Real-time energy-efficient anticipative driving control of connected and automated hybrid electric vehicles
2022-07-06ShiyingDongHongChenLuluGuoQifangLiuBingzhaoGao
Shiying Dong·Hong Chen·Lulu Guo·Qifang Liu·Bingzhao Gao
Abstract In this paper, we propose a real-time energy-efficient anticipative driving control strategy for connected and automated hybrid electric vehicles (HEVs). Considering the inherent complexities brought about by the velocity profile optimization and energy management control, a hierarchical control architecture in the model predictive control (MPC) framework is developed for real-time implementation. In the higher level controller, a novel velocity optimization problem is proposed to realize safe and energy-efficient anticipative driving.The real-time control actions are derived through a computationally efficient algorithm.In the lower level controller,an explicit solution of the optimal torque split ratio and gear shift schedule is introduced for following the optimal velocity profile obtained from the higher level controller.The comparative simulation results demonstrate that the proposed strategy can achieve approximately 13% fuel consumption saving compared with a benchmark strategy.
Keywords Connected and automated vehicle · Hybrid electric vehicle · Anticipative driving · Hierarchical control architecture·Real-time solution
1 Introduction
In recent years,serious environmental concerns have placed the energy efficiency of vehicles at the center of researchers’efforts [1]. Great leaps have been made in this area by employing a variety of strategies that reduce fuel consumption and carbon dioxide release.Among these strategies,the hybrid powertrain has been widely concerned [2]. A typical HEV usually consists of the internal combustion engine(ICE),the energy storage unit,and the electric motors.Both the engine and the motor can provide power either separately or jointly. The energy management strategy (EMS)aims at optimally distributing the power among the energy sources.To fully maximum energy-saving potential,the need for a real-time EMS for HEVs becomes a critical issue in vehicle control [3-5]. In addition to the electrified powertrain trend,connected and automated vehicles equipped with communication devices to access information from traffic big data yield significant improvements in the energy economy[6,7].To develop such connected and automated vehicle(CAV) applications, the problem can be formulated as an optimal control problem based on predicted traffic information [8,9]. The key issue is to solve, in real-time, the energy-efficient anticipative driving problem of a CAV by predicting future traffic conditions and responding proactively. As stated above, there are two key challenges in the area of energy-efficient anticipative driving control for connected and automated HEVs.
The first challenge is to address the problem of automotive control in real time.This is crucial because the optimal control inputs need to be recalculated when the controlled vehicle obtains rapidly changing traffic information. During the past few decades,a large variety of EMSs have been studied from both control and optimization perspectives[10].Comprehensive overviews have also been published to provide comparisons of the strategies [11]. Rule-based (RB)EMSs, which are based on heuristics, intuition, or human expertise without prior knowledge of the trip, have been widely investigated in the automobile industry[12,13].The main advantage of an RB-EMS is its simplicity, although its optimality is lacking. Since optimization-based EMSs have a better theoretical energy economy[14],optimizationbased approaches,such as dynamic programming(DP)[15],Pontryagin’s minimum principle(PMP)[16,17],model predictive control (MPC) [18-21], and reinforcement learning(RL) [22,23], have received more attention. Moreover, the up-to-date numerical algorithm[24]has been investigated in automotive control.However,since the energy consumption model with discrete gears is usually nonlinear and complex,nonlinear optimization is usually time-consuming and not suitable for online implementation in general.Thus,a computationally efficient control strategy needs to be developed.
The second challenge is whether the strategy can perfectly predicttheprecedingvehicleandeffectivelyusethepredicted information. However, such a prediction of the externally controlled vehicle in a dynamic traffic environment is not an easy task[25,26].Most of the existing studies,such as that on an adaptive cruise control(ACC)[27-29],use the information of the immediate preceding vehicle(iPV)and generate control action by ignoring the future situation.The simplest straightforward ways in which to predict the preceding vehicle (PV) are considering that it will continue maintaining the currently measured states in the prediction horizon[30].Obviously,theenergy-savingpotentialofanticipativedriving based on such an imperfect prediction may not be maximized in the long run. Due to the rapid development of vehicleto-everything(V2X)communication,precise information of preceding traffic can be easily obtained with negligible delay,and thus, a relatively accurate prediction of future traffic can be achieved.In a previous paper[31,32],more accurate velocity prediction models of the iPV are proposed using the current velocity and acceleration state information.
