单自由度磁悬浮系统无模型自适应控制的研究
2022-06-22钟志贤蔡忠侯祁雁英
钟志贤 ,蔡忠侯 ,祁雁英
(桂林理工大学机械与控制工程学院,广西 桂林 541006)
磁悬浮技术已广泛应用于航空航天、医疗设备、能量回收、透平机械等领域[1-4].对于单自由度磁悬浮系统而言,其控制精度的高低将直接影响系统的稳定性[5],因此如何提高控制精度一直是磁悬浮技术研究的重点.
目前,针对磁悬浮技术的控制问题,已有许多学者进行研究,并取得了丰富的成果[6-9].吕治国等[10]通过状态反馈法建立精确线性化磁悬浮小球的数学模型,并采用极点配置法与在线参数辨识相结合的方法实现了单自由度磁悬浮系统的自适应控制.朱坚民等[11]通过在线训练神经网络辨识器,建立单自由度磁悬浮系统误差与控制量的动态模型,在PID控制器基础上进一步进行反馈补偿,该控制方法与PID控制器相比,其控制精度有了很明显的增加.张井岗等[12]将分数阶PDμ(对PD控制中的微分项进行μ阶求导)作为滑模面函数进行滑模控制,有效解决了单自由度磁悬浮系统在传统滑模控制中的抖振现象.宋荣荣等[13]通过模糊PID原理构造单自由度磁悬浮系统的数学模型,制定相关模糊控制规则,并设计出一种可以在线调整PID参数的控制器,减小了系统的跟踪误差.为避免高速磁悬浮控制过程由于重力使转子发生小角度的公转,夏长峰等[14]提出一种PID与滤波交叉反馈的方式,通过DSP (digital signal processor)和 FPGA (field programmable gate array)搭建数字控制系统,实验结果表明,这种方法可以很好地避免转子发生小角度的进动.
以上控制算法都是通过建立精确的模型来实现单自由度磁悬浮系统的控制,模型越精确,控制效果越好.然而,由于单自由度磁悬浮系统漏磁、磁路程耦合等因素的存在,精确的磁悬浮模型通常难以获得.因此,针对被控对象数字模型难以建立的问题,有学者提出了数据驱动控制的方法,如迭代反馈控制[15]、迭代学习控制[16]、虚拟参考反馈控制[17-18]和无模型自适应控制(model-free adaptive contorl, MFAC)[19-20]等.在众多的数据驱动方法中,较为典型的是PID和MFAC.但PID自适应差、鲁棒性不强,所以不适合用于具有强非线性的系统中.与PID相比,MFAC不仅鲁棒性强、自适应性好、概念简单易懂而且算法的稳定性与收敛性均具有严格的数学证明[21-25],因此,在许多实际系统中得到了广泛的应用,如地面车辆[26]、气压制冷系统[27]、广域电力系统[28]等,但 MFAC在磁悬浮领域的应用较少,文献[29]提出了一种单自由度磁悬浮系统的无模型自适应控制方法,仿真分析了MFAC与PID两种控制方法对磁悬浮球的控制效果,结果表明该方法对单自由度磁悬浮系统的控制是有效的.
本文将基于全格式动态线性化的无模型自适应控制方法[29]应用于单自由度磁悬浮系统,设计单自由度磁悬浮系统无模型自适应控制器,仿真分析了MFAC控制参数对单自由度磁悬浮系统控制效果的影响及对阶跃响应信号、干扰信号和噪声信号的响应特性,最后在磁悬浮球实验台上进行实验验证.仿真及实验结果表明:全格式无模型自适应控制方法能够最大限度地摆脱单自由度磁悬浮系统对精确模型的依赖,优化系统动态性能,且基于跟踪的全格式无模型自适应控制器在稳定时间及系统的动态性能等方面明显优于PID控制器.
1 单自由度磁悬浮系统
多自由度磁悬浮系统在满足一定假设条件下,可以等效为多个独立的单自由度系统.因此,以单自由度磁悬浮系统作为被控对象,分析MFAC对单自由度磁悬浮系统的控制效果具有很好的指导作用.
单自由度磁悬浮系统如图1所示,主要由电磁铁、铁球、激光位移传感器、驱动电路和控制器组成,图中:m为铁球的质量;g为重力加速度;F为电磁力;xT为铁球的位移.当电磁铁产生的电磁力与铁球的重力相等时,铁球即实现悬浮.
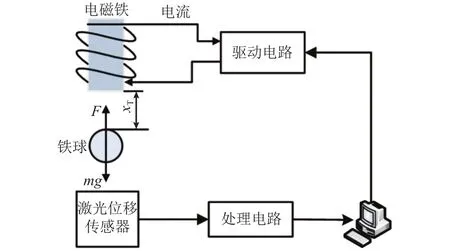
图1 单自由度磁悬浮系统示意Fig.1 Schematic diagram of single degree-of-freedom magnetically levitated system
1.1 单自由度磁悬浮系统数学模型
为简化计算,对单自由度磁悬浮系统做出如下假设[29]:
假设1每匝线圈中通过的磁通量相同.
假设2功率放大器不存在时间滞后.
则由图1可以推导出单自由度磁悬浮系统的动力学方程为

