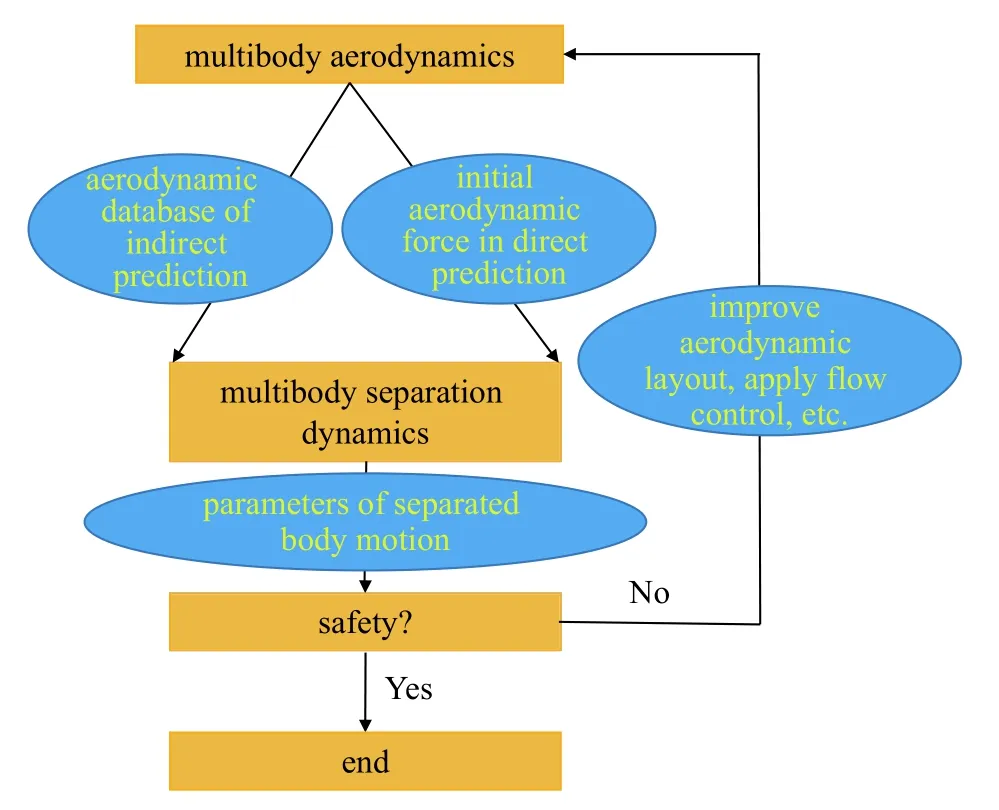
图11 多体空气动力学与多体分离动力学及安全性的相互关系图Fig.11 Relationship of multibody aerodynamics,separation dynamics and safety
多体分离的安全性评估是建立在多体分离动力学的准确模拟基础上来判定的,多体分离安全性是一个不断迭代和优化的过程,当分离体与运载体间的分离不安全时,需要采用一定措施进行改进和完善 (如改变分离体气动布局、施加流动控制等).三者之间的关系见图10 所示.
3 典型串联多体构型气动特性和流动物理
串联构型被广泛地应用在多级飞行器上,如串联式多级运载火箭(multistage launch vehicle),助推滑翔导弹(boost-glide missile)等.研究表明,级间纵向错开间距 ∆x(上面级的后端与下面级的前端的间距)和相对级间夹角 ∆θ 是影响串联构型飞行器流动结构的重要参数[87-88],国内外学者大多数通过改变纵向间距来观察多体间的流动结构变化.当纵向间距为 ∆x=0 时,对应着串联构型多级飞行器的助推飞行状态,当纵向间距 ∆x>0,对应着级间分离状态.
依据分离冲量的来源,串联构型级间分离主要有冷分离(cold stage separation,CSS)和热分离(hot stage separation,HSS)两种方式[89].冷分离是级间段解锁后由冲量装置(如反推火箭(retro-rocket)、弹簧与作动筒等)提供冲量实现两级分离,多级飞行器在分离过程中存在相互流场干扰,进而会影响两级飞行器的气动特性,冷分离时仅受外流的影响[90-93].热分离是在上面级(upper stage)发动机点火后,级间段才解锁,下面级(lower stage)在上面级发动机喷流作用下实现分离.喷流与下面级顶端碰撞形成复杂的冲击流场,在冲击流场中同时存在亚声速与超声速区域,存在复杂激波-膨胀波系,以及激波相互干涉和激波与边界层间的交互作用.在级间段羽流冲击形成的局部高压会导致沿上面级向上游方向的逆压梯度的产生,进而诱导上面级尾部壁面发生流动分离现象,也被称为羽流诱导流动分离(plume-induced flow separation).热级间分离最典型的流动特征是存在上面级发动机的羽流干扰,羽流与外流的相互耦合作用,产生复杂的流动结构(图12 所示),内外流动产生的侧向干扰可能导致导弹姿态运动出现较大幅度的波动,对分离安全性与飞行稳定性产生严重影响[94-97].
图12 热分离时级间段的流动结构[97]Fig.12 Flow structure of interstage during HSS[97]
从检索的文献(表1)看串联多体构型的气动外形种类繁多,不同气动外形的串联多级飞行器的流场和干扰特性是不同的,本文选择革命性飞行器Hyper-X 计划中的助推器(booster)与X-43 A 飞行器(级间冷分离)和斜坡-钝头锥(级间热分离)的级间分离气动特性及流动物理进行阐述.
表1 串联多体构型级间分离的研究概要(检索)Table 1 Summary of stage separation for tandem multibody configuration (retrieved)
3.1 助推器与X43 A 飞行器
图13 为Hyper-X 计划中的X43 A 飞行器示意图[90],X43 A 为升力体布局(lifting body configuration),Hyper-X 计划目标是演示和验证机身集成氢燃料双模燃烧超燃冲压发动机推进系统高超声速飞机设计和性能预测技术、风洞实验技术和数值计算方法,X43 A 飞行器与助推器的级间分离是关键技术问题.

图13 X43 A 升力体飞行器示意图[90]Fig.13 Schematic diagram of X43 A lifting body vehicle[90]
图14 为不同轴向距离对X43 飞行器俯仰力矩系数的影响曲线,其中α为助推器迎角,∆x为X43飞行器与助推器的轴向间距,∆ θ 为两级飞行器的相对俯仰角(头部向下为负值).最大的气动干扰力发生在轴向距离 ∆x=−0.75 ft 处,俯仰力矩系数随着轴向距离增大而逐渐减小.从图14(a)中可看出在无干扰(圆圈表示)情况下,俯仰力矩系数均为抬头的,这表明两级飞行器间的干扰能显著地改变多体间的气动力特性(图14(b)所示).
图14 助推器与X43 A 飞行器间干扰气动力特性[91]Fig.14 Aerodynamic interference characteristics between booster and X43 A vehicle[91]
图15 为助推器与X43 A 飞行器间的流场干扰纹影图[91],从图15 中可看出,两级飞行器间的流动结构较为复杂,典型的流动特征是激波与激波干扰,前体激波对后体影响较大,X43 A 飞行器上的唇口处激波作用在助推器前端.当助推器与X43 A 飞行器间的轴向距离较小时,间隙中产出分离流动,卷起旋涡反作用在X43 A 飞行器的后部区域(图15(b)和15(c)).从图15(b)可看出在助推器前端和X43 A飞行器后端存在复杂的流动结构,在垂直翼前面可观察到一个明显的分离激波.
