Real-time energy management strategy based on predictive cruise control for hybrid electric vehicles
2022-07-06XiongxiongYouXiaohongJiaoZeyiWeiYahuiZhang
Xiongxiong You·Xiaohong Jiao·Zeyi Wei·Yahui Zhang
Abstract With the help of traffic information of the connected environment,an energy management strategy(EMS)is proposed based on preceding vehicle speed prediction, host vehicle speed planning, and dynamic programming(DP)with PI correction to improve the fuel economy of connected hybrid electric vehicles (HEVs). A conditional linear Gaussian (CLG) model for estimating the future speed of the preceding vehicle is established and trained by utilizing historical data. Based on the predicted information of the preceding vehicle and traffic light status,the speed curve of the host vehicle can ensure that the vehicle follows safety and complies with traffic rules simultaneously as planned.The real-time power allocation is composed of offline optimization results of DP and the real-time PI correction items according to the actual operation of the engine.The effectiveness of the control strategy is verified by the simulation system of HEVs in the interconnected environment established by E-COSM 2021 on the MATLAB/Simulink and CarMaker platforms.
Keywords Connected HEVs·EMS·Gaussian model prediction·Speed planning·DP
1 Introduction
Since the first HEV was launched into the automotive market in 1997,HEV has been widely known as a green-energy
This work was supported by the National Natural Science Foundation of China(No.61973265),the Natural Science Foundation of Hebei Province(No.E2021203079)and the Scientific Research Foundation for the Returned Overseas Chinese Scholars,Hebei Province(No.
C20210323).car. The HEV is a vehicle powered by a combination of battery-electric motors and an internal combustion engine.This combination enables the combustion engine to operate in the most efficient and green operating area and preplan the energy flow according to the driving route. During the last 2 decades, many kinds of research have been reported to explore the potential of HEVs in energy savings. From the view of powertrain control and management technology, the critical issue is the EMS that is implemented in the onboard control unit and delivers the commands to the power sources of the powertrain according to the state of the powertrain and the power demand of the driver[1].However,most studies that addressed this issue from system control are preplanning-based optimization schemes that seek the solution for optimal energy consumption under the assumption that the power demand profile of the whole driving route is previously known [2]. Although real-time optimization has been focused on many attentions that challenge the energy consumption optimization problem without complete preinformation in[3],there still exists a gap between the onboard optimization technology and that used in mass production HEVs.
A bottleneck to fill this gap is the variety and uncertainty in the future power demand of driving trips. However, it is necessary to solve the energy consumption minimization problem with the existing methods proposed in the literature.Therefore,further challenges in the real-time optimization of energy consumption are still an open issue in the power-train control community. A new milestone is greatly anticipated by breaking the automotive industry’s bottleneck, and the energy system’s academic community and optimization[4].Fortunately, the connectivity progress recently provided an ample opportunity in developing innovative technology of onboard optimization of energy consumption,since the realtime communication between vehicle-to-vehicle(V2V)and vehicle-to-infrastructure (V2I) provides the possibility in seeking the optimal solution [5]. The framework of vehicles in the connected environment is sketched in Fig.1.The latest development of intelligent transportation systems(ITSs)shows that V2V and V2I communication systems can improve the accuracy of the prediction model and HEV driving performance[6].
Indeed, many attempts have been reported to solve the above problems using the V2X communication system.For example, in the nonlinear model predictive control (MPC)proposed in [7], a Markov chain demand prediction model was established using the preceding vehicle’s driving cycle information to form a multi-objective optimization problem considering safety and fuel economy. In [8], based on the demand torque prediction of the vehicle, a two-stage optimization scheme including long-term offline and short-term online optimization is proposed. The former deals with the optimalmodeswitchingandenginepowerofthewholeroute,while the latter uses the short-term local optimization method of the backward horizon to optimize the actual route.In[9],a vehicle speed prediction model based on driving pattern recognition and Markov chain is proposed to solve the difficulty of vehicle speed prediction caused by the uncertainty of vehicle speed and driving environment. In the case that the vehicle can hardly be decoupled from the traffic flow,a multi-feature predictor based on a long and short-term memory(LSTM)network is used to predict short-term speed[10].Fu et al.[11]studied the distributed optimal energy consumption control strategy under the speed consensus based on the average field game.The acceleration control law is designed using mean-field game(MFG)theory.
Based on these prediction models,the fuel-saving potential of HEVs, rule-based and optimization-based EMSs is usually used to optimize the control variables.In[12],fuzzy logic and Elman neural network-based adaptive EMS in an HEV are designed and implemented.A hybrid Eco-Driving algorithm based on reinforcement learning considering the longitudinal acceleration/deceleration is developed in[13].A deep deterministic policy gradient algorithm is designed to learn the continuous longitudinal acceleration/deceleration to reduce fuel consumption.
An MPC framework for HEVs is established in [14]in the car following scenario to study fuel economy. The MPC-based controller optimizes vehicle speed and engine torque to achieve better fuel economy while ensuring straddle safety. Zhang et al. [15] proposed a two-level control system of MPC for HEVs with available traffic information.After expressing the path planning problem as a nonlinear optimization problem,real-time vehicle acceleration is generated.The sequential quadratic programming(SQP)method is used to solve the energy control optimization problem to improve fuel efficiency. A fuzzy adaptive approach based on Pontryagin’s Minimum Principle(PMP)optimal strategy using real-time traffic information is proposed in[16].This method has advantages in improving vehicle fuel economy andmaintainingbatterychargingsustainabilityundervarious driving cycles.In[17],an equivalent consumption minimization strategy (ECMS) control strategy for parallel HEVs is proposed.Lietal. [18]further proposed an adaptive ECMS to automatically modify the fuel equivalence factor based on cycle forecasting for HEV energy management. This control strategy takes into account engine efficiency to optimize the overall fuel economy of the vehicle. Based on the typical control concept of HEVs, Jeoung et al. [19] proposed a rule-based HEV energy management control method that determines the optimal control parameters through the optimization process to achieve the goal of improving engine fuel efficiency.
Numerous methods have been proposed targeting at the energy management problem, which can be divided into two groups: rule-based and optimization-based ones [20].In[21],the strategies are further classified into offline global optimization and online sub-optimal control. However, the optimization-based energy management strategy has a heavy computational burden,and it is challenging to guarantee realtime performance[22].The adaptability of rule-based energy management strategy needs to be improved[23].