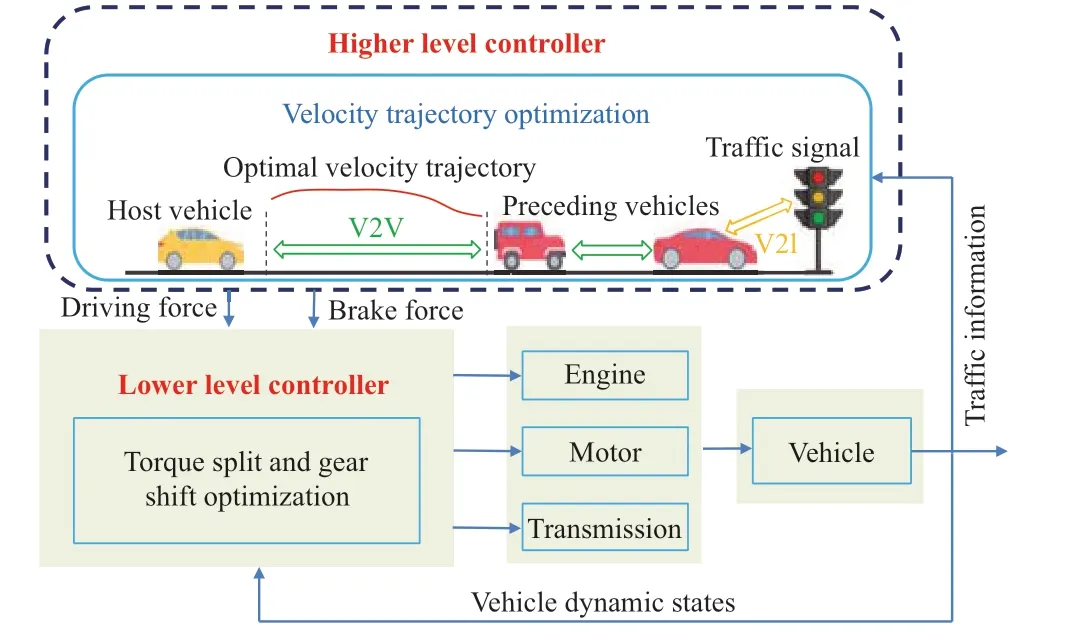
Fig.1 Hierarchical energy-efficient anticipative driving control strategy for an HEV using preceding traffic information in the connected vehicle environment
This paper proposes a hierarchical energy-efficient anticipative driving control strategy to find a real-time optimal solution of a connected and automated HEV, as shown in Fig.1. The higher and lower level controller share information with each other and solve two different problems that aim at improving the energy economy. In the higher level controller, based on predicted traffic information, a novel velocity trajectory optimization is proposed for the realization of highly anticipative driving. The lower level controller uses an explicit solution of the optimal torque split ratio and gear shift schedule for following the velocity trajectory obtained from the higher level controller in an energy-efficient manner.
The paper contributions can be highlighted as follows:
1) Considering the inherent complexities brought about by the velocity profile optimization and energy management control, a hierarchical control architecture in the MPC framework is proposed to reduce the complexity;
2) Anovelvelocityoptimizationstrategyisproposedforsafe and energy-efficient anticipative driving through the early and effective anticipation of the predicted information;
3) The real-time energy-efficient solutions of velocity optimization and energy management problem are generated by the computationally efficient algorithms,respectively.
The comparative simulation results demonstrate (1) a significant improvement in the fuel economy of the proposed strategy and (2) an improvement of the computational efficiency of the proposed strategy against traditional numerical methods.
The rest of this paper is organized as follows.In Sect.2,thepredictionoftheprecedingvehicleisdeveloped.Section3 describes the velocity optimization problem for anticipative driving in the higher level controller. In Sect.4, the lower level controller is formulated.In Sect.5,the effectiveness of the energy-efficient anticipative driving system is evaluated throughcomparativesimulations,andfinally,conclusionsare given in Sect.6.
2 Prediction of the preceding vehicle
The host vehicle driving is affected by both geographic information(such as traffic lights,road topologies,and road speed limits)and preceding vehicles.For convenience,the driving condition is mainly divided into two scenarios: one is the host vehicle with preceding vehicle, while the other is the host vehicle without preceding vehicles.
2.1 Scenario I:host vehicle without preceding vehicles
In this scenario,the host vehicle is mainly affected by the traffic light and road speed limit information,not by surrounding vehicles. To reduce energy consumption by preventing a vehicle from coming to a full stop at the intersections,we set the prediction horizon according to the remaining time within the green phase. The speed constraint of the velocity optimization problem is the maximum road speed limit.Through the above-mentioned approach, the predictive energy efficient control inputs with external traffic information in this scenario can be obtained. It is noted that the velocity optimization problem in this scenario is presented in our previous research[21].Thus,this paper mainly focuses on the energyefficient anticipative driving control problem in scenario II.
