基于QPSO算法的智能网联汽车路径跟踪控制研究
2022-06-24曹青松
曹青松,易 星,许 力
(1. 江西科技学院 人工智能学院,江西 南昌 330098; 2. 江西科技学院 协同创新中心,江西 南昌 330098)
0 引 言
智能网联汽车搭载先进的传感、计算和执行设备,融合现代通信和网络技术,实现人、车、路等信息的共享交互,是车联网和智能车的有机联合,已经引起了世界各国的广泛关注。当前,路径跟踪、车道保持、车辆换道等问题成为了智能网联汽车领域的研究热点,而路径跟踪方面的研究更是受到广泛关注,其主要通过合适的控制算法,减少车辆在路径跟踪行驶时与目标路径的距离和方向偏差,从而达到提高路径跟踪精度的目的[1-2]。
近年来,相关学者围绕智能网联汽车路径跟踪问题开展了不少研究工作。F.YAKUB等[3]采用前向反馈和模型预测控制法设计控制器,以横向偏差最小为控制目标,研究四轮转向车辆的路径跟踪问题;J.SHIN等[4]通过矢量场法确定目标路径的方位,积分误差反馈法实现路径跟踪,设计一种渐近稳定的路径跟踪控制器;陈特等[5-6]基于分层控制理论研究无人车辆的路径跟踪问题,通过滑模控制设计上层控制器,利用四轮轮胎力优化分配法设计下层控制器;蔡英凤等[7]根据智能汽车在高速和低速转向时出现的系统特性差异,设计一种基于PID控制和模型预测控制的路径跟踪混合控制策略;王艺等[8]利用模型预测控制原理,设计一种可变参数的智能网联汽车路径跟踪控制方法,提高了车辆高速行驶时的转向精度和稳定性;张飞铁等[9]根据车辆与车道之间的运动学关系确定预瞄横向误差,采用前馈加反馈的方式设计一种改进的路径跟踪算法;汪伟等[10]建立汽车三自由度模型,根据侧向偏差和偏差变化率,采用模糊控制设计路径跟踪控制器;罗鹰等[11]采用RBF神经网络与滑膜控制相结合的方法,设计基于神经滑膜的路径跟踪控制器;李海青等[12]综合考虑路径跟踪误差、方向盘转角等评价指标,建立八自由度驾驶员—汽车预瞄跟随闭环模型,仿真验证了高速避障路径跟踪条件下控制器的有效性。
依据上述相关研究背景,笔者考虑智能网联汽车路径跟踪行驶时的跟踪精度和横向稳定性,采用最优控制算法设计路径跟踪控制器,通过QPSO算法对横摆角速度表达式中的参数进行优化,仿真研究参数优化后的路径跟踪控制器的控制效果,以及不同路径跟踪行驶工况下控制器的鲁棒性。
1 汽车路径跟踪数学建模
1.1 两自由度汽车操纵模型
为了便于研究,假设车辆行驶的路面平坦,车辆为刚性结构,忽略转向与悬架系统、轮胎载荷变化、空气动力的影响,建立两自由度汽车操纵模型,如图1。