式中:x为铁球质心到电磁铁磁极表面的瞬时气隙;ic为电磁铁中瞬时电流;x0为铁球的平衡气隙;i0为电磁铁中的平衡电流;F(ic,x)为电磁吸力;μ0为空气磁导率;A为铁芯的导磁截面积;N为电磁铁线圈匝数;F(i0,x0)为平衡位置(i0,x0)处电磁铁对小球的电磁吸力.
将式(1)在平衡位置(i0,x0)处进行泰勒级数展开,可得

式中:K=-μ0AN2/4.
将式(2)代入式(1)可得单自由度磁悬浮系统的数学模型为

对式(3)进行拉普拉斯变化,并代入式(1)中,可得单自由度磁悬浮系统的开环传递函数为

式中:C= -1/Ka,Ka为功率放大器的增益;s为复数;A=i0/(2g);B=i0/x0.
单自由度磁悬浮系统实验台的物理参数如表1所示.
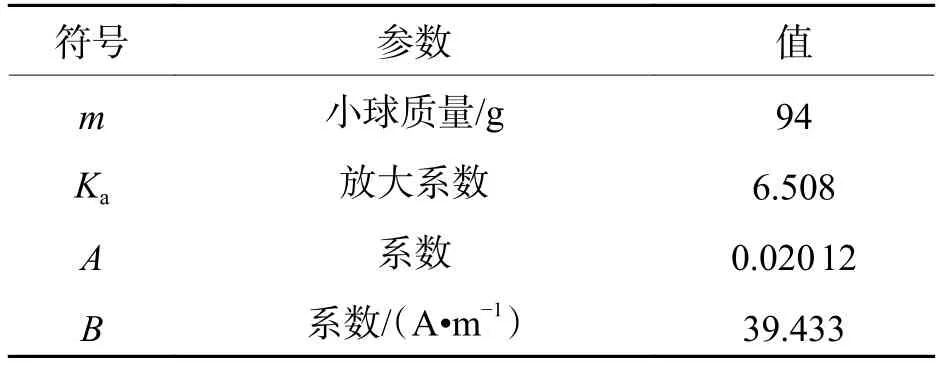
表1 单自由度磁悬浮系统的物理参数Tab.1 Physical parameters of a single-degree-of-freedom magnetically levitated system
将表1中的物理量值代入式(4),得到单自由度磁悬浮系统的开环传递函数为

为确保不失真的恢复模拟信号,根据香农采样定理,确定采样时间T=0.001 s,对式(5)进行离散化后可知单自由度磁悬浮系统的动态数学模型为

式中:k为采样时刻,k=1,2, ··· ,N,N为最大采样时刻;u(k) 和u(k-1)分别为时刻k和时刻k-1系统的输入值;y(k)、y(k-1)和y(k+ 1)分别为时刻k、时刻k-1和时刻k+ 1系统的输出值.
2 全格式无模型自适应控制器设计
2.1 单自由度磁悬浮系统的动态线性化
定义HLL(k)∈RLy,Lu为 在 区 间 [k-Lu+1,ky,u]内的所有控制输入信号以及在区间 [k-Ly+1,k]内所有输出信号组成的向量,即

当满足k≤0 时,HLy,Lu(k)=0Ly+Lu,其中Ly,Lu(0 ≤Ly≤ny,1≤Lu≤nu)称为系统的伪阶数,ny和nu为系统的阶数.
对于单自由度磁悬浮系统(6),满足如下假设:
假设1单自由度磁悬浮系统(6)输出可控可测.
假设2除有限的时刻点,f(·) 关于第(ny+2)个变量的偏导数是连续的[25].
假设3除有限的时刻点,单自由度磁悬浮系统(6)满足广义Lipschitz条件,即任意采样时刻k1≠k2,k1,k2≥ 0,和HLy,Lu(k1)≠HLy,Lu(k2) ,有

