磁悬浮列车发展现状与展望
2022-06-22邓自刚刘宗鑫李海涛张卫华
邓自刚 ,刘宗鑫 ,李海涛 ,张卫华
(1.西南交通大学牵引动力国家重点实验室,四川 成都 610031;2.西南交通大学超高速真空管道磁浮交通研究中心,四川 成都 610031;3.西南交通大学力学与航空航天学院,四川 成都 610031)
轨道交通的发展一直以在安全舒适条件下实现高速运行为目标.常规轮轨铁路中,支撑力、牵引力和制动力都需通过轮轨接触实现,因此轮轨黏着极限限制了其速度.而磁悬浮列车采用电磁力代替接触力实现支撑、牵引和制动,突破了黏着极限的限制,更适用于高速运行.2019年9月,中共中央、国务院印发《交通强国建设纲要》明确指出“发展时速600公里级高速磁悬浮系统”.另一方面,磁悬浮技术已应用于风力发电机[1]、航天发射[2]、离心机[3]、电梯[4]、心脏泵[5]和磁悬浮轴承[6]等各个领域,积累了大量技术经验,可供磁悬浮交通参考.
从社会经济的发展历史来看,轨道交通运输速度总是伴随着工业革命而实现飞跃.第一次工业革命以19世纪上半叶蒸汽机的使用为标志.当时,铁路运输系统强大的运输能力以及“卓越的”运输速度(约80 km/h)极大地促进了社会的发展.第二次工业革命发生在20世纪上半叶,伴随着电力、化学品和石油的应用,轨道交通的速度接近200 km/h.随着科技的不断创新与进步以及第三次工业革命的开始,使得轮轨高铁的速度超过了300 km/h.伴随着电子技术、信息和通信技术的引入,轨道交通系统拥有更好的便捷性与舒适性.同时,磁浮交通系统的速度超过了400 km/h.
由于数字网络、先进的信息/通信技术、人工智能以及新材料和可再生能源的使用,新工业时代已经到来,必然会促进轨道交通发展,使运营速度进一步提升.
什么样的轨道交通模式可以延续这一进步,正是当下探讨的热点.就目前的技术而言,磁浮技术有潜力匹配新工业革命对速度的需求.从速度趋势而言,新的发展需要研发接近飞机速度的地面运输系统.然而,与高空飞行的飞机不同,地面运输系统面临着更高的气压,限制了速度的提升.若进一步将磁悬浮技术与真空管道技术相结合,则有望实现与飞机飞行时相近甚至更低的气压环境,进而获得更高的运营速度.
磁浮交通系统与传统的轮轨列车系统相比,具有显著的优势[7]:
1) 列车与轨道之间没有接触,减少摩擦损耗,摆脱黏着限制,意味着更低的污染和碳排放,更少的维护成本[8];
2) 列车没有车轮,且齿轮、联轴器、车轴、轴承等机械传动结构与传统轮轨列车相比更少,所以质量较轻,增加了有效质量比;
3) 列车的重量均布在轨道上,降低对轨道和桥梁的强度要求;
4) 转弯曲线半径更小,爬坡能力更强,具有更好的地形适应性[8].
为了梳理磁浮技术的发展现状和前景,本文结构如下:回顾磁悬浮列车的发展历史;梳理磁悬浮技术的分类、相应的工作原理与应用经验;阐述磁悬浮列车应用技术难点;介绍真空管道运输(evacuated tube transportation,ETT)系统的潜力.
1 磁悬浮列车技术的发展历史
历史上第一个磁悬浮交通系统是由美国的Smith[9]于1907年提出.1912年,美国的Bachelet[10]获得了一项有关“悬浮传输装置”的专利.德国的Kemper[11]于1937年获得了第一项由直线电机驱动磁悬浮列车的专利.1959年,美国的Richard[12]申请了一项有关磁悬浮交通系统的专利.此后,世界范围内就此主题开展了广泛研究并申请了大量专利.图1展示了有关磁悬浮列车技术的十大专利国家[13].

