一种低电磁干扰的高边驱动电路*
2022-07-07赵皆辉刘兴辉霍建龙张治东赵宏亮
赵皆辉,刘兴辉,阮 昊,霍建龙,张治东,赵宏亮
(1.辽宁大学物理学院,沈阳 110000;2.江苏集萃智能集成电路设计技术研究所有限公司,江苏无锡 214000)
1 引言
近年来,基于数模混合设计的智能功率集成电路(Smart Power Integrated Circuit,SPIC)因集成度高、易于控制等特点而逐渐应用于航空电子设备、汽车电子和工业控制等领域[1]。通过采用大规模的数字电路设计,将电流调节模式、驱动控制模式、延时、可测性设计以及可编程的多次修调功能引入到系统中,增加了芯片的灵活性,提升了故障追溯能力,缩短了产品的研发周期。为追求更高的性能,系统通常需要更高频率的时钟信号,但当片内振荡器频率较高时,驱动电路内部会产生很大的电压、电流变化率,对周围电子设备产生很强的电磁干扰(Electromagnetic Interference,EMI),严重影响系统稳定性[2-3]。文献[4]针对上述问题提出了三角波调制的张弛比较器设计,通过降低di/dt来抑制EMI。但随着振荡频率的上升,高次谐波上的频谱峰值仍然较高,严重限制了电路性能。另一方面,SPIC 的核心部分是驱动电路,驱动电路通常分为高边驱动和低边驱动,分别用来产生高、低边功率器件的栅驱动信号[5];考虑到输出同等大小电流时PMOS 面积会比NMOS 面积大一倍,通常采用N 型功率管作为功率器件。为使NMOS 管完全导通,高边驱动电路需要提供一个比电源VDDH高5 V 的电压,而高边驱动中的高低压转换以及相对于电源的升压设计一直是该类芯片的设计难点。
为解决上述问题,本文提出一种基于抖频技术的扩频振荡电路,在提高振荡器工作频率的同时抑制了EMI,为数字模块和升压电路提供时钟;提出的电平移位器可以防止功率管栅极电压过高而被击穿,同时提出的电荷泵保护电路可以防止电荷泵输出电压过高和过低造成的栅击穿和功率损耗问题。