式中:y(kj+1)=f(y(kj),···,y(kj-ny),u(kj),···,u(kjnu)),j=1,2 ;b为大于 0 的常数.
因此,根据引理[25]可知,给定0≤Ly≤ny,1≤Lu≤nu,当HLy,Lu(k)-HLy,Lu(k-1)≠0 时,存在一个称为伪梯度的时变参数向量 Φf,LL(k)∈RLy,Luy,u,使得单自由度磁悬浮系统可转变为式(7)的动态化数据模.

式中:ΔHLy,Lu(k)=HLy,Lu(k)-HLy,Lu(k-1);Φf,Ly,Lu(k)=
Φj(k)为 Φf,Ly,Lu(k) 中第j项的数值,j=1, ··· ,Ly+Lu.式(7)是单自由度磁悬浮系统(6)的一种等价的动态线性化表示,是用于设计控制器的线性时变数据模型.
2.2 单自由度磁悬浮系统的MFAC控制算法
对式(7)采用式(8)所示的函数作为控制输入准则函数.

式中: λ >0 为控制算法的权重因子,用来控制输入量变化;y*(k+ 1)为期望的输出信号.
将式(7)代入式(8)中,对u(k) 求导,并令其等于0,可得到式(9)所示的控制算法.

式中:加入控制算法的步长因子 ρj∈ (0,1],是为了使控制算法更具有一般性; Δy(k-j+ 1)=y(k-j+1)-y(k-j);Δx(k-Ly-j+ 1)=x(k-Ly-j+ 1)-x(k-Ly-j).
2.3 伪梯度估计算法
由式(9)可知,若要完成该控制算法,须知道伪梯度(PG)的值,但是由于单自由度磁悬浮系统的数学模型未知,伪梯度是一个时变参数,很难确定其真实值.因此,采用如下PG估计准则函数对伪梯度进行估计:

式中:μ>0,为伪梯度估计算法的权重因子;(k)为 Φf,Ly,Lu(k) 的估计值,

根据最优条件,对式(10)关于 Φf,Ly,Lu(k) 求极值,可得到PG的估计算法为

式中:η∈(0,1],为伪梯度估计算法的步长因子,可以使该算法有更强的灵活性和一般性
2.4 单自由度磁悬浮系统的控制器设计
针对本文所应用的单自由度磁悬浮系统,最终选取Ly=2,Lu=1 ,为了使2.3中的伪梯度估计算法在单自由度磁悬浮系统中的位移跟踪能力更强,需要引入伪梯度重置算法:
通过以上估计算法和重置算法可知,全格式无模型自适应控制方案为

3 仿真分析
为验证上述分析的正确性,对FFDL-MFAC(model-free adaptive control method based on fullformat dynamic linearization)控制器进行仿真分析,并以PID控制器作为对照组进行对比.FFDL-MFAC控制器如图2所示,PID控制器如式(14).

图2 FFDL-MFAC控制器原理Fig.2 Principle of FFDL-MFAC controllerr

式中:e(k)为采样时刻k的误差;Kp、Ki、Kd分别为PID控制器中比例项、积分项、微分项的控制参数.
单自由度磁悬浮系统的参数如表1所示,两种算法的采样时间均为0.001 s.为比较两种算法的控制性能,参考文献[30],采用误差均方根作为算法控制效果的评价指标,如式(15).

在全格式无模型自适应控制方案中,步长因子和权重因子分别选取为ρ1=ρ2=0.6,ρ3=2.2,η=0.2,μ=0.1,λ=0.01,ε=0.1,伪梯度估计值的初始值设置为Φ^f,2,1(1)=[1000900-0.1+0.1i]T.在 PID控制方案中,通过参数整定[31]得到最优PID控制参数为:Kp=2 000,Ki=0.1,Kd=0.001.
3.1 FFDL- MFAC自适应仿真分析
在控制参数不变的情况下,仅改变参考位移,则FFDL-MFAC的仿真结果如图3所示.在不同的参考位移下,FFDL-MFAC控制器都可以跟踪期望信号较快地进入稳定状态.

