顺岸式边装卸自动化码头人工智能运输机器人(ART)动态泊车设计*
2022-06-29高延辉
张 朋,高延辉,张 煜,唐 欣
(1.天津港第二集装箱码头有限公司,天津 300461;2.武汉理工大学 交通与物流工程学院,湖北 武汉 430063;3.武汉理工大学韶关研究院,广东 韶关 512100)
为提高集装箱码头作业效率,许多学者在码头整体布局和各功能区的规划设计方面做了大量研究。张连钢等[1]使用指数平滑预测算法预估码头吞吐量,并计算出与各功能区域相匹配的生产能力,由此确定功能区域的详细布局,这对国内自动化码头建设和人工码头升级改造具有借鉴意义;熊玲燕等[2]对比了集装箱堆场不同布局形式和设备选型的要求,在考虑青岛港作业特点的基础上,设计出自动化集装堆场垂直布局形式;Miguel等[3]使用层次分析法对码头不同布局方案进行具体分析,设计出一种安全、高效、绿色的危险品集装箱箱区布局方案;潘海青等[4]针对冷藏箱和AGV车辆的供电问题,提出在码头后方辅建区建设自动化充电站的方案,并成功应用于青岛港自动化码头;罗勋杰[5]针对自动化堆场布局及设备作业管理问题,提出3种轨道吊堆场陆侧交接区标准布置方案,方案涉及交接区形式、尺寸、作业及控制流程,并在洋山四期全自动化集装箱码头成功应用。针对港区交通流管控的研究,元征等[6]提出自动化集装箱码头闸口布局方案,此方案基于港区装卸工艺制定运输车辆调度原则,结合了码头水平运输作业计划,效果最优。
上述研究针对自动化集装箱码头各功能区布局问题进行了重点阐述,尤其在涉及码头堆场布局及水平运输管控方面,但对闲置车辆停车管理及停车区域布局方面的研究较少。笔者以天津港北疆港区C段自动化集装箱码头为研究背景,设计了基于码头整体布局及作业调度的停车位布置方案,并提出一种ART动态泊车策略,制定出闲置ART泊车流程,通过提高闲置ART管理水平改善自动化码头拥堵状况,从不同于智能路径规划的角度出发,可实现ART交通流的进一步改善。