Based on the above analysis, this paper investigates an EMS consisting of preceding vehicle speed prediction,host vehicle speed planning, and dynamic programming (DP)with PI correction to improve the fuel economy of connected HEVs.First,the CLG model is used to predict the velocity of the preceding vehicle.In the prediction model,in addition to the position and speed of the preceding vehicle,information provided by V2V and V2I communication systems,such as future traffic light signals and status, are also included to improve the assessment of traffic conditions. Based on this information, the velocity of the preceding vehicle can be predicted reasonably. Then, the predicted trajectory is incorporated into an adaptive cruise controller(ACC)to provide reasonable demand power according to safety and traffic rules.After that,a real-time EMS for HEVs based on the DP framework is proposed,where the power allocation is composed of the offline optimization result of DP and a real-time
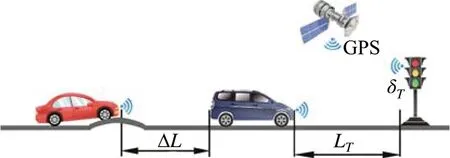
Fig.1 Schematic of vehicles under connected environment
PI correction item according to the actual operation of the engine. Finally, the effectiveness of the control strategy is verified by the simulation system of HEVs in the interconnected environment established by E-COSM 2021 on the MATLAB/Simulink and CarMaker platforms.
2 Energy management control problem-oriented model of targeted HEV
In this paper, an HEV model is considered as the plant for designing and implementing a real-time energy management control strategy, but the EMS presented is not limited to this particular HEV type and can be applied to other HEVs.Moreover,this section only offers the HEV model used for the design of the EMS. The HEV model in the connected environment used for the simulation experiment, provided by E-COSM 2021,includes the power-train dynamic model and the static efficiency characteristic diagram of the power source, to more effectively evaluate the performance. The designed energy management control strategy is in Sect.3.
As shown in Fig.1,δTis the status of the traffic light,LTindicates the distance between the preceding vehicle and the traffic light,and the actual headway distanceΔLcan be defined as follows:
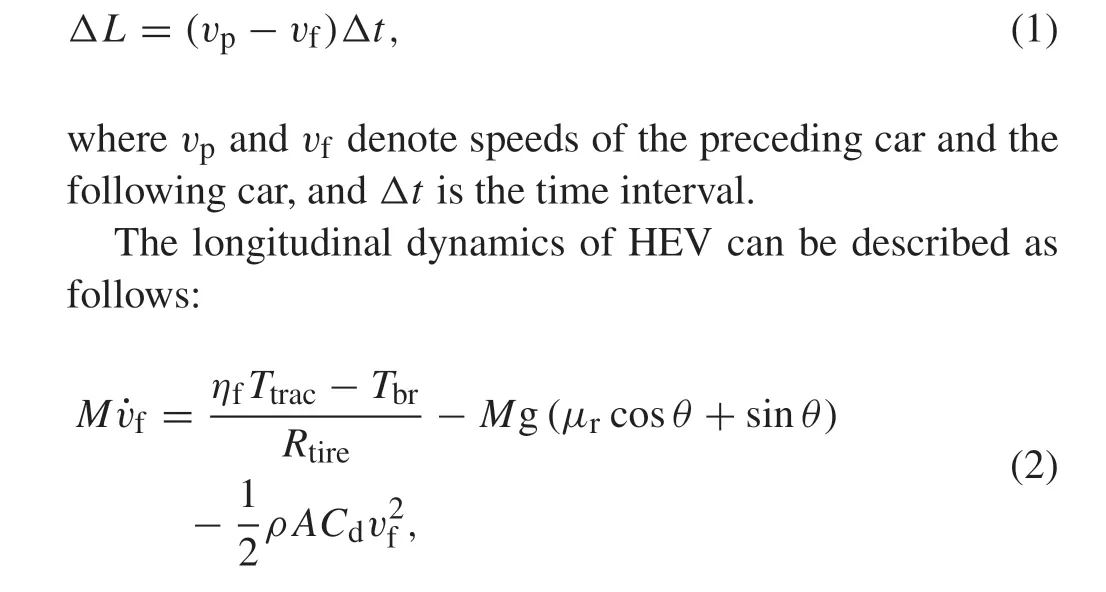
whereMis the vehicle mass.TtracandTbrmean traction and friction braking torque.ηf,μrandρrepresent transmission efficiency of differential gear ratio,rolling resistance coefficient and air density, respectively.θdenotes road slope.A,CdandRtiremean vehicle windward area,air drag coefficient and tire radius,respectively.
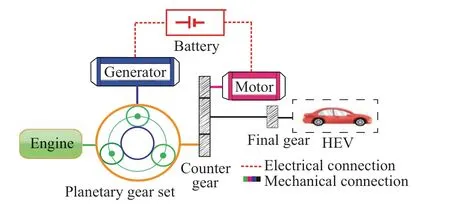
Fig.2 The structure of power-spilt HEV
The simplified architecture of the considered HEV with a planetary gear-based hybrid system is shown in Fig.2. The HEV works more flexibly than series and parallel HEVs,which have four typical working modes, including pure electric-driving mode,engine-driving mode,hybrid driving mode, and regenerative mode. The energy distribution and mode switching of the HEV can be realized by the mechanical connections between the planetary gear set and three power sources,including the engine,motor,and generator.It is assumed that there is no energy loss between gears while running the vehicle and switching driving modes.Moreover,the dynamics of three power sources are described as follows:
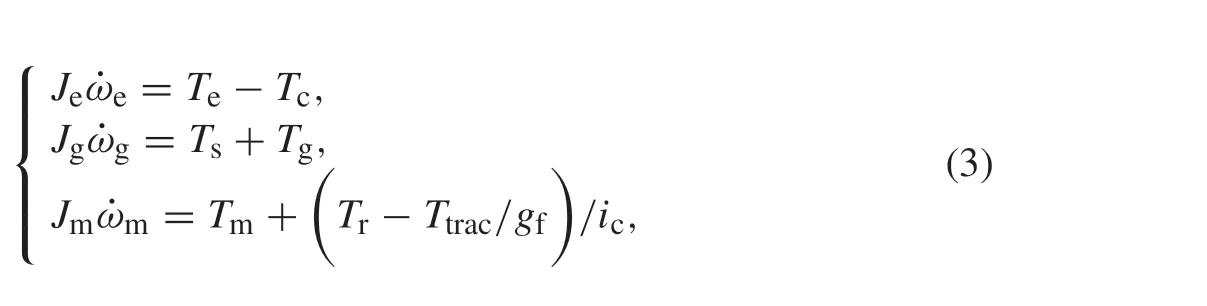
where the foot subscripts e, m and g denote engine, motor and generator,the foot subscripts c,s,r mean the carrier,sun and ring gears of the planetary gear set.Jis the moment of inertia.ωandTare rotational speed and torque.gfis the differential gear speed ratio.icis the counter gear speed ratio.
To make the engine work in the optimal working curve is an important premise to ensure fuel economy,so it is necessary to fit the best efficiency curve of the engine in advance as shown in Fig.3. BSFC represents the fuel consumption rate of the engine.The optimal curve represents the best efficiency curve of the engine.
The fuel consumption is selected as a target of fuel economy during designing the control strategy for HEV,which is evaluated by the fuel mass flow rate ˙mf(g/s)described as

where BSFC is obtained from a 3-D map of torque and speed characteristics for a certain engine,as shown in Fig.4.