2.2 Scenario II:host vehicle with preceding vehicle
The future speed of the preceding vehicle is related to the traffic flow and driving style[32].To accurately predict the future speed information of the preceding vehicle, a multiplier [31] is introduced to estimate the acceleration of the preceding vehicleap(τ)forτ >t,which is defined as
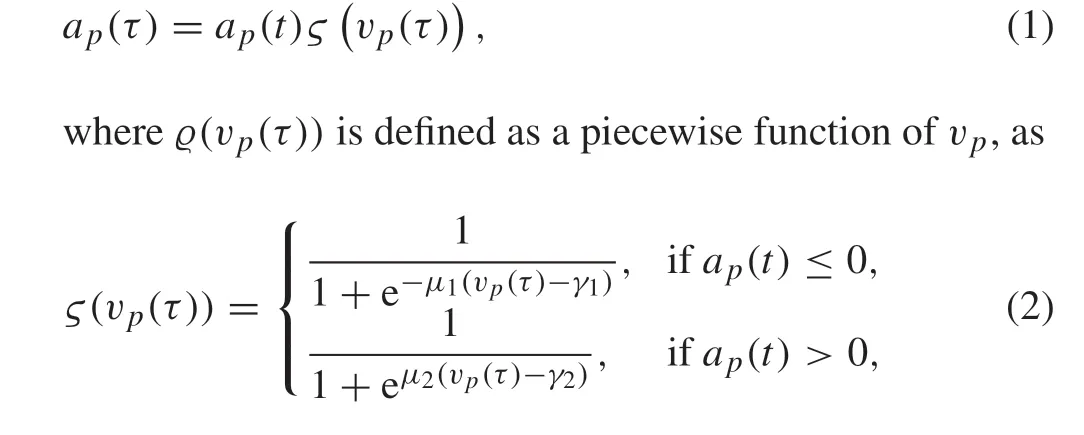
whereμ1>0 andμ2>0 express the sharpness of the function,vpis thespeedof theprecedingvehicle,andthen,γ1andγ2define an approximate range of velocities.As shown in Fig.2, the above function means that the acceleration of the leading vehicle approaches zero when the vehicle reaches a maximum speed limit or completely stops,and the vehicle never moves backward.As discussed above,through Eq.(1),we can predict the speed of the preceding vehicle.How to use the obtained information will be described in the following sections.
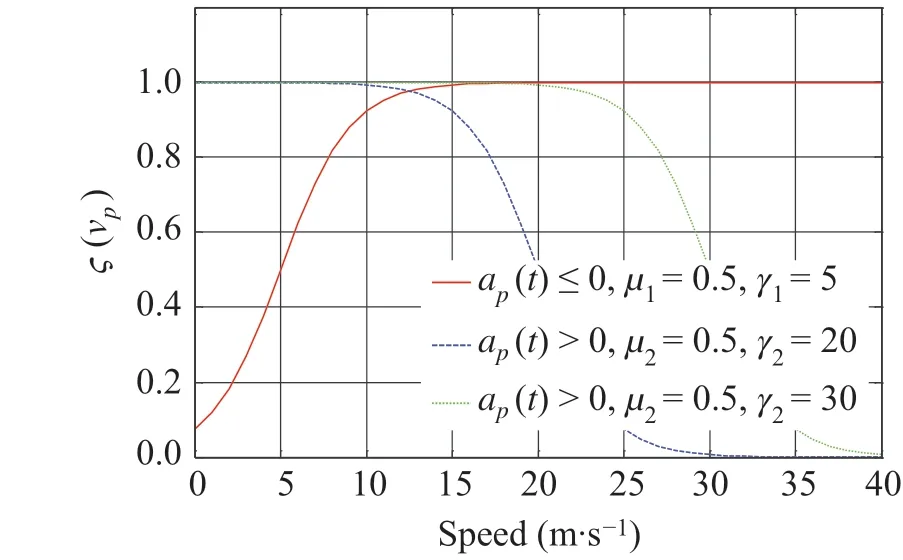
Fig.2 Multiplier ς(vp(.))in the prediction model(1)
3 Higher level controller:velocity optimization for anticipative driving
Using the predicted traffic information, the velocity optimization problem for energy-efficient anticipative driving is formulated in this section.The control will be updated every fixed time(selected asΔt=50ms in this layer)as new traffic information becomes available.The real-time solution is generated by a fast algorithm that combines Pontryagin’s minimum principle(PMP)and a numerical method.
3.1 Velocity optimization problem formulation
For the velocity trajectory optimal problem, the objective is to find the optimal velocity profile to improve energy efficiency.In equations,find the control policyu:=[Ft(k),Fb(k)]T∈R2,k∈[1,Np],such that
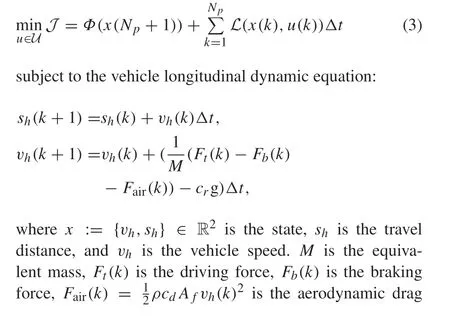
where theξ1,ξ2,φare the weighting parameters and ~v fis the terminal speed.The terminal constraint is added to satisfy traffic constraints and will be discussed later.
3.2 Constraints
While using predicted traffic information, multiple constraints should be added to the velocity optimization problem, such as speed limitsv(k)≤vlim(s(k)), and safe car-following distance.Assuming that the maximum deceleration is estimated asah,maxbr=ap,maxbr=g,then in case of accidents,the traveling distances of the two vehicles are
3.3 Fast numerical solution based on PMP
3.3.1 Necessary conditions of optimality
Consider the velocity trajectory problem and defining the Hamiltonian functionHas
whereuo(k),xo(k),λo(k)are the optimal control trajectory,state trajectory and corresponding co-state trajectory,respectively.Since theHis not a function of the state variablesh(k),the optimal co-stateλo1(k)is a constant(λ1≡0).