图3 不同参考位移的仿真结果Fig.3 Simulation results at different reference positions
3.2 FFDL- MFAC控制参数对悬浮效果的影响
权重因子λ、步长因子ρ及伪梯度Φ的初始值是影响MFAC控制效果的主要参数.为探清权重因子λ、ρ及伪梯度Φ的初始值对控制的影响,分别对其进行仿真分析.
参数λ对悬浮效果的影响如图4所示,由图4可知:当λ在[0.008 5, 0.012 0]时,MFAC算法的响应速度基本不变,其稳定时间在0.18 s至0.20 s之间;当λ小于0.008 5或大于0.012 0时,MFAC算法的响应速度变快,但过快的响应速度会使得超调量增加.

图4 λ对悬浮效果的影响Fig.4 Impact of λ on the levitation effect
参数ρ对悬浮效果的影响如图5所示,MFAC算法的响应速度随ρ1取值的减小而增大,随ρ2、ρ3取值的增大而增大,但过快的响应速度会带来超调.

图5 ρ对悬浮效果的影响Fig.5 Impact of ρ on the levitation effect
伪梯度Φ的初始值对悬浮效果的影响如图6所示,由图6可知:Φ1的减小或Φ2的增大会增大MFAC算法的响应速度,Φ3数值的变化不会影响系统的响应速度,但过大的Φ3会使系统发生震荡;伪梯度Φ的取值范围很大,有利于系统稳定性调节.

图6 伪梯度对悬浮效果的影响Fig.6 Impact of imaginary part of Φ on suspension effect
3.3 FFDL-MFAC与PID算法的控制效果对比
1) 阶跃信号的响应对比
FFDL-MFAC与PID控制器对阶跃信号的响应如图7、表2所示.可以看出:FFDL-MFAC对于阶跃信号的响应优于PID

表2 阶跃信号响应下MFAC与PID控制器的性能对比Tab.2 Performances comparison between MFAC and PID controller under step signal response

图7 MFAC与PID算法对阶跃信号的响应Fig.7 Response of MFAC and PID algorithm to step signal
2) 干扰信号的响应对比
在单自由度磁悬浮系统中加入干扰信号d,

则MFAC和PID控制器对干扰信号的响应如图8、表3所示.对于干扰的抑制,MFAC的算法优于PID,超调量小,稳定快速.
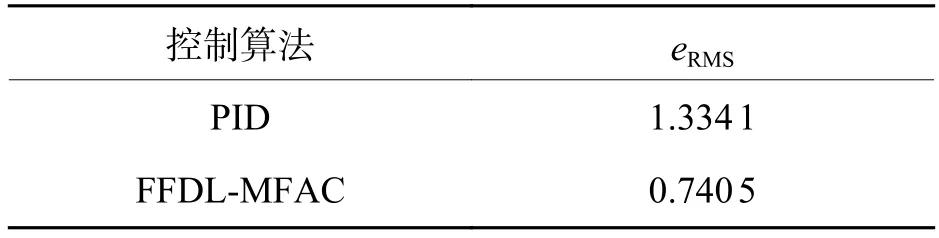
表3 干扰信号下MFAC与PID控制器的性能对比Tab.3 Performance comparison between MFAC and PID controller under interfering signal response
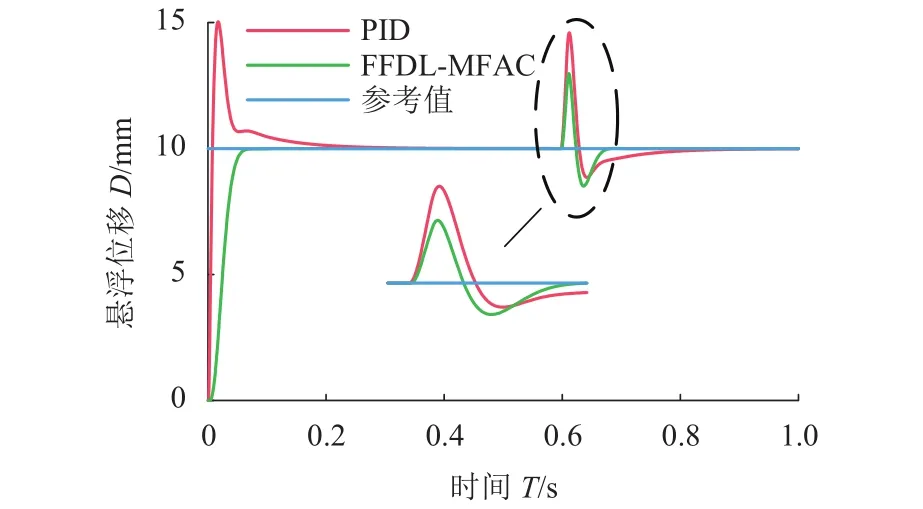
图8 MFAC与PID算法对干扰信号的响应Fig.8 Response of MFAC and PID algorithm to interfering signal
3) 噪声信号响应对比
在单自由度磁悬浮系统中加入干扰信号d及噪声信号[-0.04, 0.04],则 FFDL-MFAC和PID控制器仿真结果如图9.FFDL-MFAC与PID控制器的RMS分别为0.842 2和1.388.在含有噪声的情况下,FFDL-MFAC仍然对于干扰有很好的抑制作用.