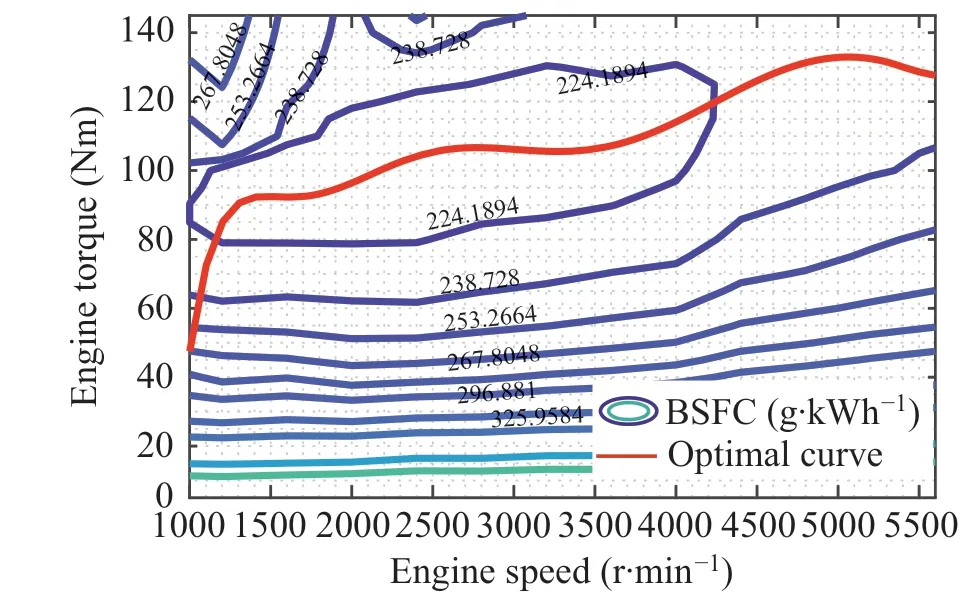
Fig.3 Engine universal characteristic diagram
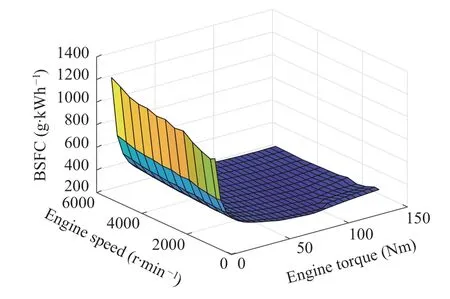
Fig.4 BSFC map of a gasoline engine
The dynamic equation of battery SOC can be written as
whereUoc,Rb,PbandIbare open circuit voltage, battery equivalent resistance, battery power and battery current.ηi(i=m,g)represents the energy transfer efficiency of motor and generator,respectively.Tiωi >0(ki= -1),Tiωi <0(ki= 1)indicate that the battery is in a state of discharge and charge,respectively.
It is worth mentioning that the open-circuit voltage and the battery’s intern al resistance are generally dependent on both SOC and temperature,but in the design of the EMS,the effect of temperature can be ignored.Therefore,VocandRbcan be obtained from the maps to SOC as shown in Fig.5, for the battery with certain specifications at the average operating temperature.
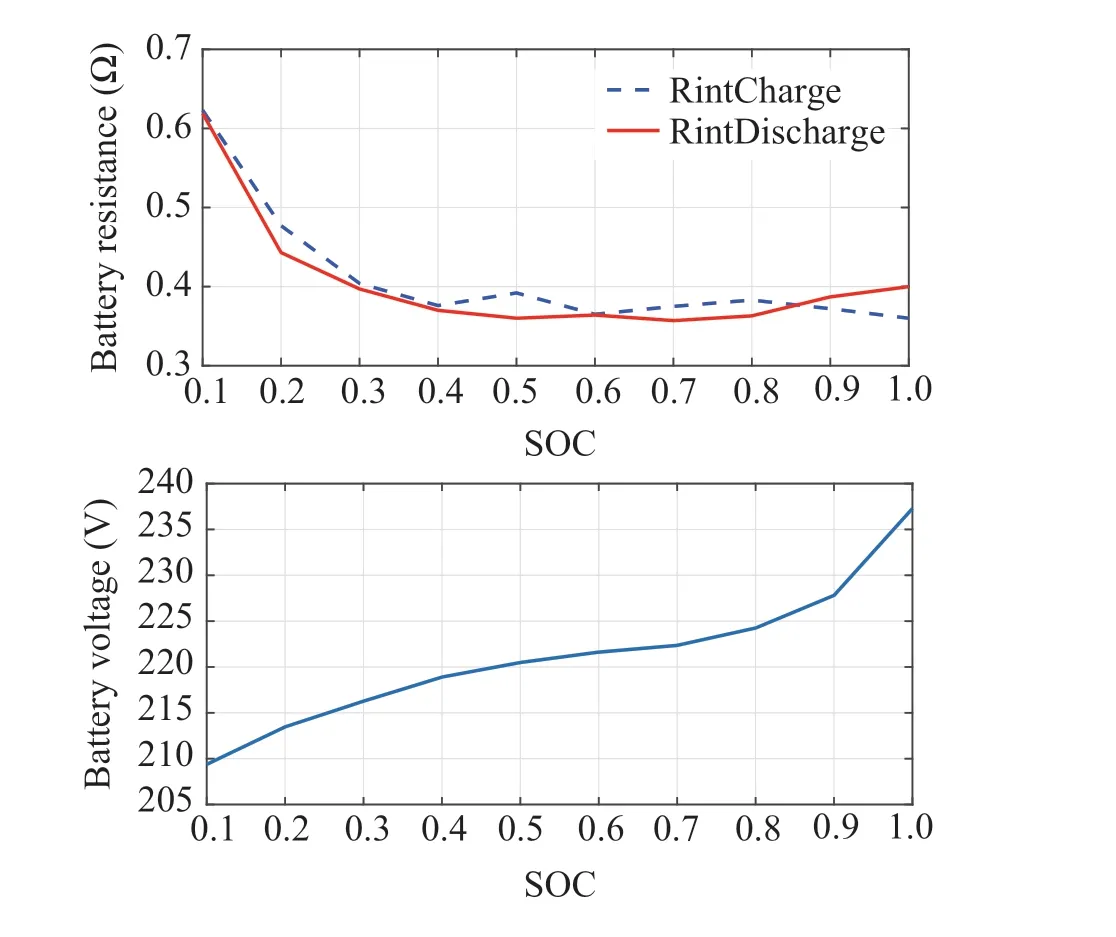
Fig.5 Maps of the open circuit voltage and the internal resistance
3 Real-time EMS design
For HEVs driving on a given fixed route, road conditions and a fixed distance can be determined,although there will be some uncertain driving conditions. Therefore, to realize real-time and economical energy management, this paper proposes a real-time EMS of connected HEVs.