1 码头总体布局
天津港北疆港区C段自动化码头(图1)提出基于人工智能运输机器人(ART)-路-港协同的顺岸式边装卸全自动化码头建设方案,能够在传统码头整体布置的基础上,实现全流程自动化改造升级。同时,该自动化码头还在港区交通管理、车辆管控等方面进行创新,达到装卸运输工艺高效、节能、环保的目的。
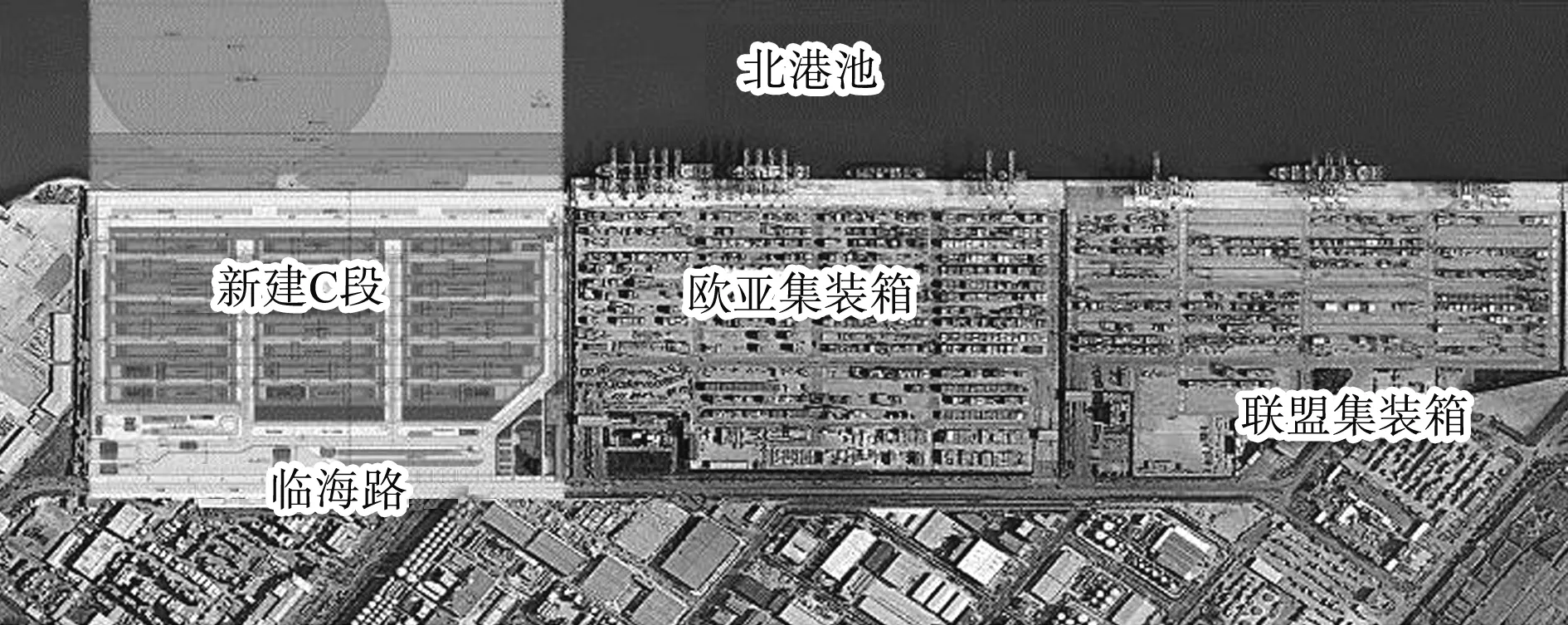
图1 天津港北疆港区C段自动化集装箱码头位置
码头呈满堂式布置(图2),堆场内双悬臂自动化轨道式集装箱龙门起重机(ARMG)行走方向平行于码头岸线,3个泊位共配备12台单小车双20′(6.1 m)岸桥(另外预留2台)。在岸桥海侧轨道处,两轨之间由海侧向陆侧依次布置2条集装箱拖挂车(超限箱、危险品箱)船放作业通道、围栏、6条ART作业车道(其中第1、第4、第6为超车道;第2、第3和第5为装卸作业车道),船放作业通道与自动化作业区通过围栏进行物理隔离,以保障作业安全。岸桥陆侧轨后依次布置1条车道(用于岸桥的检修及更换吊具作业或冷藏箱吊箱门时作为逆向车道使用)、舱盖板堆存区、解挂锁区、ART等待区、4个ART通行车道及ART充电区,其中ART等待区根据作业需求及主力船型靠泊情况,布置8处解挂锁区域,每处解挂锁区均为“2隔离岛+1通行车道”布置形式。

图2 自动化集装箱码头总体布局