图1 磁悬浮专利前十的国家Fig.1 Top ten countries with magnetic levitation patents
1.1 中国磁浮列车发展史
20世纪80年代初,中国开始进行磁悬浮交通系统研究:1989年,国防科技大学研制出中国第一台小型磁悬浮原理样车[14];1991年,我国自行研制的第一辆磁悬浮列车原样在国防科技大学试验成功[15];1994年,西南交通大学研制成功中国第一辆可载人常导低速磁悬浮车[16],自重4 t、悬浮高度为8 mm;2001年,北京控股磁悬浮技术发展有限公司联合国防科技大学等单位制造了中国第一辆全尺寸磁悬浮车[17];2000年,上海市与德方联合体(西门子、蒂森·克虏伯、磁浮国际公司)签订协议合作修建上海高速磁浮示范线[18-19],于2001年正式开工,并于2003年进行试运营,如图2所示,此试验线采用Transrapid 08(TR 08)磁悬浮系统,从浦东国际机场至龙阳路地铁站,全长33 km,最高运行速度达430 km/h;2006年,中国自行研制、设计、施工的首条中低速磁悬浮线路——青城山中低速磁悬浮列车工程试验线在都江堰市建成,全长420 m[20];2009年,中低速磁悬浮列车唐山试验线工程在中国北车唐山轨道客车有限公司竣工并通过验收[21];2012年,我国首列可投入商业运营的中低速磁浮列车“追风者”在中车株洲电力机车公司下线,我国由此成为世界第四个能够自主研制中低速磁浮列车的国家[22];2014年,西南交通大学牵引动力国家重点实验室联合常州西南交大轨道交通研究院、同济大学磁浮中心等单位,自主研制出速度可达140 km/h的磁悬浮列车[23];2016年,长沙火车南站至黄花机场的18.55 km“长沙磁浮快线”开通运行[24-25],如图3所示;2017年,采用国防科技大学磁浮交通核心技术建设的中低速磁浮交通示范线“S1”线正式商业运营[26-27],如图4所示,该试验线一期工程长10.165 km,设计行车速度为100 km/h;2018年,中车四方股份公司牵头,速度为600 km/h的高速磁浮交通系统技术方案通过专家评审,标志着国家重点研发专项“高速磁浮交通系统关键技术”课题取得阶段性成果[28];2020年,高速磁浮试验样车在上海同济大学磁浮试验线上成功试跑;2021年7月,采用五节编组的列车系统在青岛下线[29],如图5所示;2017年12月,新筑股份引进了德国Transport System Bögl (TSB)内嵌式中低速磁浮系统,在位于成都的生产基地兴建了全长4.5 km(一期工程为3.5 km)的模拟运营线[30],该试验线可真实模拟轨道交通的运营状态,完成内嵌式中低速磁浮的试验验证,2021年2月,该系统试验速度达到169 km/h.此外,我国还在进行超导钉扎磁浮和超导电动悬浮技术的研究:2021年1月,作者所在团队重点参与的高温超导高速磁浮工程化样车及试验线在西南交通大学启用;2021年11月,中国航天科工集团第三研究院进行了超高速磁悬浮电磁推进试验.中国磁悬浮列车技术申请了大量专利,专利占总体的27.11%,全球排名第一[13].

图2 上海高速磁浮示范线Fig.2 Shanghai high-speed maglev demonstration line

图3 长沙磁浮快线Fig.3 Changsha maglev express

图4 北京“S1”磁浮示范线Fig.4 Beijing “S1” maglev demonstration line

图5 青岛高速磁浮交通系统Fig.5 Qingdao high-speed maglev transportation system
1.2 日本磁浮发展史
日本于20世纪60年代初期开始磁浮车研究,经过60年的探索,已拥有了实用化的基础技术,其研究的磁浮列车形式主要为电磁悬浮和超导电动悬浮.日本航空公司(Japan airlines,JAL)最早采用德国Kruss-Maffei (KM)公司技术开展磁悬浮技术的研究[31].在KM公司专利技术基础上,开发了high speed surface transport (HSST)系列电磁悬浮列车.1975年,日本航空公司推出HSST-01型磁浮试验车辆,于1978年,在东扇岛试验线上达到307.8 km/h试验速度;同年,推出HSST-02型磁浮试验车辆,装备了二系悬挂;1985年,推出HSST-03型磁浮试验车辆,采用了独特的车体机械支承装置;1987年,推出HSST-04型磁浮试验车辆,并于次年在琦玉国际博览会展示;1989年,研制成功HSST-05型磁浮试验车辆,在横滨国际展览会上展示;HSST-100S是继HSST-05之后研制的、适用于低速运行的磁悬浮列车[32].并于1991年到1995年,在大江线对HSST-100S型磁浮列车进行了100多项面向应用的试验,在HSST-100S型磁浮列车的基础上,推出加长型样车——HSST-100L.2003年,该车辆在大江试验线进行运行试验,最高速度达100 km/h.2005年,以HSST-100L为基础的东部丘陵线(Linimo线[33])开通运营,设计最高速度100 km/h[34],如图6所示.

