Variance-Constrained Filtering Fusion for Nonlinear Cyber-Physical Systems With the Denial-of-Service Attacks and Stochastic Communication Protocol
2022-06-25HangGengZidongWangYunChenXiaojianYiandYuhuaChengSinior
Hang Geng,, Zidong Wang,, Yun Chen, Xiaojian Yi, and Yuhua Cheng, Sinior
Abstract—In this paper, a new filtering fusion problem is studied for nonlinear cyber-physical systems under errorvariance constraints and denial-of-service attacks. To prevent data collision and reduce communication cost, the stochastic communication protocol is adopted in the sensor-to-filter channels to regulate the transmission order of sensors. Each sensor is allowed to enter the network according to the transmission priority decided by a set of independent and identicallydistributed random variables. From the defenders’ view, the occurrence of the denial-of-service attack is governed by the randomly Bernoulli-distributed sequence. At the local filtering stage, a set of variance-constrained local filters are designed where the upper bounds (on the filtering error covariances) are first acquired and later minimized by appropriately designing filter parameters. At the fusion stage, all local estimates and error covariances are combined to develop a variance-constrained fusion estimator under the federated fusion rule. Furthermore,the performance of the fusion estimator is examined by studying the boundedness of the fused error covariance. A simulation example is finally presented to demonstrate the effectiveness of the proposed fusion estimator.
1. INTRODUCTION
IN general, cyber-physical systems (CPSs) encompass a wide collection of physical and computer infrastructures/components that are connected and intertwined with each other in a cooperative way. Typical examples of CPSs include smart grids [1], [2], water plants [3], [4], robotics systems [5],[6], tracking systems [7]-[9], etc. The real-world implementation of CPSs often requires system components to operate on a shared communication network [10]-[13] which, unfortunately, results in a higher chance of malicious cyber-attacks towards control commands and system outputs. In order to safely and efficiently carry out the desired cyber-physical process, increasing research efforts have recently been made on the secure filtering/control problems for CPSs under deception attacks, replay attacks and denial-of-service (DoS)attacks [14]-[19].
It should be pointed out that most CPS-related literature has been concerned with filtering/control problems for linear systems only despite the fact that practical CPSs often exhibit inherently nonlinear characteristics [20]-[24]. Clearly, the underlying nonlinearities with the CPSs would inevitably bring in substantial challenges to the development of the filtering/control algorithms [25]. Note that the cooperative control problem has recently been studied in [26] for nonlinear CPSs subject to multiple DoS attacks. Although the filtering problem for nonlinear CPSs has drawn some preliminary attention, the corresponding results have not and the filtering error covariance is of a major concern, and this constitutes one of our motivations to look into varianceconstrained filter design for a class of nonlinear CPSs.
In response to rapid advancement in technologies involving data sensing, acquisition and analysis, the so-called multisensor filtering fusion problem has attracted unprecedented attention in a wide variety of fields ranging from signal processing to target tracking, see e.g., [27]-[32]. In the context of multi-sensor filtering fusion, it is often the case that the sensors send their respective measurements to remote filters simultaneously [33]-[36], and such simultaneous communication of big data would undoubtedly lead to excessive data transmission which, in turn, gives rise to serious data collision over communication networks with limited resources[37]. In order to control the data traffic and guarantee fusion performance, an important measure is to introduce certain scheduling rules/protocols to govern sensor communication in the hope of utilizing the limited network resources efficiently.
Regarding the analysis/synthesis issues under communication protocols, a large quantity of research results have recently been attained, and some well-investigated communication protocols include the Round-Robin protocol, the tryonce-discard protocol and the stochastic communication protocol (SCP) [38]-[40]. Among others, the SCP has been deemed to be particularly efficient in assigning network resources because of its dynamic yet stochastic allocation mechanism [41]-[45]. Nevertheless, in relation to nonlinear CPS, the corresponding SCP-based analysis/synthesis results have been very scattered especially when multi-sensor fusion and error-variance constraints are also addressed. Such a lack of adequate results stems mainly from the mathematical challenges in coping with the couplings between the attacking behavior, nonlinear feature, scheduling protocol, variance constraints as well as fusion rule. As such, the motivation arising here is to tackle the variance-constrained filtering fusion problem for nonlinear CPSs under SCP scheduling and DoS attacks.