图1 两自由度汽车操纵模型Fig. 1 The 2-DOF vehicle handling model
图1中,O为车辆质心位置;o′为车辆转向中心;Fy1、Fy2分别为地面对前轮、后轮的侧向反作用力;α1、α2分别为前轮、后轮的侧偏角;u1、u2分别为车辆前轴、后轴中点的速度;uc、v分别为车辆质心的纵向速度、横向速度;r为横摆角速度;β为质心侧偏角;δf为前轮转角;a、b为车辆质心到前、后轴的距离。
根据两自由度汽车操纵模型,采用牛顿第二定律推导得到两自由度汽车运动方程为:
(1)
Fy1、Fy2的表达式为:
(2)
α1、α2的表达式为:
(3)
将式(2)和式(3)代入式(1)中,进一步得到系统运动方程为:
(4)
式中:m为汽车质量;Cα1、Cα2为前、后轮胎的侧偏刚度;I为横摆转动惯量。
设置状态变量为x=[vr]T,系统输入为u=δf,将汽车两自由度运动方程(4)转化成标准的状态空间方程,形式为:

(5)

1.2 路径跟踪位姿误差模型
通常情况下,通过汽车的纵向运动及绕质心的转动来描述其路径跟踪工况,图2为汽车路径跟踪误差模型。
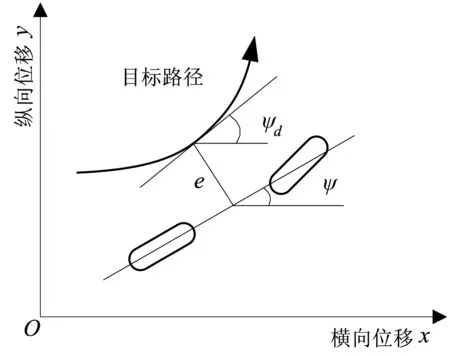
图2 汽车路径跟踪误差模型Fig. 2 Path following error model of vehicle
结合图2,汽车路径跟踪误差模型可通过方程式(6)描述:
(6)
式中:ψ、ψd分别为车身纵轴线、道路中心线切线与x轴的夹角,ψr=ψ-ψd;ρ为目标路径的曲率;e为汽车质心到道路中心线的垂直距离。
2 汽车路径跟踪控制器设计
为使得汽车在保持路径跟踪精度的同时,具有好的横向稳定性,根据汽车跟踪误差方程,要求ψr和e的目标值趋于0,同时保证期望质心侧偏角为0,且横摆角速度控制在理想范围内。以下通过反推法推导期望横摆角速度[13]。
根据式(6),设计Lyapunov方程如式(7)、式(8):
(7)
(8)
式(7)和式(8)中,设z1=sinhke,调节参数k>0,定义虚拟控制量ε1,令ε1=-c1z1;设z2=ψr-ε1,定义另一虚拟控制量ε2,令ε2=-c2z2coshke,c1、c2为常量。
(9)
(10)
由式(9)~式(10)可知,当β趋近于0时,z1、z2趋于0,ε1、ε2趋于0,因此,e和ψr也趋于0,进而得到汽车期望横摆角速度为:
(11)
当β趋近于0,且汽车横摆角速度满足式(11)时,可以同时满足汽车的路径跟踪精度和横向稳定性。
