固旋翼垂直起降混电飞行器推进系统设计
2022-07-04宗建安朱炳杰侯中喜杨希祥
宗建安,朱炳杰,侯中喜,杨希祥
国防科技大学 空天科学学院,长沙 410000
固定翼垂直起降式飞行器结合了固定翼(Fixed Wing,FW)和旋翼的优点,适用于更多的飞行场景(垂直起飞、过渡、巡航和垂直着陆等),是飞行器设计的新趋势。随着电池技术的高速发展,全电推进技术有望在航空业有更为广泛的应用。与传统内燃机(Internal Combustion Engine,ICE)推进不同,全电推进可以降低维护需求,有更高的效率、更少的排放以及更小的噪声。全电推进技术催生了新的分布式推进(DP)的概念,这是由于全电推进独有的尺寸独立性优势,即允许小电机被平行化以用于故障安全的冗余,或者分布在机身上,用于紧密耦合的跨界功能,而无显著的效率和重量的变化。全电推进技术的另一个重要特征是为垂直起降飞行器提供了更自由的设计架构,以提高飞行器短期动力和改善飞行器气动特性。
电池能量密度研究进展非常缓慢(平均每年8%),受限于当前的电池能量密度,纯电动飞机很重,混电推进更具潜力,可首先应用于小型飞行器以改善其续航、载重能力等。混电系统将发动机和电动机(Electric Motor,EM)结合在一起,实现独特的推进架构,利用较高能量密度燃油和更高效的电能转换来达到更高效的能量利用率。此外,电推进部件为飞行器和推进系统的设计带来了更多灵活性,与固定翼垂直起降飞行器的结构和飞行工况耦合得很好。在电池能量密度得到突破前,应用混电系统在提升固定翼垂直起降式飞行器方面有巨大潜力。美国国家航空航天局的Fredericks等研究了4种固定翼垂直起降飞机的概念,指出对于具有长续航能力和垂直起降能力的飞行要求,混电系统优于传统推进系统。目前对混电飞行器的研究主要集中在通用航空飞机上,对于固定翼垂直起降飞行器的总体设计研究主要集中在纯电动驱动方式。固定翼垂直起降飞行器与混电系统的结合研究相对较少。德国亚琛工业大学的Finger等给出了通用混电航空飞机的尺寸初步确定方法,是一种经典的迭代方法。韩国建国大学Tyan等和北京航空航天大学唐伟等则针对纯电动固定翼垂直起降飞行器进行了总体设计,这些研究对固旋翼垂直起降混电飞行器推进系统提供了很好的参考,但对于固旋翼垂直起降混电飞行器推进系统的设计需要进一步研究。
在众多固定翼垂直起降飞行器结构中,尾座式垂直起降、倾转旋翼式垂直起降、固旋翼垂直起降是最常见的设计。目前,对于尾座式垂直起降和倾转式垂直起降飞行器,在效率、成本和工程实践上都存在很大的缺陷。固旋翼垂直起降飞行器的优点是具有优异的垂直起降性能及高速飞行能力,兼具转换过渡稳定、可控性强的特点,固旋翼垂直起降飞行器示意图如图1所示。
