基于MPC和模糊控制的智能汽车路径追踪研究
2022-07-01石振新冯剑波王衍学
石振新, 冯剑波, 王衍学
(北京建筑大学,北京 102616)
随着人工智能和汽车工业的发展,智能汽车已成为车辆工程领域的研究前沿,对车辆高度智能化的控制能够解放人们的双手,提高道路通行能力.路径跟踪控制是实现智能行驶的关键环节,通过已知的路径,计算出车辆当前状态下所需要的方向盘转角,使得车辆能够按照预设的路径行驶[1].进行轨迹追踪前,就要规划出合理的跟随路径.文中参考了文献[2]中的五阶多项式的避障路径,满足多种约束条件的同时不会增加模型的复杂性和计算时间.汽车是一个非完整约束系统,其非线性特点使得很多因素无法分析求解,使得在执行汽车轨迹跟踪控制时要考虑多种约束,十分复杂.而MPC算法能够有效地解决这种带约束的问题[3],在自动驾驶领域应用越来越多.文献[4]中就基于MPC算法通过控制前轮实现了车辆对双移线轨迹的跟踪.此外,在高速转向工况下,由于车辆的侧向加速度很大,稳定性降低,车身会出现震荡摆动,导致轨迹跟踪偏差较大.Peng等[5]通过直接横摆力矩控制来纠正车身姿态,使汽车按照理想的轨迹行驶.鉴于此,文中以横摆角速度及质心侧偏角误差值为双输入,通过模糊控制器输出横摆力矩施加至车轮,以减少高速工况下轨迹的偏差.
综上,文中采用MPC算法跟踪路径,通过模糊控制修正偏差,最后,通过CarSim/Simulink联合仿真验证了本轨迹跟踪控制方案的有效性.
1 汽车动力学建模
文中研究的是车辆高速情况下的轨迹追踪问题,为提高控制器的实时性,减少计算量,将车辆模型进行如下假设:①假设车辆无垂向运动且不受悬架的影响;②忽略空气阻力以及前后轴载荷转移;③假设车辆为前驱且仅为前轮转向.
