汽车前照灯拐点无法捕捉问题分析及解决
2022-07-02胡浩,李剑
胡 浩, 李 剑
(上汽通用汽车有限公司武汉分公司, 湖北 武汉 430200)
1 前言
汽车前照灯发展史: 煤油灯—白炽灯—卤素灯—氙气灯—LED前照灯。 前照灯位于车辆前部, 一般包含近光灯、远光灯、 驻车灯以及日间行车灯4种功能。 前照灯不仅关系到车主的外在形象, 更与夜间开车或坏天气条件下的安全驾驶紧密联系。 由于汽车前照灯的功能如此重要, 其问题也往往会受到客户的高度重视。 本文对某车型项目阶段汽车前照灯拐点无法捕捉问题进行原因分析, 并提出解决方案, 最终验证结果。
2 故障现象
一辆试验车在做前照灯捕捉拐点检测时, 发现设备无法捕捉到汽车前照灯拐点。 光影图显示有两个高度相仿的波峰, 设备无法判断拐点, 如图1所示。

图1 缺陷示意图
3 前照灯拐点工作原理
3.1 法规要求
GB 7258—2017机动车运行安全技术条件要求, 在空载车状态下, 汽车前照灯近光光束照射在距离10m的屏幕上, 近光光束明暗截止线转角或中点的垂直方向位置, 对近光光束透光面中心 (基准中心, 下同) 高度小于等于1000mm的机动车, 应不高于近光光束透光面中心所在水平面以下50mm的直线且不低于近光光束透光面中心所在水平面以下300mm的直线。 除装有一只前照灯的三轮汽车和摩托车外, 前照灯近光光束明暗截止线转角或中点的水平方向位置, 与近光光束透光面中心所在处置面相比, 向左偏移应小于等于170mm, 向右偏移应小于等于350mm。
3.2 拐点捕捉工作原理
二阶导数法捕捉算法: 以光型最亮点 (绿点) 为中心,选取一条合适的等照度曲线, 在捕捉区范围内对等照度曲线进行二次求导, 得到的二次求导曲线 (黄线) 的最大的极大值为前照灯拐点。 二阶导数法示意图如图2所示。

图2 二阶导数法示意图
切线法捕捉算法: 以选取的等照度曲线, 作该曲线的切线, 该等照度曲线距离该切线最远点为拐点。 切线法示意如图3所示。 本案例采用二阶导数法捕捉算法进行捕捉拐点。

图3 切线法示意图
3.3 截止线形成工作原理
图4、 图5分别为反/投射式前照灯近光光学系统。 其中, 反射式前照灯近光光学系统: 反射镜+截止线+透镜,光源发出光, 经过反射镜反射, 遮光器遮挡形成截止线,形成如图6所示光型图; 图5为投射式前照灯近光光学系统:截止线+透镜, 光源发出光直接经遮光器遮挡形成截止线,形成如图6所示光型图。
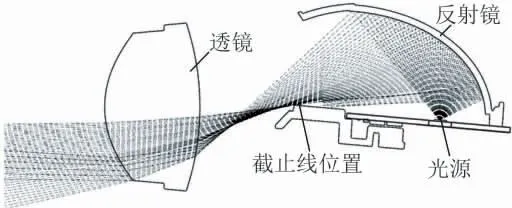
图4 反射式前照灯

图5 投射式前照灯

图6 近光灯光型图
4 故障分析
4.1 多波峰形成原因
该车前照灯采用LED光源+反射碗结构, 截止线由多个反射面反射的光累积形成, 如图7所示, 不如挡板式结构锐利清晰。 累积成像截止线会有凹坑或凸起, 二阶导数曲线在这些位置会形成波峰, 即为干扰波峰。 挡板式结构拐点波峰高度更高, 如图8所示, 抗干扰性强, 而反射碗式容差性较差。
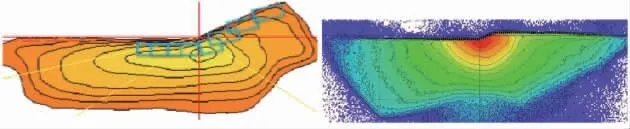
图7 LED+反射碗结构光型
4.2 关键控制点排查
梳理并排查了影响光型的关键控制点, 包括反射镜型面尺寸、 镀铝厚度、 底漆厚度及光源与反射镜相对位置,排查情况见表1。 经过关键点排查, 反射镜底涂漆厚度偏上差, 是造成问题的可疑点。

表1 关键控制点排查表
4.3 反向验证
如表2所示, 分别生产3套较薄底漆 (10~11μm)、 3套适中底漆 (11~13μm)、 3套较厚底漆 (13~14μm) 共计9套零件进行整灯验证。 发现底漆厚度控制在10~13μm时, 二次求导波形无干扰波峰, 设备可准确捕捉到拐点。 底漆厚度控制在13~14μm的零件, 二次求导波形会出现两个波峰,3个零件其中一个零件两个波峰高度相差不大, 对设备而言形成干扰波峰, 造成拐点无法捕捉。 确定反射镜底涂漆厚度偏上差是造成设备拐点无法捕捉的根本原因。

表2 验证件时间节点
5 解决方案
借鉴业内优秀前照灯供应商工艺过程, 使用喷涂代替淋涂, 减少反射镜底涂漆厚度, 将厚度控制在10~13μm。
优化尺寸零件在工厂上线使用, 跟踪一个月, 再无拐点无法捕捉问题发生, 确认问题解决。
6 总结
1) 光学设计阶段, 不仅关注法规对测点照度值的要求, 还要兼顾后续制造过程中调光要求。 增加拐点二阶导曲线波峰的高度评审: ①光型拐点波峰与干扰波峰差在0.1以上; ②左右上下极限调节中光型高度差变化在0.03以内。
2) 在项目阶段, 完成光型潜在过程影响因素的识别,并在量产前验证过程稳定性及实施监控。
3) 在光型封样阶段, 选取好、 中、 差3种状态样件进行现场验证封样, 在抓捕范围和等照度曲线等参数上选择最优化参数。