图15 助推器与X43 A 飞行器间的流场干扰纹影图[91]Fig.15 Schlieren diagram of flowfield interference between booster and X43 vehicle[91]
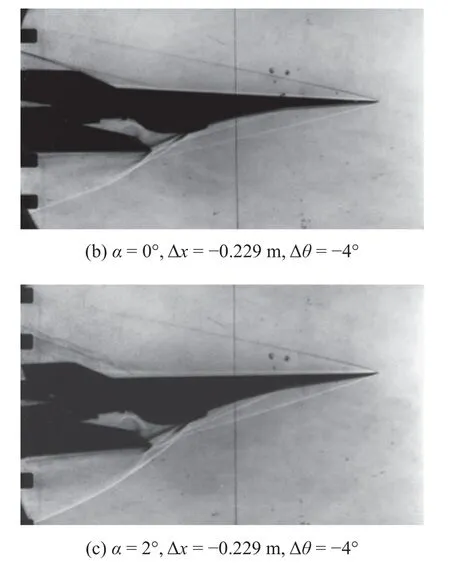
图15 助推器与X43 A 飞行器间的流场干扰纹影图[91](续)Fig.15 Schlieren diagram of flowfield interference between booster and X43 vehicle[91] (continued)
3.2 斜坡-钝头锥
Lungu 等[95]在高速风洞中采用纹影法显示了两级飞行器级间段的羽流干扰流场结构(自由流马赫数为2.5),实验过程中采用斜坡(ramp)模拟导弹或火箭的下面级,上面级采用钝锥体(blunt cone),钝锥体内部可喷出气流用于模拟羽流(喷口马赫数为1).图16为有无羽流干扰时的流动结构,典型的流动结构包括斜坡台阶边缘的斜激波和级间段内的剪切层结构,然后在斜坡台阶上分叉成两个分支,其中一个与斜坡平面平行,另一个在斜激波下面.当有羽流时,斜坡台阶处的斜激波较强,上面级的射流引入增加了级间段的剪切层厚度.
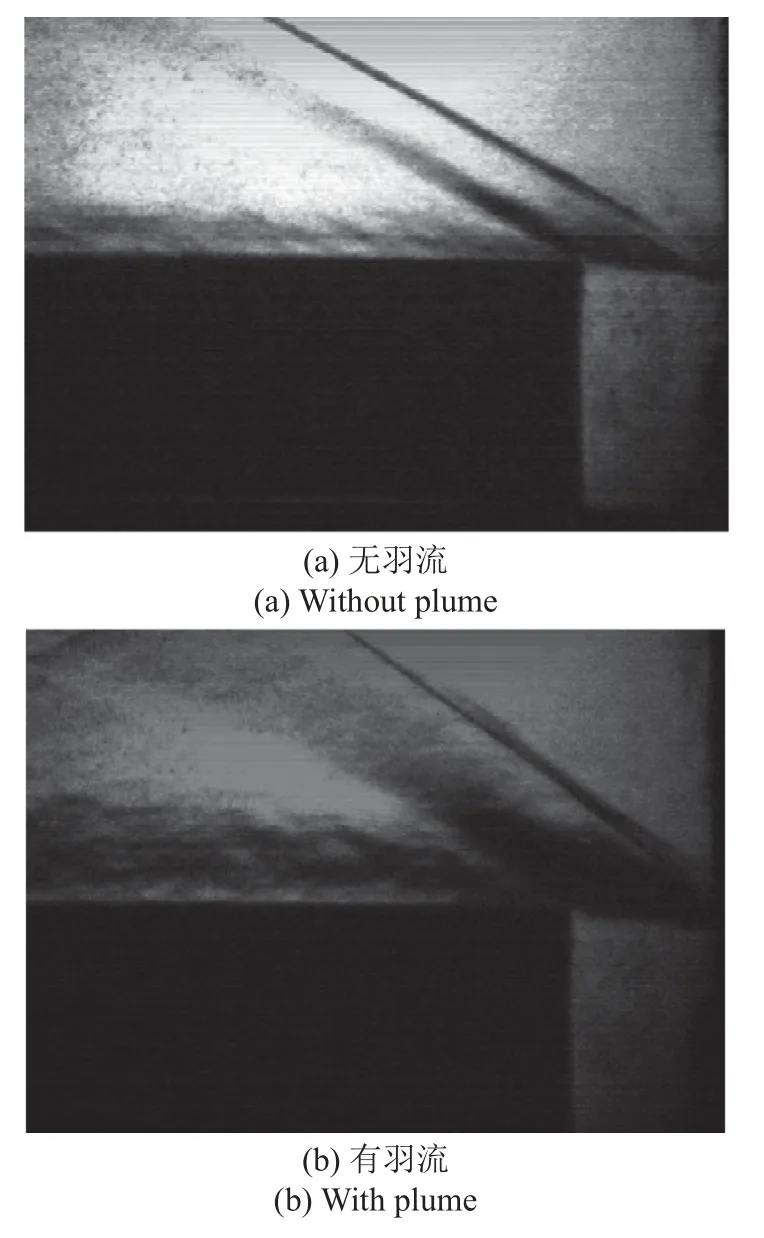
图16 有无羽流干扰时的流场结构[95]Fig.16 Flowfield structure with or without plume interference[95]
Lungu 等[95]用纹影法显示了四种间距(∆x/D分别为0.5,1,2,3)对流场结构的影响,如图17 所示,可看出随着两级间的轴向间距的增加,斜激波的角度变小,激波强度减弱,来自上面级羽流的激波与剪切层出现交叉现象,上面级的第二个剪切层随着分离距离的增加而减小.
