Distributed Fault-Tolerant Consensus Tracking of Multi-Agent Systems Under Cyber-Attacks
2022-06-25ChunLiuBinJiangXiaofanWangHuiliaoYangandShaorongXie
Chun Liu, Bin Jiang,, Xiaofan Wang,, Huiliao Yang, and Shaorong Xie
Abstract—This paper investigates the distributed fault-tolerant consensus tracking problem of nonlinear multi-agent systems with general incipient and abrupt time-varying actuator faults under cyber-attacks. First, a decentralized unknown input observer is established to estimate relative states and actuator faults.Second, the estimated and output neighboring information is combined with distributed fault-tolerant consensus tracking controllers. Criteria of reaching leader-following exponential consensus tracking of multi-agent systems under both connectivity-maintained and connectivity-mixed attacks are derived with average dwelling time, attack frequency, and attack activation rate technique, respectively. Simulation example verifies the effectiveness of the fault-tolerant consensus tracking algorithm.
I. INTRODUCTION
MULTI-AGENT systems (MASs) tracking has been successfully used in many important civil and military applications, such as rigid and flexible spacecrafts,autonomous unmanned aerial vehicles, and mobile robots[1]-[3]. A brief survey of consensus and coordination of MASs was given in [4]. The distributed consensus of the second-order, high-order, homogeneous, and heterogeneous MASs has attracted considerable interest recently [5]-[8].State-based consensus of homogeneous MASs and outputbased consensus of heterogeneous MASs were investigated with event-triggered strategy [7]. Thus, assigning an effective concept of the distributed consensus tracking of MASs is important but challenging.
MASs are vulnerable to network security problems, such as hostile cyber-attacks [9], stealthy attack on remote estimation[10], switching and quantization of nonsmooth behaviors [11],and emergence of sensors on lossy and bandwidth-limited channels [12]. The distributed consensus tracking of MASs requires ideal and accurate information interconnection of individual agents through communication topologies, and the essential issue under cyber-attacks is destroyed. Consensus tracking of MASs under cyber-attacks has been extensively investigated [13]-[16]. The observer-based event-triggered consensus control was developed for discrete-time MASs in the presence of loss sensors and network attacks [14].Specifically, the secure consensus and coordination of cyberphysical MASs under denial-of-service attacks [17], deception attacks [18] and random attacks [19] were investigated.However, for undirected or directed balanced topologies, the consensus tracking problem of MASs under cyber-attacks cannot be directly addressed via the existing methods based on graph theory. Secure consensus tracking was achieved via switching control strategy for linear MASs with the respective paralyzed and maintained networks caused by cyber-attacks[20]. Therefore, developing a novel consensus tracking control protocol for MASs under cyber-attacks via the switching control concept is necessary but challenging.
The intrinsic state evolution of MASs is affected not only by handover topologies subjected to cyber-attacks but also actuator faults occurring on local agents [21]-[26]. Therefore,MASs need to work safely and healthily, and the fault-tolerant consensus tracking control (FCTC) is an effective method for realizing the desired local tolerance and global synchronization of the entire MASs. Development trends and methodologies of cooperative fault-tolerant control of MASs were briefly summarized in [21]. Partial loss of effectiveness and bias faults of leader-following MASs were addressed by the adaptive robust fault-tolerant control strategy [25], [27]. A distributed observer-based FCTC protocol was developed for linear MASs to achieve the global consensus through local estimations and compensate for multiple heterogeneous actuator faults [28]. However, the majority of studies focus on constant or time-varying abrupt actuator faults [22], [29] and ignore incipient and inchoate actuator faults [30]. Notably, a massive collapse of the entire MASs may be caused by individual agents broadcasting early incipient faults to their neighbors through the communication network and ultimately breaking the synchronization of the MASs. On the one hand,most studies on the FCTC scheme in a distributed manner are either based on neighborhood state information [22], [23],[28] or state-feedback control gains [25]. The FCTC research on the neighboring output information of MASs has been rarely explored. On the other hand, as a result of the existing distributed FCTC methodology, the observer-based strategy is rarely considered from the fault estimation (FE) system to the tolerance system to construct unmeasurable information of each follower [26]. Moreover, the consensus problem of MASs under cyber-attacks has been investigated [31], but few studies focus on the fault-tolerant consensus tracking community, especially for nonlinear MASs in the presence of general incipient and abrupt time-varying actuator faults as well as cyber-attacks. Actuator faults and denial-of-service attacks in the respective linear MASs [32] and nonlinear MASs [33] were simultaneously solved via the distributed fault-tolerant control method with the dwell time technique.The adaptive fault-tolerant control scheme was developed for MASs with deception attacks in the communication layer and actuator faults in the physical layer in a distributed manner[34]. Therefore, developing an observer-based estimation and tolerance algorithm associated with the distributed output measurements for nonlinear MASs with incipient and abrupt actuator faults is crucial for the tolerance problem of MASs under cyber-attacks.