为了解决固旋翼垂直起降混电飞行器推进系统的设计问题,本文基于通用混电航空飞机和纯电动固定翼垂直起降飞行器初始参数确定方法,提出针对固旋翼混电垂直起降飞行器推进系统的设计流程和方法,得到推进系统的具体设计参数,分析比较不同优化目标下的设计结果,以期为混电飞行器的设计提供参考依据。尽管其他固定翼垂直起降飞行器构型差异较大,但应用场景相近,且均包含如图1所示的固定翼、旋翼、模态转换等主要飞行模式。因此在进行设计时,可采用相同方法对不同构型的固旋翼垂直起降混电飞行器推进系统进行设计。
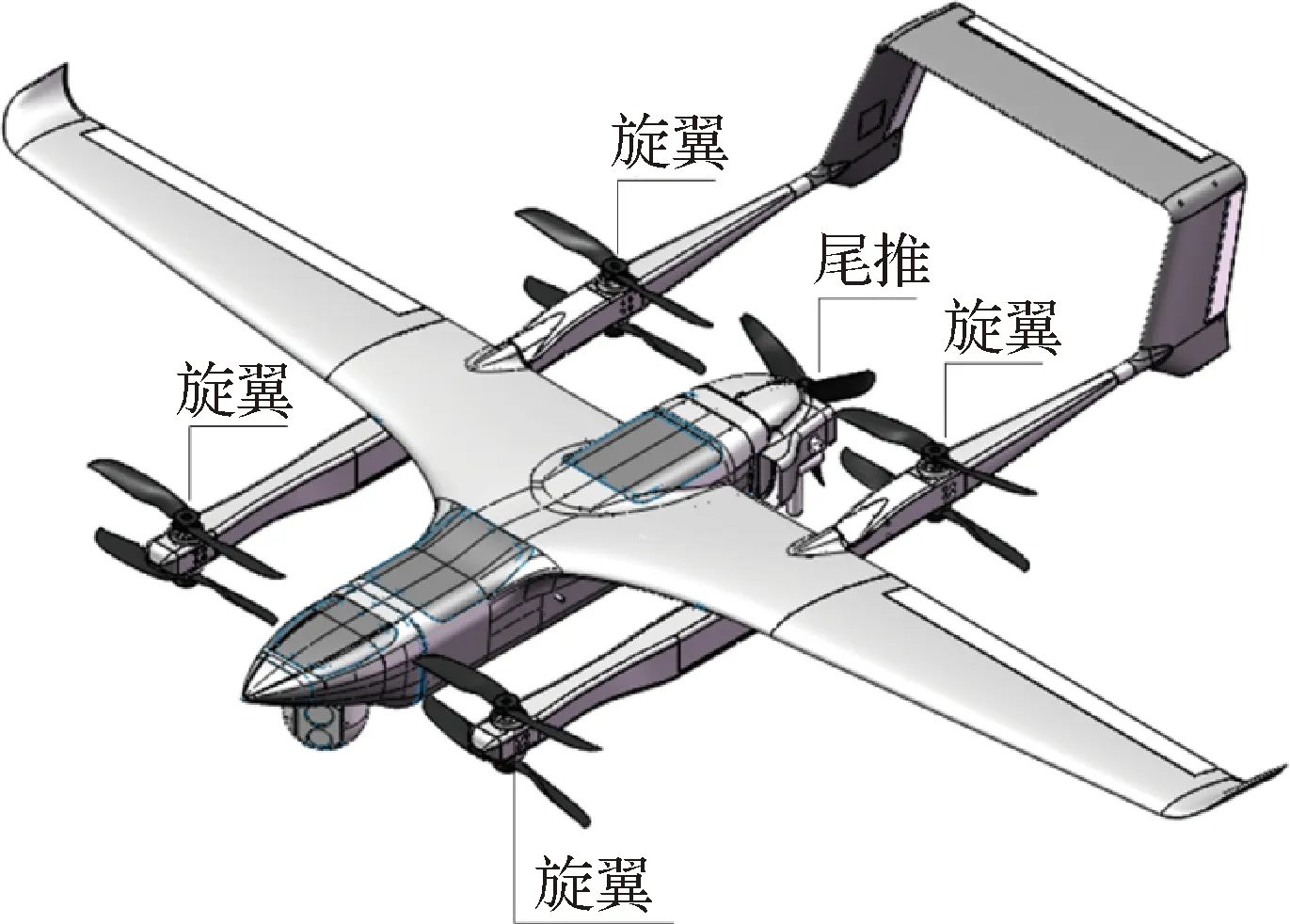
图1 固旋翼垂直起降飞行器Fig.1 Fixed-wing VTOL aircraft
1 设计流程
为了找到合理的设计流程,首先需要分析推进系统的结构、节能机理和功率分配原则,然后结合飞行器的顶层设计要求,最终确定设计流程。
1.1 混电系统结构
常见的应用于飞行器的混电系统结构为串联式混电和并联式混电推进结构,如图2所示。
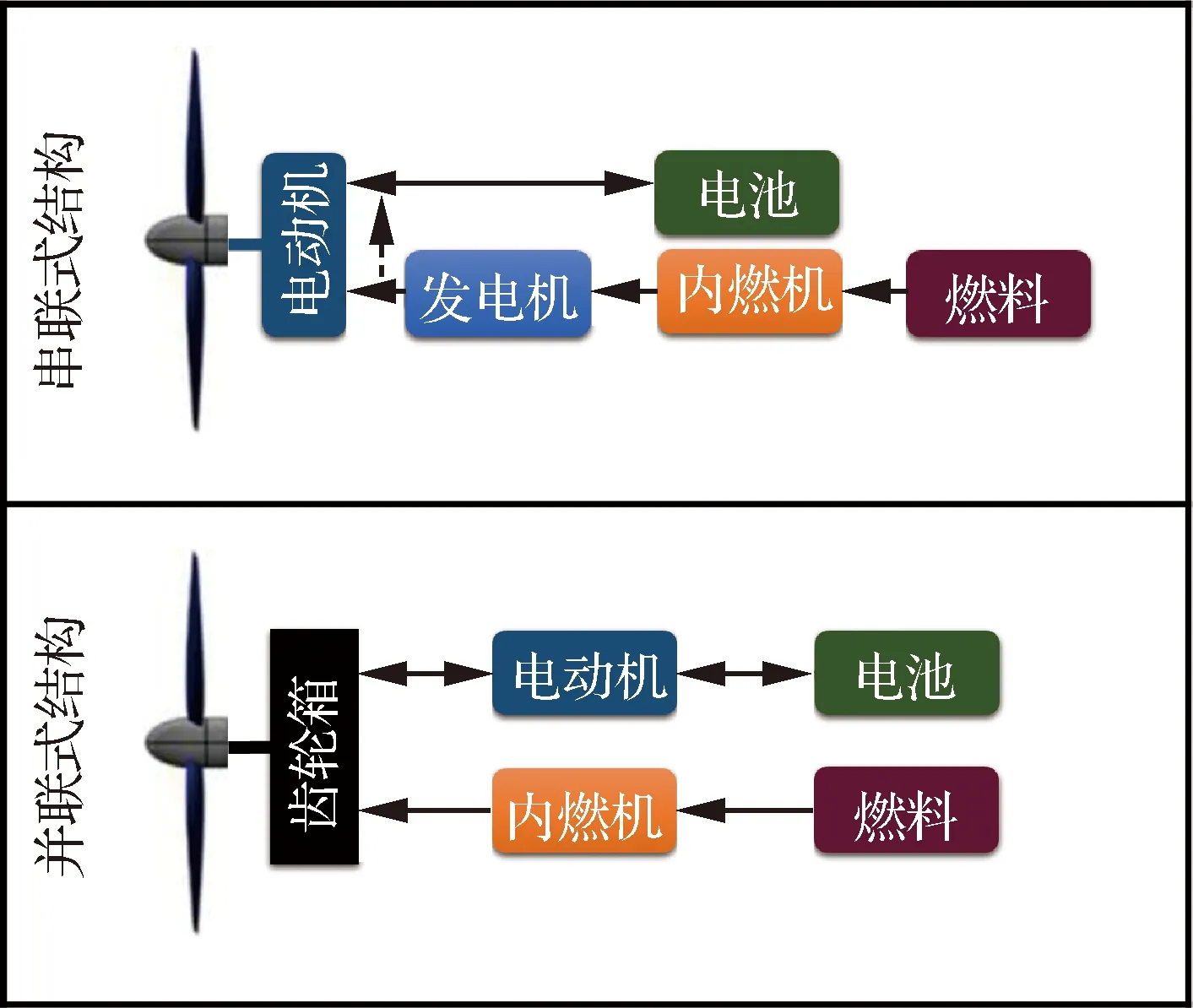
图2 混电系统Fig.2 Hybrid-electric powertrains
在进行分析之前,应综合考虑并具体设计每种混电推进结构。在并联式混电传动系统中,电动机和内燃机通过机械方式(通常为齿轮箱)连接到传动轴上。在串联式混电传动系统中,螺旋桨完全由电动机驱动,电动机的尺寸根据总性能要求确定。已有研究表明并联式结构比串联式结构效率更高,但串联式混电系统由发电机通过交直流转换模块(AC/DC模块)为推进系统供能(或为电池充电),将ICE与功率需求分离,这为ICE在最优燃油经济区持续运行提供了机会。
更重要的是,串联式混电系统可以设计多螺旋桨/旋翼的分布式布局,更适用于固旋翼垂直起降飞行器,其布局如图3所示。推进器通过功率的分散可进一步减缩气动噪声总声级,多推进器的冗余能为飞行器提供更可靠的推力保障,因而较传统飞行器具有更高的载运能力、环保性,以及在飞行控制与推力提供方面的鲁棒性。
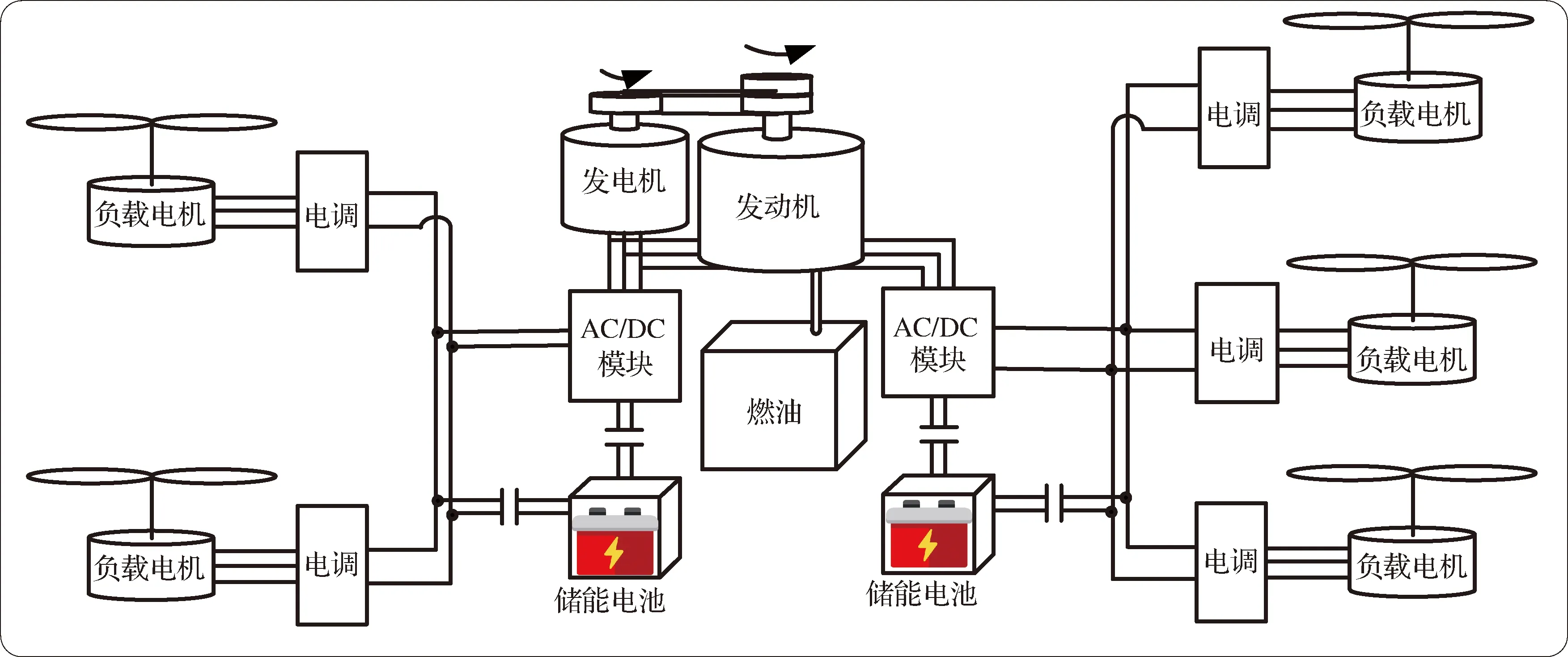
图3 分布式混电系统布局Fig.3 Distributed hybrid-electric powertrain
1.2 节能机理和功率分配
串联式混电结构可以使得ICE始终工作在最优燃油经济区,不足的功率需求则由电池这一动力源作为弥补。即从起飞到降落过程,ICE始终可以稳定在最优燃油经济区,其应用于固旋翼垂直起降飞行器的节能机理可以概括为2点:
1) 只需要采用满足飞行器巡航需要的较小ICE,由电池提供起飞、爬升等附加功率,从而提高ICE的负荷率。
2) 使ICE始终工作在最优燃油经济区。
这样的节能机理和能量管理策略也为动力系统设计提供了最主要的依据,即可由巡航约束确定ICE和发电机的设计参数。