基于以上假设,车辆三自由度模型等同于单轨模型,如图1所示.
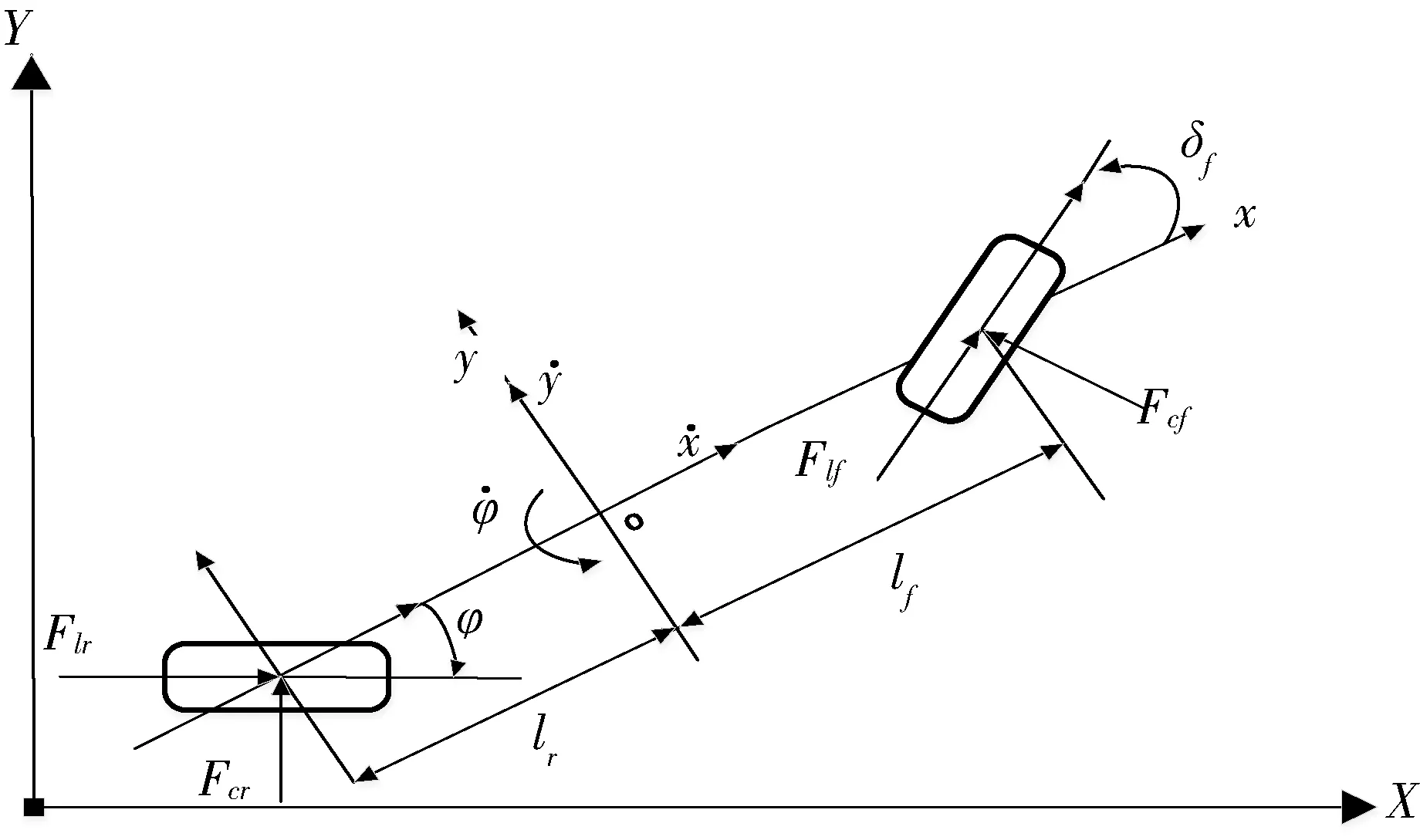
图1 三自由度车辆模型
由上图模型,可得车辆动力学方程为
(1)

轮胎力可线性表示为
(2)
式中:Ccf、Ccr为前后轮轮胎侧偏刚度;αf、αr为前后轮轮胎侧偏角;Clf、Clr为前后轮胎纵向刚度;sf、sr为前后轮轮胎滑移率.
将(2)代入(1),可得到简化的非线性车辆动力学模型:
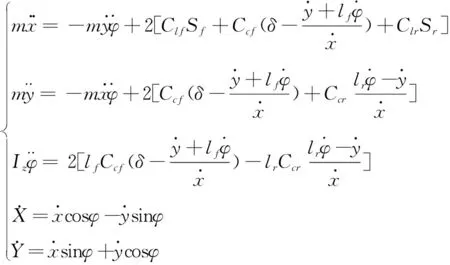
.
(3)
2 基于MPC的轨迹追踪控制器的设计
基于式(3)所建立的车辆动力学模型是非线性的,为了减少控制器计算量,提高实时性,对模型进行离散化处理,得到线性方程为
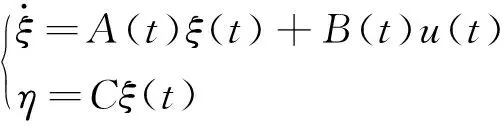
.
(4)
对雅可比矩阵求解得:
对式(4)进行离散化处理,可得
(5)
式中:Ak=AT+I;Bk=BT;T为采样时间.
(6)

此时,系统的输出量可表示为
Y(t)=ψtγ((t|t)+ΘtΔU(t),
(7)
控制器的目标函数要能够保证自车快速且平稳地追踪期望路径,设计如下目标成本函数.

(8)
式中:P,R为权重矩阵;ε为松弛因子.保证目标函数具有可行解.式(8)中前两项反映了系统对于参考路径的跟踪能力,第三项反映了对控制量变化的约束.
为进一步保障车辆行驶的安全性和稳定性,进行以下约束条件设计:
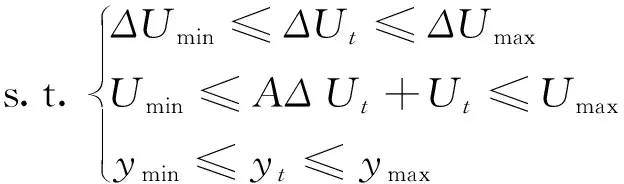
.