The distributed FCTC is proposed for nonlinear MASs with incipient and abrupt time-varying actuator faults under cyberattacks. First, the actuator fault and cyber-attack models(connectivity-maintained, connectivity-paralyzed and connectivity-mixed attacks) are established. Second, the unknown input observer (UIO) [26], [29] in decentralized FE is developed to estimate the unmeasurable state and fault information. Finally, two sufficient conditions with attack frequency,activation rate, and average dwelling time (ADT) technique[17], [20], [33] are given to achieve the exponential consensus tracking of leader-following MASs.
The major contributions of this study are summarized as follows. 1) In comparison with the cooperative consensus of MASs under independent cyber-attacks [13], [31] or the FCTC of MASs under traditional abrupt bounded faults [28], [29],this study attempts to combine network anti-attack and faulttolerant control technologies effectively. By virtue of the switching topology theory [7], [20], it is a brand-new attempt to address the different types of constraints of self-dynamics(general incipient and abrupt time-varying actuator faults) in physical hierarchy and maintained/paralyzed links (connectivity-mixed attacks) in networked hierarchy in an integrated FE-based distributed FCTC framework. 2) Unlike local state information [22], [23] and direct state-feedback protocols[25], [33] of neighboring agents, a novel control structure is proposed with the effective combination advantages of local fault/state estimation in the decentralized UIO-based FE and adjacent output information in the distributed FCTC to ensure the exponential consensus tracking of nonlinear leader-following MASs. 3) For connectivity-maintained attacks, dual metrics(attack frequency and attack duration) in [17] are circumvented and replaced by a single constrained metric (ADT) to realize secure consensus tracking with less computing resources. For connectivity-mixed attacks, the ADT switching between stable and unstable sub-topologies [20], [33] is evaded and replaced by multi-constraint metrics (attack frequency,activation rate and upper and lower bounds of FCTC parameters) to deal with faults and cyber-attacks simultaneously.
The remainder of this study is structured as follows. Preliminaries and problem formulation are presented in Section II.The decentralized FE and distributed FCTC designs for leaderfollowing MASs under cyber-attacks are discussed in Sections III and IV, respectively. Simulations are provided in Section V to illustrate the effectiveness of the FCTC strategy.Finally, conclusions of this study are drawn in Section VI.
II. PRELIMINARIES AND PROBLEM FORMULATION
A. Graph Theory
B. MASs With Actuator Fault Modeling
C. Cyber-Attack Modeling
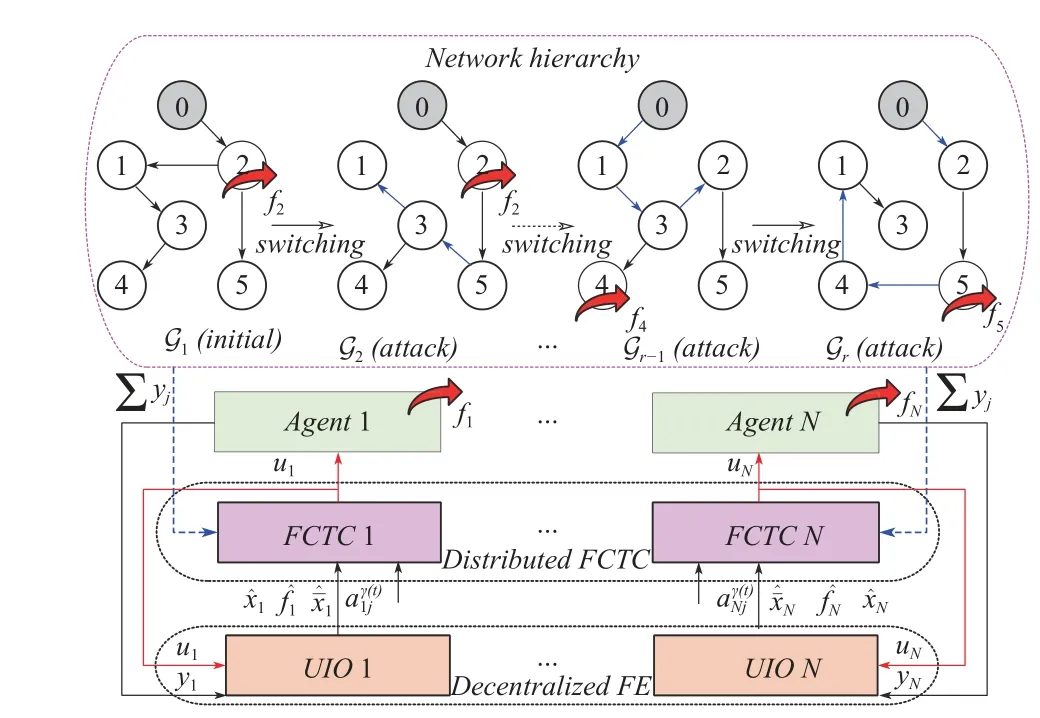
Fig. 1. The structure with FE, FCTC, and network hierarchies.