1.3 混电系统设计流程
飞行器设计是一项综合系统的优化任务。这项优化设计可以用表1进行概括。这样的“大量参数优化”在尺寸初步确定阶段需要简化。固定翼飞行器的尺寸初步确定仅选择具有高度相关的变量进行优化设计。传统上,尺寸初步确定的问题可以做如下所述:通过改变功重比(即动力与飞机重量的比值,)和翼载荷(即飞机重量与机翼面积的比值,)来最小化飞行器最大飞行重量(Maximum Takeoff Mass,MTOM),同时满足性能约束和飞行任务。选择这些参数,因为动力系统和机翼面积是传统飞机的主要设计因素。因此,选择和,使得优化目标被最小化。

表1 设计优化问题Table 1 Design optimization problems
一般通过改变和使设计的飞行器MTOM最小,对于混电系统,最小油耗也是重要的优化指标。同时对于混电系统需要引入另一个重要变量功率混合度,表征了电动机和ICE之间的功率分配关系,即电动机最大功率与ICE最大功率之比:
(1)
对于串联式混电系统,混合度总是大于1,因为电动机将输出全部功率。基于以上研究,提出固旋翼混电垂直起降飞行器推进系统的设计流程,流程图如图4所示。固定翼巡航的功率需求和发电机组(ICE和发电机)的功率设计密切相关,因此需要通过对固定翼模式设计区间的分析,合理选择设计点。首先由选择的设计点和初始输入的MTOM确定发电机组的功率和重量参数,将发电机组设计功率代入垂直起降过程需求功率关系式进行计算,得到旋翼模式下推进系统的功率和重量参数。结合具体飞行任务,可以得到所需要的能量重量,包括电池和燃油重量,完成飞行器MTOM和推进系统设计参数的第一次迭代计算。每一次迭代得到的MTOM作为下一次迭代的输入值,经过不断迭代计算后,最后检验能量运行过程是否存在功率或电流过载情况。以电池放电倍率为例,若有电流过载情况则需要增大电池质量分数重新进行迭代;若无过载情况,则迭代完成。
2 建模分析
根据图4给出的设计流程,本节将详细介绍固旋翼混电垂直起降飞行器的数学模型。
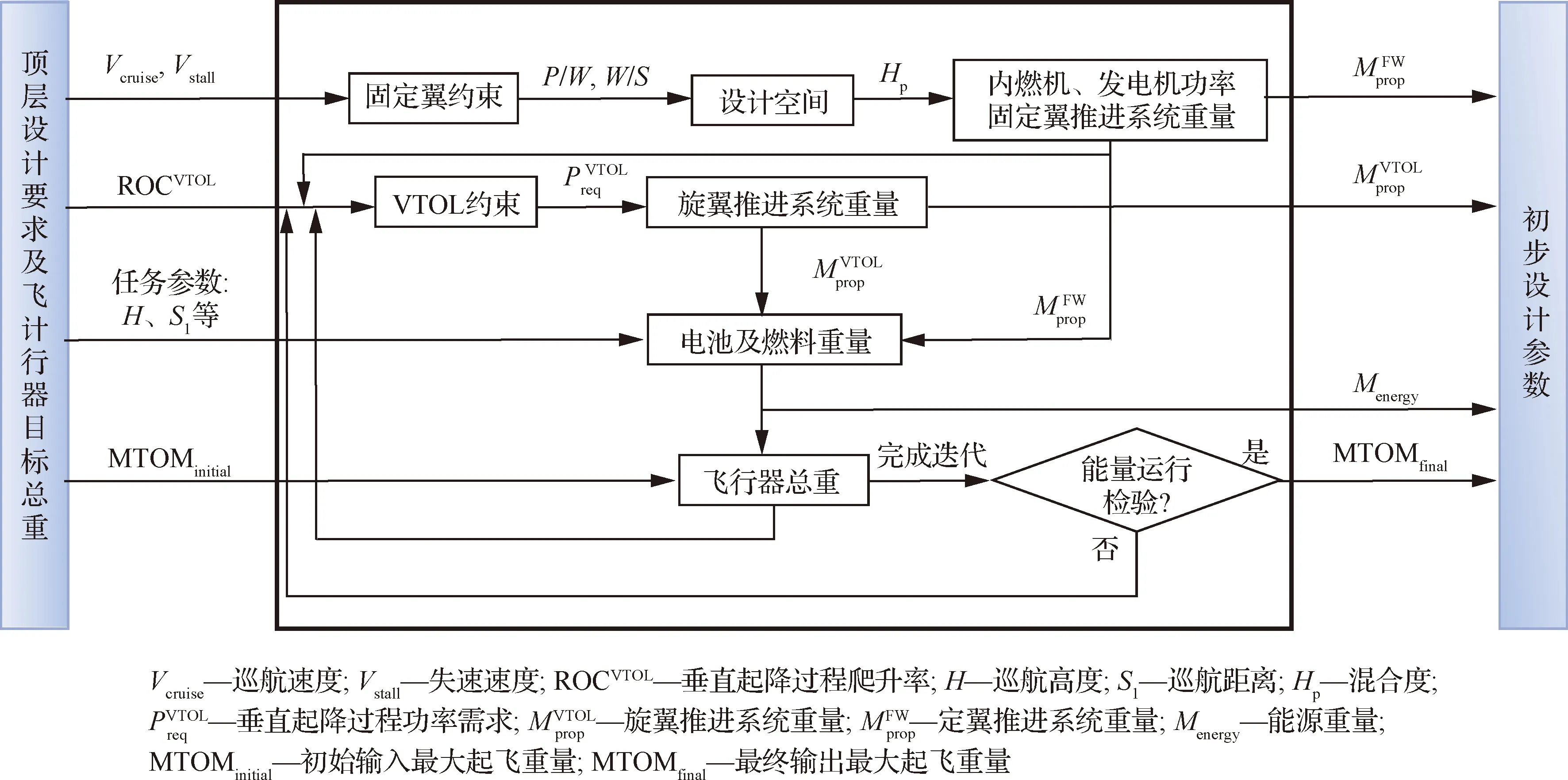
图4 固旋翼混电垂直起降飞行器推进系统设计流程Fig.4 Design process of hybrid-electric fixed-wing VTOL aircraft propulaion system
2.1 固定翼模式设计区间
传统上的通用航空飞机设计,即固定翼飞行器的设计,设计区间主要由4种约束构成:起飞距离、巡航速度、爬升率、失速。对于固旋翼混电垂直起降飞行器而言,起飞过程不属于固定翼模式,因而在设计固定翼模式时,不需要考虑起飞距离的约束,起飞过程约束将在下一步旋翼模式下考虑。由于固定翼垂直起降式飞行器整个飞行过程功率不匹配程度更高于通用航空飞机,因此在设计时,需要结合固定翼垂直起降式飞行器飞行工况做进一步约束。