从距码头前沿线121 m处开始布置自动化堆场,堆场区按集装箱箱型组成比例布置自动化堆场。自动化堆场空、重箱混堆,共布置8条24个垛区,占用陆域纵深441.5 m,其中冷藏箱分3块分散布置;自动化堆场装卸设备采用双悬臂ARMG,轨距34 m,起重质量41 t,轨距内布置11排箱,堆箱高度“堆6过7”,共配备42台(另外预留9台),ARMG两侧悬臂下各布置1条作业车道及1条超车道。
码头内部交通管理方面,装卸船ART及集疏运外集卡车流设计为分道隔离运行(图3)。纵向主干道分道通过物理隔离实现,外集卡从进闸口至堆场提送箱作业形成外圈顺时针环路,ART码头装卸船至堆场装卸箱形成内圈逆时针环路;横向装卸车道分道亦通过物理隔离实现,为减少ART及外集卡从纵向车道入横向装卸车道的交叉点,设计相邻两台双悬臂ARMG之间布置同种类型集卡车道,布置形式为“1条作业车道+2条超车道+1条作业车道”,堆场间按照ART-外集卡车道交替布置。为保证行车安全,横纵向ART与外集卡交叉点通过智能交通管控系统进行交通管理,即于通行交叉点处增设智能交通灯和抬杆,ART通行次序优先于外集卡,ART接收系统指令后,利用自身感知系统先判断后通行。
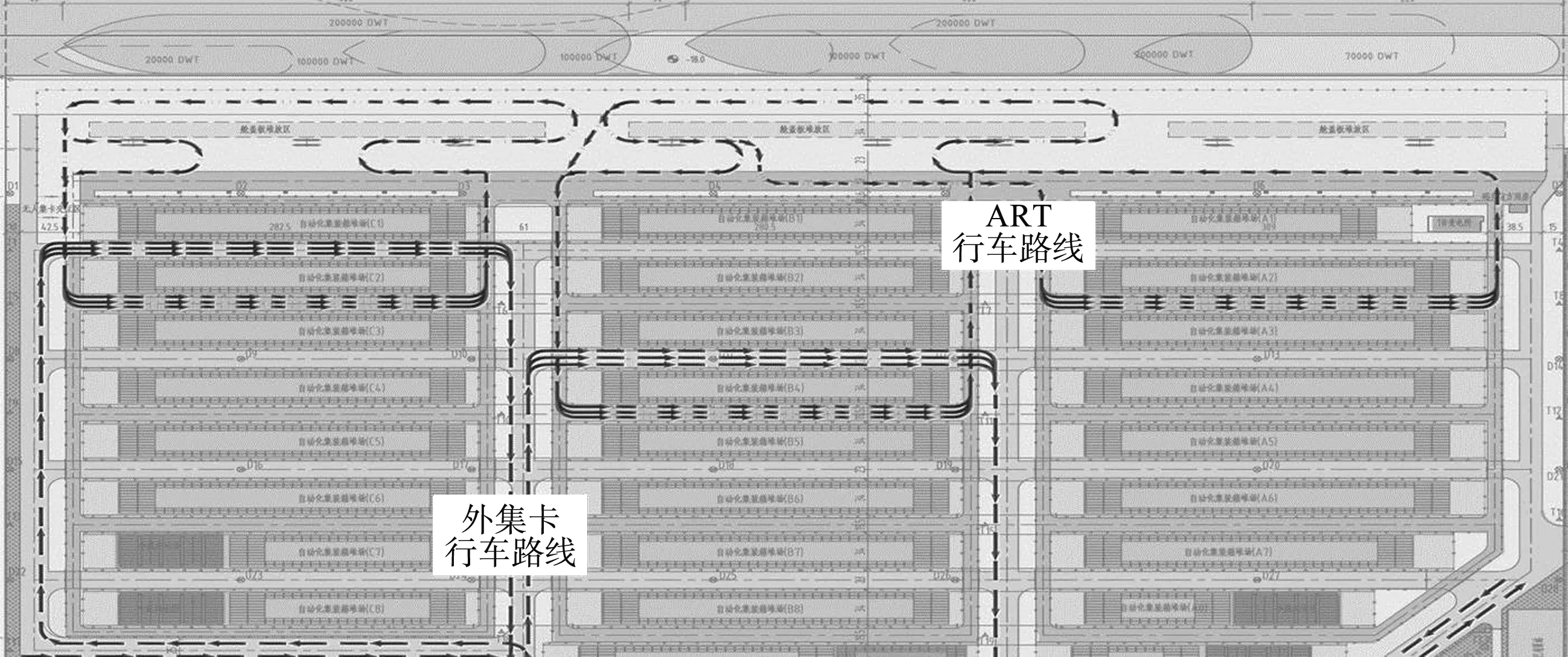
图3 ART及外集卡行车路线
2 停车功能模块
结合码头“顺岸式布置+ART水平运输+堆场边装卸”的总体布置方案,ART动态泊车设计方案通过4个模块实现停车管理:停车区设置模块将智能化码头划分出多个停车区;停车优先级设置模块根据ART作业特点优先分配有利于后续作业的泊位;停车数量及规则设置模块合理规划停车区布局;多场景停车规则管控模块可实现ART在不同场景的高效停车管理。4个模块之间的逻辑关系如图4所示。
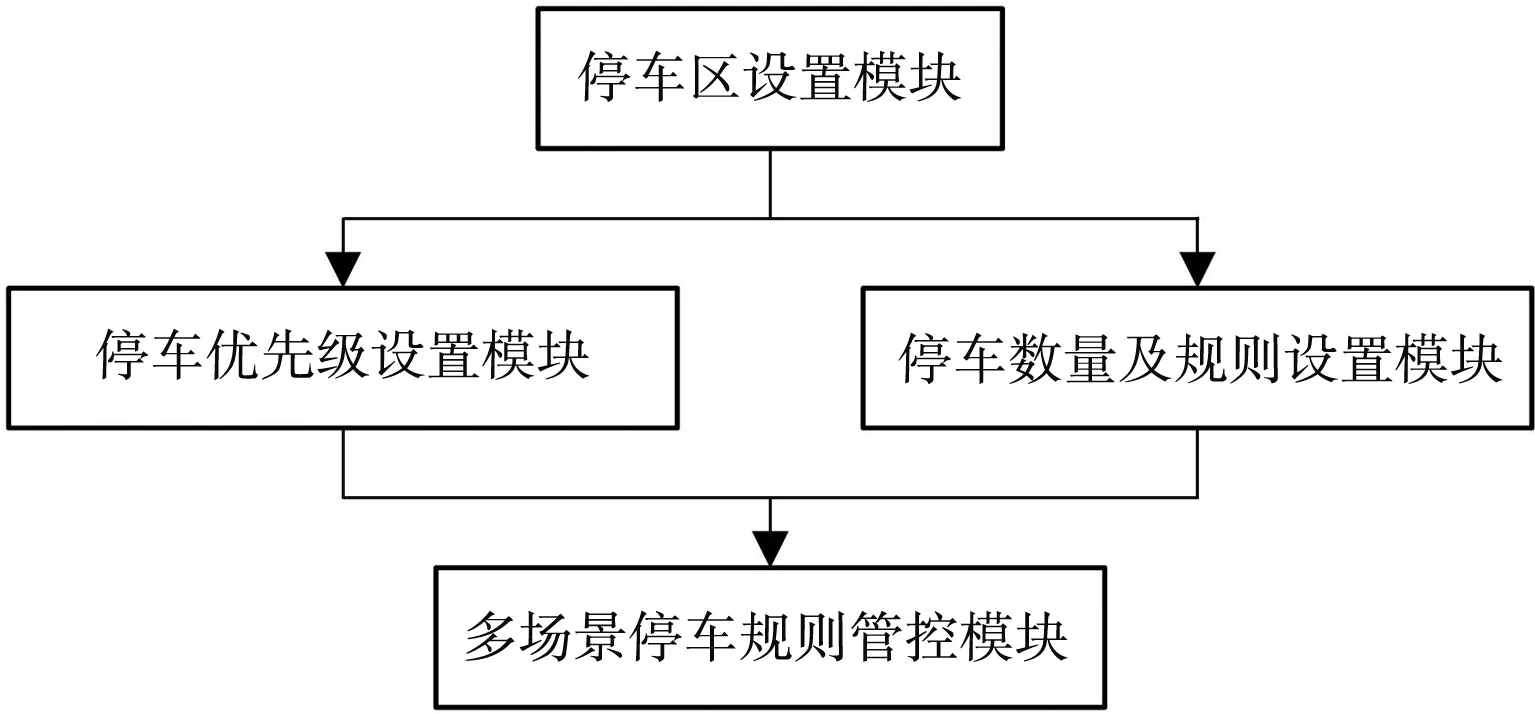