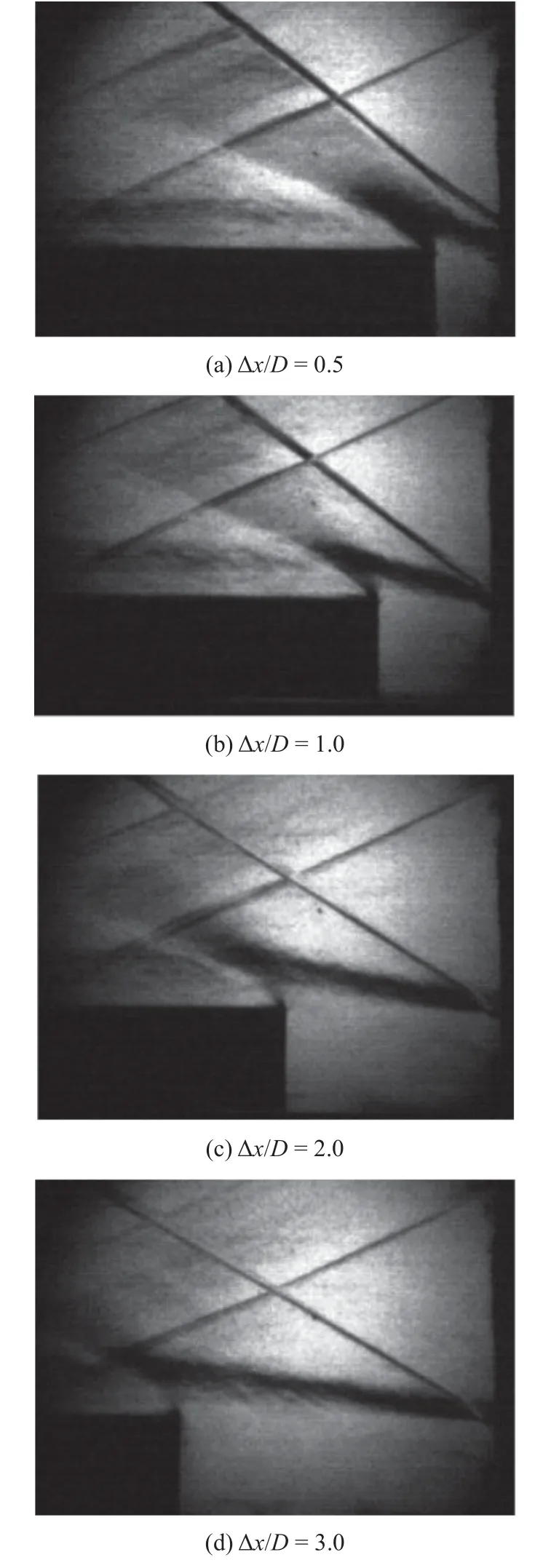
图17 不同轴向间距下的阴影图[95]Fig.17 Shadowgraph in different axial distance[95]
4 典型并联多体构型的气动特性及流动机理
并联构型是指多体飞行器横航向排列的布局形式,并联构型多体飞行器较为广泛,主要集中在以下几种:(1) 用于研究飞机-存储物(aircraft-store)携带飞行和分离时的流动和气动干扰构型,如平板/楔形板-存储物(flat plate and store,FPS)[98-115]并联构型、机翼-存储物(wing-store,WS)[116-117]并联构型、空腔-存储物(cavity and store)[118-134]并联构型;(2) 用于研究并联构型多级飞行器的助推飞行和分离时流动和气动干扰的构型,如两相同细长旋成体(slender body of revolution,SBR)[32-39,135-139]并联构型、两翼身组合体(wing-body,WB)[140-145]并联构型、助推器(booster)与航天飞机(space shuttle)[146-149]、助推器与芯级构型[150-151]、BETA 构型[152]、ELAC 和EOS 轨道级[153]、助推器和载人轨道器[154]、国内的TSTO 飞行器[94]、其他并联构型(如三角形、正方形和圆形截面的助推器和圆柱体轨道器)[155-156].研究表明,并联构型的多体飞行器在飞行和分离时均存在流场干扰,流场干扰必定影响着并联多体的气动力特性.
4.1 飞机-存储物的典型并联构型
4.1.1 平板/楔形板/翼-外部存储物
表2 为国内外学者研究平板/楔形板/翼-存储物并联多体构型的概况.从表2 中可看出国内外学者在研究飞机-外部储存物的气动特性和流动机理时主要选择平板/楔形板-尖拱圆柱体构型,最典型流动特征是激波与边界层相互作用(shock-wave boundary-layer interactions,SWBLI).在实际问题中经常会发生复杂三维激波和边界层相互作用,如飞机与外部存储物分离时飞机头部激波撞击外部存储物,为简化研究激波与边界层相互作用的流动机理,经常将三维激波(three-dimensional shock-wave,3D-SW)简化为二维激波(two-dimensional shock-wave,2DSW)开展研究[100-104].1983—1985 年间,国外学者Brosh 等[99-101]在马赫数Ma=3.0 的来流条件下,采用静态压力测量和油流显示方法对具有三种不同楔角的二维楔形板和尖拱圆柱体存储物(图18)的流动干扰机理开展研究,楔形板被安置在风洞上表面,并产生入射激波作用在尖拱圆柱体的上表面(windward side,ϕ=0◦).文献[100]将圆柱体周围的流场分为四个不同区域:(a) 迎风区(windward region),入射激波冲击区域,流动主要由冲击激波所引起的严重压力梯度(pressure gradients)和剪切应力(shear stresses)主导;(b) 背风区(leeward region),该区域流动出现大面积分离,主要由横向流动(cross flow) 和边界层增厚主导;(c) 上游区(upstream region),在冲击激波前,流动未受激波干扰;(d) 下游区(downstream region),处于楔形扇形膨胀波后面,背风和迎风区域边界层厚度差异仍造成部分横向流动.楔形板顶端产生的激波在圆柱体近端诱导较大的逆向压力梯度,使模型表面局部压力明显升高,从而导致近侧的激波诱导边界层分离区.该分离区域对迎面的近侧气流起到阻碍作用,并在第一个分离泡(separation bubble)的上游产生第二个分离泡,如图19(b)和图19(c)所示.当楔形板与尖拱圆柱体的横向距离为零时,冲击激波强度最弱,圆柱体的分离气泡尺寸较小,二次分离线被打破(图19(a));当横向距离由6.5 cm 增加到8.0 cm 时,激波冲击逐渐增强,气泡的大小不断增大,给边界层注入大的障碍,二次分离线变得完整(图19(b)),最后分离气泡成为一个足够大的障碍,可以将结点Nr1从二次分离线S2中分离出来(图19(c)).

图18 二维楔形板和尖拱圆柱体的简化模型[100]Fig.18 Simplified model of two-dimensional wedge-plate and ogive-cylinder[100]

图19 不同横向距离对圆柱体表面流动分离的影响[100]Fig.19 Influence of different distance on flow separation on cylinder surface[100]
1983 年,Hung[102]采用数值计算方法研究类似尖拱圆柱体与二维激波相互作用构型.Hung 的许多发现与文献[100]相似,观察到圆柱体两侧大面积的复杂分离流动.他发现,在圆柱体的近侧,层流与湍流间没有较大区别.Newman 等[104]指出,对于无舵翼的圆柱体,当它穿过二维楔形体的扰动激波时,轴向力干扰比较严重,这种变化能显著地影响外部存储物的分离运动.
随着风洞实验和流动显示及数值模拟技术的发展,各种先进表面压力测量(如压敏漆PSP 技术[112])和表面速度测量技术(如PIV[113])被用于研究三维激波与边界层相互作用问题,并取得相关的研究成果.文献[114-115]报道了三维激波与平面轴对称边界层相互作用导致的高度复杂的分离流.
4.1.2 空腔-内部存储物
当存储物被安装在飞机内部时(如新一代先进战斗机的内埋武器),该飞机-存储物多体构型可被提炼为空腔-内部存储物模型[79],如图20 所示.Malmuth[79]将内埋存储物分离过程分为三个阶段:(1) 存储物在空腔内部运动阶段;(2) 存储物穿越空腔口剪切层阶段;(3) 存储物在空腔外的运动阶段.
