末端交会角约束下的滑膜变结构制导律设计
2022-06-23徐乐凤许彩云
徐乐凤,许彩云
(1.泰山科学技术研究院,山东 泰安 71000;2.周口师范学院 机械与电气工程学院,河南 周口 466000)
导弹制导系统是一个复杂的系统,存在多变量、非线性、时变以及各种不确定性如模型不确定、外界干扰等因素,同时,随着技术的进步,导弹的工作环境越来越复杂,目标机动性变强,因此对导引律的设计提出了更高的要求。滑模变结构控制是一种能够有效地处理不确定非线性系统的鲁棒控制方法[1],在导引律的设计方面体现了巨大的优越性,针对系统存在结构不确定性、外界干扰等因素的问题,能够获得较为满意的动态性能。在设计导引律的过程时,一些特定的条件下,不仅要满足脱靶量要求,还需要满足交会角约束,如希望能够垂直命中具有军事价值的目标,希望采用大角度俯冲攻击超声速导弹等。因此,研究这种带交会角约束的制导律,具有重要的意义。
1 末端拦截问题的数学描述


图1 纵向平面内弹目相对运动关系
令qεf为导弹即将命中目标时期望的视线倾角,则有
vtysin(θt-qεf)-vmysin(θm-qεf)=0
(1)
式中,vty、vmy分别表示在纵向平面中目标与导弹的速度,经推导得
(2)

同理,在侧向平面内,令qβf为导弹即将命中目标时期望的视线偏角,可以得到
(3)
分析可知,只要给定期望的末端交会角与目标弹道倾角(弹道偏角),就可以转换为相应的视线倾角(视线偏角)约束。
综上所述,导弹和目标的相对运动,经推导可得下列状态方程组:
(4)
2 滑膜变结构制导律设计
2.1 纵向平面内制导律设计

(5)
我们在推导控制器时可以应用趋近律。系统状态方程(4)是一个线性时变系统,应用一般的指数趋近律、等速趋近律等并不可行[4],为了使系统状态不但能够到达滑模面,而且还要在到达滑模面的过程中保证系统有良好的动态性,我们考虑具有自适应性的滑模趋近律[5]。
自适应趋近律的一般表达式为
(6)
式中,p(t)代表系统的参数。
针对系统状态方程(4),上式设计的自适应趋近律为
(7)
式中,k3、ε1均为大于零的常数。
对式(5)求微分,得
(8)
将式(8)代入(7),得
(9)

(10)
将式(4)、(5)代入(10)整理得
(11)
(12)

2.2 侧向平面内制导律设计
根据双平面的对称关系,同理,可以得到侧向平面内的制导律。
取滑动模态为
(13)
其中,k4=const>0,k5=const>0。
选取自适应趋近律为
(14)
其中,k6=const>0,ε2=const>0。
同理,可得到侧向平面内制导律为
(15)
式(11)、(15)中含有开关函数项,需要对控制量进行切换。然而在实际的系统中,控制量的切换不是瞬间完成的,总是存在一定的时间延迟,这样必然会造成抖动,抖动的幅度过大就有可能产生一定的危害。为了避免这种现象发生,我们需要对非连续的开关函数进行光滑处理[9],可以用高增益连续函数
s1(t)/[|s1(t)|+δ]
和
s2(t)/[|s2(t)|+δ1]
分别来代替sgns1(t)和sgns2(t),其中δ和δ1都是很小正数。经过光滑处理的SASMG为
(16)
3 仿真验证
导弹制导系统的仿真模型如图2所示,在导弹制导系统仿真中,首先给出导弹与目标的初始状态,包括初始位置与初始速度,导弹-目标的相对运动模块根据导弹与目标的运动信息计算出所需要的导引信息,由导引模块得到导引指令后送给自动驾驶仪,控制导弹改变其运动轨迹,最终准确拦截并命中目标。
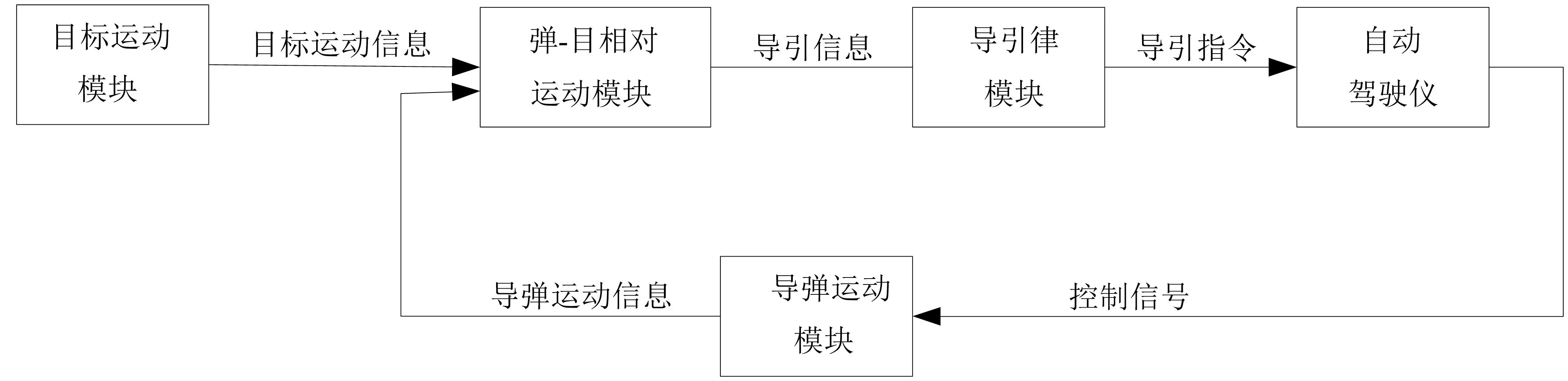
图2 导弹制导系统仿真模型图
假设末制导初始条件:令参数k1=2,k2=1,k3=1;k4=2,k5=1,k6=1。导弹速度Vm=800 m/s,目标速度Vt=300 m/s,弹目初始相对距离R(0)=4 000 m,弹目初始视线倾角qε=15ο,弹目初始视线偏角qβ=30ο,消颤因子δ=0.02,ε=200,期望的视线偏角与视线倾角皆设为零[10]。仿真结果即为情况1,如图3-5所示。图3是三维空间的弹目相对运动关系曲线,可以看到,导弹不但能够击中目标,而且制导末端满足末端交会角为零;图4是纵向平面内的弹目相对距离变化曲线,可以看到,弹目相对距离大约在9.24 s变为零;图5是弹目相对倾角和相对偏角变化曲线,可知,弹目相对倾角和相对偏角在9.24 s变为零;综上所述,所设计的制导律满足性能指标要求。

图3 导弹-目标相对运动曲线

图4 弹目相对距离变化曲线

图5 弹目相对倾角和相对偏角变化曲线
4 结语
针对希望以期望的交会角命中目标的制导律进行设计,首先推导出了带末端交会角约束下的弹目相对运动的状态方程,针对该状态方程分别在纵向平面和侧向平面设计自适应趋近律,同时根据Lyapunov第二法证明了加入该趋近律之后系统的稳定性,能够满足期望的末端交会角和零脱靶量的要求,最后进行仿真验证,结果表明能够满足所要求的性能指标。本文仅从理论上证明了可行性,但它在实际制导中的应用有待进一步研究。