图4 停车模块逻辑关系
2.1 停车区设置模块及优先级设置模块
停车区设置模块将码头划分出6个停车区(图5),停车区从上至下分别为:闲置泊位岸桥跨内车道停车区、闲置泊位岸桥跨后舱盖区停车区、A/C场充电位停车区、B1场上方充电车道停车区、B9场预留堆场作业车道停车区、A9场预留堆场作业车道停车区。

图5 停车区布局
停车优先级设置模块根据停车区实时信息为ART分配停车位,停车区优先级由高到低依次是A/C场充电位、岸桥跨内车道、岸桥跨后舱盖区、B1场上方充电车道、B9场作业车道、A9场作业车道。
2.2 停车数量及规则设置模块
停车数量及规则设置模块为适应码头实际作业情况,提供紧凑和自由进出2种停车模式。紧凑模式下相邻2个停车位前沿间距小于30 m,只有当相邻停车位中前停车位内无ART停靠时,后停车位内ART才能驶离;自由进出模式下停车位前沿间距大于30 m,间距设置符合ART运动学特征要求,相邻停车位内ART互不影响。
结合停车区位置结构和ART实际作业情况,在不同停车区设置不同的停车数量和规则。不同停车区泊位数量如表1所示。

表1 泊位数量
1)闲置泊位岸桥跨内车道停车区,自由进出模式下停车位间隔15 m,300 m规格泊位对应车道,每道可放置8部,1、3、5道共可放置24部,400 m规格泊位对应车道,每道可放置11部ART,共可停放33部。
2)在舱盖区对应泊位未有船舶作业且未被舱盖覆盖时,舱盖区可作泊车区域。舱盖区停车区采取自由进出模式,停车位间隔15 m,舱盖区可分为两道停车道和两道超车道,300 m规格泊位对应车道,每道可放置8部ART,2条车道共可停放16部;400 m规格泊位对应车道,每道可放置11部ART,共可停放22部。