2.1.1 固定翼模式约束
利用所有约束,可以根据设计目标确定设计点及其相应的推进系统。固定翼模式下巡航约束均基于Gudmundsson的方程,即

(2)
(3)
式中:,min为最小阻力系数;为阻力系数;为升力系数;AR为机翼展弦比;为奥斯瓦尔德因子;为诱导阻力常数。由于活塞发动机和电动机的输出为功率而不是推力,因此需要将推重比转换为功重比。假设螺旋桨效率为
(4)
式中:为推力;为飞行速度;为当前螺旋桨效率。固定翼模式巡航约束的计算公式为

(5)
(6)
式中:为动压头;为空气密度。固定翼模式爬升约束的计算公式为

(7)
式中:ROC为爬升率;为最佳爬升速度,其计算公式为

(8)
升限约束同样可以用上式计算,通常以0.5 m/s的最大爬升率作为升限。对于小型垂直起降飞行器,最大飞行高度一般不超过1 000 m,升限约束不是主要约束。飞行器机翼负载上限由维持失速的翼载荷确定,其计算公式为

(9)
式中:为失速速度。在约束图(见图5)中,失速约束表现为设计区间右边界。
2.1.2 设计点选择
第1节分析了固旋翼混电垂直起降飞行器的功率匹配原则,得出在固定翼巡航状态下,由ICE驱动发电机提供动力,由此可以确定固定翼模式下推进系统的设计域和设计点,如图5所示。
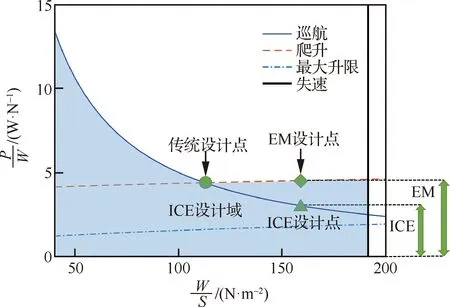
图5 固定翼模式下性能约束的设计域Fig.5 Design space of point performance constraints in fixed-wing mode
圆形点为传统单一能源推进系统的最优设计点,阴影部分为串联式混电系统ICE设计域,考虑功率分配原则,串联式混电系统由电动机驱动螺旋桨,因此菱形点为固定翼模式下电动机的设计点,分布于设计域上沿边界,三角形点则为ICE和发电机参数设计点,分布于ICE设计域内。
这种设计域的确定方法,对通用航空飞机的设计域进行了缩小,将ICE和发电机的设计域缩小至巡航约束上,而电动机的设计域则缩小至满足所有约束的下沿。
2.2 旋翼模式功率计算
飞行器垂直起飞过程对应旋翼模式,因此需要与固定翼模式区分并单独分析。旋翼吸收功率与推力的关系公式为
(10)
式中:为旋翼轴向诱导速度,计算公式为

(11)
FM为旋翼效用因子,计算公式为
FM=0474 2·0079 3
(12)
通过假定平板阻力得到飞行器在垂直起降过程的推力公式为
=12(+·ROC·)
(13)
式中:为旋翼桨盘面积,计算公式为
(14)
式中:为旋翼个数;DL为桨盘载荷,可用经验公式计算:
DL=3.226 1MTOM+74.991
(15)
通过式(10)~式(15)可以计算出垂直起飞过程的功率需求。