图6 日本中低速磁浮“Linimo”线Fig.6 Japan medium and low speed maglev “linimo” line
除日本航空公司研究的电磁悬浮外,日本国有铁道(Japanese National Railways,JNR)长期致力于高速超导电动悬浮列车研究[35].1972年,ML100原理车研制成功.1977年,JNR建成一条长7 km的宫崎试验线,并于1979年采用ML500试验车创造了不载人运行速度517 km/h的世界纪录[36].1990年开始,日本着手修建42.8 km长的山梨试验线,并于1993年完成了其中的18.4 km.1997年,在山梨试验线上,MLX01型列车不载人运行速度达到550 km/h.2015年4月21日,日本低温超导电动磁浮L0系车型[37](图7)在山梨试验线上跑出了载人603 km/h的世界纪录[38].在磁浮列车的研发过程中,日本也申请了大量专利,占比24.66%,排行第二[13].

图7 日本高速L0磁浮列车Fig.7 Japan high-speed L0 maglev train
1.3 德国磁浮列车发展史
除了以日本HSST为代表的中低速电磁悬浮技术外,还存在一种高速电磁悬浮技术.两者之间最显著的区别是:中低速电磁悬浮技术无独立的导向系统,当车体横移时,悬浮磁场会发生畸变,依靠电磁吸引力产生横向恢复分力抵抗偏移,实现的导向[39],但导向能力有限[40];高速电磁悬浮技术则包含独立的导向系统,且一般为长初级驱动[41].高速电磁悬浮列车以德国TR为代表.德国经过50年的努力,技术上已趋成熟.1969年,KM公司推出电磁悬浮模型车TR 01.1971年,KM公司推出TR 02并投入试验,车重11.3 t,试验速度达164 km/h.1975年,Thyssen Henschel公司首次将悬浮和直线驱动集成到一个单元中,开发了新型磁浮试验列车TR 05,区别于早期系列,该型号更具高速潜能,并于次年进行试验基地建设,同期开始研发面向应用的试验车TR 06.1982年,TR 06在埃姆斯兰试验线(transrapid versuchsanlage emsland,TVE)上进行试验[42].1988年,TR 06速度达到413 km/h.1993年,TR 07型磁浮列车在TVE试验线上的最高速度达到450 km/h[43].2003年,TR 08列车在上海磁浮线上达到了501 km/h的最高试验速度.2009年,TR 09新型磁浮列车在TVE试验线上进行测试,最高速度达550 km/h.德国磁悬浮列车技术专利占总体的20.44%,排行第三[13].
1.4 其 他
韩国参考日本HSST技术,于2016年2月开通了仁川机场至仁川龙游站磁悬浮线路,如图8[44]所示.美国关注于永磁悬浮技术,并应用于短途线路,如美国试验车MagTube(图9)[45].

图8 韩国EcoBee磁悬浮线Fig.8 Korea EcoBee maglev line

图9 MagTube (美国)Fig.9 MagTube (America)
除上述的日本低温超导电动磁悬浮列车外,由美国劳伦斯利弗莫尔国家实验室的一组科学家研发的Inductrack方案[46]是一种永磁电动磁悬浮系统.此系统使用轨道中的无源线圈和列车上的永久磁铁(排列成Halbach阵列)作用实现磁悬浮[47](图10).