2 系统分析
2.1 传统高边驱动电路
全NMOS 结构的传统高边驱动电路如图1 所示,控制信号经过高压电平移位电路、滤波器电路和驱动电路后控制高边功率管的通断。采用自举升压电路产生驱动电压,通过VOUT的变化来抬高电位,不需要额外的时钟信号,结构相对简单。工作原理如下:当低边驱动信号为逻辑高时,低边功率管导通,浮动电位VOUT被拉低到地电位。此时,二极管DZ正向导通,VDDL对电容Cj充电,Vj等于VDDL。当高边驱动信号为逻辑高时,高边功率管导通,VOUT被上拉到电源VDDH上,且DZ反向截止。由于电荷守恒原理,Cj两端电压不能突变,Vj被自举到VDDH+VDDL,实现了驱动信号的升压。此种方法在传统功率驱动电机中被广泛采用。
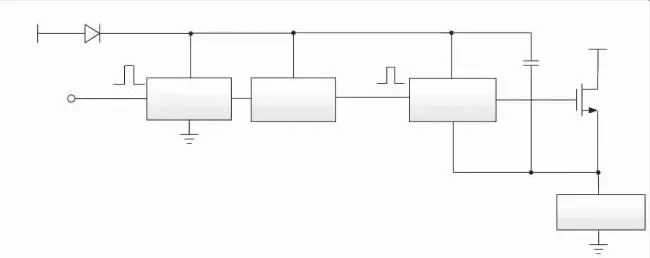
图1 传统高边驱动电路
该设计方案存在一些缺点:(1)由于Cj充电需要一段时间,限制了电路的最低频率和占空比范围;(2)由于数模混合设计中大规模数字电路的引入,没有提供时钟信号的振荡器电路;(3)在自举电路开启时会承受显著的功耗,从而降低整体的效率。
2.2 本文提出的系统结构
为了解决传统高边驱动电路运用在数模混合设计中存在的问题,本文对上述系统结构进行了改进,改进后的具体电路系统结构如图2 所示。与传统高边驱动电路相比,本文提出的系统结构通过基于抖频技术的扩频振荡电路设计,产生周期性频率变化的方波为数字电路和电荷泵电路提供时钟信号,可以大大改善输出信号的电磁兼容性;利用带保护电路的电荷泵结构和新型电平移位模块代替自举升压电路和传统电平移位模块,可以高效率地对电压进行变换,达到100%占空比工作状态,在4.5~37 V 电源电压范围内电路仍然可以稳定工作。
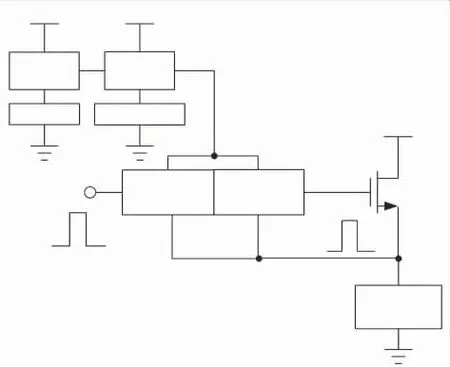
图2 新型高边驱动电路
2.2.1 基于抖频技术的扩频振荡器