3.3.2 Explicit solution
Based on the above necessary conditions,we can derive the relationship between the optimal statesxo,λoand the control variableuo.At time stepk,reformulate the Hamiltonian(11)as a two-dimensional polynomial as follows:
Then,according to the optimal control law(13)and characteristics of quadratic functions, the explicit solution can be obtained by
3.3.3 Bisection method for finding the optimal solution
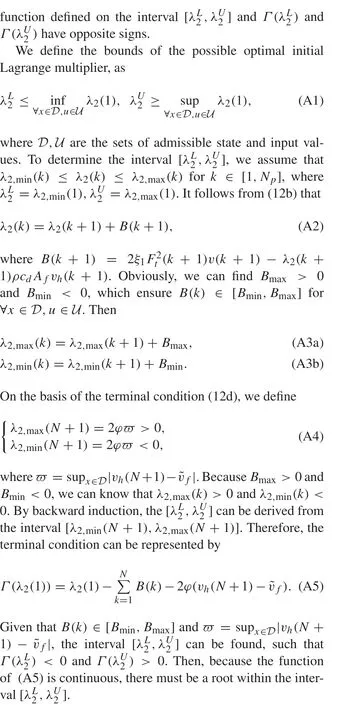
Based on the necessary conditions and explicit solution given above,we can easily derive the relationship between the initialstate{λ2(1),vh(1)}andtheterminalstateλ2(N+1).Ifthe initial value of the costate variableλ2(1)can be found such that the terminal conditionλ2(N+1)-2φ(vh(N+1)-~v f)=0,then the boundary value problem can be solved by the preceding optimal control law (20). As described above, the original optimization problem(3)is formulated as a problem of finding the roots of a nonlinear equation. The bisection method is used to find a feasible root(optimal initial costate variableλ2(1)),wherein the termination of the iteration can be defined as

whererdenotes the number of iterations, and∈is the prescribed tolerance.The convergence analysis is presented in Appendix A.
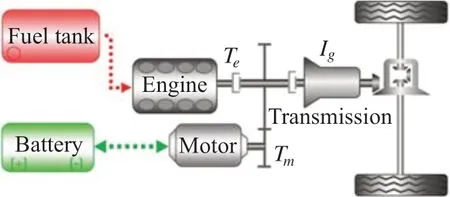
Fig.3 Topology of the parallel hybrid electric vehicle powertrain
4 Lower level controller:torque split and gear shift optimization