III. DECENTRALIZED FAULT ESTIMATION DESIGN
A. Case I: Connectivity-Maintained Attacks

B. Case II: Connectivity-Mixed Attacks
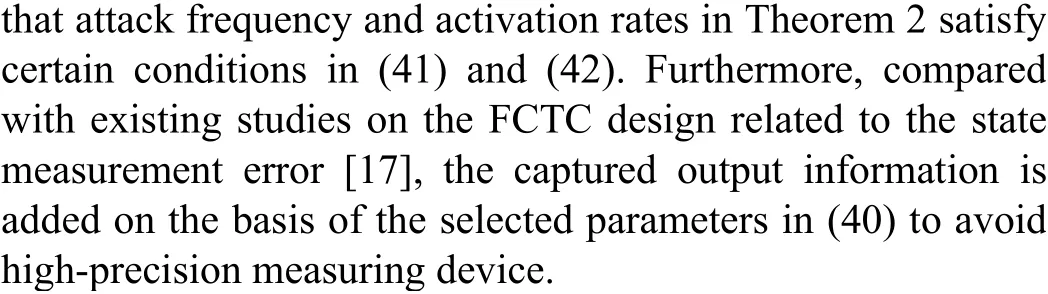
V. SIMULATION RESULTS
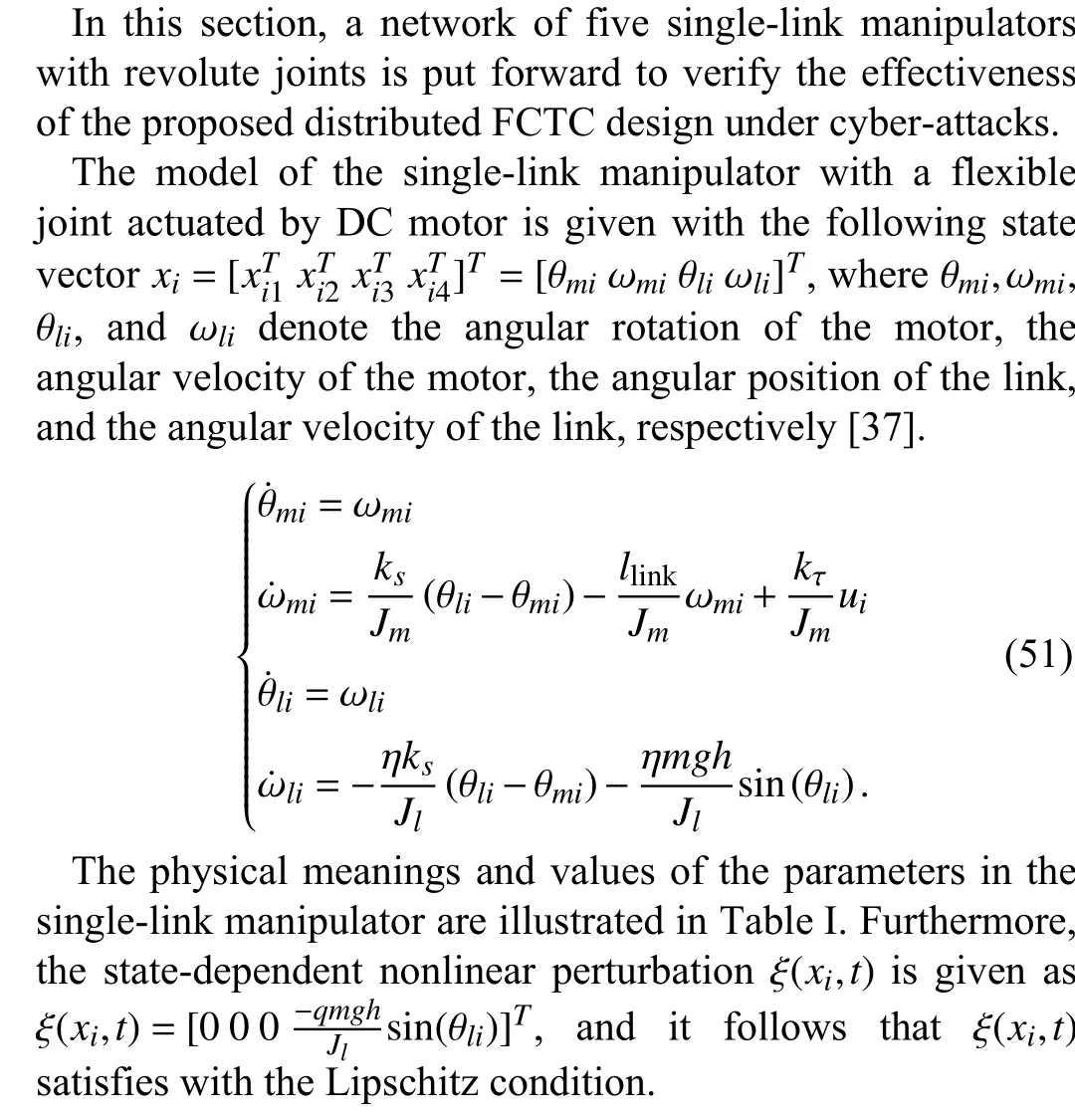