2.3 重量计算
2.3.1 飞行器MTOM
飞行器的MTOM可以表示为空重、有效载荷、能源质量的总和:
MTOM=++
(16)


(17)
MTOM=

(18)
设计流程是一个迭代过程,MTOM在每次迭代都会更新,直到连续两次迭代结果在误差允许范围内,从而完成混电推进系统设计。
2.3.2 推进与动力系统重量
电动机、发电机和电动调速器的重量/质量均可由经验公式得到,目前广泛使用的电机为无刷外转子电动机,其重量与功率关系的经验公式为
(19)
式中:各经验系数分别为=0.889 0,=-0.288 0,=0.158 8;电力系统电压统一取为200 V。发电机质量的计算公式为
=0385(+044)
(20)
同样,电动调速器质量的经验公式为

(21)
式中:经验系数=0.738 3。
螺旋桨/旋翼的质量可由Roskam和Lan提出的公式计算:
=6.514×10····
(22)
式中:系数建议取值分别为15、0.6;为螺旋桨效率;为桨叶数;′为螺旋桨个数;为螺旋桨/旋翼直径,计算公式为

(23)
系数对应不同的桨叶数2、3、4,取值分别为0.107 2、0.099 5、0.093 8。
2.3.3 能源重量
能源重量分为电池和燃油2个部分,主要取决于具体的飞行任务,需要结合整个飞行期间的能量需求,包括空气阻力、动能变化和势能变化的影响,计算公式为

(24)
式中:为升力;为阻力;为升阻比。
由于ICE始终工作在最优燃油经济区,为简化模型,可认为ICE在整个飞行过程输出恒定功率,同时燃油消耗率(BSFC)保持恒定,因此燃油质量可表示为
(25)
ICE不足的功率由电池作为补充,因此电池的质量为

(26)
式中:为内燃机输出功率;为电池容量;为电池效率;为电传导效率。考虑到电池深度放电问题,因此需要乘以系数1.2以避免电池出现深度放电。
3 算例分析
本节将以实际的飞行任务为算例,完成飞行器MTOM设计过程。首先给出飞行器的基本参数,见表2。根据设计流程,需给出固定翼和旋翼模式下的性能约束和飞行任务,其中性能约束见表3。传统的单一能源驱动的飞行器在确定图5所示的设计区间后,将绘制“指纹图”使性能指标可视化。第2节通过分析混电飞行器的能量管理策略,将设计域缩小,因而只需对ICE和电动机设计点进行遍历。由于性能约束和飞行任务的交互作用,最佳设计点很难预测,因此可以通过遍历设计点来获得确定的满足性能约束和飞行任务的最优设计,图6 给出了确定的性能约束下的设计区间。假定一个常见的飞行任务,飞行器垂直起飞并爬升至600 m的高度,巡航2 h,然后降落至地面,要求设计一架可以同时满足性能约束和飞行任务的固旋翼混电垂直起降飞行器,优化问题可描述为
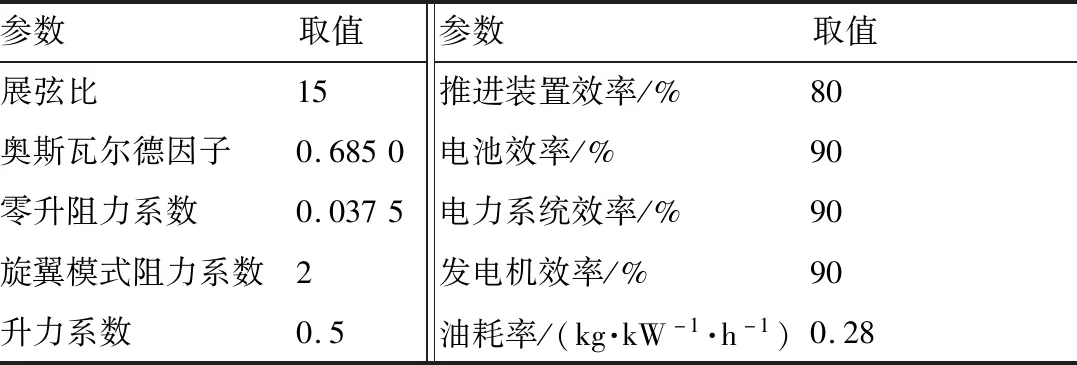