In this paper, we endeavor to develop a new varianceconstrained fusion estimator for a general class of nonlinear CPSs that encompass the complexities brought from system nonlinearity, SCP scheduling and DoS attacks. To be more specific, a set of variance-constrained local filters is devised by first accommodating the addressed complexities via a dedicated introduced filter structure and then minimizing certain upper bounds on local filtering error covariances. By means of the matrix inequality and stochastic analysis technique, a variance-constrained fusion estimator is put forward through fully integrating the estimates from all local filters and rigorously studying the boundedness of the fused error covariance.
The primary contributions made in this paper are highlighted as follows. 1) A new variance-constrained nonlinear fusion estimator is developed to facilitate the mitigation of the adverse influence induced by system nonlinearity, SCP scheduling and DoS attacks that are embedded in both system and measurement models. 2) A set of minimal upper bounds (on both local and fused error covariances) is found to exist by subtly parameterizing the estimators to cope with the tight couplings (between the system nonlinearity, attacking behavior, scheduling protocol as well as fusion rule). 3) The performance of the designed variance-constrained fusion scheme is thoroughly investigated through establishing the boundedness of the fused error covariance.
The rest of this paper is structured as follows. In Section II,we formulate the considered variance-constrained filtering fusion problem under the SCP and DoS attacks. In Section III,a variance-constrained nonlinear fusion estimator is carefully designed with its parameters determined and performance thoroughly analyzed. In Section IV, a numerical example is given in order to showcase the usefulness of the proposed fusion framework, and a few conclusions are drawn in Section V.
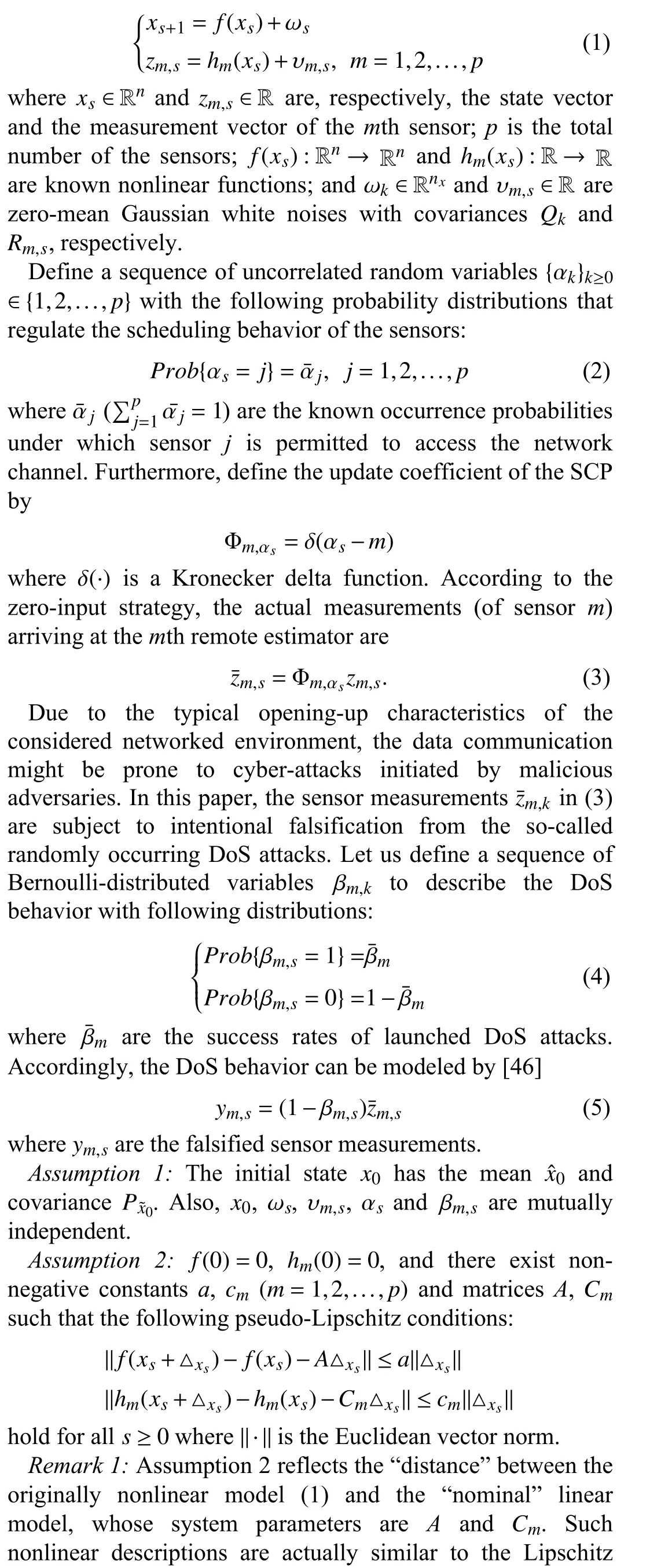
II. PROBLEM FORMULATION
Consider the following nonlinear system:
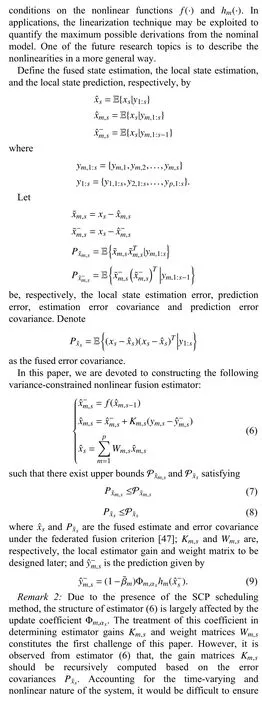
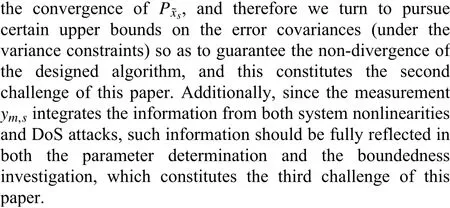
Pertaining to these challenges, our tasks in this paper are to:1) devise the variance-constrained nonlinear fusion estimator(6) by appropriately determining parametersKm,sandWm,s; 2)assess fusion estimation performance through studying the boundedness property of obtained covariance bounds; and 3)study the effects from the system nonlinearities, SCP scheduling and DoS attacks with parameter determination and a boundedness investigation.
III. MAIN RESULTS
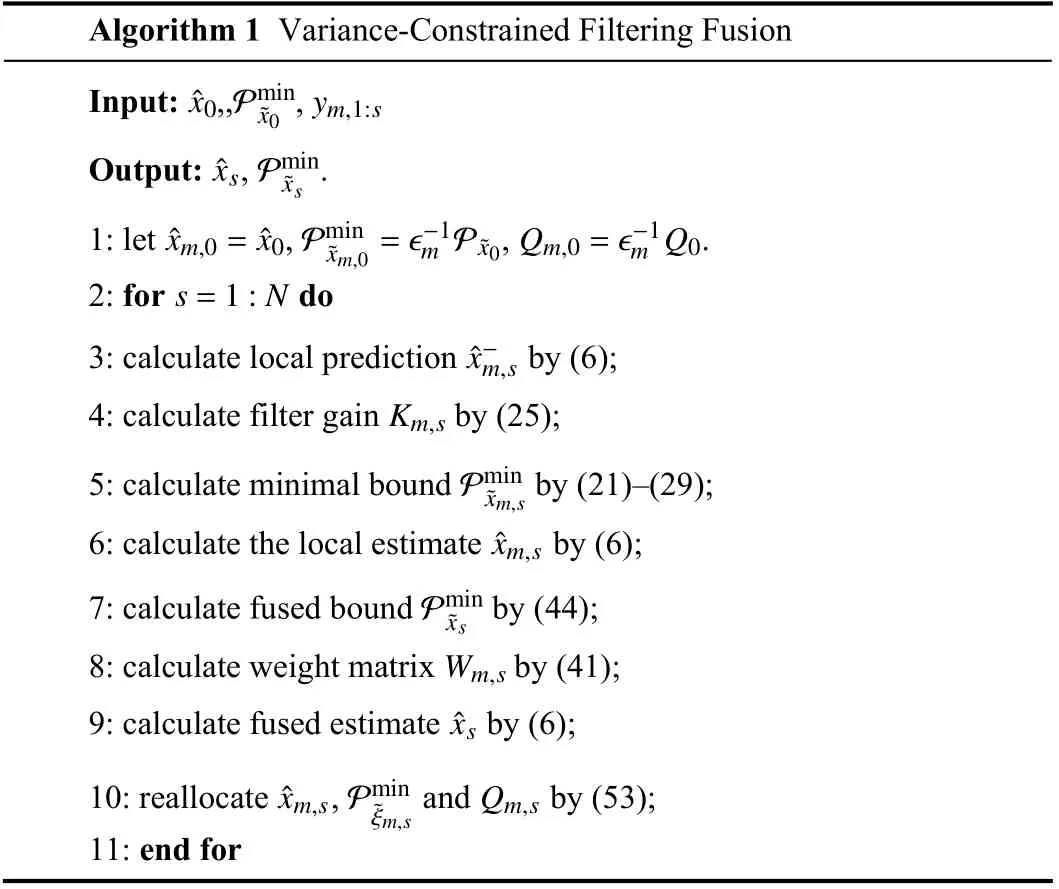
Algorithm 1 Variance-Constrained Filtering Fusion ˆx0 Pmin~x0 ym,1:s Input: ,, ,ˆxs Pmin Output: , .ˆxm,0= ˆx0 Pmin~xs m P~x0 Qm,0=ϵ-1m Q0 1: let , , .~xm,0 =ϵ-1 2: for do s=1:N ˆx-m,s 3: calculate local prediction by (6);4: calculate filter gain by (25);Pmin~xm,s Km,s 5: calculate minimal bound by (21)-(29);ˆxm,s 6: calculate the local estimate by (6);Pmin~xs 7: calculate fused bound by (44);Wm,s 8: calculate weight matrix by (41);ˆxs 9: calculate fused estimate by (6);ˆxm,s Pmin 10: reallocate , and by (53);11: end for~ξm,s Qm,s