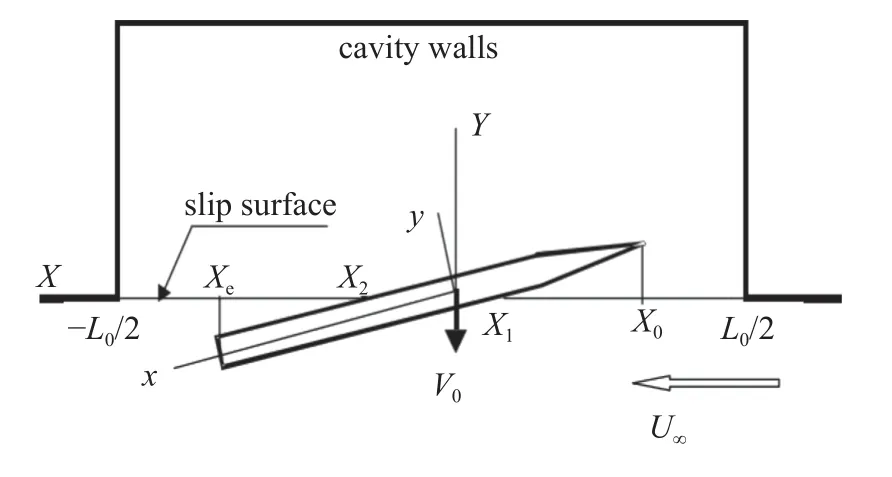
图20 空腔-存储物干扰的简化模型[79]Fig.20 Simplified model of cavity-store interference[79]
空腔流动是流体力学的经典问题,依据不同的空腔长深比,空腔流动可划分为开式空腔流动(open cavity flow)、过渡空腔流动(transitional cavity flow)和闭式空腔流动(close cavity flow),空腔流动往往伴随着来流边界层的分离与再附、剪切层不稳定、舱内旋涡流的发展与破裂等复杂非定常流动[118-119].对超声速流动来说,空腔内外还存在激波与激波间的相互干扰、剪切层与激波干扰、激波与旋涡干扰等非定常的流动现象,这些复杂流动带来的内埋武器表面压力不均匀和不确定性会导致作用在武器上的气动力和力矩的不确定性[120-127],使得内埋武器机弹分离的运动轨迹和姿态角具有可变性[128].关于空腔-存储物分离的流动和气动干扰问题的评述可详见文献[129].
中国航天空气动力技术研究院的多体分离研究团队近年来在内埋武器机弹分离的干扰特性方面取得了一些研究成果[130-134].董金刚等[130-131]和宋威等[132-134]等分别采用风洞CTS 和投放实验方法研究了内埋武器与载机的气动干扰和分离特性,并探讨了初始分离角速度、分离高度、攻角、有无折叠尾舵等参数对机弹分离干扰特性的影响.实验模型和条件均相同,模型为类F22 战斗机模型(图21(a))和AIM-120 C 空空导弹的简化模型(图21(b)).风洞CTS 和投放实验的结果均表明,在超声速飞行条件下,内埋弹舱布局战斗机存在复杂的激波系结构,存在激波与激波干扰等非定常流动现象,这些复杂的流动结构会对导弹产生较强的气动干扰效应,导弹出现“抬头”俯仰运动趋势,如图22 所示.
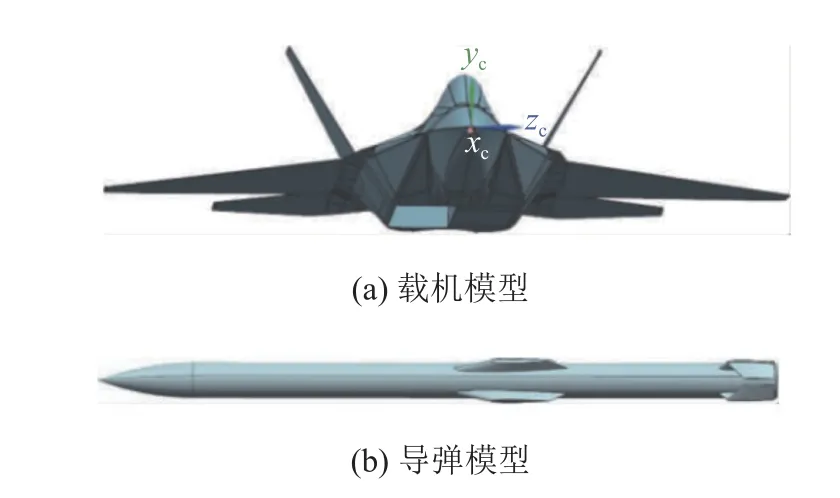
图21 风洞实验模型[130]Fig.21 Wind tunnel model[130]
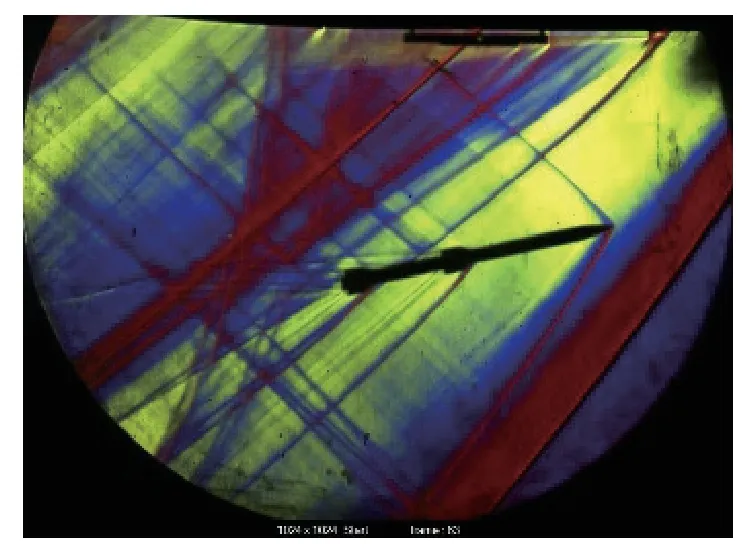
图22 典型的风洞纹影图Fig.22 Schlieren of wind tunnel
针对内埋武器机弹分离过程中出现俯仰抬头现象,宋威和艾邦成[134]通过在武器舱的前缘布置锯齿和平顶扰流板,对机弹分离进行流动控制风洞实验研究,并详细分析了有无流动控制装置时的载机附近流动结构(图23),宋威和艾邦成[134]将无流动控制装置时的流场结构分为典型的几个区域,主要有:(1) 载机激波区I;(2) 舱口剪切层区II;(3) 舱内反射激波区III;(4) 载机激波I 在风洞底部的反射激波区IV;(5) 前缘气流膨胀区V,如图23(a)所示.当内埋武器舱前缘布置扰流板时,会在载机激波区I 和舱内反射激波区III 间的气流扇形膨胀区域产生扰流激波VI (图23(b)).结果发现该扰流激波所产生的高压作用在导弹头部能起到减小抬头俯仰力矩的效果,对机弹分离俯仰方向运动产生较大影响,但对导弹垂直位移的影响并不大.