In this section,with a parallel HEV powertrain model illustrated is Fig.3,we provide an explicit solution of the optimal torque split ratio and the gear shift schedule under the optimal velocity obtained from the higher level controller during the time horizon[t,t+Δt].
4.1 Problem formulation
We define electric motor torqueTmas having a relationship with the total torque demandTdby introducing a ratioRt.Thus, there are four possible driving modes, namely pure thermal mode(Rt=0),pure electric mode(Rt=1),hybrid mode(0<Rt <1)and recharging mode(Rt <0).
Given driving force demandFt(t)solved by the higher level controller in time lengthτ=[t,t+Δt]which is also the prediction horizon of the suboptimal problem,we find the optimal control law of this layer controlleru= [Rt,Ig]T,which minimizes energy consumption:
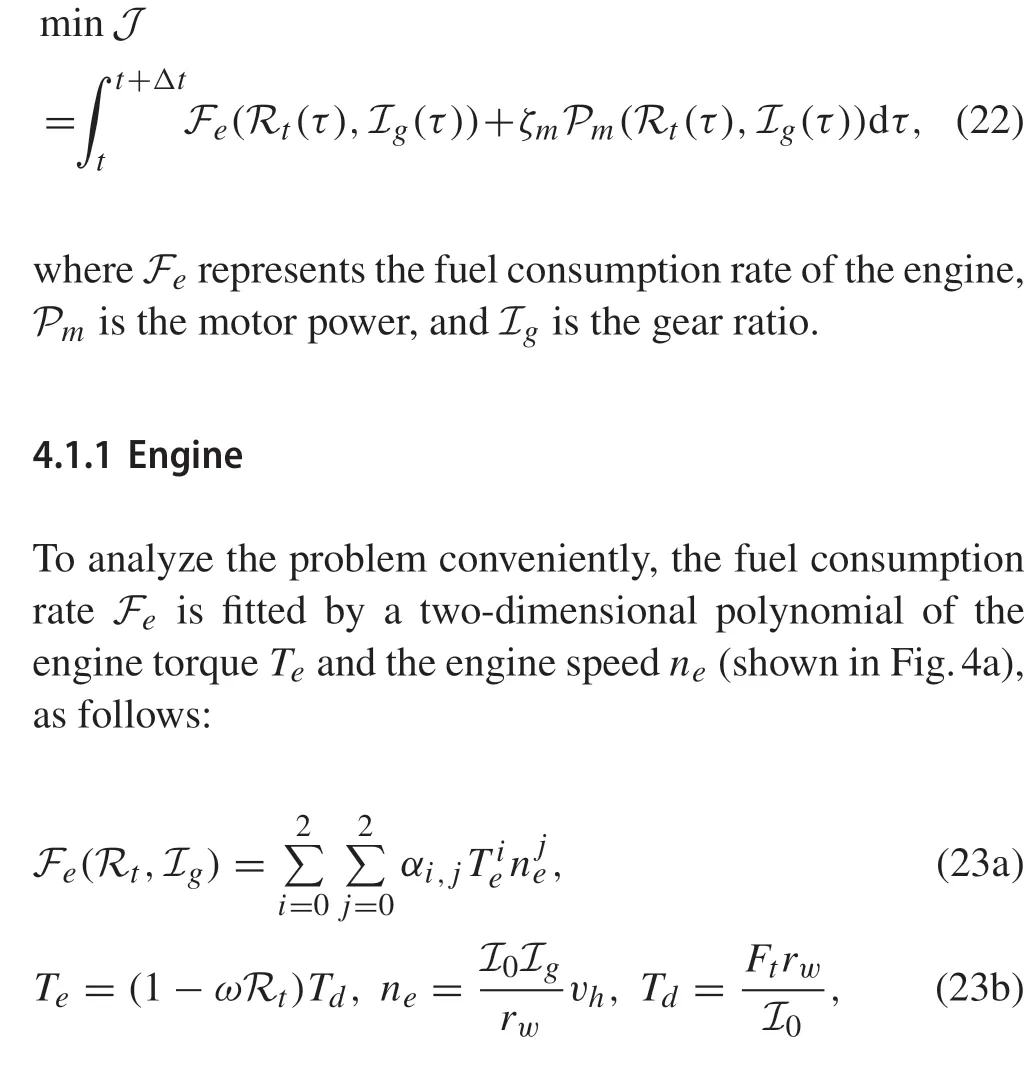
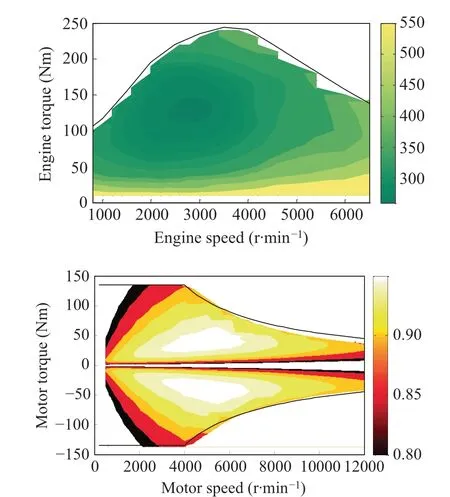
Fig. 4 a Fuel consumption rate map of an engine Fe g/kWh. b Efficiency map of an electric motor
whererwis the dynamic tire radius,I0is the final transmission ratio,αi,jare the fitting coefficients,andωis a vehicle parameter determined by its construction.
4.1.2 Electric motor
The motor power is modeled as a function of the mechanicalTmnmand the machine efficiencyηm,as follows:
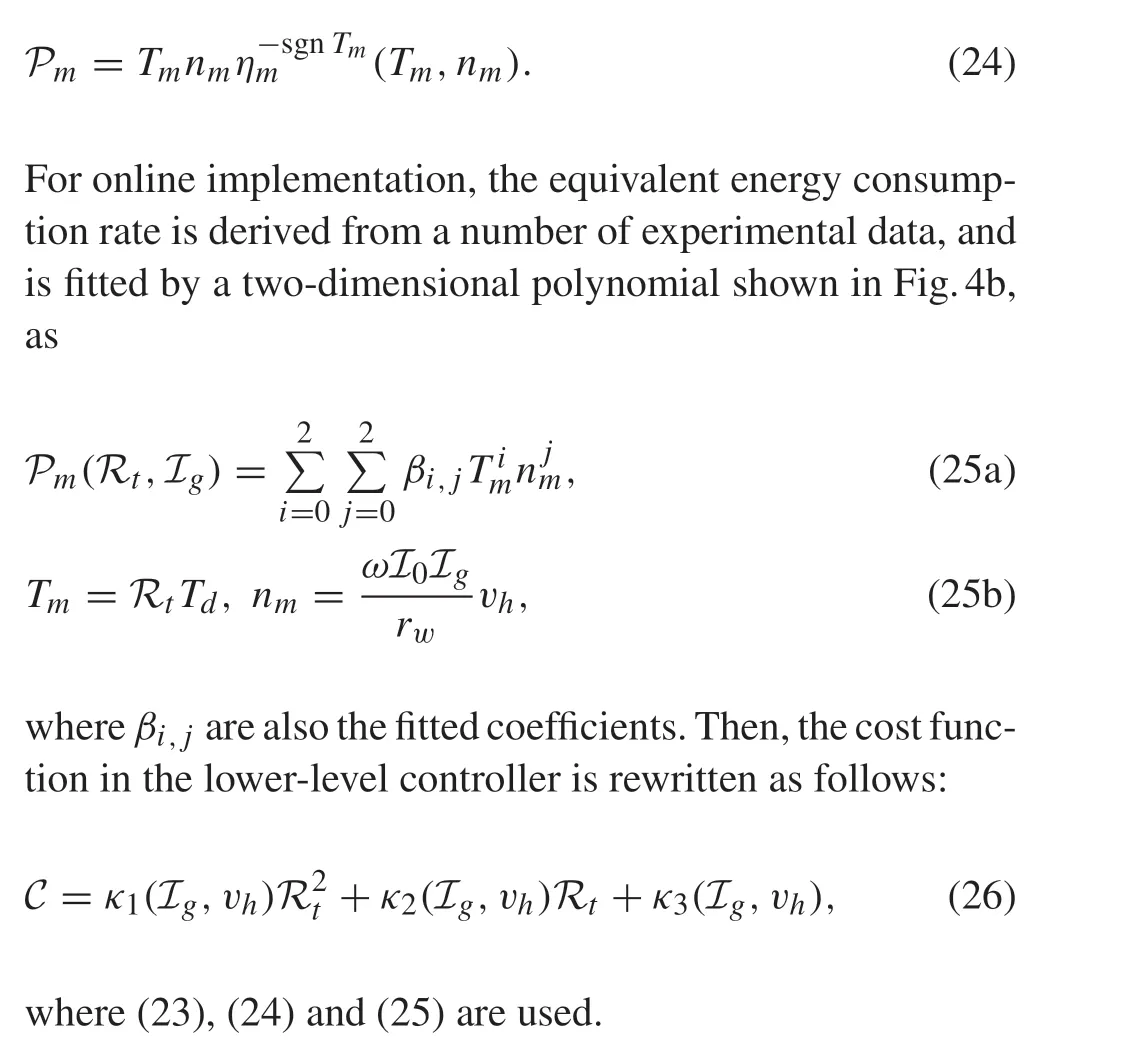
The system constraints for the above problem are summarized as follows:

4.2 Explicit solution of the torque split