Remark 5:In comparison to the available filtering literature on CPSs, our primary results own the following distinctive merits: 1) the addressed problem is new as multiple engineering-oriented phenomena (e.g., the system nonlinearity,cyber-attack and communication protocol) are comprehensively considered; 2) the devised fusion paradigm is new as the variance-constrained estimator is purposely built by means of intensive stochastic analysis; and 3) the performance evaluation is new where boundedness of minimal upper bounds with respect to both fused and local error covariances is rigorously guaranteed.
Remark 6:It can be seen from the design and analysis of the proposed variance-constrained filtering fusion algorithm that,the implementation of such an algorithm involves the calculation of a few matrix equations. Consequently, the computational complexity of the proposed algorithm is highly dependent on both the dimensions of equations and number of decision variables. Generally speaking, there are two effective methods that can be used to reduce the computational complexity of filtering algorithm involving mass matrix operations, i.e., the model reduction method and the suboptimal method. To be specific, the mode reduction refers to the exploration of a possible lower-dimensional model that can be used to replace the original model without adding significant errors in practical applications, while the suboptimal method means that the development of certain suboptimal filtering algorithms might have worse performance but lower computation cost in contrast to the original algorithm. Obviously, in both methods, a proper trade-off between the filtering performance and the computation complexity should be found in order to accomplish the filtering task in an efficient and accurate way.