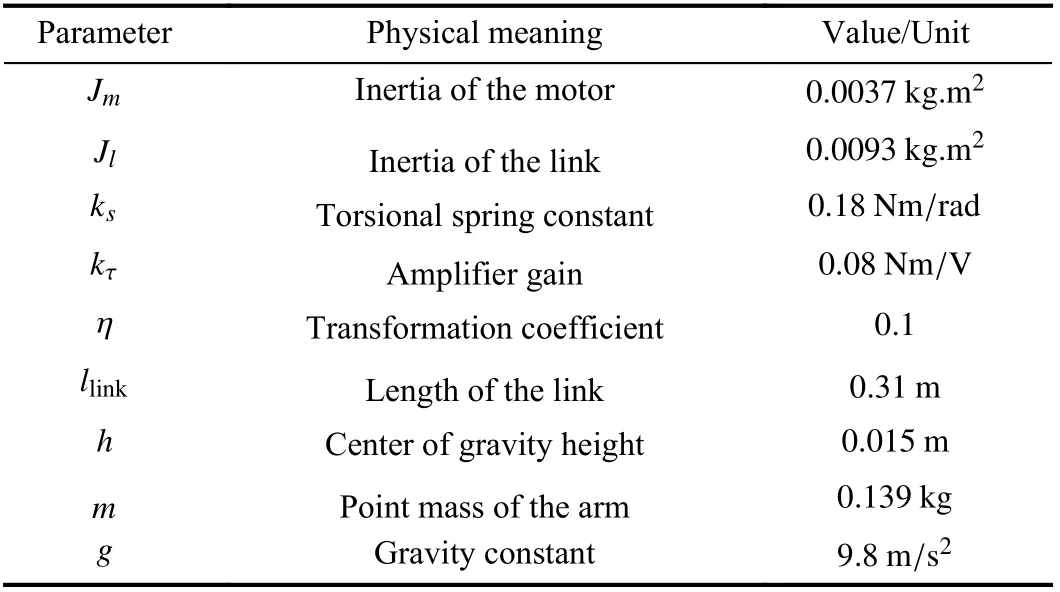
TABLE I THE PHYSICAL PARAMETERS OF THE SINGLE-LINK MANIPULATOR [37]
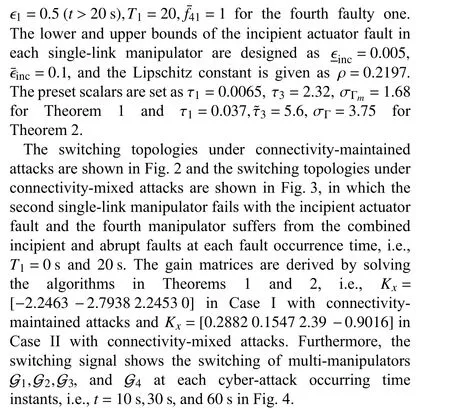
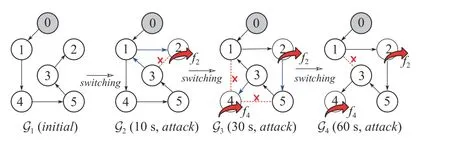
Fig. 2. The switching topologies under connectivity-maintained attacks.