表2 飞行器基本参数Table 2 Basic parameters of aircraft
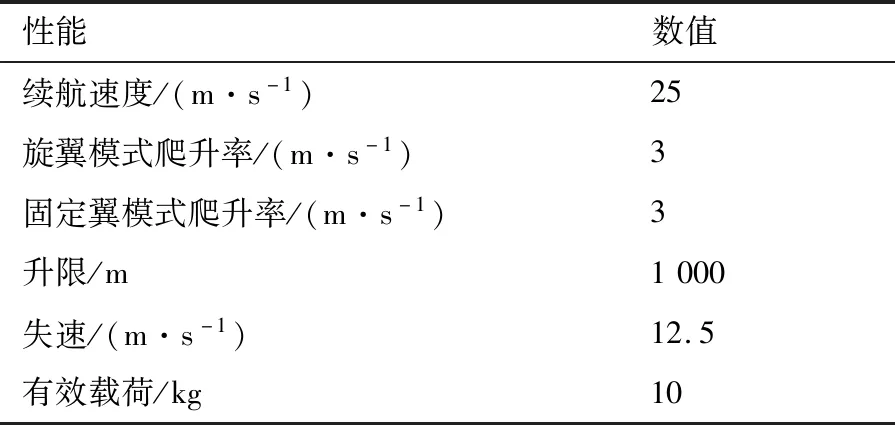
表3 性能约束Table 3 Point performance
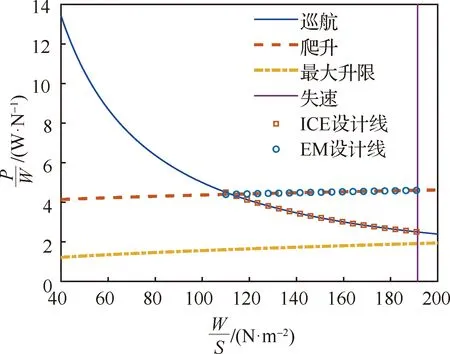
图6 性能要求下的设计线Fig.6 Design line of point performance
min{MTOM,}=(,)
(27)
3.1 算例1:最小MTOM和燃油消耗一致
在确定飞行任务的情况下,任取设计线上一点即可完成在该设计点上的迭代,同时对不同设计点进行遍历得到图7所示的最小MTOM及最小油耗点。图7中,最小MTOM和燃油消耗设计点均在失速边界。由于在给出飞行任务而计算飞行器携带燃料和电池重量的过程中,只考虑了携带的燃料和电池是否可以满足整个飞行的能量需求,未检验电池放电倍率是否小于电池最大放电倍率,每个设计点完成迭代后,需要进一步检验电池的放电情况。电池输出功率为
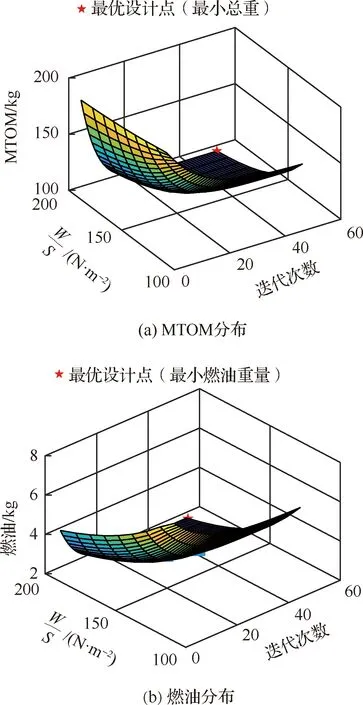
图7 不同翼载荷下MTOM及燃油分布Fig.7 MTOM and fuel distribution of different wing-loading

(28)
式中:为需求功率;为发电机输出功率。电池输出电流为电池输出功率与电池电压之比:
(29)
计算得到=66.1 A。需要对电池的放电倍率进行测试,若放电倍率小于设计电池重量下的最大放电倍率,则设计完成;若放电倍率大于设计电池重量下的最大放电倍率,则需要增大电池比重,重新进行迭代,直到电池的放电倍率小于设计电池重量下的最大放电倍率为止。
对于最小MTOM和燃油消耗一致的设计点,可以认为是该性能约束和飞行任务下的最优设计点。该设计点下,各部分重量如图8所示。
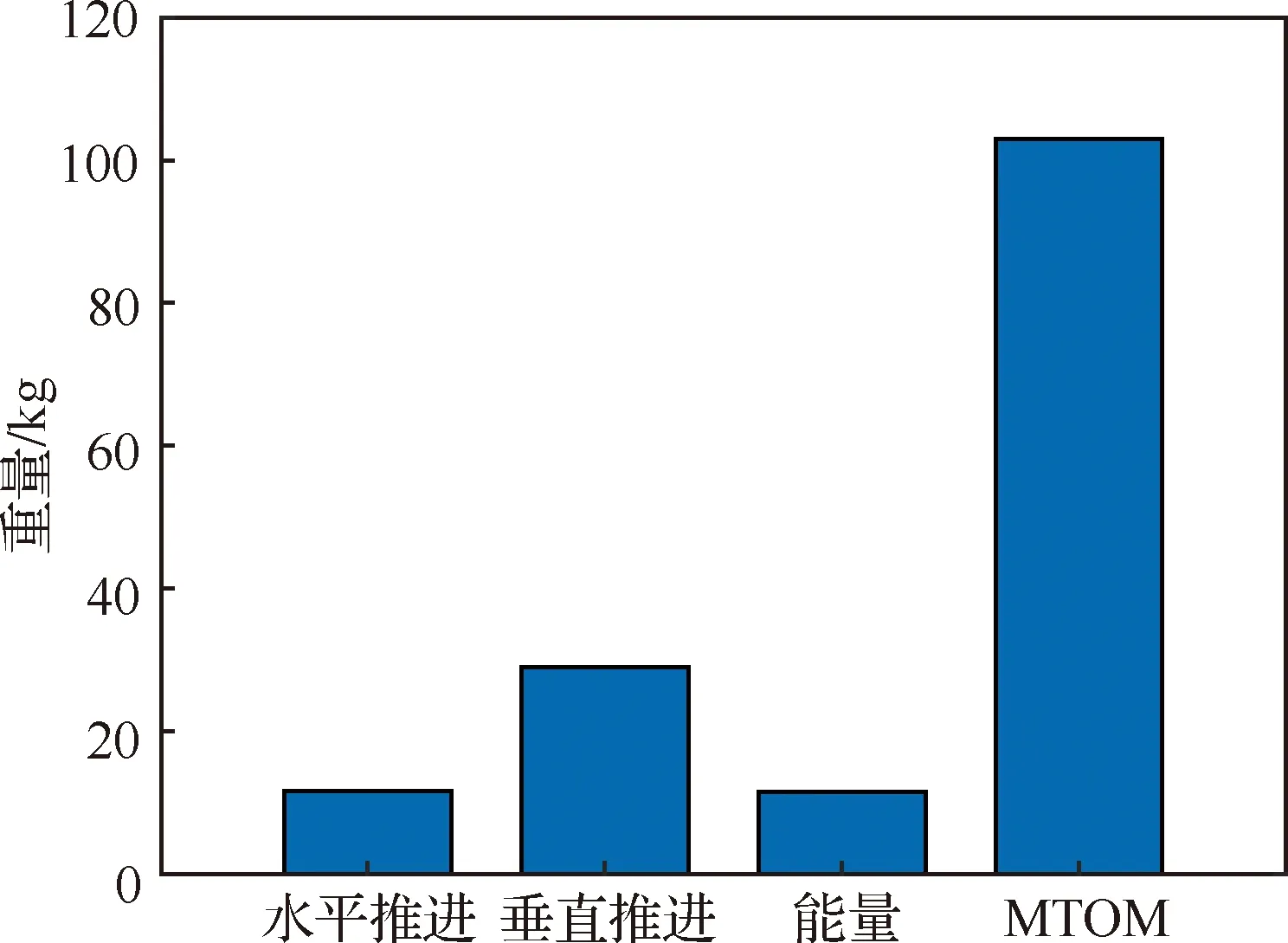
图8 最优设计点处设计结果Fig.8 Design results at optimal design point
3.2 算例2:最小MTOM和燃油消耗不一致
最小油耗与最小MTOM存在不一致情况,这是由于以上设计是在确定的功率分配原则下完成的。为进一步减少油耗,通过减小ICE的设计功率,使得每个飞行阶段增大,取极限,则当=∞时,飞行器为纯电动,显然纯电动飞行器的油耗为0。为了说明这个问题,将上述过程得到的最优ICE设计点下移,如图9箭头所示。不足功率由电池补充,下移过程不断增大,以巡航过程的作为参考,其下移过程的从1趋近∞。由于电池能量密度限制,为防止迭代过程无法收敛,将飞行任务修改为飞行器垂直起飞并爬升至450 m的高度,巡航30 min,然后降落至地面。对设计点下移的整个过程进行可视化,得到图10所示的燃料和MTOM的分布情况。在同时满足飞行任务的情况下,混合度增大过程油耗减小,但同时飞行器的MTOM增大。因此,2种优化目标的设计点不同,不同优化目标下的设计结果如图11所示。为了确定优化目标,需要结合制造成本、环保要求和飞行任务等因素。