再采用最优控制算法设计路径跟踪控制器,令期望输出量为yt,yt=[0rd]T,则误差向量e(t)表示为:
e(t)=y-yt
(12)
二次型最优控制性能指标最小的表达式为:
(13)
根据式(5),可得最优控制器为:
u(t)=-R-1BT[Px(t)-g]
(14)
式中:g=[PBR-1BT-AT]-1CTQy;P为黎卡提代数方程的正定解。
3 期望横摆角速度rd参数优化
3.1 QPSO算法
参数c1、c2和k的取值对期望横摆角速度rd影响很大,进而影响控制器对车辆路径跟踪行驶时的跟踪精度和横向稳定性。文中采用QPSO算法对参数进行优化。该算法是在粒子群算法的基础上提出的,粒子不受最大速度的限制,可以实现整个解空间的搜索,有效克服了粒子群算法容易陷入局部最优的缺陷。
QPSO算法中,把需要优化的参数视为多维空间粒子,根据随机函数组合成的进化规则进行迭代,产生个体最佳粒子Pi,j(t)、群体最佳粒子Gj(t)、群体平均最佳粒子Cj(t),QPSO算法的进化规则为:
Xi,j(t+1)=si,j(t)±α·|Cj(t)-Xi,j(t)|·
ln[1/ui,j(t)]
(15)
其中:
si,j(t)=φi,j(t)·Pi,j(t)+[1-φi,j(t)]·Gj(t)
(16)
(17)
式中:t为第t次迭代;Xi,j为第i个粒子第j维;α为收缩-扩张系数;ui,j(t)、φi,j(t)为第t次迭代时第i个粒子的第j维的概率函数;M为粒子的个数。
3.2 期望横摆角速度控制器参数优化过程
根据3.1节中QPSO算法相关理论,设置期望横摆角速度rd中的参数c1、c2和k的优化流程,如图3。
1)参数初始化。根据反推法假设的条件,定义参数c1、c2和k的搜索范围分别为(0, 1]、(0, 10]、(0, 2];设置每次迭代粒子数为50,最大迭代次数为500,粒子维数为3。
2)求解迭代过程中的横摆角速度r(t),并计算r(t)与理想横摆角速度的差值,存储误差值。
3)判断是否完成设定的迭代次数,如果否,继续步骤2),如果是,输出误差最小的粒子,即得到优化后的参数c′1、c′2和k′。
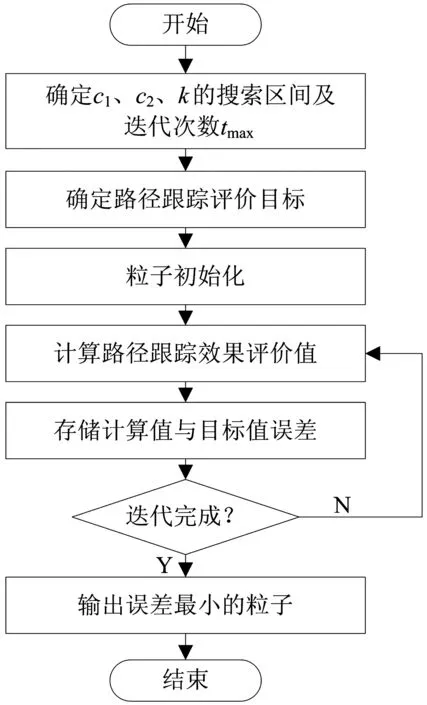
图3 期望横摆角速度rd参数优化流程Fig. 3 Optimization process of desired yaw rate rd
4 仿真研究
4.1 车辆基本参数
采用MATLAB软件进行仿真研究,表1为车辆基本参数信息。
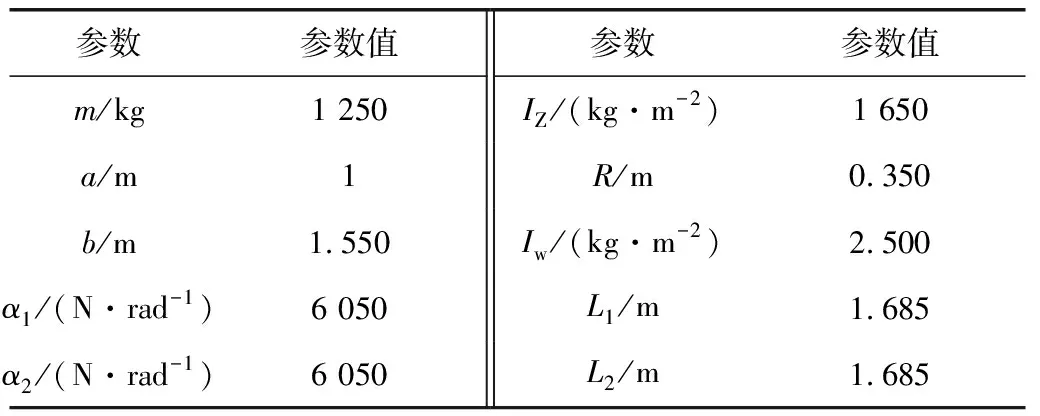