The structure of the real-time EMS is shown in Fig.6,which includes two parts:an offline part and an online part.In the offline part, the historical cycle data are optimized by the DP algorithm,and the optimization result of DP will be used as the main term of power allocation for real-time EMS as shown in Fig.7.The online part,as shown in Fig.8,includes a CLG-based prediction model, ACC-based HEV speed planning, and DP-based EMS. The CLG model predicts the preceding vehicle’s speed using the traffic light status and the historical speed information. Then, the host vehicle speed is planned according to the ACC control strategy, and the desired speed is converted into the required power according to the vehicle’s longitudinal dynamics.On this basis,the DP-based EMS is designed to split the required power.Based on the optimal working curve of the engine and PI controller,the distributed engine power and battery power are converted into the torque of each power source.
In view of fuel economy, the energy management optimization cost function is given as
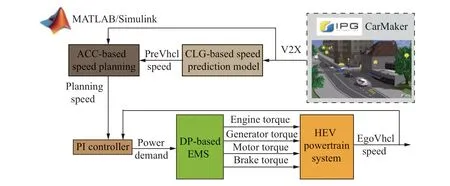
Fig.6 Schematic of CarMaker and Matlab/Simulink simulation test platform for HEVs
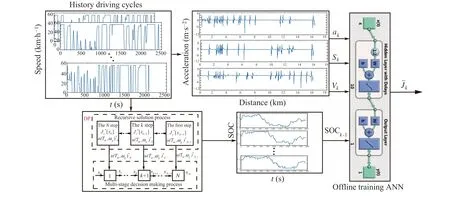
Fig.7 Sketch of ANN offline training process
under the following constraints
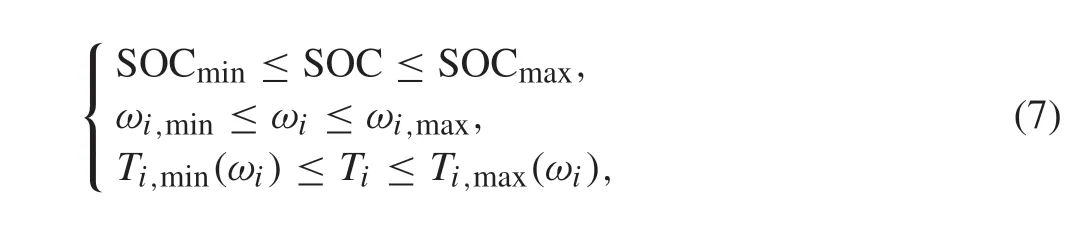
whereλistheweightingfactor,i=m,g,e.“max”and“min”represent the maximum and minimum values of the current index value, respectively. SOC0, SOCtandtfrepresent the initial value of SOC,the value of SOC at timetand the time when the journey ends.
3.1 CLG-based prediction model
In this paper, a CLG model, a particular variant of the Bayesian network, is used to predict the preceding vehicle’s longitudinal speed directly.The advantage of this model is that a joint distribution over all variables models the time series of the velocity. As shown in Fig.9, squared nodes represent discrete variables,and round nodes represent continuous-valued variables. Shaded nodes are CLG distributions and describe the future velocity trajectory.Moreover,because of the linear correlation,the amount of data required by the model to estimate the parameters is less than that of the Markov model. It is assumed that the data and traffic information obtained are entirely accurate.The input vector of the model is expressed as
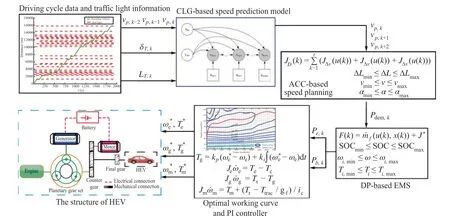
Fig.8 Diagram of online implementation of the designed EMS
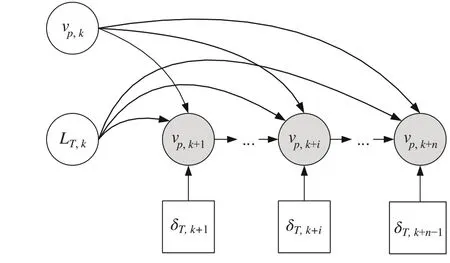
Fig.9 CLG prediction model
where each elementvp,k+iis a 1-D Gaussian distribution with mean and variance,that is

3.2 ACC-based HEV speed planning
Aiming at the vehicle following the safety of HEV in this case,the cost function is constructed by combining the safety constraints,traffic rules,and physical constraints of the host vehicle.

whereJΔLis the loss function of relative distance,JΔvandJΔadenote the loss functions of relative speed and relative acceleration,tprepresents the prediction horizon,u(k)is the control variable at timek, representing the acceleration of the host vehicle.During the timetp,the acceleration of the host vehicle is assumed to be a constant value.
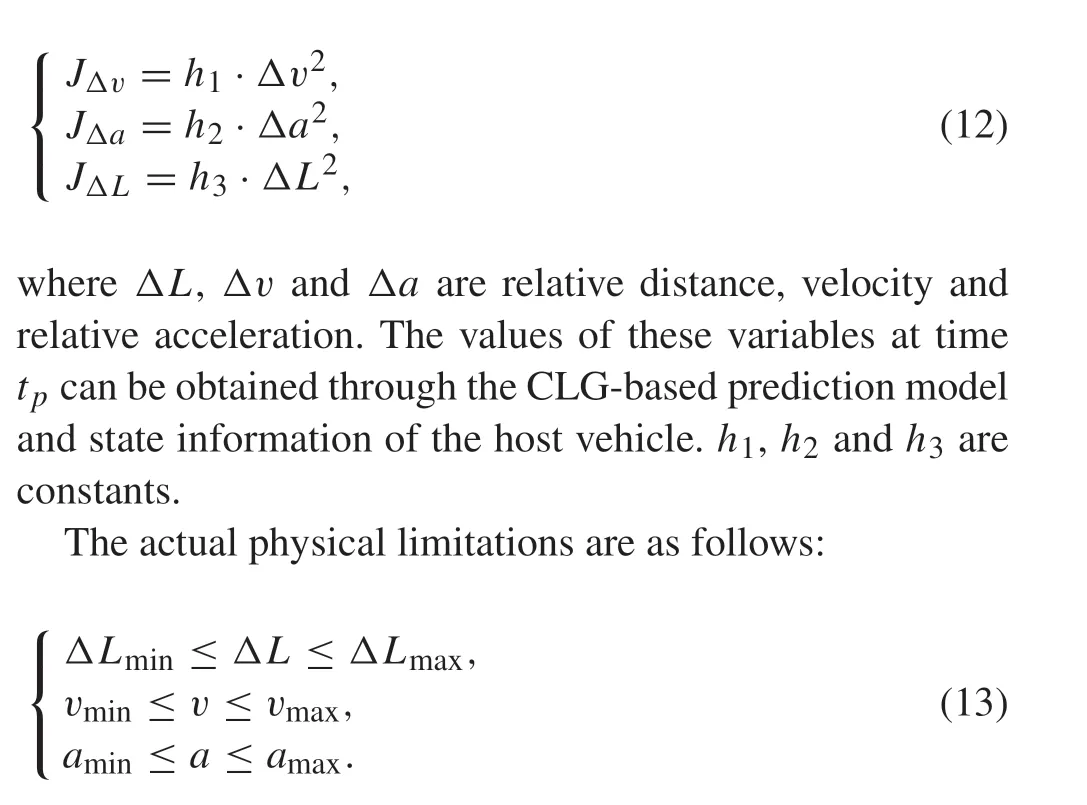
Moreover, the minimum vehicle headwayΔLminand maximum headwayΔLmaxbetween two vehicles can be defined according to the following safety[7],shown as follows:

where constantsαi,i= 1,2,3 andβi,i= 1,2,3,the constant setting here refers to[7].