For the purpose of avoiding frequent and skippable gear shift,during the control horizon[t,t+Δt],it is assumed that the gear ratio is set as constant. Thus, the possible gear shift commands are supposed as{-1,1,0},respectively,indicating downshifting,upshifting and sustaining.There are three optimalcontrollawsoftorquesplittingcorrespondingtoeach of the possible gear ratios.Consequently,the three gear positions determine three energy consumption values,J-1,J1andJ0for which the derivation is presented in detail as follows.
The Hamiltonian function of this optimal problem is formulated as follows:
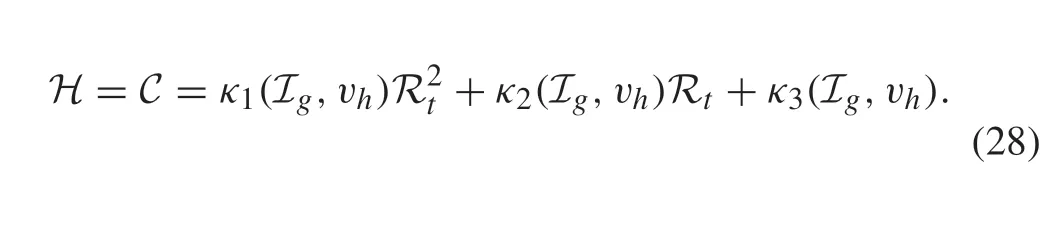
Similar to the discussion in the previous section,the Hamiltonian functionHis a quadratic function of the control variablesu= [Rt,Ig]T. We can also obtain the explicit solutions according to the characteristics of quadratic functions as follows:
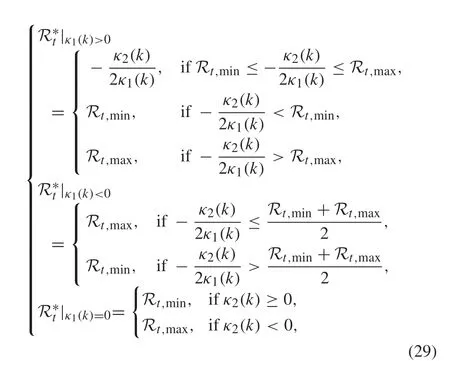
where the control input constraintsRtor,maxandRtor,minare
According to the above explicit control law, at current timet,the predictive energy consumption is obtained under a given gear ratio.Then,the optimal gear shift is determined by comparing these energy consumptions corresponding to the given gears,asI*g=arg min{J-1,J1,J0}.In this paper,the sampling time of the lower level controller isδt=10ms.
5 Simulation results and discussion
The simulation study is conducted in this section to demonstrate the validity of the proposed energy-efficient anticipative driving control strategy for connected and automated HEVs.