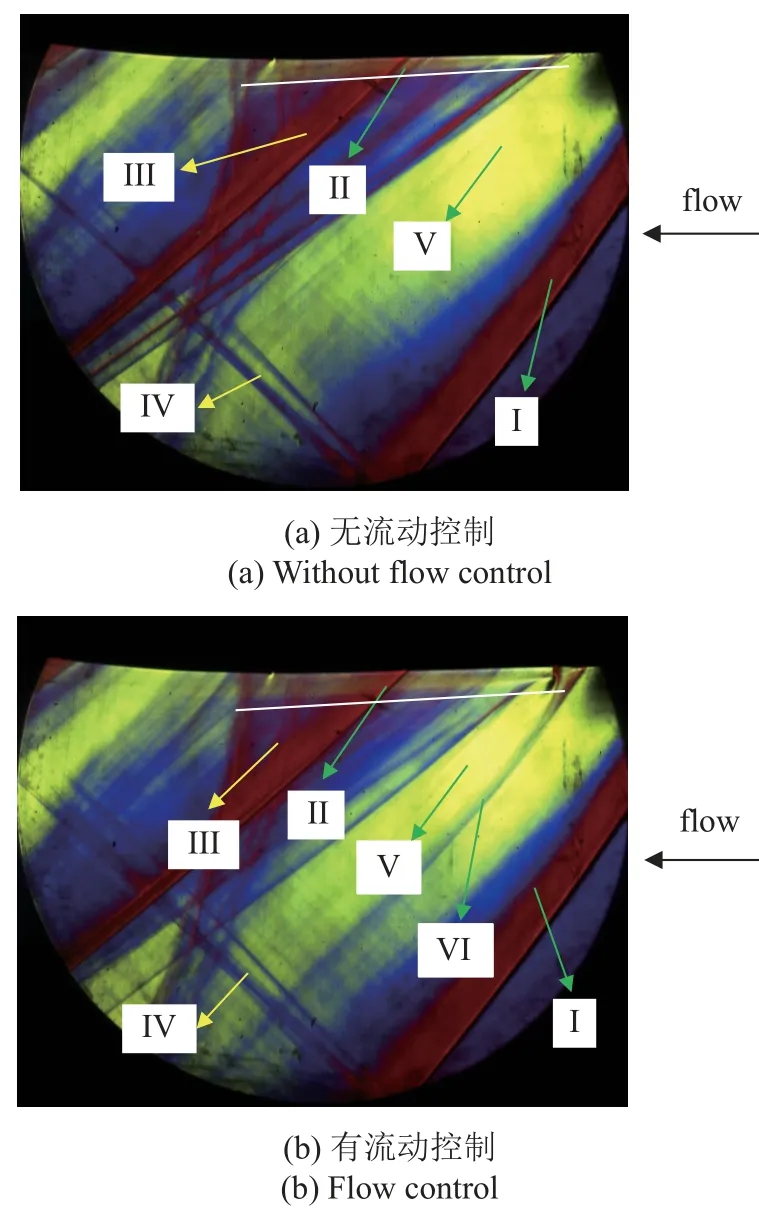
图23 典型的流动结构[134]Fig.23 Typical flow structure[134]
4.2 多级飞行器的典型并联构型
4.2.1 两细长旋成体
国内外的研究表明,对两细长旋成体并联多体构型来说,并联体间的矢径∆r(包括纵向间距∆x、航向间距∆y和横向间距∆z)和并联体间的方位角Φ(包括相对俯仰角∆θ、相对偏航角∆ ψ 和相对滚转角 ∆ ϕ)是影响细长旋成体布局飞行器的相互流场结构的重要参数[32].国内外学者大多数通过改变这几个参数来观察流动结构的变化.由于外形的对称性可只考虑纵向平面,对于细长旋成体当横向间距为 ∆z=D(D为细长体最大直径)时,对应着并联构型多体飞行器的连接飞行状态,当横向间距 ∆z>D,对应着并联构型飞行器分离状态或无接触飞行状态.
表3 为近二十年关于两细长体并联多体构型的研究概要.从表3 中可看出国内外学者在细长旋成体并联构型的研究对象和研究手段的选择上也是多样化的,不同的气动外形会存在不同的流动结构和气动力特性,最主要用于研究三维激波与边界层相互作用(three-dimensional shock wave and boundary layer interaction,3D-SWBLI) [32-36,136-137],更接近于实际上的工程应用问题.如2011 年,Mowatt 和Skews[136]采用风洞实验 (纹影和油流流动显示) 和CFDRANS (K-Omega 湍流模型) 两种方法对细长旋成体上的三维弯曲激波与细长体上三维弯曲边界层相互作用问题进行非常详细地研究,选择尖拱形圆柱体(ogive-cylinder,OC)、圆锥头柱体(cone-cylinder,CC)和半球头柱体(hemispherical-cylinder,HSC)三种研究对象,分别如图24~ 图26 所示.

表3 近二十年关于两细长体并联多体构型研究概要Table 3 Summary of two slender bodies in recent twenty years
从图24~图26 的对比可看出风洞实验结果和数值模拟结果吻合良好,并具有SWBLI 的所有基本流动特征.从图24 可看出激波与激波间为弱相互作用,无明显边界层分离 (无类似的马蹄区域),即弱入射激波不会导致流动边界层分离.但对于圆锥头圆柱体(图25)和半球头(图26)的圆柱体来说,激波与激波间为强相互作用,两种风洞实验模型中均产生了边界层分离流动,即强入射激波可导致边界层分离(即有明显的马蹄区域),在这两种情况下,马蹄形和分离区域垂直平面对称性都很明显,分离区域围绕圆柱体轨迹也很明显.
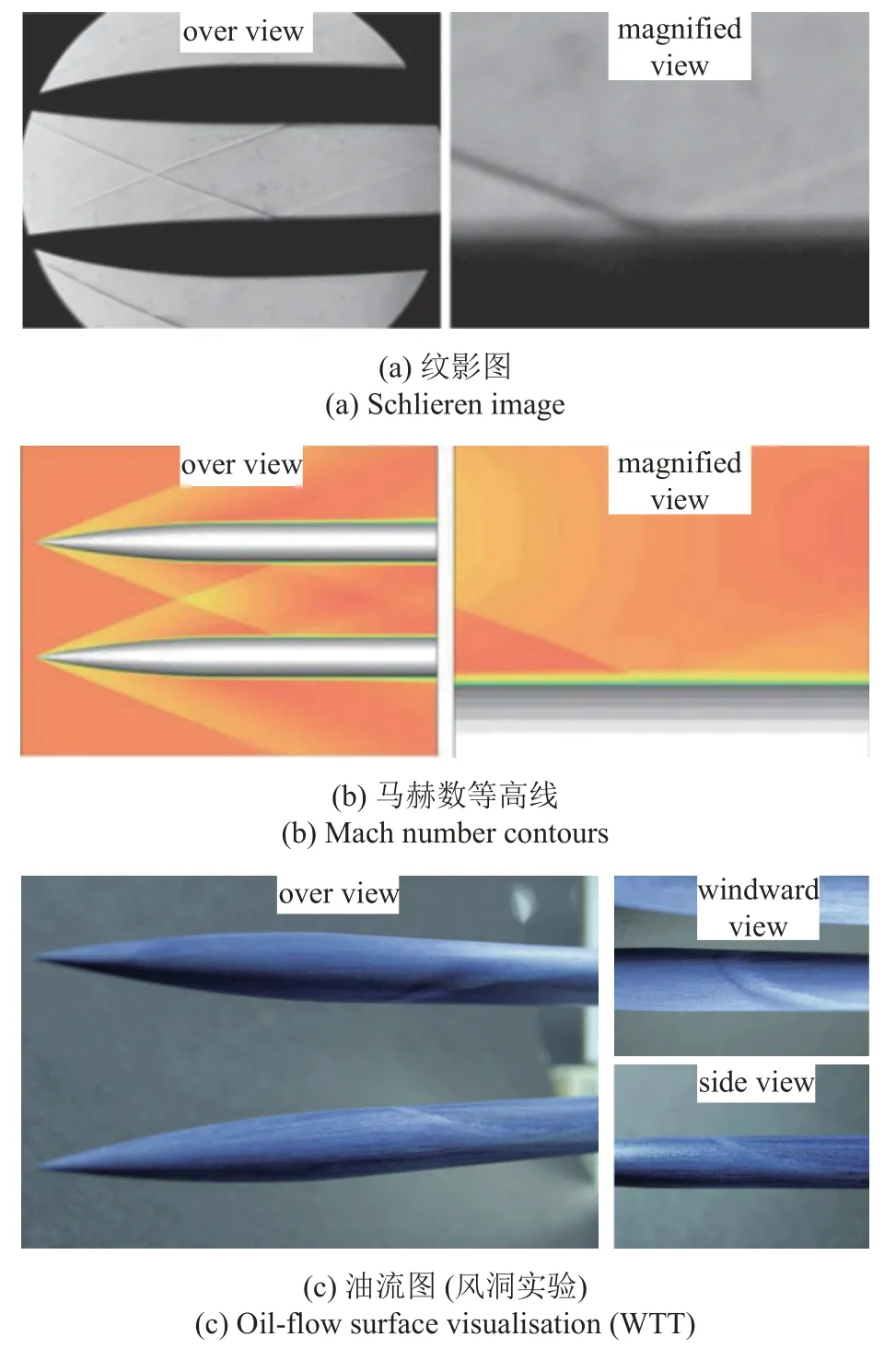
图24 尖拱圆柱体上的三维激波与边界层相互作用[136]Fig.24 SWBLI on ogive-cylinder surface[136]