3)ART可在A01和C01场东侧充电区空余车位泊车。在A/C场充电位停车区中,停车位在A/C场上方充电车道分别设置7个,共可停放14部ART。
4)ART可在堆场适当位置停车,采取紧凑模式时,停车位布置间隔5 m,B1场上方充电车道停车区可停放11部ART;B9场作业车道停车区可停放10部ART;A9场作业车道停车区可停放8部ART。在自由进出模式下,停车位布置间隔18 m,B1场上方充电车道停车区可停7部ART;B9场作业车道停车区可停6部ART;A9场作业车道停车区可停5部ART。
2.3 多场景停车规则管控模块
根据码头泊位作业实际情况,多场景停车规划模块考虑了4种场景下的ART停车规则,包括3个泊位闲置、2个泊位闲置、1个泊位闲置和无泊位闲置。不同场景停车规则如下。
1)3个泊位闲置:充电区13个停车位,岸桥下81停车位,舱盖区54个停车位,共148个停车位,可满足76部ART的停放需求;出现1个泊位岸桥及舱盖区占用维修的情况时也可满足停放要求;当出现2个泊位被占用的情况时,启用B1场上方充电车道、B9场(预留)作业车道和A9场(预留)作业车道,并采用紧凑模式,停车位共有82个,可满足停车需求。
2)2个泊位闲置:充电区13个停车位,岸桥下48停车位,舱盖区32个停车位,共92个停车位,满足最多停放66部ART的需求;当1个泊位岸桥及舱盖区占用维修时,启用B1场上方充电车道、B9场(预留)作业车道和A9场(预留)作业车道,采用自由进出模式布置,共有70个停车位,可满足停车需求。
3)1个泊位闲置:充电区13个停车位,岸桥下共计24个停车位,舱盖区16个停车位,共53个停车位,可满足最多停放40部ART的需求;当岸桥及舱盖区占用维修时,启用B1场上方充电车道、B9场(预留)作业车道和A9场(预留)作业车道,采用紧凑模式布置,共有42个停车位,可满足停车需求。