(9)
在每个控制周期完成上述求解后,将控制序列中的第一个元素作用于控制系统,在下一时刻,重复上述操作,以此实现对系统的持续控制.
3 基于模糊控制的偏差修正部分
针对高速工况下跟踪轨迹偏差较大的问题,文中以横摆角速度误差值及质心侧偏角误差值为双输入,通过模糊控制,输出横摆力矩施加至车轮以减少偏差[6].
理想的横摆角速度φref,理想的质心侧偏角βref表达式如下[7].
,
(10)
,
(11)
式中:vx为车辆纵向速度;μ为路面附着系数;k为稳定性因数;L为轴距.
输入量质心侧偏角误差Δβ和横摆角速度误差Δφ均定义为5个语言变量:{NB,NS,ZE,PS,PB}={负大,负小,零,正小,正大},Δβ和Δφ二者的模糊子集如图2所示.输出量额外的横摆力矩ΔM定义为7个语言变量:{NB,NM,NS,ZE,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大},ΔM的模糊子集如图3所示.
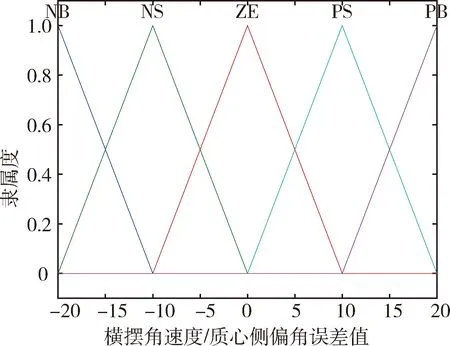
图2 输入量模糊子集
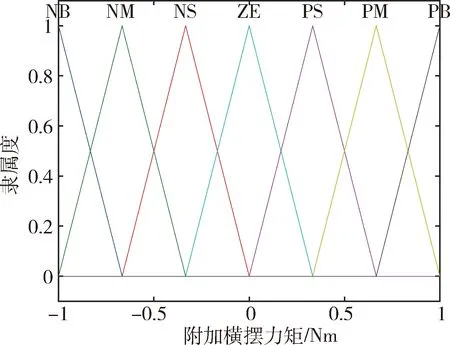
图3 输出量模糊子集
现制定模糊规则,当Δφ<0,Δβ<0时,此时就需要通过反向横摆力矩(ΔM<0)施加至车轮来减小误差,即Δφ、Δβ均为NB,ΔM为PB;若Δφ>0,Δβ>0时,则需要通过正向横摆力矩(ΔM>0)施加至车轮来减小误差,即Δφ、Δβ均为PB,ΔM为NB,所有模糊规则如表1所示.
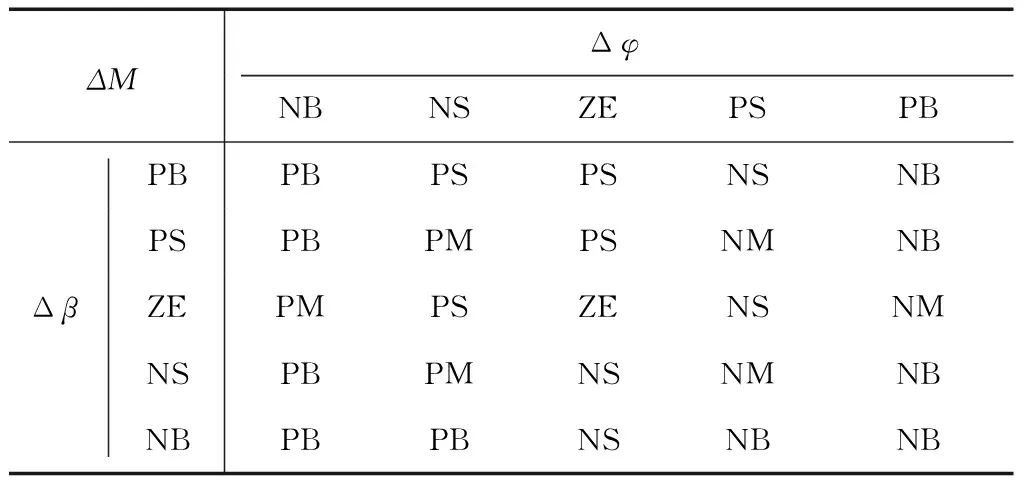
表1 模糊规则
4 系统仿真验证
基于上述分析,为验证文中提出的基于MPC和模糊控制的智能汽车路径跟踪方法在高速工况下的实用性,搭建CarSim/Simulink联合仿真模型进行仿真路径跟踪仿真.文中追踪的路径为文献[8]中的避障路径,汽车理想行驶轨迹和理想横摆角表达如下.