Fig. 3. The switching topologies under connectivity-mixed attacks.
In the presence of the incipient and abrupt actuator faults,the results in Figs. 5-8 under connectivity-maintained attacks(Case I) and in Figs. 9-12 under connectivity-mixed attacks(Case II) validate the effectiveness of the proposed distributed FCTC algorithms in Theorems 1 and 2. The respective angular rotation trackingxi1-x01and the angular velocity trackingxi2-x02,i=1,...,5of each motor under connectivitymaintained attacks are depicted in Figs. 5 and 6. The respective angular position trackingxi3-x03and the angular velocity trackingxi4-x04,i=1,...,5 of each link in the single-link manipulator system under connectivity-maintained attacks are shown in Figs. 7 and 8. The incipient actuator fault of the second manipulator has influenced the state tracking errors, while the abrupt fault of the fourth manipulator in20 s has the greatest influence on the angular velocity tracking of the motor and the least influence on the angular position tracking of the link. Due to the connectivity-maintained attacks in 10 s, 30 s, and 60 s of Case I, severe oscillation convergence with different amplitudes is formed with the topological interconnection, and finally the consensus of state tracking errors is achieved with the distributed FCTC algorithm. Furthermore, the respective angular rotation trackingxi1-x01, the angular velocity trackingxi2-x02of each motor, the angular position trackingxi3-x03and the angular velocity trackingxi4-x04,i=1,...,5 of each link under connectivity-mixed attacks are illustrated in Figs. 9-12.All these figures show that the angular position and velocity tracking can converge asymptotically in spite of incipient and abrupt faults in the second and fourth manipulators. It is worth noting that despite the connectivity-mixed attacks in Case II,the dynamic convergence duration time of the single-link manipulator system is prolonged in 1 0 s,30 s, and 60 s under the action of topological recovery mechanism. Multiple switchings in 1 0 s-3 0 s and 30 s-6 0 s also cause angular and angular velocity tracking error fluctuations of each motor and link, which can gradually converge by the proposed distributed FCTC algorithm.
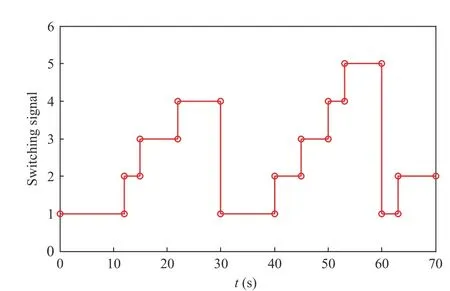
Fig. 4. Topology switching signal.
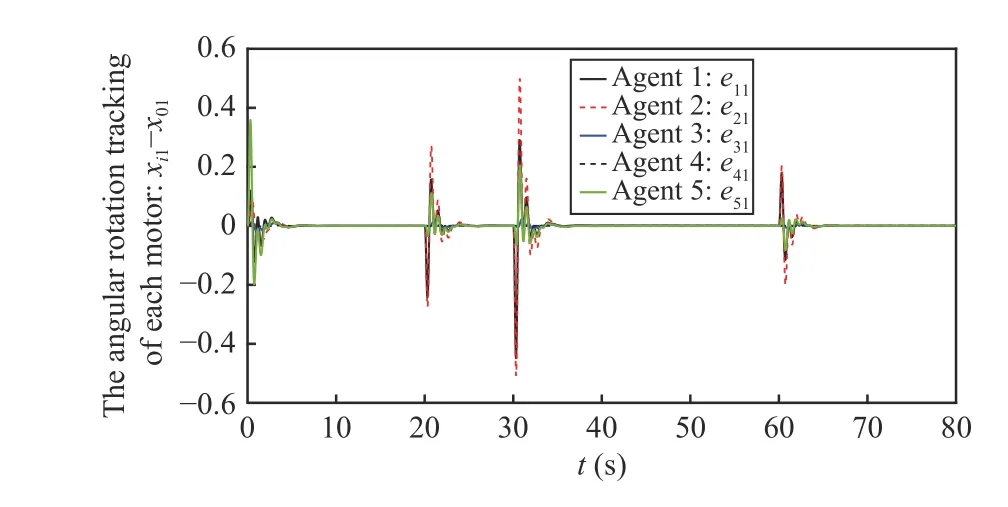
Fig. 5. The angular rotation tracking of each motor:xi1-x01,i=1,...,5 under connectivity-maintained attacks.