When a vehicle approaches a traffic light intersection, it is necessary to redefine the speed limits of the host vehicle according to the corresponding traffic rules,approximate distanceLTto the next traffic light,time sequence,and phase sequence of traffic lights[24].Supposegiis the start of theith green of the next traffic light,andriis the start of theith red of the next traffic light,for example,the subsequent light broadcasts,at regular intervals,a sequence

For the host vehicle to pass during the first green of the first light,its velocity should be in the interval[LT/r1,LT/g1].It is only feasible if this interval has a set intersection with the possible speed interval of[vmin,vmax].If this set intersection is empty, passing through the first green without stopping at red is deemed infeasible. In that event, the feasibility of passing during the next green interval is checked.
3.3 DP-based EMS
In Fig.7,the training samples of the artificial neural network(ANN)are obtained by global optimization processing of the historical cycle condition information of the road section, ~Jis the approximate value of the cost function,and is the main term of the real-time power distribution.It is used to obtain an approximation function.
The DP method is applied to obtain the minimum of equation (6), but it lacks real-time performance and is prone to unsatisfactory states due to different environments.To apply the optimal result online,the corresponding cost estimate is obtained by the ANN model. The real-time instantaneous cost function is set as

where ~Jis the cost function for distanceL, velocityv,accelerationaand statex,and ˙m fis the instantaneous fuel consumption.

Fig.10 Map showing the location of the road obtained from Google Maps
4 Simulation results and discussion
In this section,simulation results obtained by the given simulator will be presented to validate the effectiveness of the proposed EMS.Ten sets of traffic data in the E-COSM 2021 benchmark are given through commercial traffic scenario simulation software. It should be noted that we arbitrarily selected two sets of data to verify the effectiveness of this strategy.
The targeted road is shown in Fig.10, which is a montane town area,and a white line highlights the running route.Automotive road tests obtain the data of height and slope along the route, and the profiles are shown in Fig.11. The position and status of the traffic lights on the fixed road are shown in Fig.12.When the departure and destination points in the road for the ego vehicle are determined,the slope and position of the intersection along the road can be pre-known through GPS information.
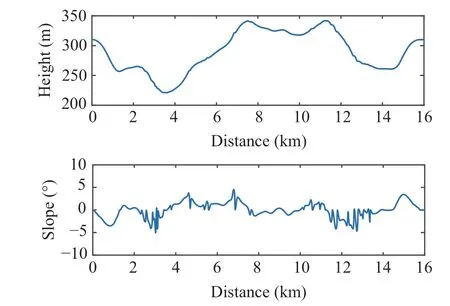
Fig.11 The height and slope information of the road
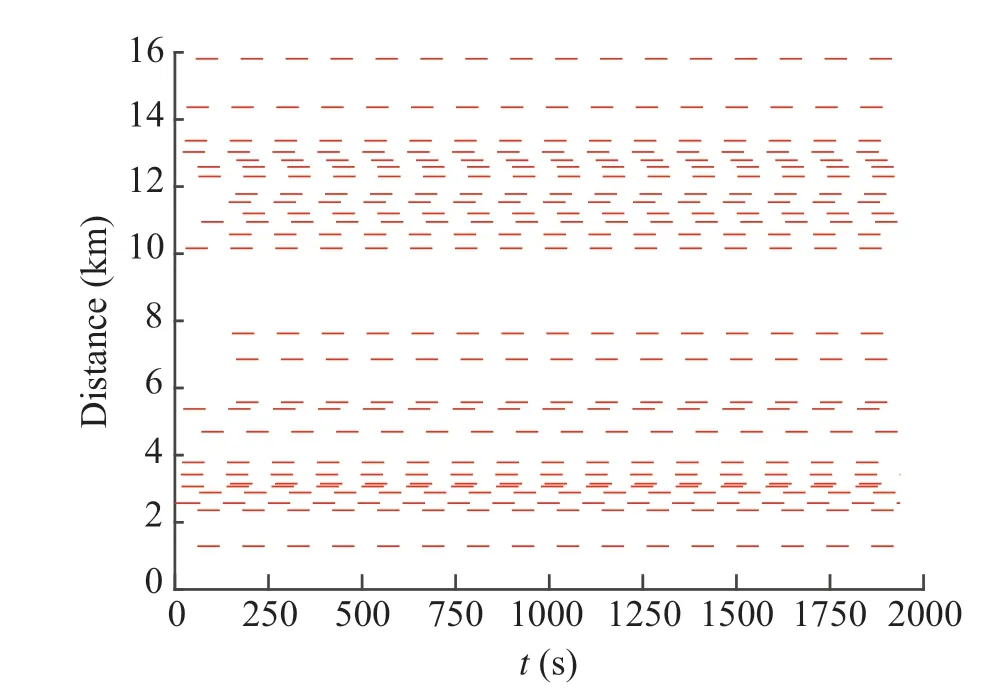
Fig.12 Diagram of traffic light timing-distance
The prediction model is evaluated using a separate evaluation cycle.Note that the model is evaluated in a receding horizon manner. Therefore, the longer the prediction horizon is adopted, the more prediction error will accumulate.The resulting prediction performance for different prediction horizons is shown in Fig.13. The predicted value and the accompanying inputs are illustrated in Fig.14. As seen from the above,the prediction model is reasonable.
First, to verify the effectiveness of the proposed strategy, the first set of speed curves used in the training set is selected as an actual driving cycle for simulation.The simulation results, including speed of vehicles, torques of the engine,generator and motor,speed of the engine,generator and motor, fuel consumption, SOC, are shown in Figs.15,16,17 and 18,respectively.