图10 美国中低速Inductrack系统Fig.10 American medium and low speed Inductrack system
除中、日、德三国外,美国、韩国、法国、英国、俄罗斯、意大利和加拿大在磁悬浮研究过程中也申请了大量专利:美国(10.69%)、韩国(4.37%)、法国(2.45%)、英国(2.23%)、俄罗斯(1.25%)、意大利(0.71%)和加拿大(0.57%)[13].这些数据显示了不同国家在这一特定领域开展研究的活跃程度,具有重要意义.
2 磁悬浮技术分类
根据悬浮原理,作者将主要磁悬浮技术分为永磁悬浮(permanent magnet levitation,PML)、电磁悬浮(electromagnetic suspension,EMS)、电动悬浮(electrodynamic suspension,EDS)和超导钉扎悬浮(superconducting pinning levitation,SPL),如图11所示.

图11 磁浮方式的分类Fig.11 Classification of maglev modes
永磁悬浮技术原理简单,但由于固有的不稳定性限制了其应用.如前文所述,电磁悬浮和电动悬浮技术应用已达到较高的成熟度和可靠性.高温超导钉扎悬浮起步较晚,正处于实验室研究和工程化样车研发阶段.
此外,直线电机因无机械接触、结构简单、平稳可靠等特点,是磁悬浮列车驱动系统中不可或缺的一部分.目前,应用于磁悬浮列车驱动的直线电机主要类型有直线感应电机、常导直线同步电机、超导直线同步电机和永磁直线同步电机等.北京交通大学吕刚[48]对直线电机在轨道交通中的应用与关键技术进行了综述.
2.1 永磁悬浮
2.1.1 永磁悬浮工作原理
永磁悬浮利用车载永磁体与轨道永磁体之间的排斥力(图12(a))或者吸引力实现悬浮,具有承载能力强等优势.当使用排斥力进行悬浮时,在垂直方向上稳定,但在横向上不稳定,需增加导向轮(图12(b));当利用吸引力进行悬浮时,在横向上稳定,垂向上不稳定,需增加主动控制的电磁铁或其他方式来限制其运动.此外,在通过曲线时,亦需要导向轮进行辅助导向.

图12 永磁悬浮原理Fig.12 PML schemes
对于两个永磁体之间的力,可以用麦克斯韦张量法计算,如式(1).

式中:Fz为悬浮力;Fy为导向力;By为磁通密度的横向分量;Bz0为永磁体表面磁通密度的垂直分量;Lx为磁体沿车体运动方向的长度; μ0为空气磁导率.
2.1.2 永磁悬浮的优缺点
近年来,随着永磁材料尤其是稀土永磁材料的迅猛发展,单位体积永磁体产生的吸引力或排斥力大幅提升[49],使得永磁悬浮也成为一种可行的磁悬浮交通方式.此系统有以下优势:
1) 永磁悬浮系统不需要通电,利用车载永磁体与磁轨之间的纯磁斥力(或吸引力)进行悬浮,可实现“零功率”悬浮.
2) 永磁悬浮系统结构简单,无噪音、造价低、维修使用方便且载重能力强,在货物运输领域具有一定的潜能.
然而,早在1842年,英国数学家Earnshaw[50]就证明了一个永磁体不可能仅由另一个永磁体来进行稳定的悬浮支撑,必须至少有一个自由度被其他方式所约束.在永磁悬浮系统中,当悬浮模块完全对中时,侧向力为0;当悬浮列车发生横向偏移时,将产生侧向力,方向与偏移方向一致,进一步促使车体横移翻滚,进而带来失稳的风险.所以,在此系统中必须加入导向轮或电磁悬浮控制.
2.2 电磁悬浮
2.2.1 电磁悬浮工作原理
电磁悬浮基于电磁铁和铁磁轨道之间产生的吸引力来实现悬浮(图13(a)).该系统为开环系统,所以在原理上不稳定,需要精确的主动控制系统来保持车体与轨道间的均匀气隙(10 mm左右).
按照有无独立导向系统,电磁悬浮系统可分为以下两个方案:
1) 具有独立悬浮和导向功能的高速电磁悬浮系统(图13(b)),例如:德国高速 Transrapid[51]系统.
2) 具有集成悬浮和导向功能的中低速电磁悬浮系统(图13(c)),例如:日本 Linimo 线[52]、韩国EcoBee 线[53]、长沙线[54]和北京“S1”线[55].

图13 电磁悬浮系统应用Fig.13 EMS system application
电磁铁和铁磁轨道之间产生的吸引力可以通过式(2)计算.