图9 MFAC与PID算法对白噪声的响应Fig.9 Response of MFAC and PID algorithms to white noise signal
4 实验分析
为验证FFDL-MFAC控制器对单自由度磁悬浮系统的控制效果,在单自由度磁悬浮实验平台上进行悬浮实验.单自由度磁悬浮实验平台如图10所示,包含电磁铁、铁球、位移传感器、功率放大器及研华的控制板卡,其中由于板卡已经安装到计算机中,所以在图中并未标示出来.自由度磁悬浮实验平台的参数见表1,其测量坐标如图11所示,以电磁铁吸附平面的中心为原点建立ZOX测量坐标系.由几何关系可知,悬浮位移x1=x2-x3.

图10 单自由度磁悬浮系统实验台Fig.10 Magnetic levitation ball experimental platform
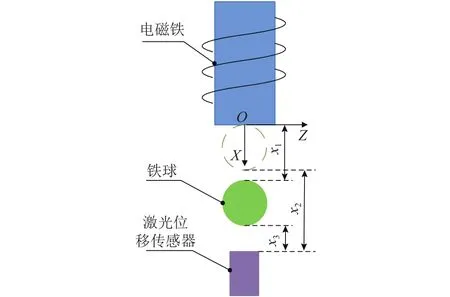
图11 铁球悬浮位移与传感器测量位移的关系Fig.11 Relationship between the suspension displacement of the iron ball and the displacement measured by the sensor
悬浮实验中,同样采用FFDL-MFAC和PID算法进行对比悬浮实验,以误差均方根作为悬浮性能的评价指标.FFDL-MFAC与PID的实时控制程序分别如图12所示,通过PCI-1711输入模块与PCI-1711输出模块实现信号的输入与输出.

图12 控制程序Fig.12 Control program
对于FFDL-MFAC控制器,其控制参数取Ly=1,Lu=2,μ=0.1,η=0.2,ρ=[0.6 0.6 1],λ=0.001,Φ(1)=[214 000 21 000 600].PID控制器的最佳控制参数为Kp=100,Ki=0.000 1,Kd=12.两种算法的位置跟踪效果和悬浮效果如图13、14所示.
从图13、14可知:FFDL-MFAC算法具有很强的自适应性,在悬浮过程中,铁球的悬浮参考位置从6 mm变成8 mm和10 mm时,FFDL-MFAC能立即响应并快速实现铁球的稳定悬浮;而作为对比组的PID控制算法不具有自适应性,所以当悬浮参考位置发生变化时,铁球发生坠落.

图13 位移跟随测试Fig.13 Displacement following test
从图14可知:FFDL-MFAC算法的悬浮精度优于PID,FFDL-MFAC算法的误差均方根为0.154 2,而PID算法的误差均方根为0.414 9.

图14 算法悬浮性能对比Fig.14 Comparison of algorithm levitation performance
5 结 论
本文针对单自由度磁悬浮系统的非线性及精确数学模型难以建立的问题,通过引入FFDL-MFAC算法设计出适合单自由度磁悬浮系统的控制器.仿真及实验结果表明,全格式无模型自适应控制方法只需采集单自由度磁悬浮系统在工作状态下的I/O数据,无需建立单自由度磁悬浮系统精确数学模型,通过设定全格式无模型自适应控制器参数即可实现高精度稳定悬浮控制,且控制器具有良好的自适应性和鲁棒性.与传统PID相比,FFDL-MFAC具有以下优点:
1) FFDL-MFAC算法的控制精度高.在悬浮过程中FFDL-MFAC算法的误差均方根为0.154 2,而PID算法的误差均方根为0.414 9.
2) FFDL-MFAC控制参数的调整域较大,有利于系统稳定性的调节.