IV. ILLUSTRATIVE EXAMPLE


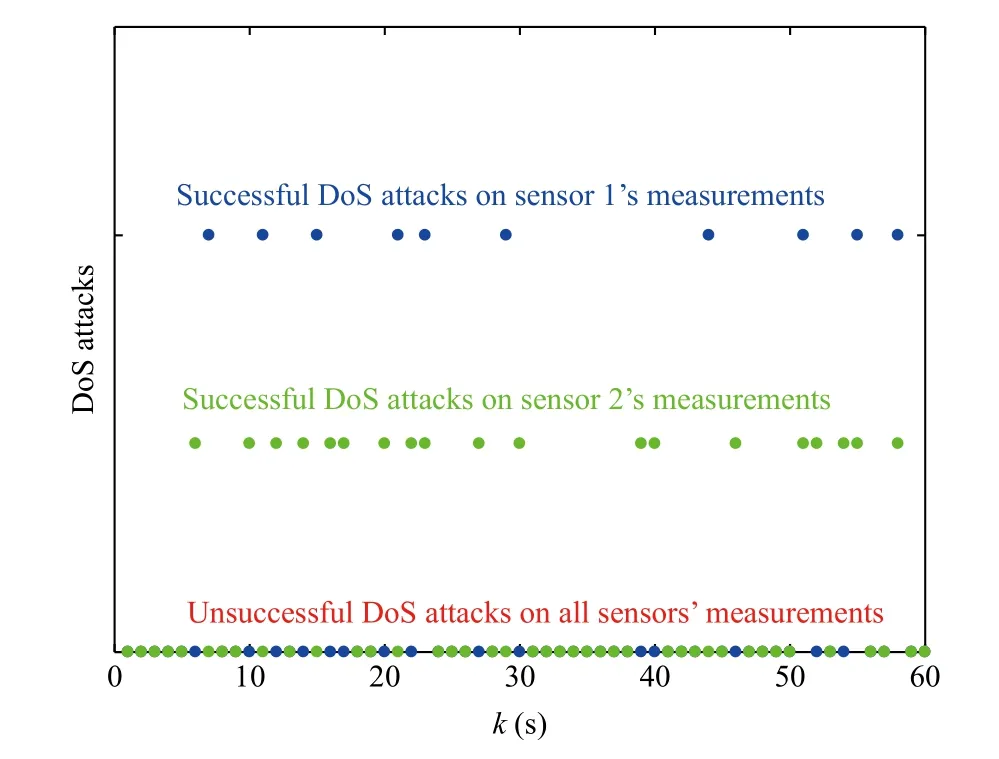
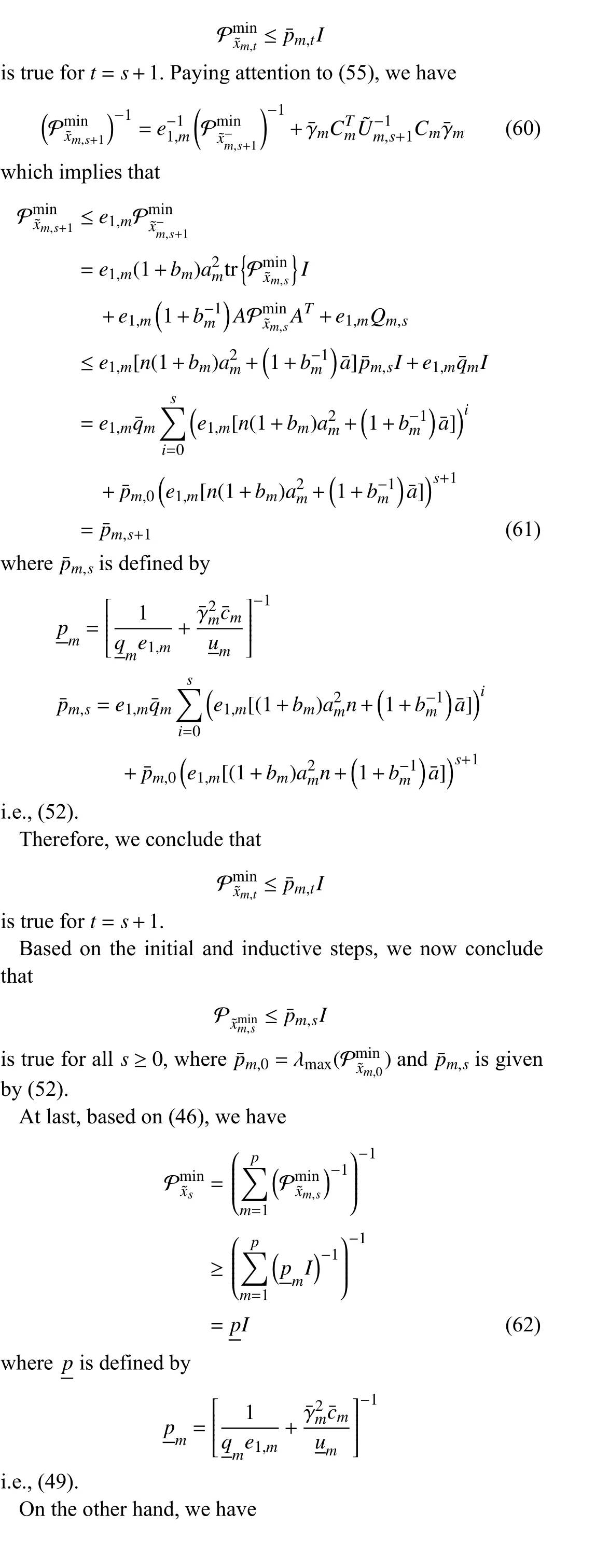
Fig. 1. DoS attacks on two sensors with success rates β ¯1=0.2 and β ¯2=0.3.The blue/green dots on or above the horizontal axis indicate unsuccessful or successful DoS attacks on sensor 1/2 measurements. For instance, at time k, if a blue dot is located on or above the horizontal axis, it indicates that the measurement of sensor 1 is free from or under DoS attacks.