4)无泊位闲置:充电区13个停车位,B1场上方充电车道采用紧凑模式能布置11个停车位,共有24个停车位,可满足最多停放22辆ART的需求,还可启用B9场(预留)作业车道和A9场(预留)作业车道,自由进出模式下增加11个停车位,提高调度灵活性。
上述方案中船舶尺寸较小时,可将剩余闲置泊位划成2段,其中1段用于维修占用,1段用于停车。此优化方案可实现停车位数量的增加,提高调度灵活性。
3 动态泊车
动态泊车设计方案制定了一个泊车策略,策略主要涉及空闲ART在自动化区域内的闲置停车和作业计划的优化管理。在制定策略时,着重考虑停车过程的动态特性,具体表现在临时停车区的时空属性。泊车策略以码头实际情况为前提,进行可得停车区的分区及可停靠车辆数目计算,并给出可得的时间窗范围;根据临时停车区域的时空属性,调整车辆在线和闲置车辆数目,保障作业流畅和作业平衡,尤其是不能影响正常的生产作业和设施设备的正常使用;最后,将闲置车辆分配给不同区域的临时停车区,并满足临时停车区的时间窗要求。
在动态泊车流程中,TOS(terminal operation system,码头操作系统)不进行具体的停车调度,水平运输设备作业完成后,原地等待下一指令,超过设定时间后自行停车,在停车过程中可随时接收TOS新的作业指令。TOS系统为ART分配新的作业任务时,需要重新判断当前泊位的ART是否为完成新任务的最佳设备:若非最佳,需重新分配作业任务;若当前分配计划最佳,则ART立即执行。