抖频技术的主流设计方案有3 种,分别为模拟抖频、随机抖频及周期抖频。其中模拟抖频的频率变化是连续的,相比数字抖频来说频谱能量会分散得更为均匀,不会引入高频开关噪声,性能更好。但模拟抖频结构复杂,需要额外的低频振荡器和片外大电容,占用极大的芯片面积。数字方法中的随机抖频相比周期抖频有更好的降低频谱能量的效果,但一般需要额外的数字计数器或Sigma-Delta 调制器结构,进一步增加了数字电路的复杂程度和可靠性。本设计采用了数字电路实现的周期抖频,在能够满足系统EMI 要求的情况下尽量降低成本,提高稳定性。
本文提出的基于抖频技术的扩频振荡器如图3 所示,采用单门限张弛振荡器设计,通过改变电容C3、C4充电电流IOSC的大小来改变振荡器的频率;通过数字电路中的4 位计数器来产生4 位周期性变化的抖频代码。S1~S4分别控制MOS 管NM2~NM5 支路的导通与关断,从而改变IOSC的大小。将NM1、NM2、NM3、NM4、NM5、NM6 宽长比比例设置为12∶8∶4∶2∶1∶48,可以保证振荡电流呈步进式变化,当计数器由1111 至0000 变化时,时钟频率在25 μs 周期内完成一次从fmin(4.8 MHz)到fmax(6.13 MHz)之间的频率抖动,中心频率fc为5.3 MHz,频率扩展幅度百分比ABW为:

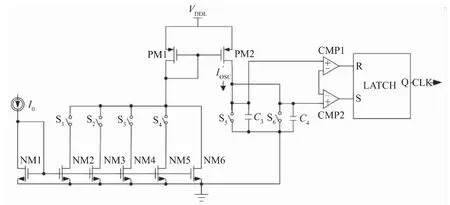
图3 基于抖频技术的扩频振荡器
抖频的原理是对载波频率的调制,根据Parseval定理,如果时域信号的能量保持不变,那么频域的能量也保持不变。当开关频率和频带的谐波频率展开,就必然会降低频带的准峰值和平均值,从而降低了电磁干扰[6]。下面从傅氏级数及空间交变电磁场的角度对抖频技术如何抑制EMI 进行分析。
对于频率为f0、幅度为a 的方波信号进行傅里叶变换:

在振荡频率及其奇次谐波这些离散的频率点上频谱峰值很高、干扰能量集中时会产生更严重的电磁干扰。采用抖频技术可以将干扰信号的频带展宽Δf 在总能量不变的前提下,使干扰能量分散到附近的边频带上,从而降低频谱峰值,满足系统对电磁兼容性的要求。根据文献[7],EMI 能量降幅ERed(dB)为:

其中频率f 的单位为MHz。式(3)可以对占空比为50%的方波基频及其奇次谐波的降幅进行预测,从而指导抖频电路的设计。
下面以场的形式进行分析,以交变电场为例,交变电场的耦合如图4 所示,EMI 干扰源上产生交变电压US,通过源阻抗ZS接地,接收器通过阻抗Zr接地。干扰源对接收器的电场感应耦合可以等效为电容Cc的耦合。显然US、Zr、Cc和ZS构成了电磁耦合回路,接收器接收的信号Ur为:
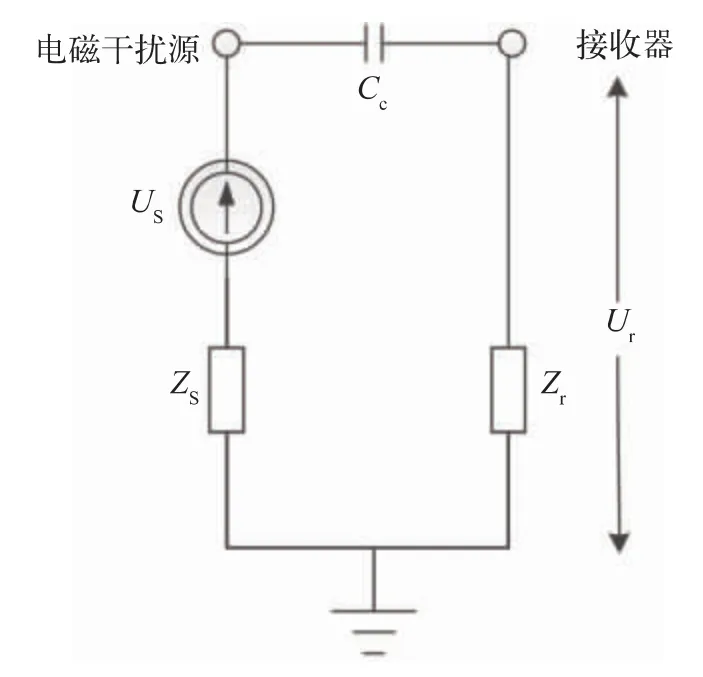
图4 交变电场的耦合

其中ω 是交变电场的频率,Zr、ZS是ω 的函数。同一测试阶段内干扰源产生的能量是一定的,所以在应用抖频技术后,接收器接收的信号Ur分布在±Δf 的频带内进行叠加。相比于单一频率调制下Ur只分布在载波及其奇次谐波频率点上进行叠加,显然采用抖频后的Ur更小一些,这与从傅氏级数角度分析的结果一致。
2.2.2 新型高压电平移位器
对于电平移位器,设计时主要考虑3 个相互影响的指标:抗共模噪声能力、速度及功耗。其中对于高dv/dt 的应用场景下,由于节点间的寄生电容导致电路产生额外的共模噪声电流,可能会引起电路内部管子误开启或击穿。通常的解决方法有采用具有滤波作用的缓冲器或增加额外的抗共模噪声管等,增加的电路也不可避免地降低了速度,增加了功耗。另外由于输出节点的寄生电容较大,为了提升速度就需要增大电流,也需要在功耗与速度之间进行折衷设计[8]。
传统的电平移位器如图5(a)所示,可以将输入信号的高电平由VDDL转换到VDDH,但当VDDH过大时,薄栅器件的栅极会发生击穿,此种结构限制了功率集成电路的电源范围[9]。本文提出的新型高压电平移位器如图5(b)所示,其中Z1 为稳定电压VBS=6 V 的稳压二极管。输出电压VOUT为:

图5 电平移位电路

其中VF_OK=VDDH-VBS,VF为产生的浮动电位,其值被钳位在VF_OK-VTHP上,VTHP为PMOS 管阈值电压,即

VF_OK作为偏置电压连接到MP5 和MP6 的栅极,用于将源极电位钳位在VDDH-5 V 上,防止MN7 和MN8 发生击穿。
当IN 逻辑高时,MN8 导通,此时MP3 栅极电压为VDDH-5 V,MP3 管导通,MN9 栅极电压为VDDH,MN9 导通,此时OUT 被下拉到VF;当IN1 逻辑低时,MN8 截止,OUT 点向下看的阻抗趋于无穷大,此时OUT 被上拉到VDDH。该新型电平移位器适用于宽电源电压范围下的高低压转换,最高电源电压取决于MP5、MP6 管源漏之间的耐压值,大大增加了电源电压输入范围。
2.2.3 带有保护电路的电荷泵结构
升压电路的设计需要满足2 个条件:(1)输出电压VCP需要高于VDDH,从而使N 型功率管完全导通,过低的VCP会增大功率管的导通电阻,产生额外的功率损耗;(2)VCP-VDDH不能高于N 型功率管的栅源耐压值,过高的VCP会击穿内部的寄生二极管,对器件造成损害。图6(a)为本文采用的一阶Dickson 电荷泵原理图,t 时刻下输出电压与C1和C2之间存在如下关系[10]:

其中α 为开关管体效应参数,Vg为单级电荷泵能产生的最大电压。
为了防止VCP过高和过低,采用了如图6(b)所示的一种结构简单、实用的保护电路。通过调节电阻阵列R1、R2、R3的比例来调节VCOMP1和VCOMP2信号的阈值,可以将VCOMP1设置为电荷泵过压保护电路,当VCP过高时发生跳变,用来截止电荷泵电路的时钟信号,防止高侧功率管的栅极击穿;可以将VCOMP2设置为电荷泵欠压锁定信号,当VCP过低时发生跳变,用来停止驱动电路工作,防止输出状态错误。
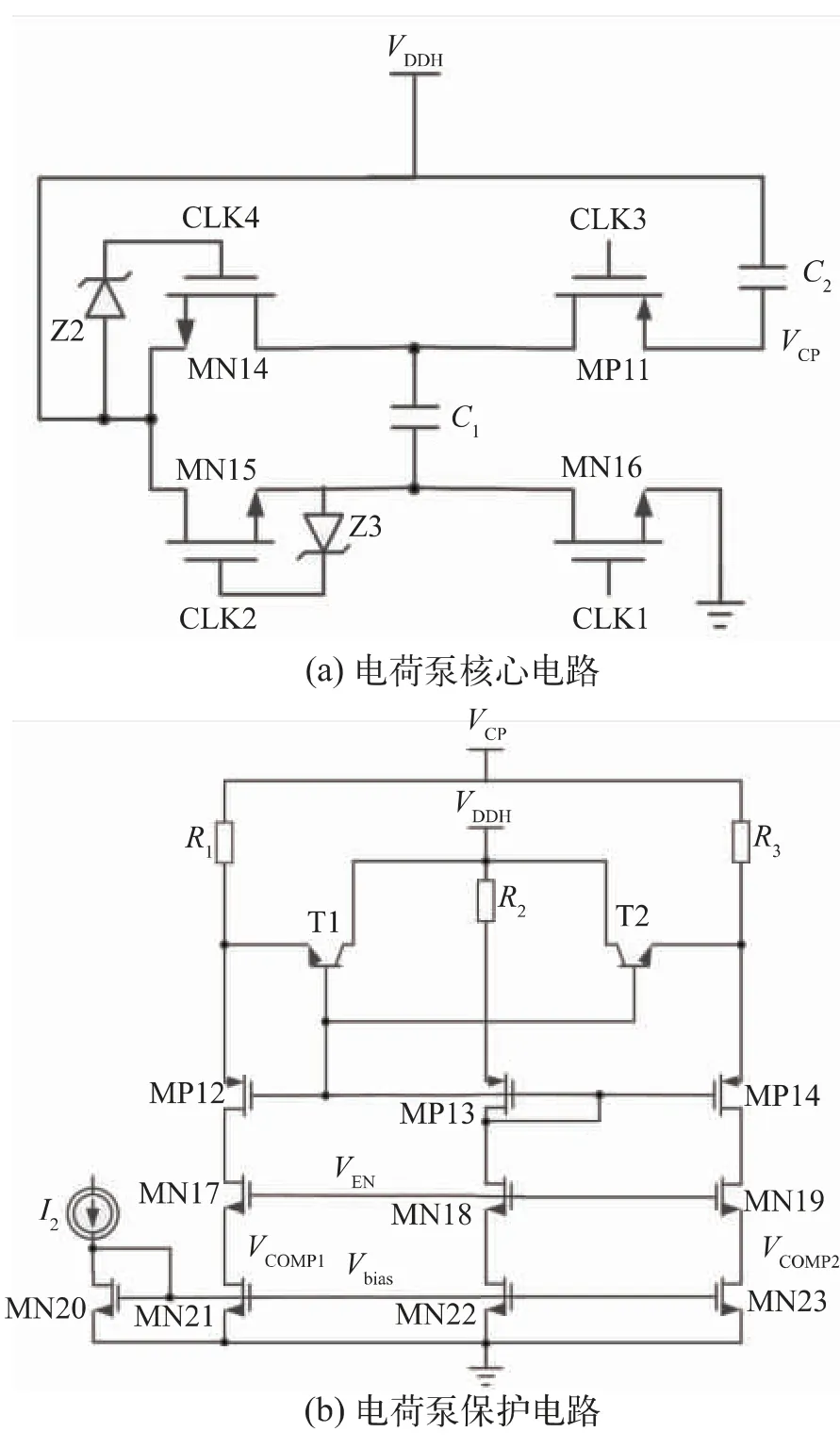
图6 带保护电路的电荷泵设计