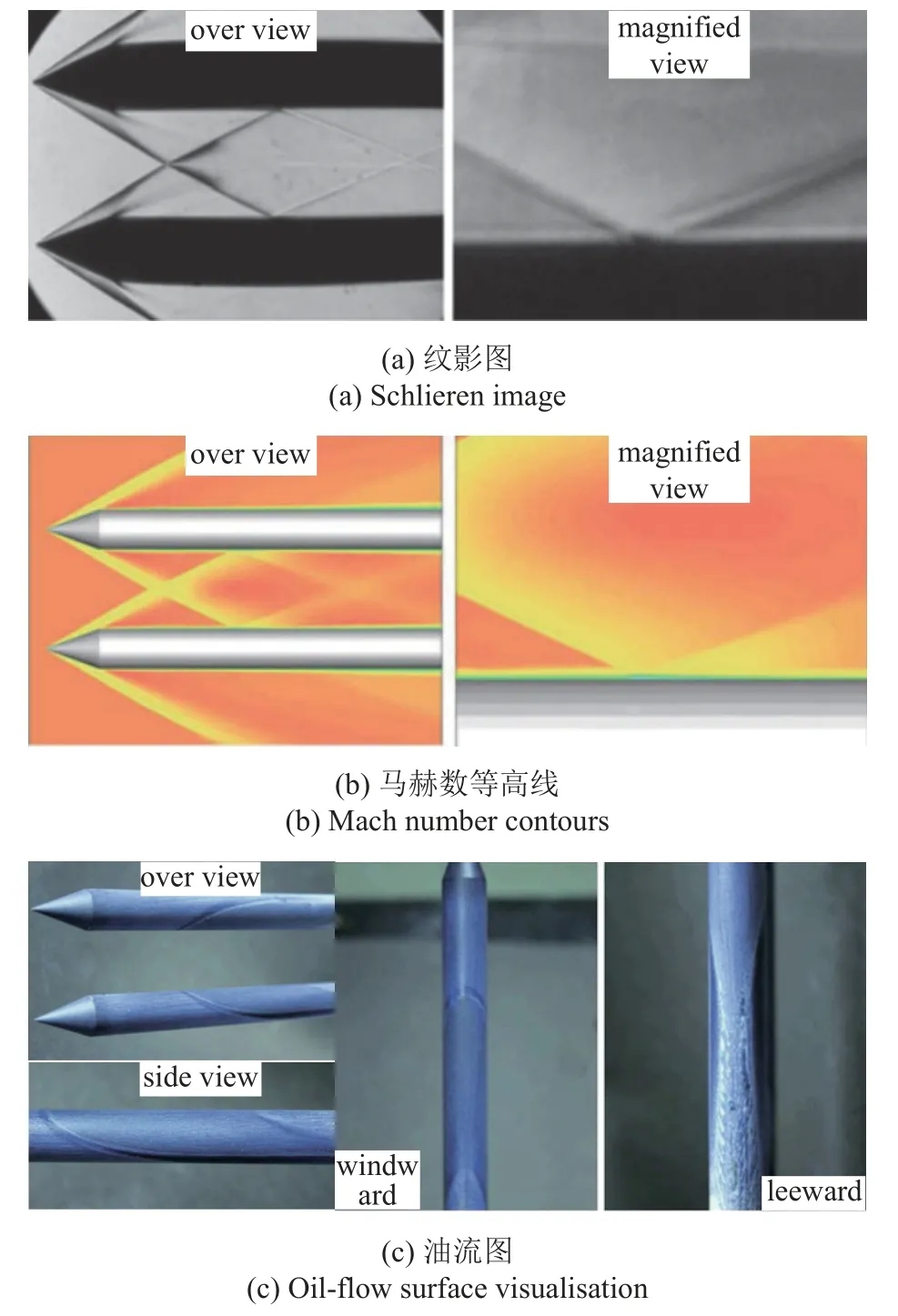
图25 圆锥头柱体上的三维激波与边界层相互作用[136]Fig.25 SWBLI on cone-cylinder surface[136]

图26 半球头圆柱体上的三维激波与边界层相互作用[136]Fig.26 SWBLI on hemispherical-cylinder surface[136]
从半球头圆柱体上的油流图(图26(c))中可清晰地看见两条明显边界层流动分离线,与Brosh 等[101]的研究结果较为吻合(除了沿着圆柱背风面长度方向的持续分离外),这种差异主要是由于Brosh 等[101]在研究中使用的楔形物凸角处存在较大的膨胀波扇形区域,膨胀波使气流变直,导致流动边界层分离线消失.分离区域的弯曲形状是由于入射激波冲击圆柱体表面形成的,在涉及其他类似几何形状[115,138-139]的工作中也观察到类似形状的分离区域.在ϕ=0◦ 子午线上,分离气泡的轴垂直于圆柱轴方向,穿过圆柱体的跨度后,被分离的区域开始弯曲,并最终与圆柱体的 ϕ=90◦子午线处的自由流的方向平行.由于入射激波的圆锥形性质和圆柱体表面曲率的影响,分离区域随着子午线角增大而减小,最终在ϕ=135◦子午线角附近消失.这结果与Panov[139]、Gai 和Teh[115]的结果相吻合,它们产生一个分离气泡,其尺寸随着沿板的跨度位置的增大而减小,这种表面流动模式也与文献[101,138]的工作有很多共同之处.
对圆锥头圆柱体(图25(a)) 和半球头圆柱体(图26(a))的纹影图像进一步分析表明,圆锥头圆柱体上的SWBLI 产生的分离激波是一种明显的激波,而对于半球头圆柱体情况,SWBLI 对上游的显著影响产生一系列压缩波,并最终合并成激波,Gai 和Teh[115]的研究也发现了类似的结果,其中SWBLI反射激波由多个压缩波合成组成.
4.2.2 两翼身组合体
可重复使用航天运载器(reusable launch vehicle,RLV)是降低航天运输成本的有效手段,是未来航天发展的必然趋势.为满足快速部署小载荷、大幅降低发射成本、提高可靠性和可维护性的要求,在NASA 的空间发射倡议计划(space launch initiative,SLI)和下一代运载器技术(next generation launch vehicle technologies,NGLT)支持下,兰利研究中心对小型运载器(small launch vehicle,SLV)相关技术开展了研究,提出名为 LGBB (Langley glide back booster)的滑翔返回助推器,当助推器和轨道器具有相同外形的称为Bimese-LGBB 飞行器,如图8 所示.该并联多体飞行器的级间分离是关键技术问题,美国很多研究机构针对该外形飞行器开展大量的风洞实验和数值模拟研究(见表4 所示).