表1 车辆基本参数信息Table 1 Vehicle basic parameter information
4.2 仿真结果分析
以表1中车辆基本参数为例,根据设计的路径跟踪控制器以及参数优化方法,仿真研究参数优化后控制器的控制效果,以及车辆换道或弯曲道路行驶工况下控制器的鲁棒性。
4.2.1 参数优化后的控制器效果分析
考虑智能网联汽车在路径跟踪过程中的换道和弯曲道路行驶工况,验证参数优化后控制器的控制效果,如图4。
由图4可知,车辆在换道或弯曲道路下进行路径跟踪行驶时,目标路径的曲率ρ呈非线性变化,文中通过正弦函数近似描述ρ,结合实际路况,定义路径曲率的频率变化范围为[0,1]。

图4 车辆路径跟踪工况示意Fig. 4 Schematic diagram of vehicle path following condition
采用QPSO算法对期望横摆角速度关系式中的参数进行优化,优化结果如表2。

表2 参数优化结果Table 2 Parameter optimization results
与不考虑控制器参数优化的情况对比,分析参数优化后的控制器对智能网联汽车质心侧偏角β和横摆角速度r的影响。
图5为目标路径曲率为正弦变化时,车辆行驶时质心侧偏角随时间的变化曲线,其中,实曲线、点画线分别表示考虑和不考虑期望横摆角速度表达式参数优化的情况。
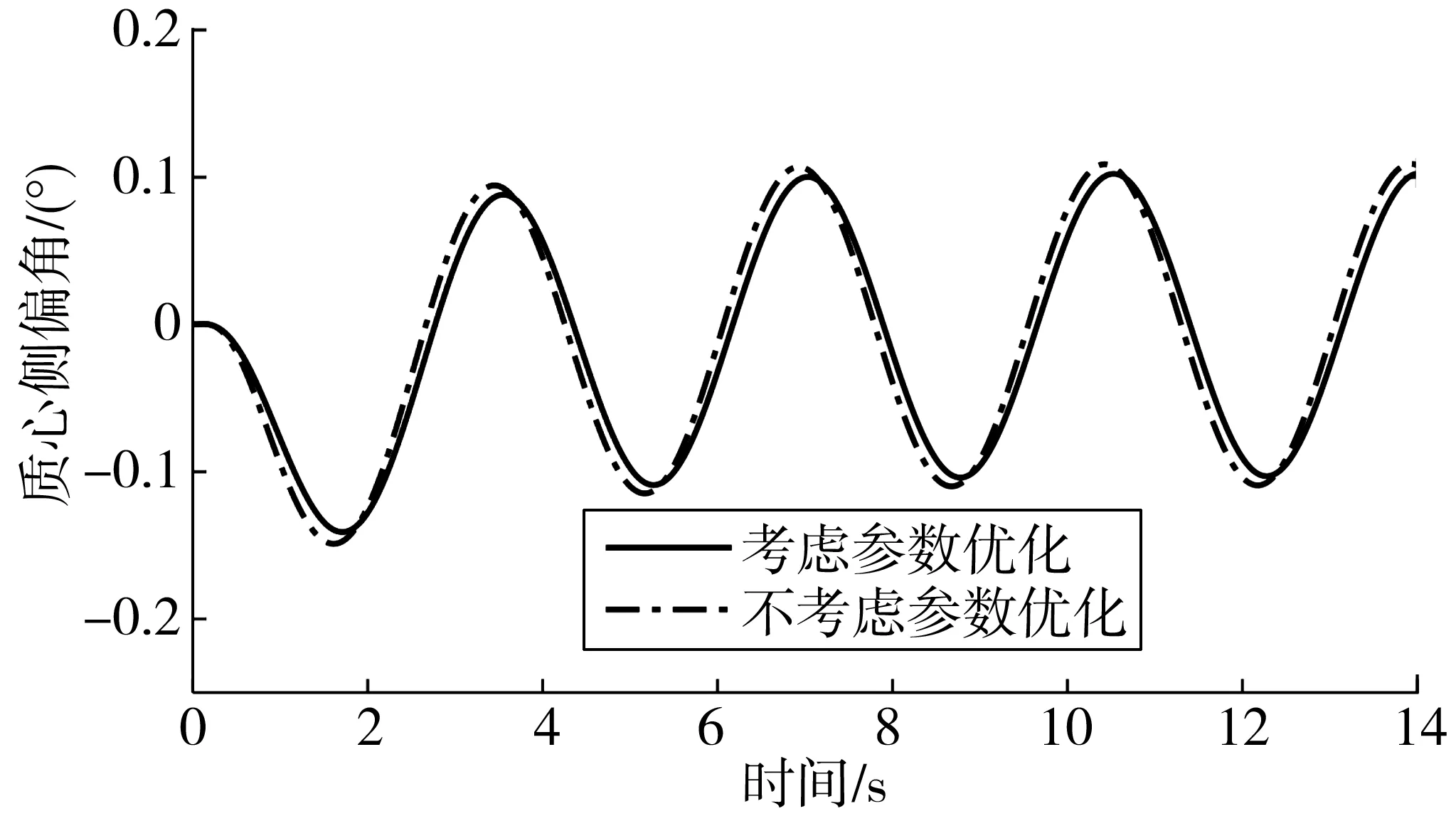
图5 质心侧偏角变化曲线Fig. 5 The change curves of centroid sideslip angle
由图5可知,车辆质心侧偏角的变化曲线与目标路径曲率变化相似,但方向相反,符合车辆横向运动规律;对比两条曲线发现,车辆质心侧偏角在-0.2°~0.2°之间变化,而考虑期望横摆角速度参数优化的条件下,质心侧偏角的变化范围略小一点,且在目标路径曲率变化大的波峰和波谷位置更为明显。由此表明,参数优化后,控制器对车辆的质心侧偏角控制的更好,车辆的横向稳定性更优。
图6为目标路径曲率为正弦变化时,车辆行驶时横摆角速度随时间的变化曲线,其中,实曲线、点画线分别表示考虑和不考虑期望横摆角速度表达式参数优化的情况。

图6 横摆角速度变化曲线Fig. 6 The change curves of yaw rate
由图6可知,车辆横摆角速度的变化曲线与目标路径曲率变化相似,方向也一致,符合车辆横向运动规律;对比两条曲线发现,横摆角速度在-0.2~0.2 rad/s之间变化,而考虑期望横摆角速度参数优化的条件下,实际的横摆角速度变化略小,尤其在目标路径曲率变化大的波峰和波谷位置更明显。由此也表明,参数优化后,控制器对车辆横摆角速度的控制也得到了改善。