Fig. 2. MSE1 comparison.
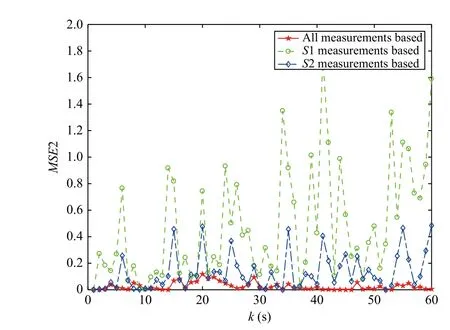
Fig. 3. MSE2 comparison.
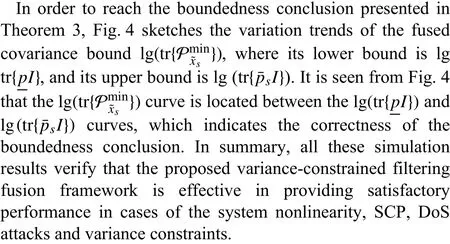
Fig. 4. Comparison between lg( tr{Pmx~sin}) and its bounds.

TABLE I AMSE COMPARISON UNDER DIFFERENT SUCCESS RATES [β¯1,β¯2]

TABLE II AMSE COMPARISON UNDER DIFFERENT OCCURRENCE PROBABILITIES [α¯1,α¯2]
nts, sensor 2 measurements and all measurements, respectively. It is observed from Figs. 2 and 3 that, the tracking performance based on all information outperforms that based on either sensor information. This is because 1) all available data is properly fused to achieve the tracking target in the fusion algorithm; and 2) only partial sensor information is used to carry out the tracking task in both local filtering algorithms.associatedAMSEsof both local and fusion estimator are clearly outlined in Table II after 1000 Monte Carlo trials.Looking at Table II, we draw conclusions: 1) the performance of the fusion estimator always outperforms that of local estimators under all occurrence probabilities [α¯1,α¯2]; and 2)the local estimator corresponding to the sensor with a larger(smaller) occurrence probability (of the scheduling behavior)has higher (lower) tracking accuracy.
V. CONCLUSION
In this paper, we have addressed the variance-constrained filtering fusion problem for a nonlinear CPS under the DoS attacks and the SCP. A set of local nonlinear filters have been adopted under variance constraints, and restrict upper bounds on both local and fused error covariances that have been guaranteed, where filter gains and weight matrices have been parameterized by minimizing such upper bounds. By resorting to the federated fusion criterion, all local estimates have been incorporated to obtain a fusion estimate. Further evaluation has been given by analyzing boundedness of gained upper bounds. Finally, the applicability of the proposed nonlinear fusion estimator has been validated by a simulation experiment. Some future research directions include 1) solving the variance-constrained filtering fusion problem for nonlinear cyber-physical systems under other communication protocols,e.g., the Round-Robin protocol and the try-once-discard protocol; and 2) solving the variance-constrained filtering fusion problem for nonlinear cyber-physical systems with other communication protocols, e.g., the Round-Robin protocol and the try-once-discard protocol.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Exponential Continuous Non-Parametric Neural Identifier With Predefined Convergence Velocity
- Exploring Image Generation for UAV Change Detection
- Wearable Robots for Human Underwater Movement Ability Enhancement: A Survey
- A Scalable Adaptive Approach to Multi-Vehicle Formation Control with Obstacle Avoidance
- Fuzzy Set-Membership Filtering for Discrete-Time Nonlinear Systems
- Distributed Fault-Tolerant Consensus Tracking of Multi-Agent Systems Under Cyber-Attacks