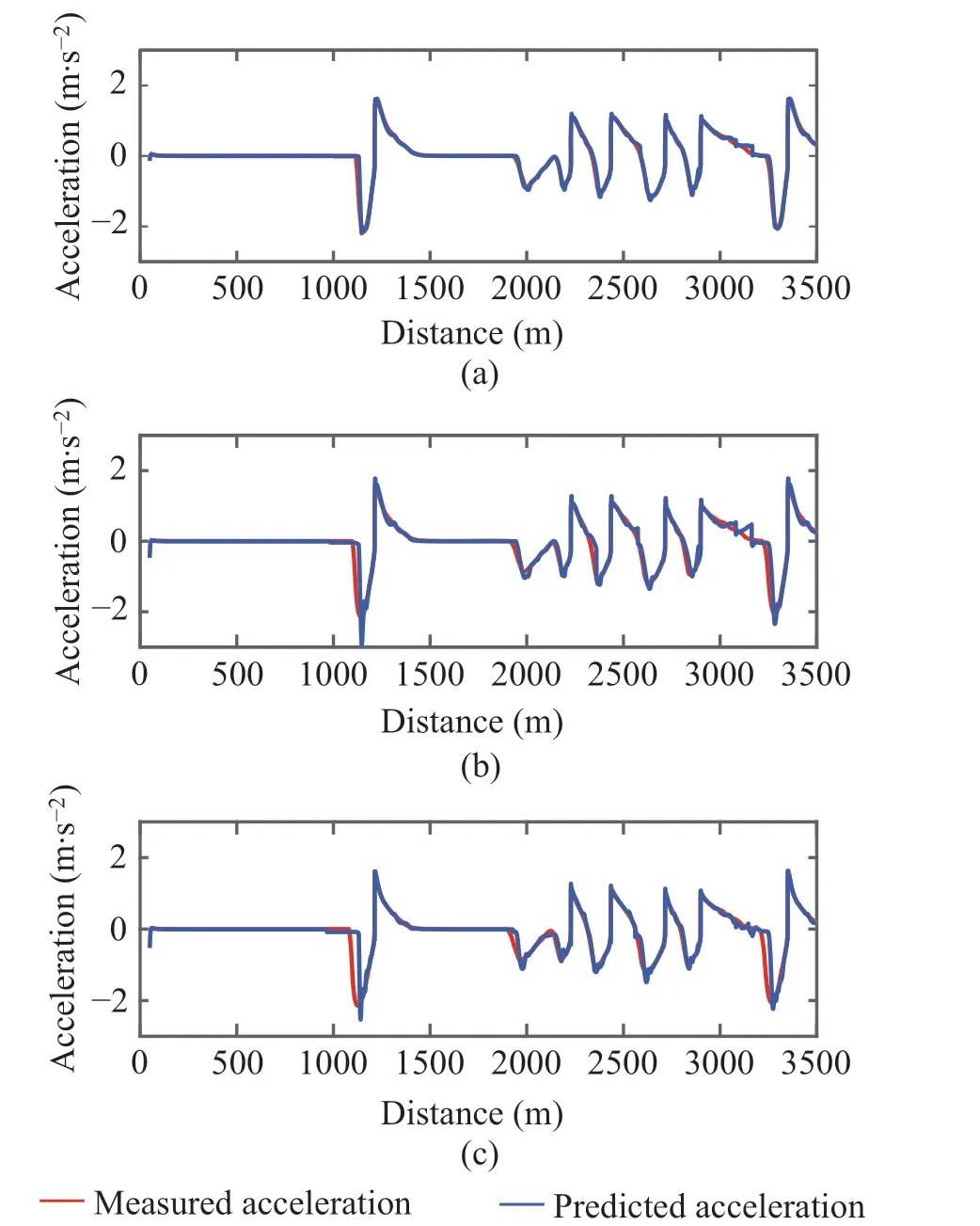
Fig.13 Predicted acceleration for different horizons
The simulation result figures show that the preceding vehicle and the host vehicle maintain a safe distance and a specific speed difference.In addition,the economic improvement of the proposed control strategy under various driving cycles is illustrated. Some comparative analysis was established between the proposed strategy and the MPC strategy proposed by E-COSM as shown in Fig.19.Hence,it is concluded that the proposed energy management strategy can satisfy vehicle-following safety while ensuring compliance withtrafficrules.Therelationshipsbetweenenginespeedand torque,and between power demand and powers of the engine,generator,and motor are all matched.The E-COSM provides formula(6)as the final goal.This formula calculates the test scores.The vehicle under the control of this strategy meets the safety index(safety distance,traffic light rules,maximum speed limit, and other indicators are proposed in [25]), but the test score is lower than the score given by[25].Therefore,the proposed control strategy effectively implements online the reduction of fuel consumption and good drivability in the driving environment.
Secondly, to verify the applicability and universality of the proposed strategy,the fifth set of speed curves provided by E-COSM was used in the simulation experiment.
Figure20 shows speed curves of the preceding vehicle and host vehicle. Figure21 shows the torque of the engine,generator, and motor. Figure22 shows the rotational speed of the engine,generator,and motor.Figure24 shows the test score of two control strategies. These figures show