综上分析,通过QPSO算法对期望横摆角速度表达式中参数进行优化后,能够较明显的减小车辆的质心侧偏角和横摆角速度,在保证车辆路径跟踪精度的同时,进一步提高了车辆行驶时的横向稳定性。
4.2.2 参数优化后的控制器鲁棒性分析
考虑不同车速和不同目标路径曲率的频率下,分析横摆角速度的变化规律,研究参数优化后的智能网联汽车路径跟踪控制器的鲁棒性。如图7,图7表示车速在20、40、60 km/h下的车辆横摆角速度变化曲线。此外,图7(a)中L1~L3、图7(b)中L4~L6、图7(c)中L7~L9均表示目标路径曲率变化频率为0.5、0.33、0.25 Hz下的横摆角速度变化曲线。
由图7可知,随着车速的增大,车辆横摆角速度幅值变化随之增大,但增大的速率是减缓的,表明参数优化后的控制器能够较好的克服因速度增大带来的控制难度。再以图7(a)为例分析,随着目标路径曲率的频率减小,曲线L1~L3的振动幅值随之减小,表明目标曲率的频率越小,车辆横摆角速度的振动幅值越小,控制器鲁棒特性越好。同理,研究相同情况下质心侧偏角的变化曲线亦得到类似的结果。

图7 不同车速下横摆角速度变化曲线Fig. 7 The change curves of yaw rate under different speeds
由此可知,当考虑车速和目标路径曲率的频率不同时,参数优化后的控制器仍然能够较好的控制车辆的横摆角速度和质心侧偏角,表明了控制器对不同路径跟踪行驶工况的适应性较强,此外,针对目标路径曲率的幅值不同也进行了仿真分析,结果相似,文中不再赘述。
5 结 论
1)建立两自由度汽车操纵动力学模型和路径跟踪位姿误差模型,考虑智能网联汽车的路径跟踪精度和横向稳定性,运用反推法确定期望横摆角速度表达式,再采用最优控制算法设计车辆路径跟踪控制器,最后通过QPSO算法对期望横摆角速度表达式参数进行优化。
2)得到经QPSO算法优化后的期望横摆角速度表达式中的参数值,以车辆换道和弯曲道路行驶为例,验证了参数优化后的控制器能有效减小质心侧偏角和横摆角速度的变化,改善了路径跟踪效果,再通过改变车速和目标路径曲率变化频率,进一步验证了控制器较好的路径跟踪精度和横向稳定性。
3)研究基于QPSO算法的智能车辆路径跟踪优化问题,可以提高智能车辆在路径跟踪行驶时的跟踪精度和横向稳定性,为智能网联汽车在横向控制关键技术方面的研发提供一定借鉴与参考。