(12)
(13)
式中:yd为车辆换道后的侧向位移;xd为车辆换道后的纵向位移.
现设置如表2所示高速工况进行避障仿真.
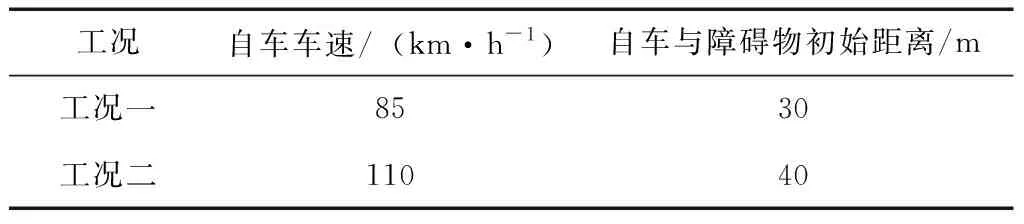
表2 仿真工况
工况一的仿真结果如图4~6所示.
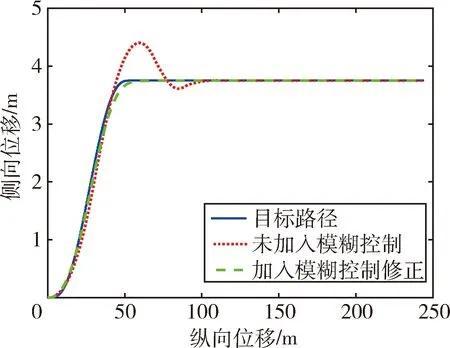
图4 行驶轨迹对比图
在工况一中,由图4和图5可以直观地看出,在较高速工况下,与未加入模糊控制相比,基于MPC控制策略的车辆在加入模糊控制修正后,行驶轨迹曲线更加贴合目标路径轨迹,横摆角也更加