that the relationship between the torque and rotational speed of the engine, generator, and motor matches the proposed distribution strategy and conforms to the physical characteristics.Hence,it is concluded that the proposed energy management strategy can satisfy vehicle-following safety while ensuring compliance with traffic rules and reduced fuel consumption.
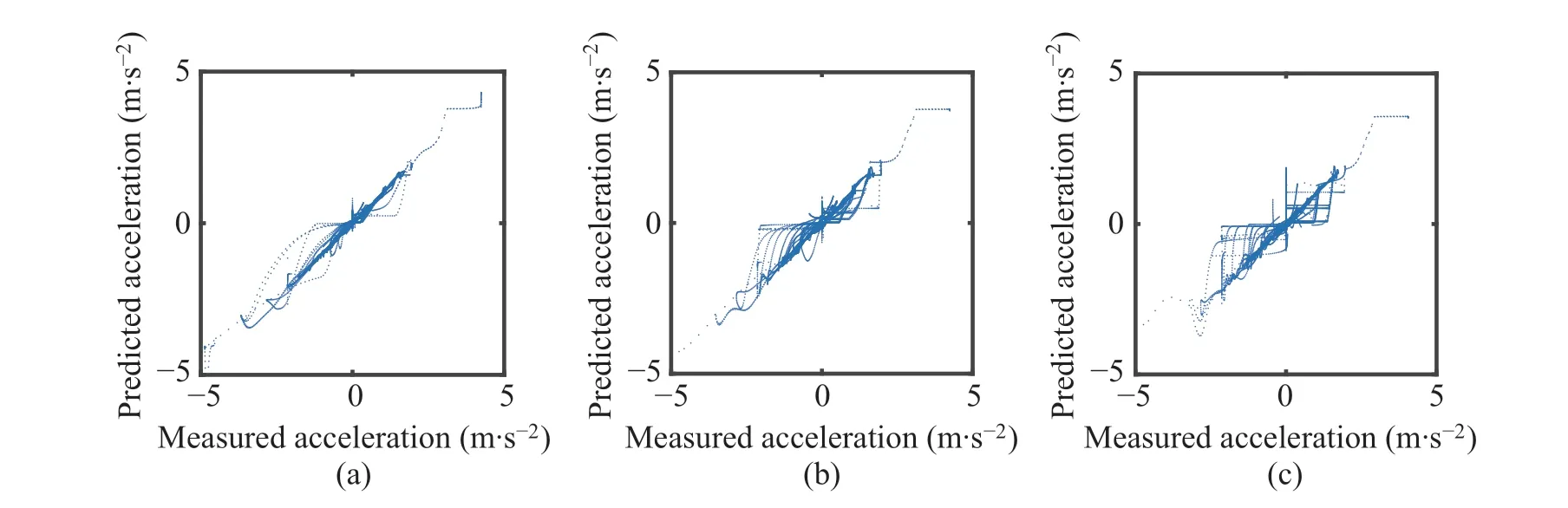
Fig.14 Predicted acceleration and measured acceleration
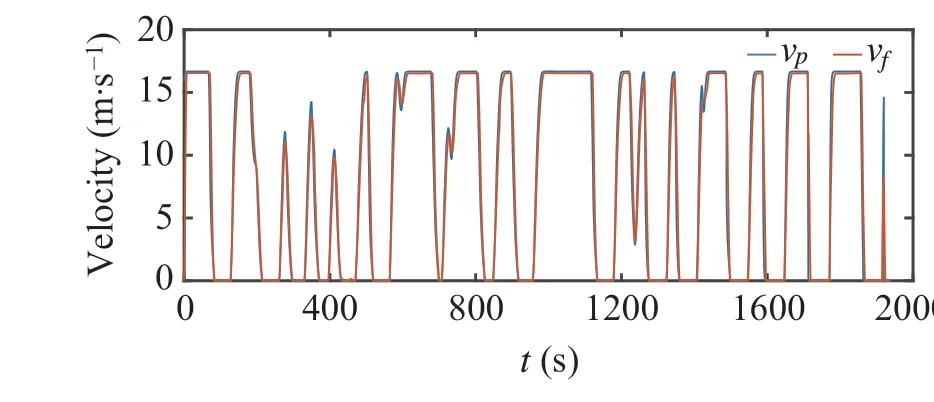
Fig.15 Velocity curve of vehicles under the first set of data
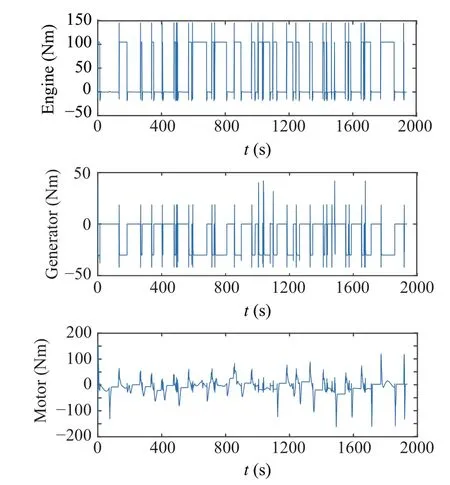
Fig.16 Torques of engine, generator and motor under the first set of data
It can be concluded that the proposed control strategy applies to the driving conditions in the data set under the premise that the formula (6) proposed by E-COSM is used as the evaluation index(E-COSM also provides the weighting factor).
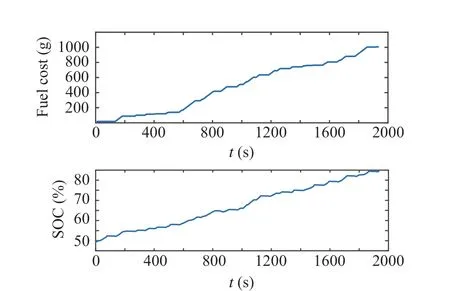
Fig.18 The curves of fuel and SOC under the first set of data
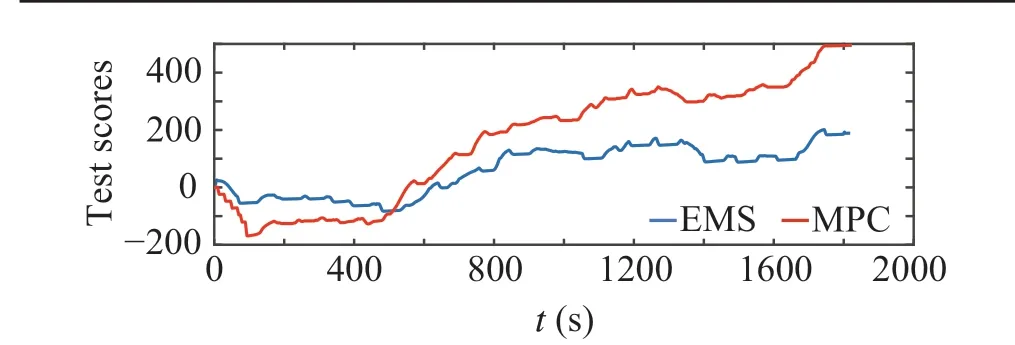
Fig.19 Comparative analysis during the driving cycle of the first set
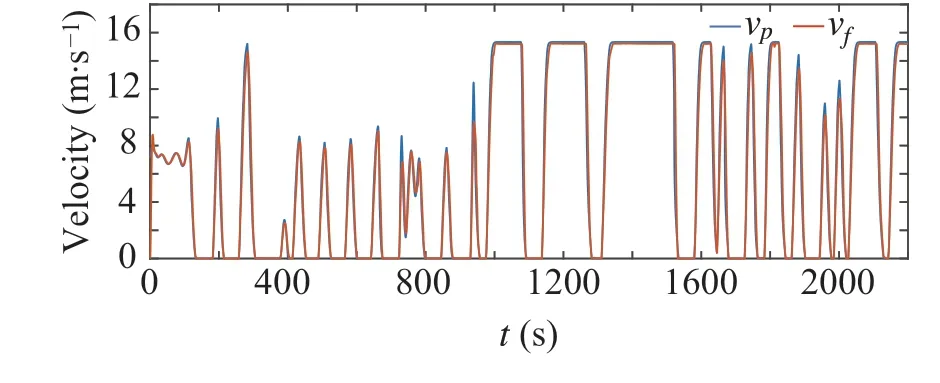
Fig.20 Velocity curves of vehicles under the fifth set of data
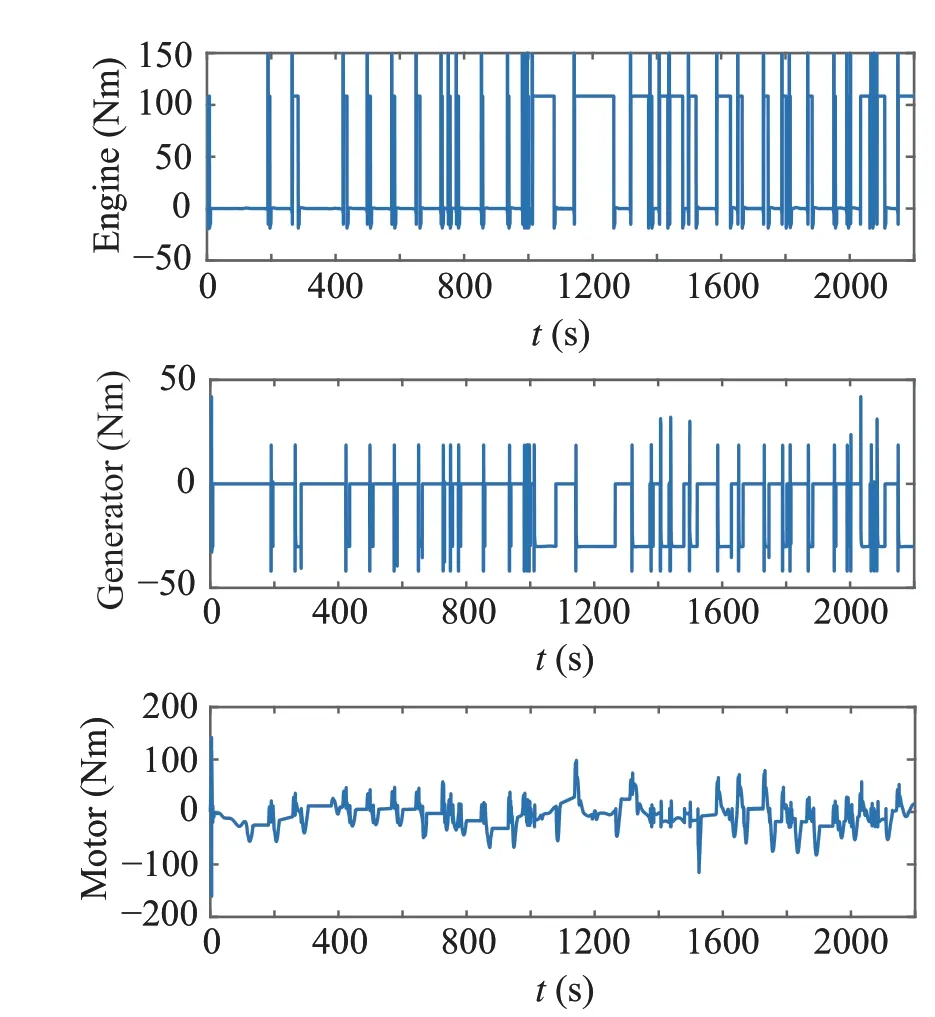
Fig.21 The torques of engine,generator and motor under the fifth set of data
5 Conclusions
This paper proposes a real-time EMS optimal control power system based on V2X information, a CLG-based vehicle speed prediction model,ACC-based vehicle speed planning,and a DP-based power split strategy into the main design,forming a novel real-time energy management control strategy. A simulation system verifies the effectiveness of the EMS in the connected environment of HEVs based on MATLAB/Simulink and the CarMaker platform.