电容的容值与成本和输出电压纹波相关,电容容值较大,则电压纹波会更小,但成本会增加。同时为保证高边驱动电路可以达到100%占空比工作的要求,本设计中电荷泵采用片外电容来达到足够大的容值。电荷泵电路充电时,输出电容C 为负载提供电流,负载电流与频率的关系为:

其中IL为负载电流,C 为电容容值,UC为电容两极板的电压。本设计中电容过小会影响电荷泵充电的速度,造成其在大负载的情况下过低,使开关管的导通电阻增大,同时也会增大VCP输出纹波;而电容过大则会增加成本。本设计最终采用22 nF 的泵电容C1,100 nF 的输出电容C2。
3 系统仿真与分析
基于0.18 μm BCD 工艺,利用Cadence Virtuoso进行仿真。在5 MHz 工作频率下,对文献[4]和本设计产生的振荡信号分别进行傅里叶变换(FFT),振荡信号频谱如图7 所示。
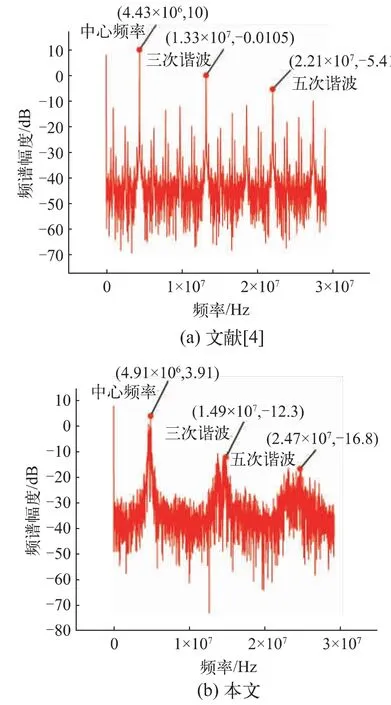
图7 振荡信号频谱
通过调节抖频后振荡信号的中心频率为5 MHz,扩频幅度为±12.1%。扩频以后的时钟频率在25 μs 周期内完成一次从fmin(4.8 MHz)到fmax(6.13 MHz)之间的频率抖动。从图7(a)可知,频谱在中心频率5 MHz以及其奇次谐波15 MHz、25 MHz 附近出现了峰值,干扰能量集中,会产生很强的电磁干扰;从图7(b)可知,经过抖频处理后频谱在中心频率和奇次谐波上的干扰能量被分散到若干边频带上,从而有效降低了频谱峰值,抑制了电磁干扰。同时频率越高,频带越宽,频谱峰值的降幅也会越大。仿真结果显示,采用抖频后振荡信号的频谱峰值在中心频率处下降约6 dB,在三次谐波处降幅达12.3 dB。仿真结果符合预测趋势,采用抖频技术后的扩频振荡器具有低电磁干扰的良好特性,大大改善了系统的电磁兼容性。