5.1 Fuel economy
In this section,a few comparative simulations are performed to evaluate the energy-economy performance of the proposed energy-efficient anticipative driving strategy. A standard ACC system with the EMS presented in Sect.4 is chosen as the benchmark strategy,wherein,if there is no preceding vehicle, then the host car accelerates to the setting speed,cruises until it approaches a preceding vehicle, follows the preceding vehicle and only considers safe distance.
Table 1 and Fig.5 summarize the energy-saving capacity with different lengths of the prediction horizon(Np).To acquire convincing comparison results for fuel economy,the final SoC is equal to the initial value.From the results,we can see that with the increasing length of the prediction horizon,the fuel consumption decreases at first and then increases after the prediction steps exceed a certain value.The reasons for this phenomenon are as follows: (1) with the increas-ing length of the prediction horizon,the vehicle can respond proactively to reduce the fuel consumption by predicting the further future traffic conditions. (2) Unfortunately, the prediction error also increases with the increasing length of the prediction horizon, and when the prediction model cannot accurately estimate the traffic situations ahead, the energysaving potential will decrease.Therefore,in energy-efficient anticipative driving control,a proper prediction horizonNpshould be considered.
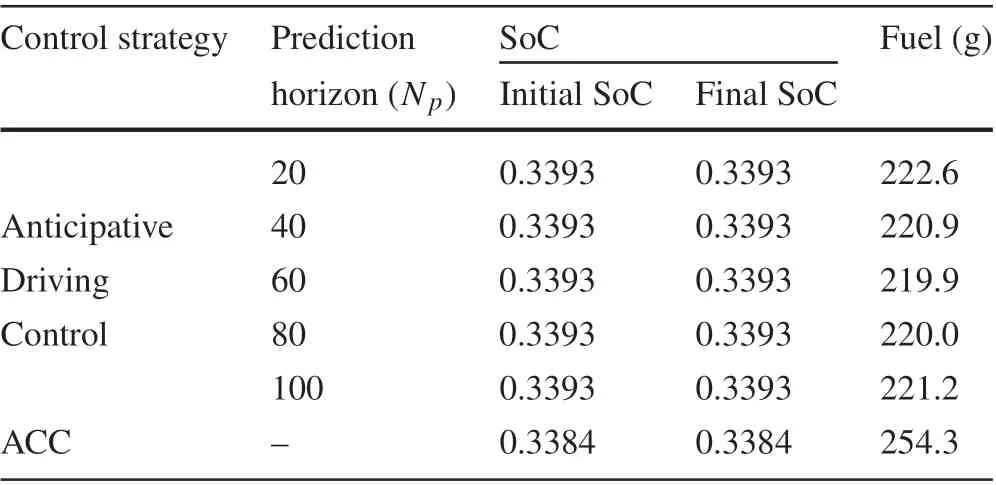
Table 1 Energy consumption comparison
An example of simulation results is shown in Fig.6.From the results, we can see that the vehicle with the standard ACC is controlled aggressively. However, the host vehicle controlled by the anticipative driving strategy accelerates and decelerates relatively gently.The reason for this difference is that host vehicle can proactively optimize vehicle speed by considering the preceding traffic conditions and trends.
5.2 Computational efficiency
For further evaluation of the improved performance in terms of computational efficiency,we compare the computational timeofsolvingtheoptimalproblemwithsequentialquadratic programming(SQP).It is noted that the computational efficiency of EMS in the lower level controller was discussed in our previous research[21],thus,this paper only focuses on the computational efficiency of the velocity optimization in higher-level controller.
In this paper, the simulations are run on an Intel(R)Core(TM) i7-8550U CPU (1.8 GHz). An estimate of CPU computational time was obtained using the CPU command in MATLAB. Figure7 shows the mean values of computational time at each time step using different prediction stepsNpwith the same driving cycle in the simulation of Sect.5.1.The results indicate that the proposed method is more computationally efficient as compared to the SQP while ensuring computational accuracy (see Fig.8). The reasons for this improvement are as follows:(1)In the traditional numerical methods,such as SQP,the original optimal control problems are translated as nonlinear programming problems,wherein thedimensionsofthevariable(mu+mx)×Nparetoolarge.