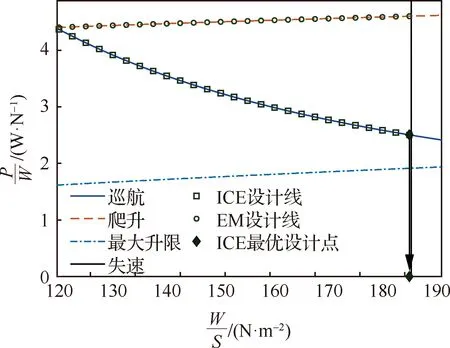
图9 ICE最优设计点下移示意图Fig.9 Moving down of ICE optimal deign point
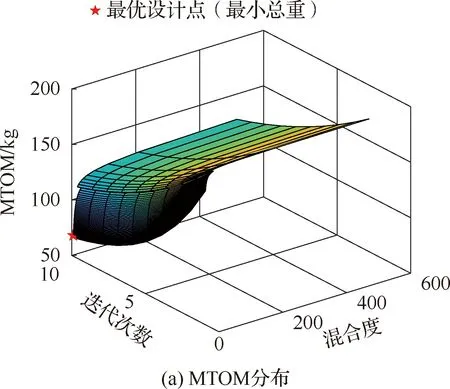
图10 不同混合度下MTOM及燃油分布Fig.10 MTOM and fuel distribution of different Hp
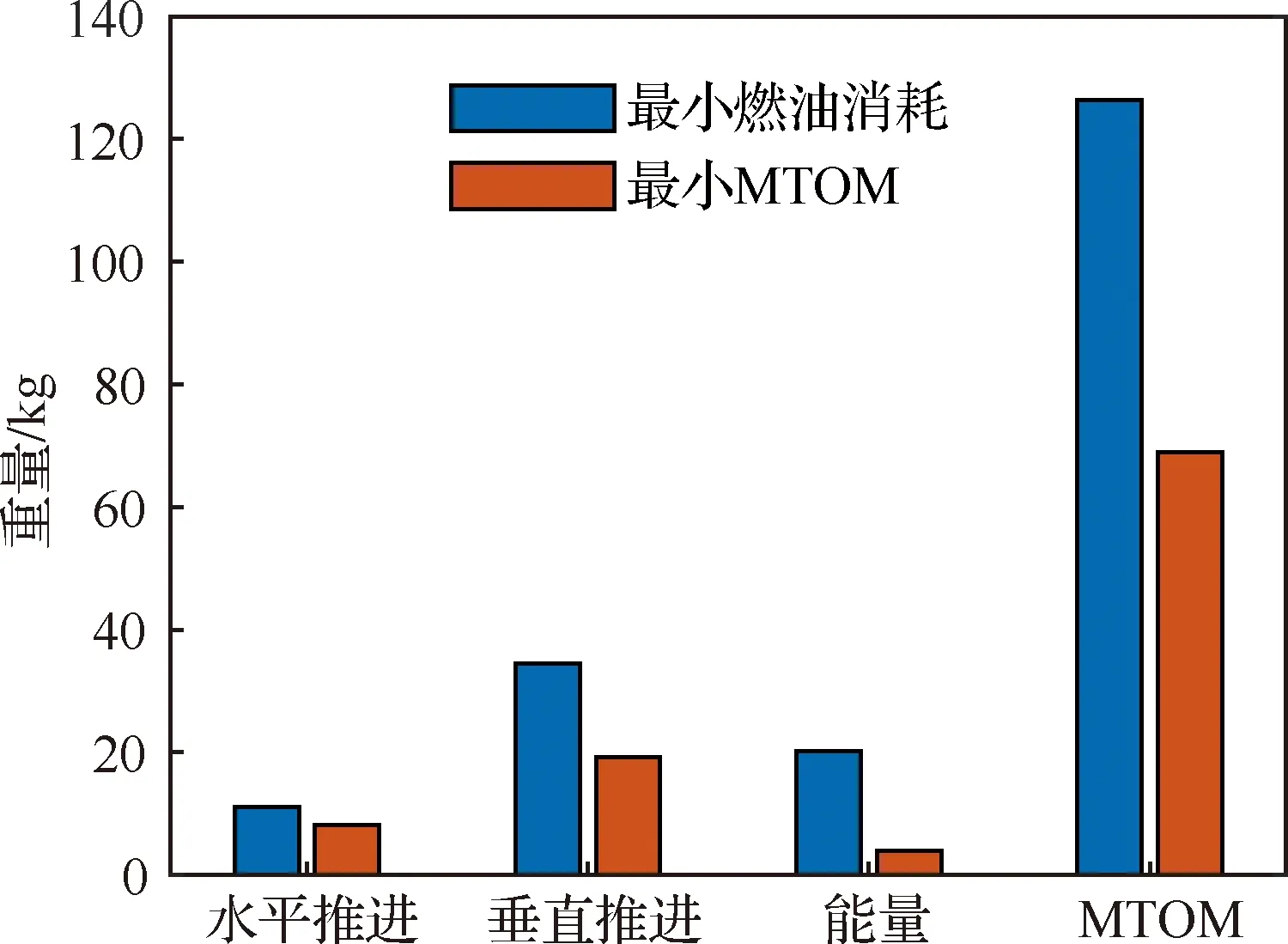
图11 不同优化目标下的设计结果Fig.11 Design results of different optimization objectives
3.3 充电问题
在混电飞行器的研究中,不同文献给出了不同的能量管理策略,文献[8-30]认为在巡航的初始阶段,ICE需要提供多余的能量为电池充电,文献[11-12]并未提及充电过程。本文的设计过程主要针对不充电模式,另有文献[21]给出的能量管理策略更为复杂,类似于混合动力汽车的能量管理策略,混电飞行器的能量管理策略尚未完全统一。下面主要针对巡航的初始阶段ICE提供额外功率驱动发电机为电池充电的策略进行讨论,给出2种方法:① 增大巡航阶段推进系统功重比约束;② 降低充电阶段飞行器稳定飞行速度。
3.3.1 增大巡航阶段推进系统功重比约束
结合图5、图6的设计域和设计线,将巡航过程的约束乘以倍(>1)得到充电过程的约束,此方法下的ICE的设计域见图12中的阴影部分。
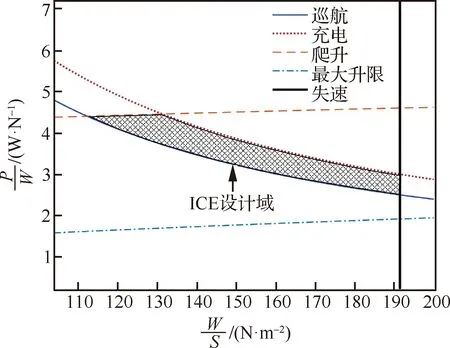
图12 增大巡航阶段推进系统功重比约束后ICE设计域Fig.12 Design space of ICE after raising P/W of cruise phase
需要综合充电时间以及具体飞行任务确定的大小及ICE设计点。这种方法的优势在于,无需对飞行任务做出改变而完成充电过程,但由于ICE的设计功率大于巡航的需求功率,因而ICE负荷率降低。
3.3.2 降低充电阶段飞行器稳定巡航速度
通过改变迎角来调节可以改变稳定巡航速度,从而降低充电阶段飞行器巡航的功率需求,固定翼飞行器稳定巡航速度满足
(30)