贴近理想曲线;由图6中的纵向位移偏差对比图可知,加入模糊控制后,偏差得到可观减少(误差值最多可修正0.63 m)且最大偏差仅为0.18 m左右,表明经过模糊控制修正后,车辆路径跟踪效果良好,跟踪精度较高.

图5 横摆角对比图
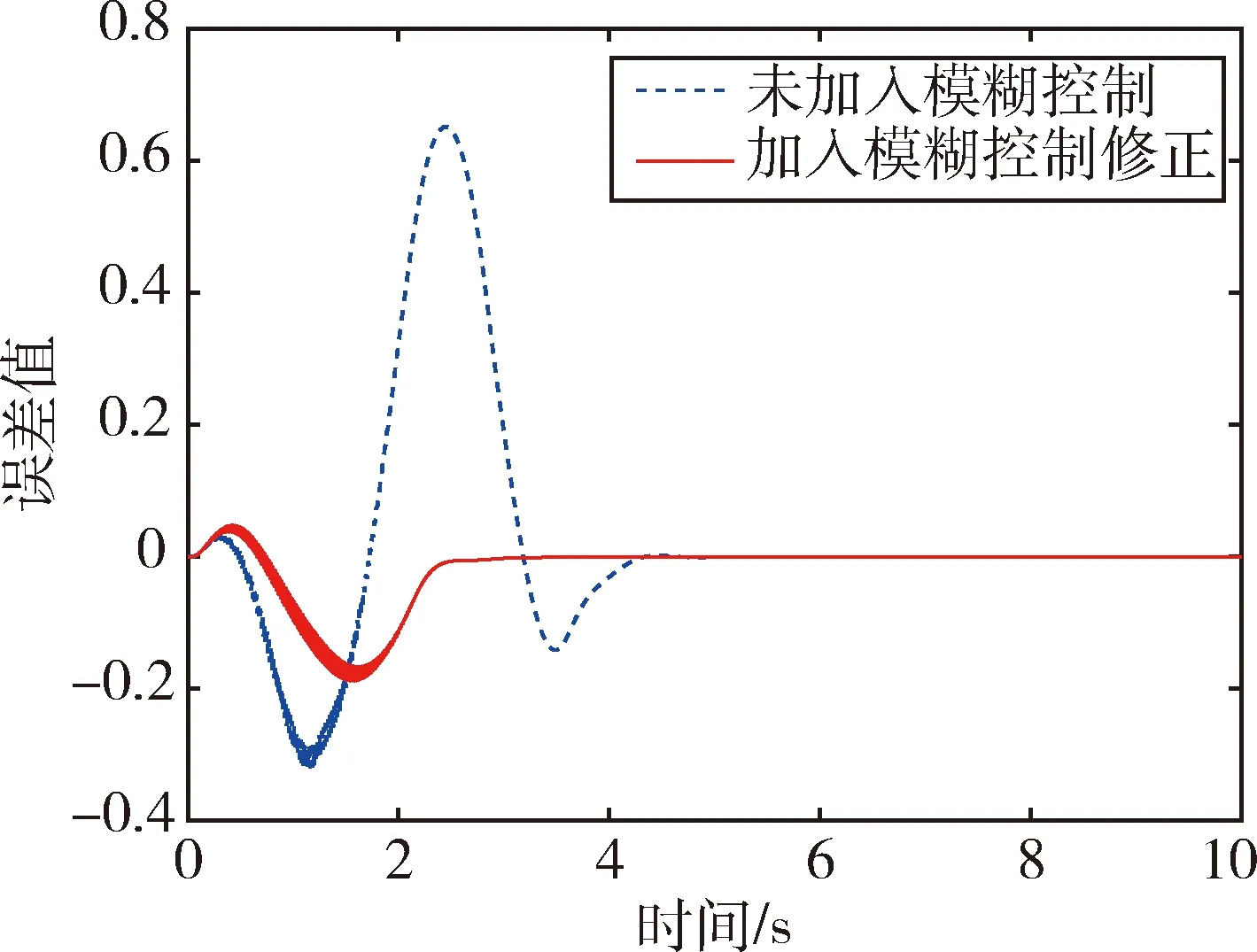
图6 纵向位移偏差对比图
工况二的仿真结果如图7~9所示.
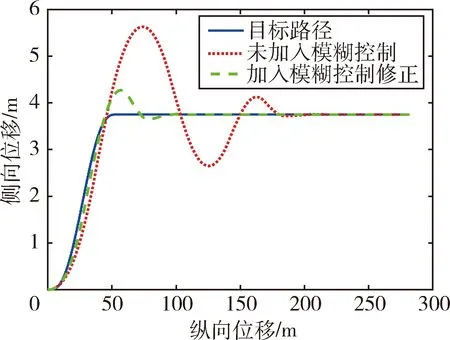
图7 行驶轨迹对比图
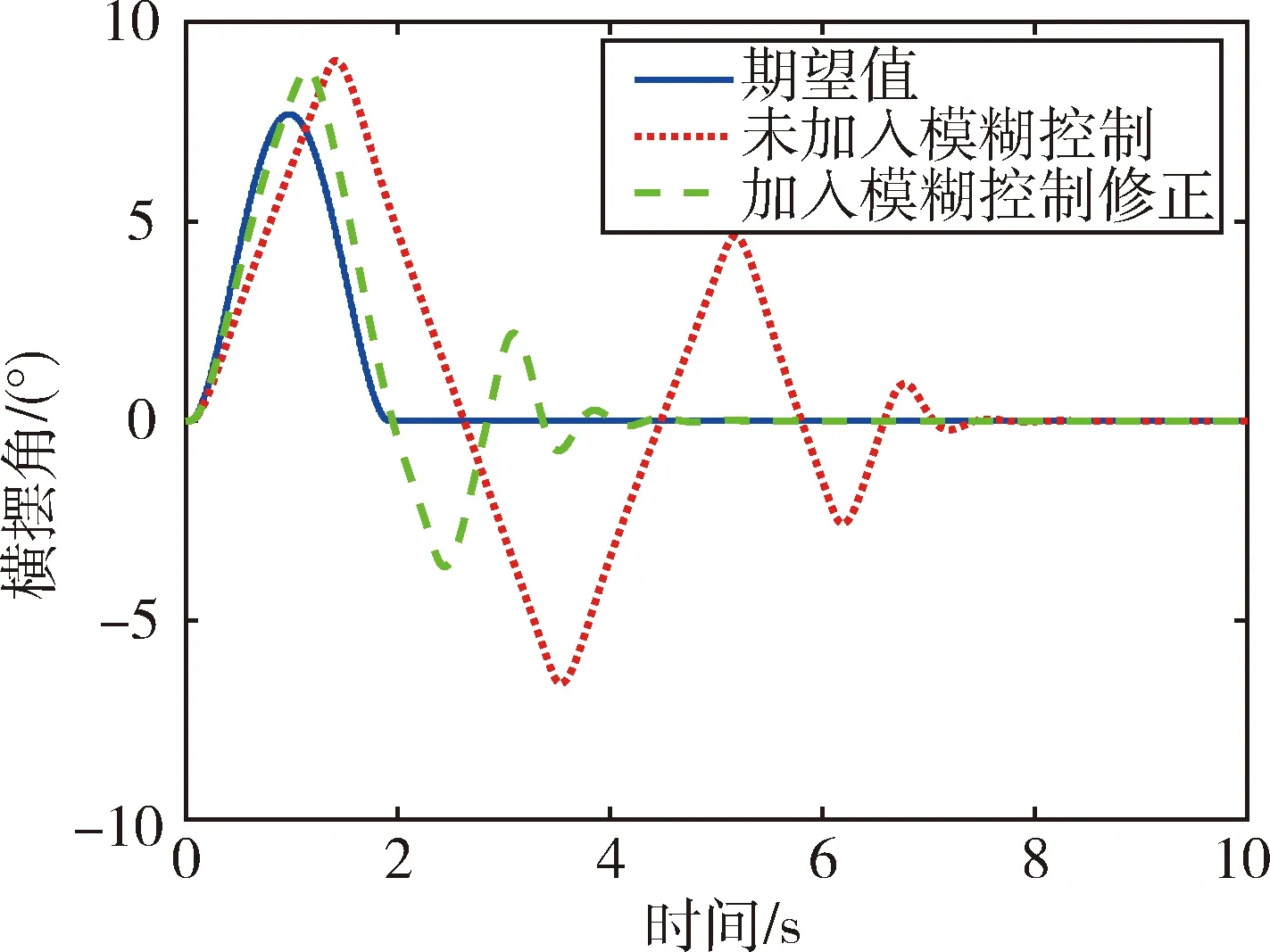