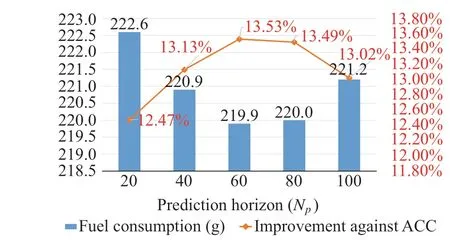
Fig.5 Fuel consumption and economy improvement
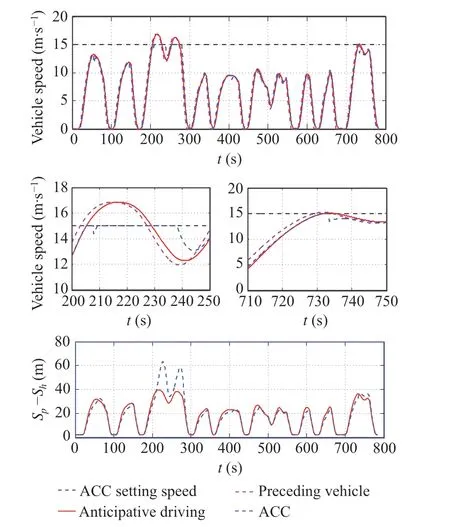
Fig.6 Comparison in vehicle speed and car-following distance results(Np =60)
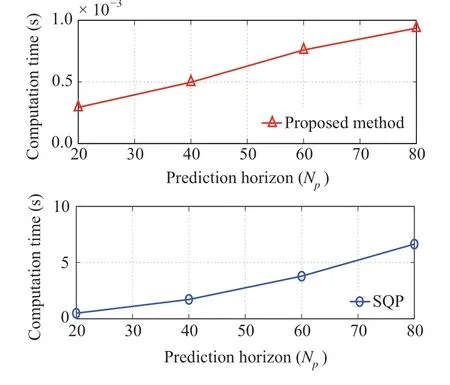
Fig. 7 Computational efficiency the proposed method compared to SQP
Here,mx,muare the dimensions of the state and control variables,respectively.Therefore,with the increasing length of the prediction horizon, the complexity grows quickly. (2)Unlike a numerical algorithm, the proposed method translates the original optimal problem into a nonlinear equation,that is, finding the optimalλ2(1)making the terminal conditionΓ(λ2(1)) <∈. Benefiting from this, the influence of the length of the prediction horizon is not the dimension of the problem. 3) Furthermore, at every time step,with known states {x(k),λ2(k)}, the optimal inputs can be obtained explicitly using (18) and (19), which can greatly accelerate the calculation process fromλ2(1)toΓ(λ2(1))and reduce the influence of the prediction horizon.
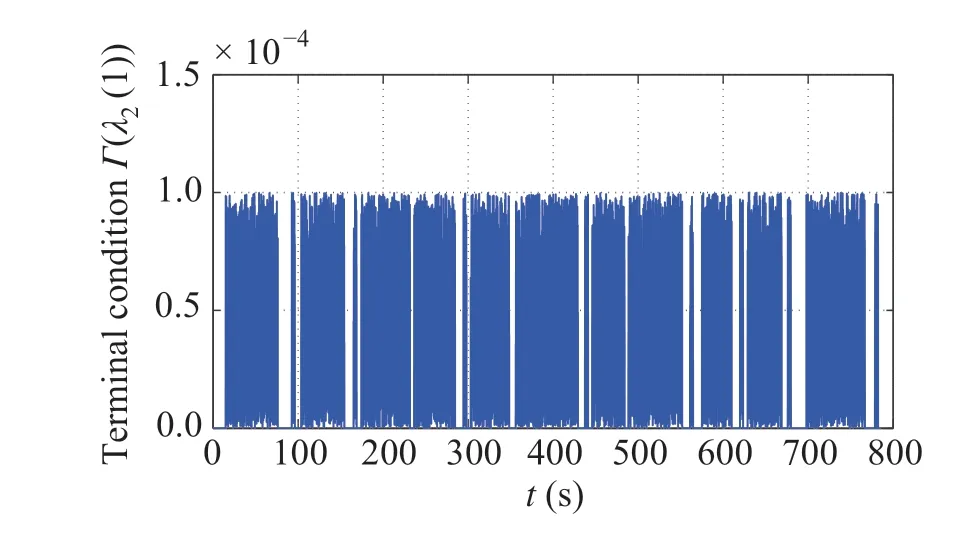
Fig.8 Computational accuracy of the proposed method
6 Conclusions
In this paper,a hierarchical real-time energy-efficient anticipative driving control strategy for a connected and automated hybrid electric vehicle(HEV)is proposed.In the higher-level controller,with the predicted traffic information,the highly energy-efficient anticipative driving of a connected and automated HEV is realized by proactively optimizing the vehicle speed. In the lower level controller, an explicit solution of the optimal torque split ratio and gear shift schedule is introduced for following the energy-efficient velocity trajectory.The important findings in this research are detailed as follows:
(i) Benefiting from the precise traffic prediction, the proposed energy-efficient anticipative driving control strategy can effectively achieve approximately 13%fuel consumption saving compared with a traditional ACC strategy.(ii) The results of computational efficiency reveal that the proposed strategy has the potential of real-time application.
Futureworkswillfocusontherealvehicleimplementation of the proposed energy-efficient anticipative driving control strategy.
Appendix A:Convergence analysis

杂志排行
Control Theory and Technology的其它文章
- Recent advances on micro-control for near-critical complex systems
- Special issue on on-board optimization strategy design methods for connected hybrid electric vehicles
- Real-time energy management strategy based on predictive cruise control for hybrid electric vehicles
- A hybrid genetic algorithm for the electric vehicle routing problem with time windows
- Fuel consumption reduction effect of pre-acceleration before gliding of a vehicle with free-wheeling
- Optimization of fuel consumption and NOx emission for mild HEV via hierarchical model predictive control