新型电平移位器工作仿真结果如图8 所示,可以看到输入信号电压在0~5 V 之间变化时,经过电平移位器后的输出在电源电压VDDH~(VDDH-5 V)之间变化。该结构可以有效防止功率管发生栅击穿,大大提高了工作电压范围。

图8 新型电平移位器瞬态响应
在增加了本文设计的保护电路后,过压保护信号VCOMP1在VCP达到VDDH+4.7 V 后跳变为逻辑低电位,暂停电荷泵时钟的输入,此时电荷泵电路由于无时钟信号的输入避免了不必要的功耗以及地信号干扰;欠压锁定信号VCOMP2在VCP相对过压保护点电压下降了2.5 V 后跳变为逻辑高电位,通过暂停驱动电路的工作来等待VCP上升到能够完全将N 型功率管导通,可以防止当VCP过低时造成的输出错误状态,仿真结果如图9 所示。

图9 受保护电路控制的电荷泵波形
本设计相对于相关文献中电路的优势如表1 所示,表1 对比了在5 MHz 的工作频率下,文献[4]与本设计三次谐波时的频谱峰值;文献[4,11-12]升压电路仅采用稳压二极管来防止过压,一般工艺下,当结电流超过1 mA 后,6 V 的稳压二极管会发生击穿,此时过压保护便会失效,稳定性较差。本设计则在增加了欠压保护的同时提高了稳定性。
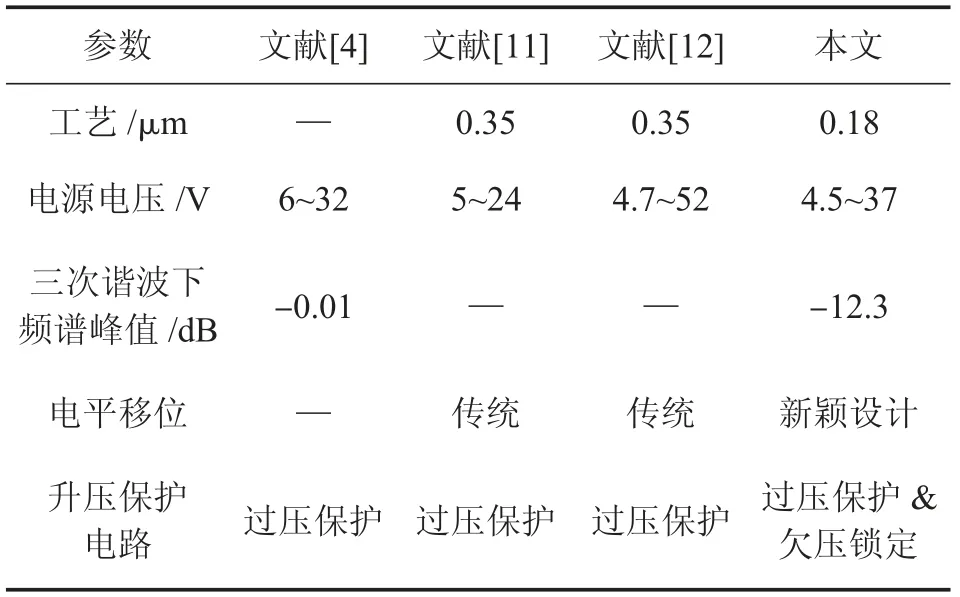
表1 性能参数对比
图10 为基于本系统方案设计的一款数模混合H桥电机驱动版图,尺寸为1.94 mm×1.94 mm。
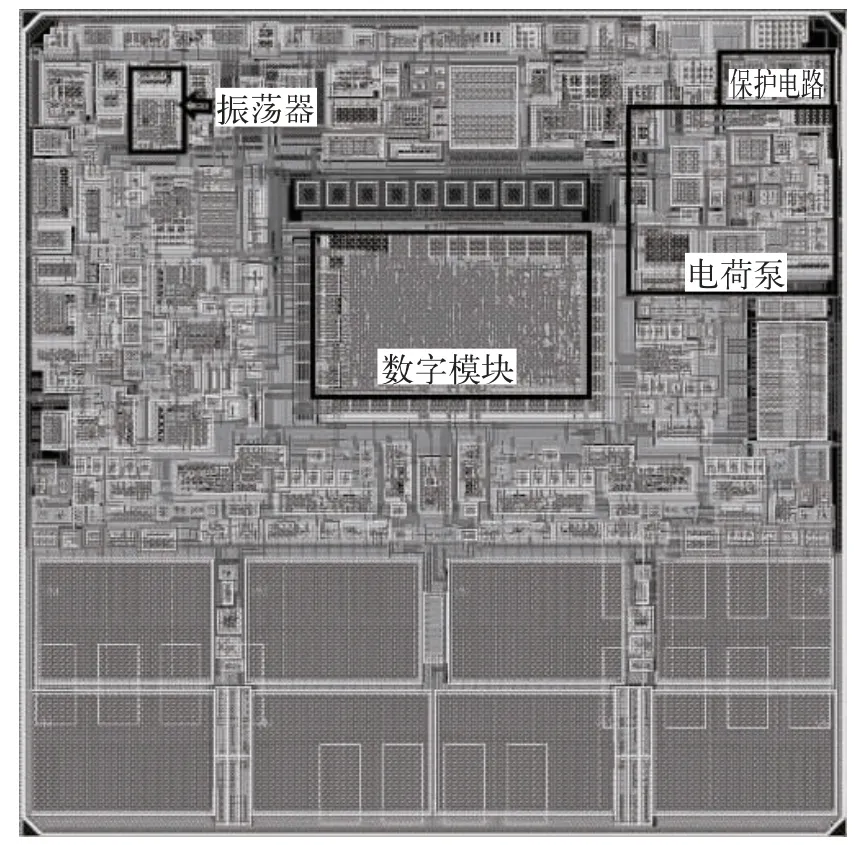
图10 版图设计
4 结论
本文针对数模混合设计的高边驱动电路提出了一种新的系统方案,与传统高边驱动电路相比,该系统通过基于抖频技术的扩频振荡电路设计,产生周期性频率变化的方波,为数字电路和电荷泵升压电路提供时钟信号,其频谱幅度在三次谐波处降幅高达12.3 dB,可以大大改善系统的电磁兼容性;利用带保护电路的电荷泵结构,可以避免电荷泵输出过高或过低时带来的危害;通过新型电平移位器可以使电路在4.5~37 V 电源电压范围下稳定工作,拓宽了电源电压范围。