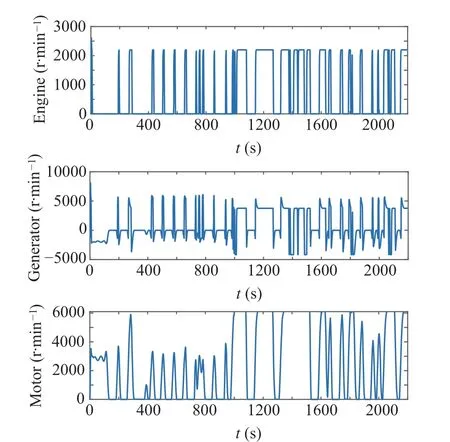
Fig.22 The speeds of engine,generator and motor under the fifth set of data
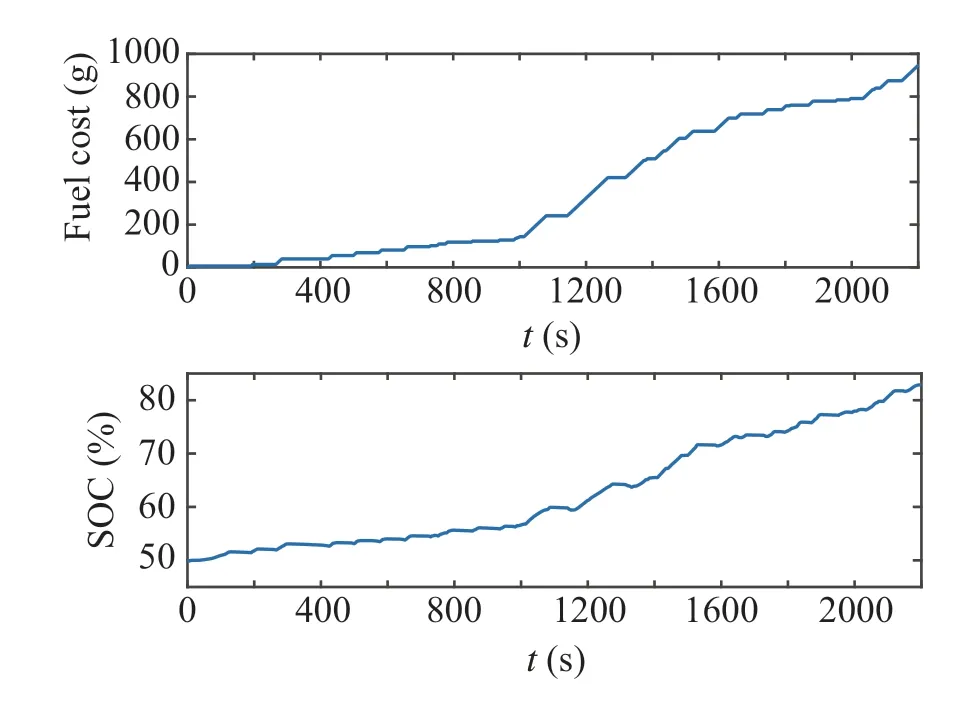
Fig.23 The curves of fuel,SOC and test scores under the fifth set of data
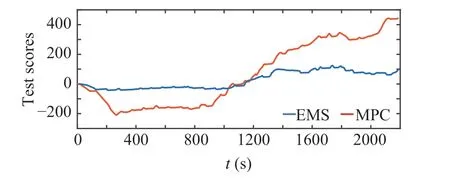
Fig.24 Comparative analysis during the driving cycle of the fifth set
The simulation results indicate that the designed EMS is efficient and reasonable to ensure safety and comply with traffic rules. Meanwhile, the simulation results confirmed that the designed EMS possesses real-time implementation in practice and can achieve the improvement of fuel economy.The overall evaluation score is reduced by 350 compared with the evaluation score in this case.In this paper,only the driving cycle data provided by the E-COSM are used.In the future, a variety of driving cycle data will be considered to enhance the adaptability of the control strategy.
杂志排行
Control Theory and Technology的其它文章
- Recent advances on micro-control for near-critical complex systems
- Special issue on on-board optimization strategy design methods for connected hybrid electric vehicles
- Real-time energy-efficient anticipative driving control of connected and automated hybrid electric vehicles
- A hybrid genetic algorithm for the electric vehicle routing problem with time windows
- Fuel consumption reduction effect of pre-acceleration before gliding of a vehicle with free-wheeling
- Optimization of fuel consumption and NOx emission for mild HEV via hierarchical model predictive control