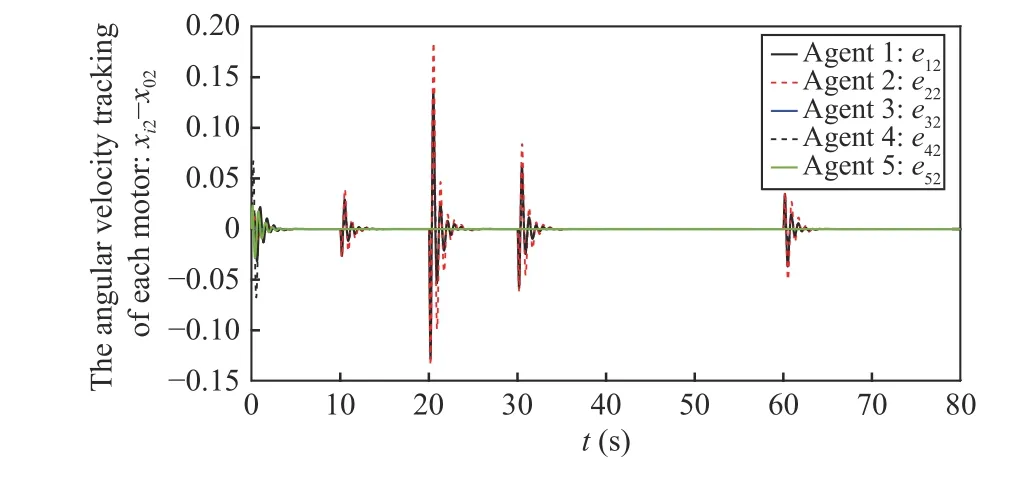
Fig. 6. The angular velocity tracking of each motor:xi2-x02,i=1,...,5 under connectivity-maintained attacks.
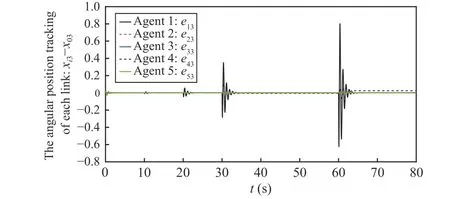
Fig. 7. The angular position tracking of each link:xi3-x03,i=1,...,5 under connectivity-maintained attacks.
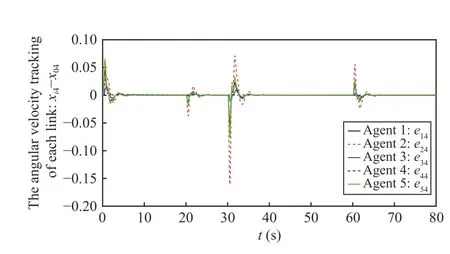
Fig. 8. The angular velocity tracking of each link:xi4-x04,i=1,...,5 under connectivity-maintained attacks.
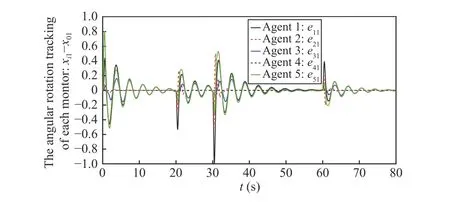
Fig. 9. The angular rotation tracking of each motor:xi1-x01,i=1,...,5 under connectivity-mixed attacks.
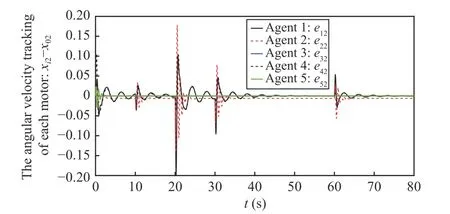
Fig. 10. The angular velocity tracking of each motor:xi2-x02,i=1,...,5 under connectivity-mixed attacks.