表4 LGBB 并联构型的研究概要Table 4 Summary of LGBB parallel configuration
图27 为不同横向间距(∆z/Lref=0,0.05,0.1,0.15,Lref为参考长度)干扰下轨道器和孤立体的法向力和俯仰力矩系数对比图,横向坐标为攻角 α (单位:度),图中包含LGBB 孤立体的风洞实验数据和测量不确定度估计值.从图27(a)可看出,多体干扰下的助推器的法向力随攻角变化的斜率与全攻角范围内的孤立体飞行器斜率相似,但在数值上有些差异.轨道器和助推器在前三个横向间距下的俯仰方向是静态稳定的,在最远的 ∆z/Lref=0.15 位置时俯仰静稳定性减弱.图28 为不同横向间距时的纹影结构图,清晰地可见两体的间隙间存在激波反射、衍射和相互干扰等复杂的流动现象.
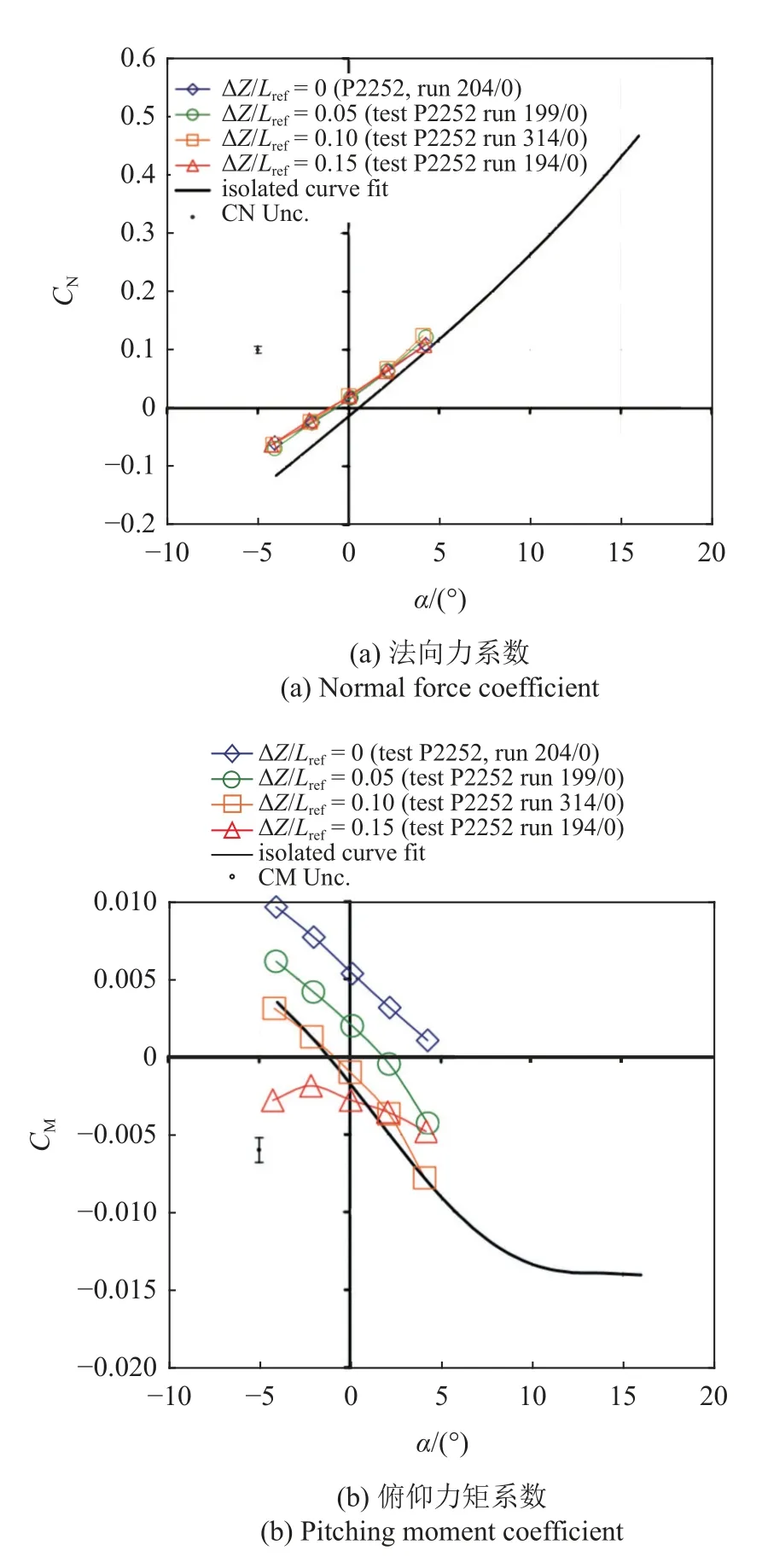
图27 近体和孤立体法向力和俯仰力矩系数随攻角变化[140]Fig.27 Diagram of normal force and pitching moment coefficient vs.angle-of-attack of near-body and isolated body[140]
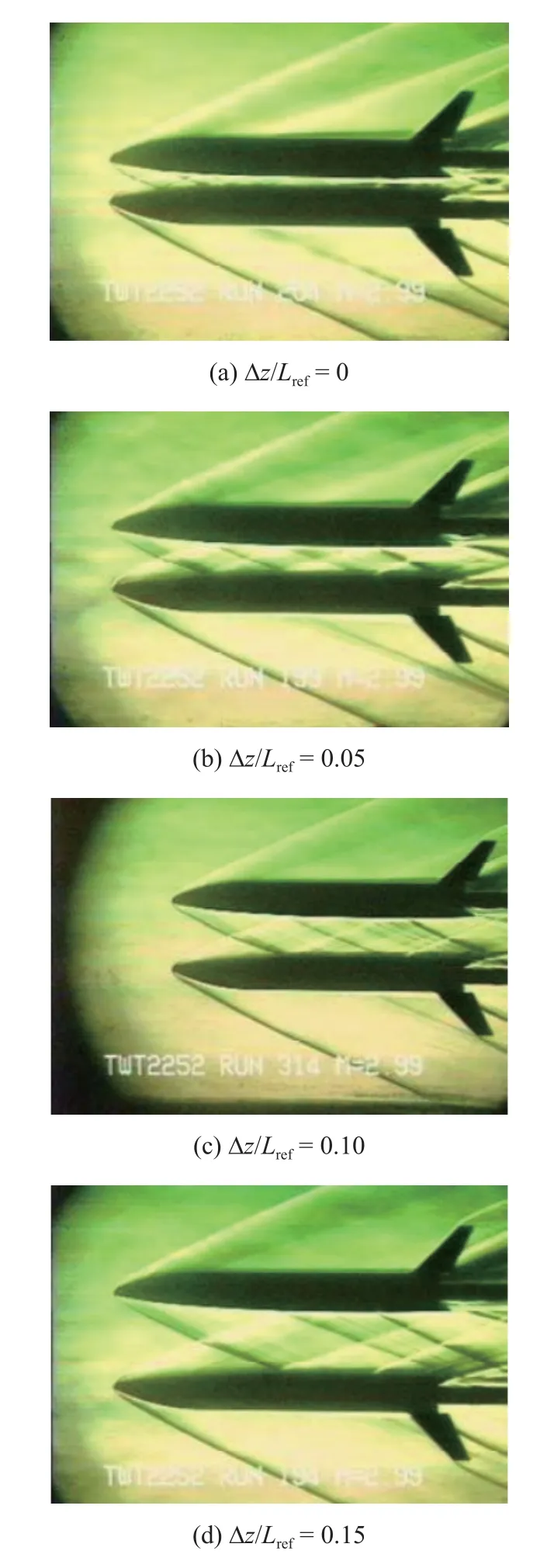
图28 不同横向间距时的纹影图(Ma=2.99) [140]Fig.28 Schlieren diagram with different lateral distance(Ma =2.99) [140]
5 总结、思考及存在问题和研究重点
5.1 研究总结
作者从事多体飞行器领域的关键技术和基础科学问题研究近十年左右,开展了诸如内埋武器机弹分离[157-159]、低空头罩分离[20]、级间分离[88]和子母弹分离[160]等空气动力学和分离动力学问题研究,主要内容包括以下几个方面.