图8 横摆角对比图
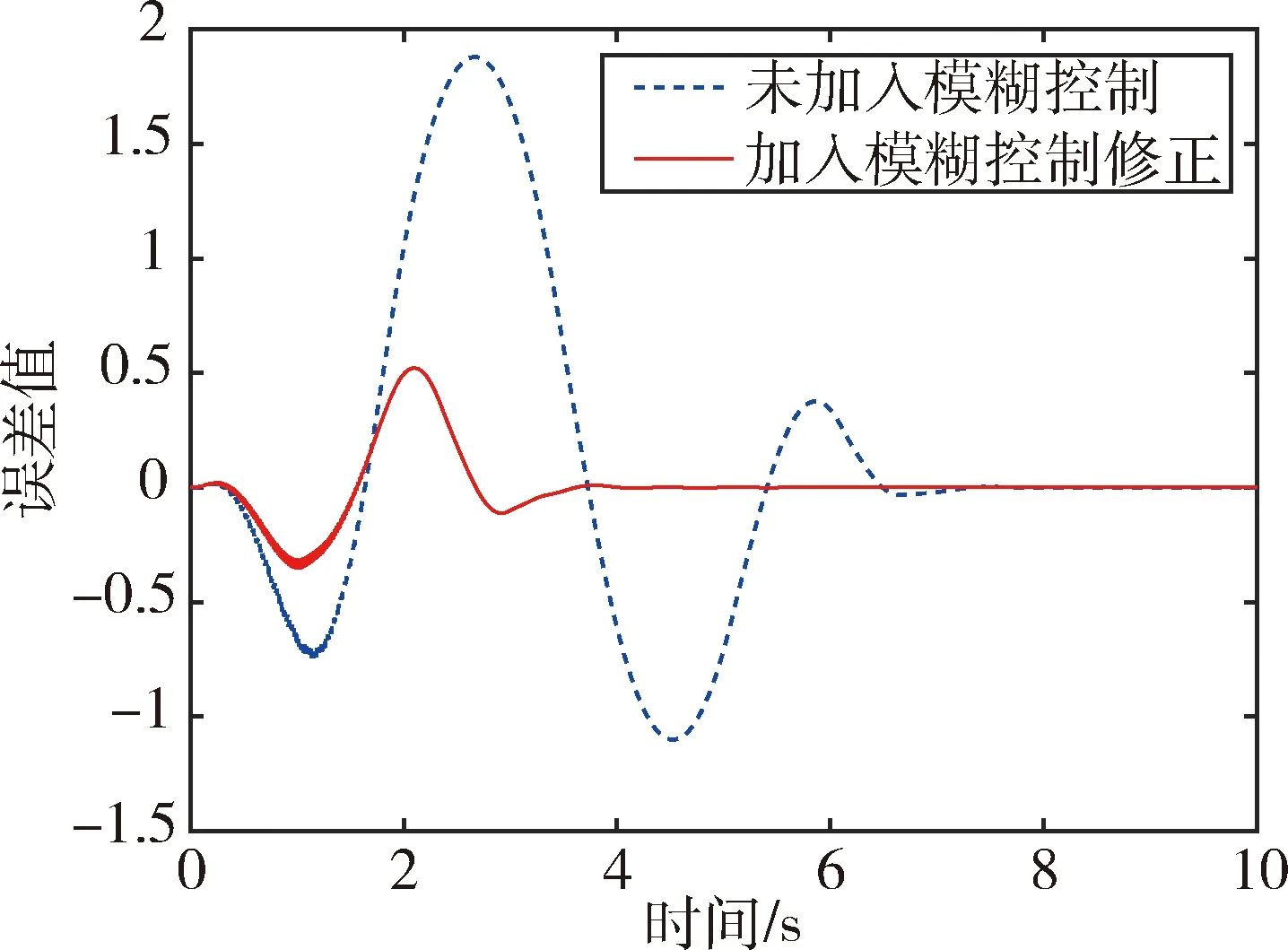
图9 轨迹偏差对比图
工况二为高速工况,由图7和图8可以直观地看出,在110 km/h的高速工况下,与未加入模糊控制相比,基于MPC控制策略的车辆在加入模糊控制修正后,行驶轨迹和横摆角均更加贴近理想曲线;由图6中的纵向位移偏差对比图可知,加入模糊控制后,偏差得到可观减少,最大偏差为0.5 m左右,表明在高速工况下经过模糊控制修正后,车辆路径跟踪效果良好,跟踪精度较高.
5 结 论
文中针对高速转向工况下智能汽车路径跟踪偏差较大的问题,设计了基于MPC和模糊控制的智能汽车路径跟踪策略,基于MPC算法进行路径跟踪可以有效解决诸多非线性约束的问题,实时性较好;模糊控制器以输入量质心侧偏角误差Δβ和横摆角速度误差Δφ为双输入,设计模糊规则,输出额外的横摆力矩ΔM施加至车轮,从而减少轨迹的偏差.通过Matlab /Simulink软件与Carsim软件联合仿真验证可知,在自车以中高速(85 km/h)和高速(110 km/h)行驶进行避障轨迹追踪时,加入模糊控制器后,轨迹偏差均得到了客观较小,提高了跟踪精度,路径跟踪效果良好.