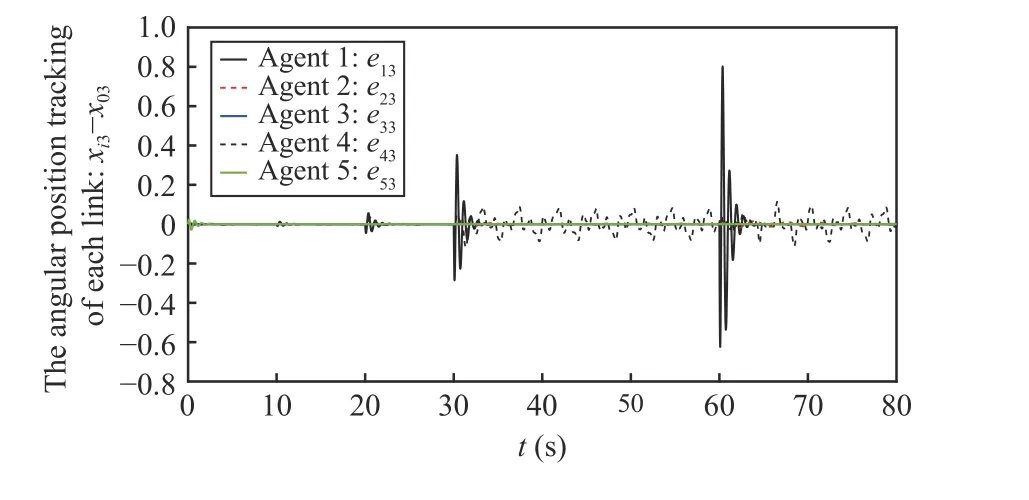
Fig. 11. The angular position tracking of each link:xi3-x03,i=1,...,5 under connectivity-mixed attacks.
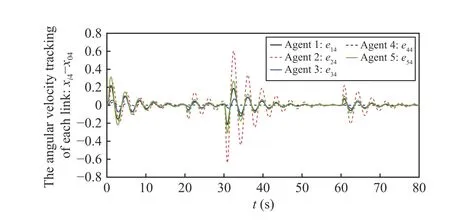
Fig. 12. The angular velocity tracking of each link:xi4-x04,i=1,...,5 under connectivity-mixed attacks.
Fig. 13 shows the rated and estimated incipient faults of the second manipulator and the combined incipient and abrupt faults of the fourth manipulator. Compared with our previous hierarchical FE and fault-tolerant control scheme [26], the proposed FE scheme in the distributed FCTC algorithm has smaller estimation error and better robustness at each cyberattack occurring time instants. Fig. 14 depicts the rated and estimated values under the considered connectivitymaintained attacks without fault, the connectivity-mixed attacks with incipient fault and abrupt fault, respectively. In this case, our previous FE/fault-tolerant algorithm [26] cannot achieve an excellent estimation effect, and the phenomenon of continuous non-dissipation oscillation or deviation occurs under the considered connectivity-mixed attacks.
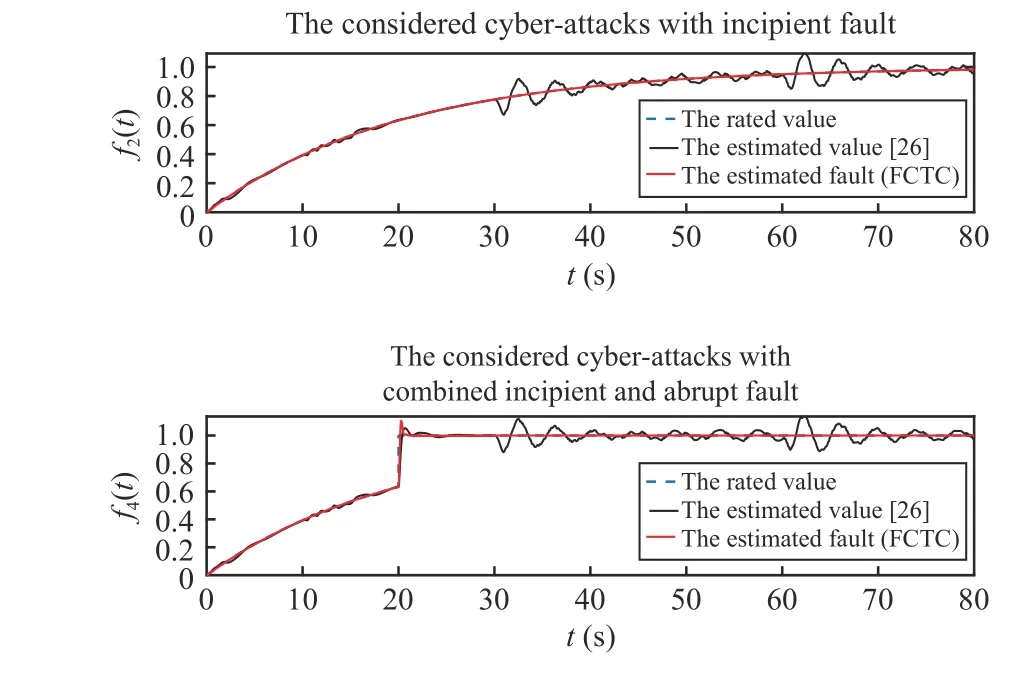
Fig. 13. The rated fault, the estimated fault [26], and the estimated fault(FCTC algorithm) under cyber-attacks.