(1)基于流动控制方程和飞行动力学方程推导了非定常风洞投放实验的物理量缩比关系[161],并对非定常高速风洞投放实验轻模型法垂直加速度不足的缺陷,提出公式修正法对其垂直位移偏差进行补偿[132],设计了补偿轻模型法垂直加速度不足的实验装置,并开展了相关风洞实验验证研究.从理论上改进和完善了非定常高速风洞投放实验方法及技术体系,实现了其在飞机-存储物(如外挂物和内埋武器[132]等)分离、多级飞行器的串联和并联级间分离、头罩分离、子母弹抛撒分离等多体分离动力学特性的直接风洞实验模拟;
(2) 引入机弹分离相容性[129-133](aircraft-store compatibility)概念对内埋武器机弹分离问题进行概括,并对细长旋成体布局外挂式武器的机弹分离安全性的Schoch 判据进行改进和完善,提出了针对细长旋成体布局内埋武器机弹分离相容性的判据表达式[134].机弹分离相容性的提出不仅考虑了载机系统,且兼顾了导弹系统,并指出了机弹分离相容性和安全性的关系[134].机弹分离相容性判据的提出克服了Schoch 判据仅仅对机弹分离安全性判定的不足和缺陷,是对Schoch 判据表达式的扩展和完善,为某内埋式机载武器控制系统设计、性能优化等提供了技术参考;
(3)将内埋武器舱流动和气动声学特性的前缘锯齿和平顶扰流控制思想,引入到内埋武器机弹分离相容性的流动控制上.采用非定常风洞投放实验方法并结合高速纹影流动显示技术研究了被动流动控制装置对超声速下机弹分离相容性的影响[134],揭示了基于前缘锯齿扰流板的被动控制的流动机理及规律,为内埋式机载武器分离相容性设计提供新的思路和流动控制策略.
5.2 几点思考
多体飞行器在飞行、回收或分离过程中均存在多体间的流动相互干扰或作用,特别是在超声速流动中,尚存在多体间的激波与激波多重反射和衍射,激波与层流或湍流边界层相互作用等复杂流动结构,这些流动干扰会导致明显的非定常、非线性的空气动力学效应,严重影响着多体飞行器间的分离动力学特性.
(1)多体飞行器在相互不接触的近距离静态飞行或相互接触的组合静态飞行过程中,由于不涉及到多体飞行器的相对运动,只涉及到流体运动方程(N-S 方程)的求解.多体间的气动力多为定常或时间平均的,多体间的流动干扰为静态干扰,可将多体飞行器固定不动进行风洞实验和数值模拟研究,与孤立体飞行器气动和流动特性的研究手段并无区别.而当这两种类型的多体飞行器处于动态或机动飞行时,多体间的流动干扰是动态干扰,需考虑多体间的非定常流动效应所带来的气动力变化.多体间的空气动力学是非定常或时间变化的,共包含两个部分:①定常部分,该部分气动力主要与飞行器的姿态角 Λ 等参数有关,每一时刻的气动力只依赖于当时气流状态;②非定常部分,其中非定常部分与飞行器的姿态角变化率有关,当多体飞行器作快速非定常运动时,需考虑非定常气动力的影响[162].
(2)多体飞行器在解锁分离后的相对运动可提炼为多体分离动力学问题,多体分离过程中的多体分离动力学是流体运动和刚体或柔性体运动相互耦合(coupling)或干扰流场下的运动体问题(moving body problem,MBP),涉及到流体运动方程(N-S 方程)和飞行动力学方程(6 DOF)的耦合求解.正如宋威[76]所述“多体分离过程中存在多体间的相互流场干扰效应,流场干扰会影响着多体飞行器的空气动力学特性,多体空气动力学特性进而会影响着多体间分离动力学特性,多体间分离动力学特性又反过来影响着多体间流场特性”.
不管是多体飞行器处于相对静止的飞行过程,还是处于相对运动的回收或分离状态,归根结底还是多体飞行器间的流动及空气动力学问题,甚至有国外学者发出多体分离动力学问题根植于多体间的空气动力学相互作用[163],还有国外著名理论空气动力学者Malmuth 指出“多体空气动力学和流动控制是高速飞行器关键重要方面(multibody aerodynamics and flow control are critically important aspects of high-speed flight vehicles)[38-39]”.
从国内检索的文献看,国内空气动力学术界目前尚未积极引入“多体空气动力学”这一概念,本文引入的“多体空气动力学”概念是限定在多体飞行器这一研究范围或领域内,如同高超声速空气动力学(hypersonic aerodynamics,限定在高超声速领域)、高速列车空气动力学(high-speed train aerodynamics,限定在高速列车应用范围)、建筑空气动力学(building aerodynamics,限定在建筑物等领域)、大迎角空气动力学(high angle-of-attack aerodynamics,限定在大迎角范围).
作者认为“多体空气动力学”概念的提出更学术化和简洁化,其并不是一个新的学科,只是空气动力学的重要研究方面.
5.3 存在主要问题及研究重点
经过多年的发展,传统的风洞实验测量技术或CFD 模拟多体空气动力学问题已取得较大进展,在技术上也取得一定突破,尽管如此,作者认为还存在相关问题需要开展重点研究,主要体现在以下几点.
(1) 大迎角机动飞行下的多体分离问题
多体分离一般会发生在多体飞行器的定常平飞状态下(迎角 α 一般不大),如头罩分离、级间分离等,但也存在大迎角机动飞行下的机弹分离问题,如先进战斗机机弹分离等.目前采用数值模拟和风洞实验研究飞行器多体分离问题时,一般是将运载体固定在风洞和CFD 模型中,相当于定常平飞状态,较少涉及到机动飞行的多体分离中的空气动力学问题,如战斗机作快速拉起到大迎角、转弯等机动动作躲避敌机、地面移动导弹攻击的同时,发射导弹武器攻击敌机.
(2) 非常靠近体间动态气动力模拟问题
多体分离动力学的间接模拟(如网格法)需要动态气动力数据(如动导数等),在多体飞行器间的距离较大时容易模拟,然而当多体间的距离较小时,不论是风洞实验和数值模拟,均存在分离体作小振幅自由振动或强迫振动时碰撞运载体的问题,这是研究多体分离非常靠近的动态气动力问题时经常遇到的问题.
(3) 动态分离模型表面流场精细化测量问题
当采用动态风洞实验研究多体分离问题时,目前能采用高速纹影测量技术获得多体分离过程中的激波结构,但无法获取动态分离模型表面上精细化流场参数(如压力分布)等,以至于对多体分离上复杂的非定常气动载荷变化规律特性和流动机理研究及认识存在不足.未来需开发精细化流场测量和显示技术研究多体分离过程中的流场参数,为CFD 计算提供验证数据.