假设的变化范围为0.5~1,调整后的设计域如图13所示。这种充电方式的飞行器设计方法与不充电情况下一致,由于在巡航初始阶段通过调整降低了功率需求,ICE剩余功率可以为电池充电,整个飞行过程ICE不需要调节油门,可以稳定在最优燃油经济区,不足之处在于需要降低一定的巡航速度。
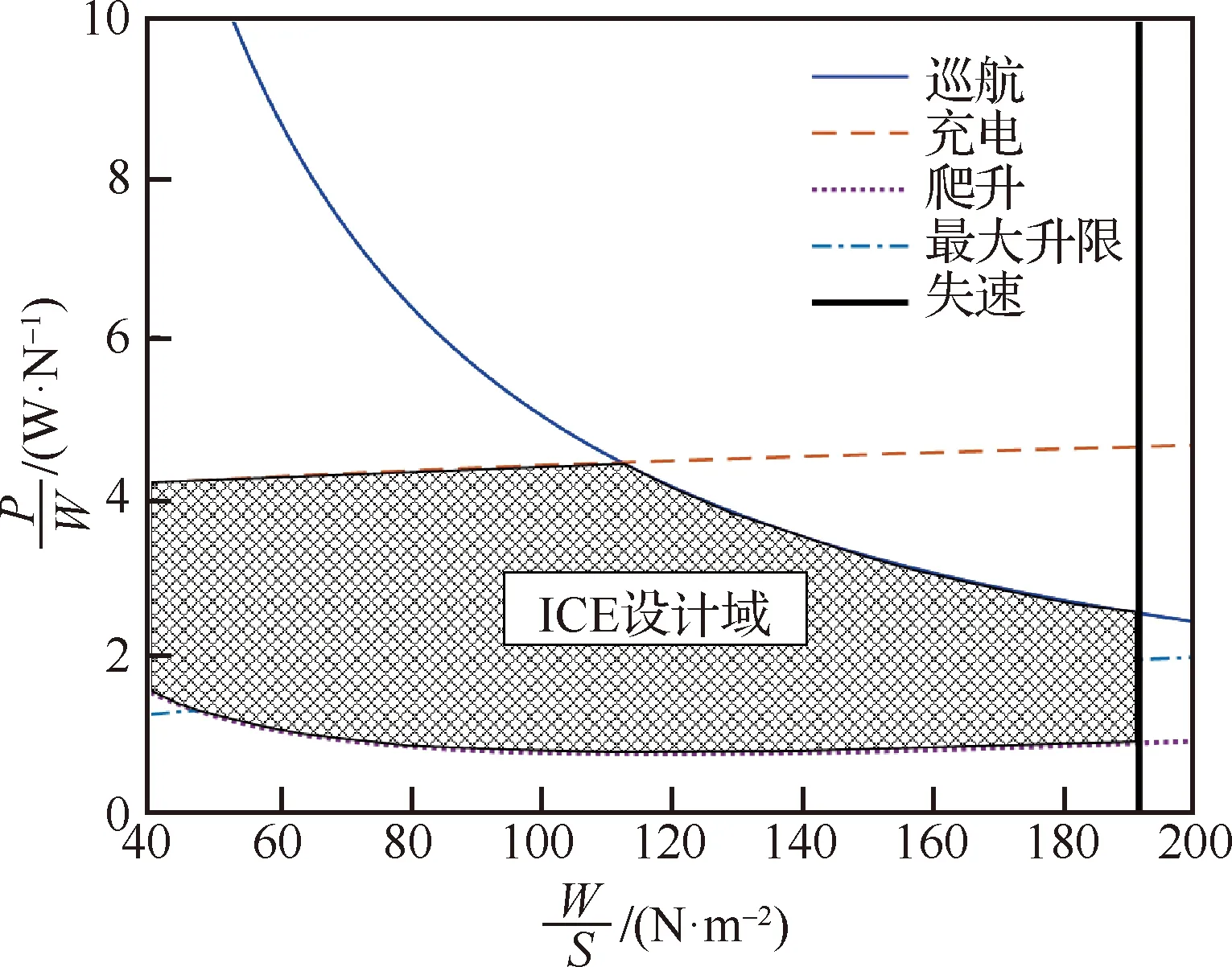
图13 降低充电阶段飞行器稳定巡航速度后的ICE设计域Fig.13 Design space of ICE after reducing stable cruise speed
4 设计结果有效性分析
由于已运营并公开的混电飞行器参数极少,此设计方法的验证较为困难。本文将设计结果(算例1)与英国剑桥大学仿真平台通过放缩SOUL机型后计算得到的固定翼混电飞机数据进行对比,剑桥大学仿真数据如表4所示。
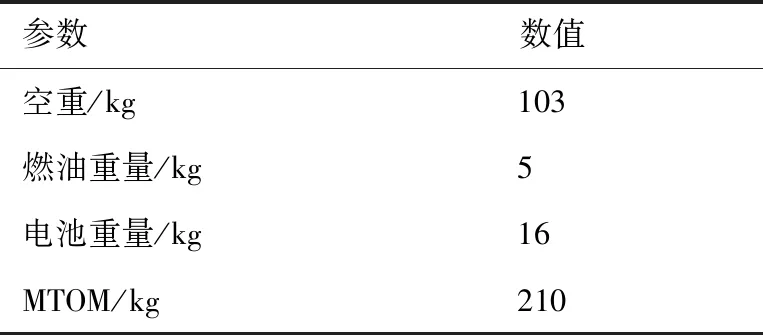
表4 剑桥大学混电飞机仿真结果Table 4 Simulation results of hybrid-electric aircraft by University of Cambridge
由于飞行器MTOM不同,因此主要对能源系统重量占比进行对比,结果如图14所示。从图14 中可以看出,本文设计结果中燃油和电池重量百分比与剑桥大学仿真结果一致,但考虑到剑桥大学仿真过程中电池能量密度为144 (W·h)/kg,而本文电池能量密度为240 (W·h)/kg,因此本文电池实际比重相对更大。考虑到剑桥大学仿真对象为固定翼飞行器,无垂直起降过程,对电池能量和功率要求较低。因此本文电池占比与剑桥大学仿真结果持平可以认为合理。另外,固旋翼飞行器多出了旋翼系统,因此其他部分占比更多,空重及其他部分占比相差9%,总体说明设计结果是有效的。
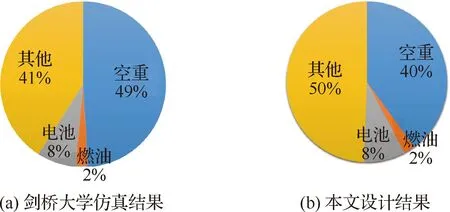
图14 本文重量百分比设计结果与剑桥大学仿真结果对比Fig.14 Weight percentage comparison of designing result and result of Cambridge of University
5 结 论
本文综合了纯电动垂直起降飞行器和通用固定翼混电飞行器的尺寸初步确定方法和总体设计方法,给出固旋翼垂直起降混电飞行器推进系统设计方法,适用于固定翼垂直起降这一类飞行器混电推进系统设计,可以给出飞行器总体及各个分系统的设计指标,从而对分系统进一步优化。通过给定的常见飞行任务,完成了在确定能量管理模式下的优化设计,得到不同翼载荷下的最小MTOM和油耗的分布,以及以最小MTOM和最小油耗为设计目标的设计点。在目前的电池水平下,通过改变能量管理策略,提高混合度,尽管可以降低油耗,但同时增大了飞行器的MTOM,导致制造成本增加。最后通过与剑桥大学混电飞机仿真结果对比,验证了本文设计方法的有效性。