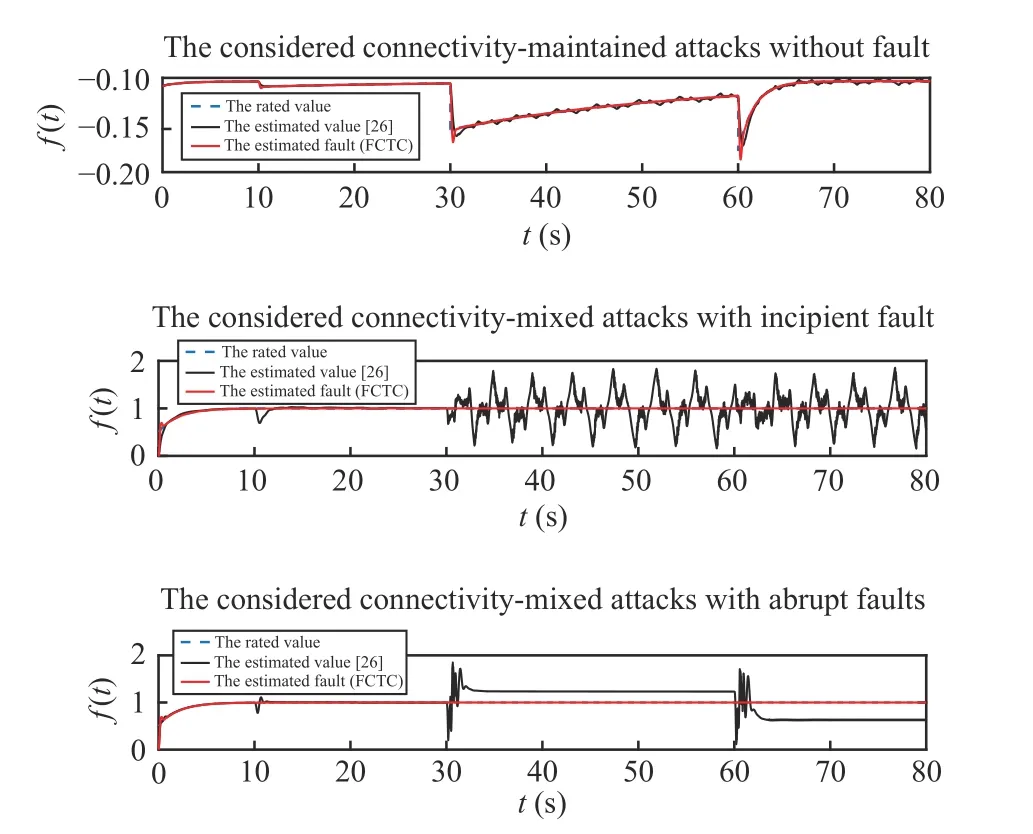
Fig. 14. The comparisons of the considered connectivity-maintained attacks without fault, connectivity-mixed attacks with incipient fault and abrupt fault.
VI. CONCLUSION
A novel UIO-based FE and FCTC method was proposed in this study to ensure that nonlinear leader-following MASs can realize the exponential consensus tracking objective regardless of incipient/abrupt actuator faults and cyber-attacks.Distributed FCTC protocols based on fault and state estimations from the decentralized FE hierarchy and the relative adjacent output information of each individual agent were proposed in connectivity-maintained and connectivitymixed attack cases. Two sufficient criteria utilizing the ADT,attack frequency, and attack activation rate method were proposed to ensure the prescribed consensus tracking performance. Multistep calculations were demonstrated to derive parameters in decentralized FE and distributed FCTC algorithms for both cases. Simulations proved the effectiveness of the proposed FCTC scheme. Future studies could fruitfully explore the consensus tracking issue of heterogeneous nonlinear MASs subject to complicated timevarying actuator and sensor faults in physical hierarchy and hostile DoS attacks in networked hierarchy further by the improved distributed event-triggered FCTC scheme with a substantial reduction in computational resources when message transmission fails intermittently.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Exponential Continuous Non-Parametric Neural Identifier With Predefined Convergence Velocity
- Exploring Image Generation for UAV Change Detection
- Wearable Robots for Human Underwater Movement Ability Enhancement: A Survey
- A Scalable Adaptive Approach to Multi-Vehicle Formation Control with Obstacle Avoidance
- Fuzzy Set-Membership Filtering for Discrete-Time Nonlinear Systems
- Adaptive Control With Guaranteed Transient Behavior and Zero Steady-State Error for Systems With Time-Varying Parameters