结合上述要求,提出动态泊车策略:1)TOS系统收到ART完成作业任务信息,向车队管理系统下发泊车指令;2)TOS系统汇总停车区实时状态信息并发送给车辆管理系统;3)车辆管理系统根据动态高精度地图信息、停车区实时状态信息和ART实时位置信息,结合停车区设置模块、停车优先级设置模块、停车数量及规则设置模块和多场景停车规则模块生成闲置ART最佳泊车方案,并发送至ART;4)ART自主生成考虑车辆动力学特征泊车路径,并发送至车辆管理系统;5)车辆管理系统将ART泊车路径中堆场区关键纵向作业车道(TZ区)发送至TOS系统;6)TOS系统获取ART位置状态信息,生成ART下次作业任务的派发区域,改善ART作业计划。ART动态泊车流程见图6。
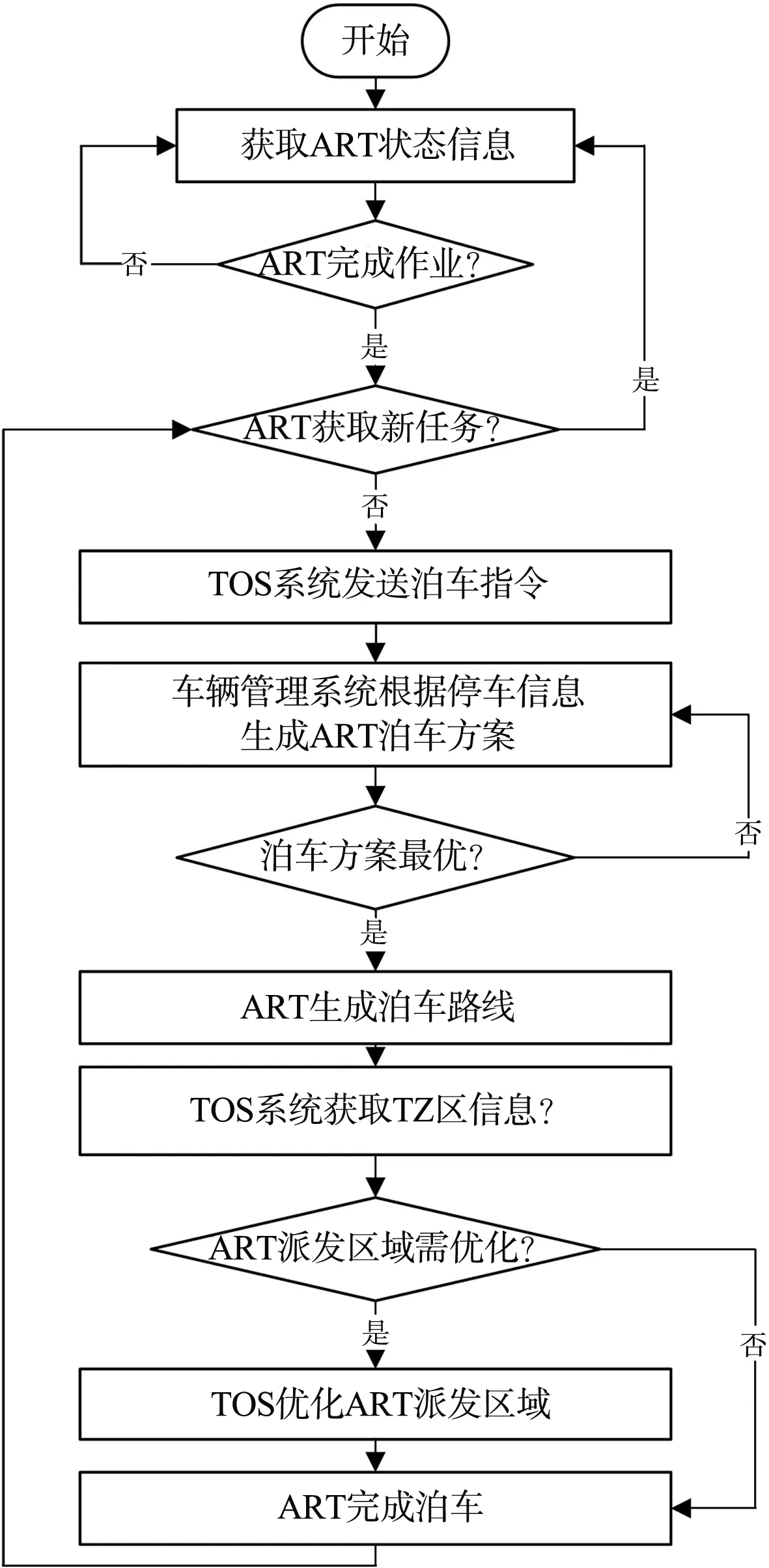
图6 ART动态泊车流程
根据动态泊车流程,天津港设计了一种动态泊车测试软件(图7),主界面以码头布局为背景,仿真码头实际运行状态。同时,实时接收ART路径信息、ART对位信息、告警信息等,可实现禁行区选择、全场紧停等功能。
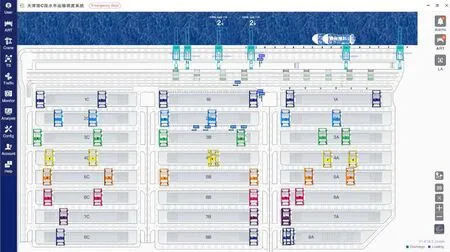
图7 动态泊车测试软件界面
4 结语
1)以码头顺岸式布置、堆场边装卸的工艺方案为研究背景,为传统码头升级改造提供新思路;
2)提出停车区划分的2种模式,设计出码头停车位划分以及停车规则管控方案,满足码头不同作业场景下对停车位的需求,弥补了自动化码头在泊车管理方面研究的空白;
3)ART的动态泊车策略考虑了ART后续作业的便利性,体现出泊车策略的智能特性,保证了码头水平运输作业的高效进行;
4)动态泊车设计包含停车区域规划、动态泊车策略及完整的泊车控制流程,从新的角度改善ART交通流状况,为自动化码头提升水平运输效率的研究提供参考。