式中:Fz(i,c)为电磁铁与铁磁轨道间的吸引力;N为电磁励磁绕组的匝数;A为磁芯磁极面积;c(t)为气隙;i(t) 为控制线圈的瞬时电流;t为时间.
吸引力与电流正相关,与气隙负相关,如图14所示.图中:F0为初始吸引力;ΔF为吸引力的变化值;Z0为初始气隙;ΔZ为气隙的变化值.如果没有控制系统,悬浮力与电流的平方成正比,与气隙的平方成反比.所以,需在系统中加入合理设计的闭环控制系统,使吸引力将变得稳定.

图14 开环和闭环情况下吸引力与电流和气隙之间的关系Fig.14 Relationships between the attraction force and the current and air gap in the cases of open loop and close loop
2.2.2 电磁悬浮应用经验
电磁悬浮已应用于多条线路,表明了该系统技术对于城市商业应用是可靠的.
参考日本HSST技术建成的中低速电磁悬浮列车多采用短初级直线感应电机进行驱动,例如,日本Linimo磁浮列车、韩国EcoBee磁浮列车和我国的长沙线磁浮列车.电机初级线圈安装在车上,次级部分则安装在轨道上,利用车上初级绕组的磁场与次级铝板中感应电流之间的电磁作用驱动列车行驶.其效率较低,推力较小,运行速度有限,同时还需要通过导电轨向车辆输送电流;但电机控制系统简单,系统造价较低[56].
常导低/高温超导电动悬浮直线同步电机(又叫有铁芯常导直线同步电机)因具有较高的效率和功率因数,多用于高速电磁悬浮列车,例如德国TR系列磁浮列车和我国时速600 km的高速磁浮列车.通常将长初级沿线铺设在轨道上,次级安装于车上.初级通过地面大功率变流器供电并调速;次级通过直线谐波发电机无接触励磁[48].但其电机控制系统较为复杂,系统造价更高.
高速磁浮列车多采用的直线同步电机为多相交流电供能.相较于三相电机,多相电机具有冗余特性[57],当故障发生时,只要剩余的正常相数大于3相,理论上可通过适当的控制技术,在不改变电路结构的前提下,实现容错运行.对高速磁浮列车而言,位置检测至关重要,而一般传感器易受外界温度、湿度及振动等影响,导致测量精度变差,甚至影响系统的可靠性.此外,长初级分段供电技术也在高速电磁悬浮系统中起着关键作用,需要进一步研究.在高速运行状态下,如果控制延时,将会引起推力波动,甚至造成电机失步,影响高速磁浮系统运行稳定性.
实践应用表明,电磁悬浮列车也有一些不足之处,对自身结构、高架线路和控制系统都非常敏感.系统工作时的小悬浮间隙(约10 mm)要求运行轨道的平顺性精度非常高,从而使施工难度和成本变高.
磁浮列车、悬浮控制及桥梁之间存在特殊的强非线性耦合动力作用关系,可能影响列车的悬浮稳定性.磁浮列车在轻型道岔梁上运行或低速运行时,列车-道岔耦合振动和车-轨耦合振动尤为严重,易导致悬浮失效.
目前抑制车-轨耦合振动的主要措施是加强轨道结构,使其具有较高的固有频率,但会导致系统造价高昂.在施工之前,需要通过对车辆-轨道耦合振动的预防性分析,优化悬浮控制系统以改善耦合振动.
2.3 电动悬浮
2.3.1 电动悬浮原理、特性及分类
1) 电动悬浮原理及特性
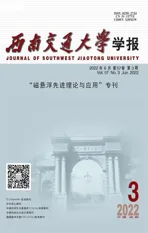
电动悬浮制式均可通过楞次定律来解释,根据“磁生电”原理,车载磁体的运动会在空间中产生时变磁场,而这又会在导体内部产生感应涡流,由“电生磁”再产生感应磁场与源磁场发生电磁作用,进而产生电磁力,具体表现为悬浮力、磁阻力和导向力,如图15所示.电磁力产生于导体中的涡流J[58],可由3个方向的分量表示,即J=Jxi+Jyj+Jzk,根据洛伦兹定律F=J×B可知:涡流中的Jx分量能够产生悬浮力和导向力;Jy可以产生悬浮力和电磁阻力;而Jz则产生电磁阻力和导向力,B为磁感应强度.
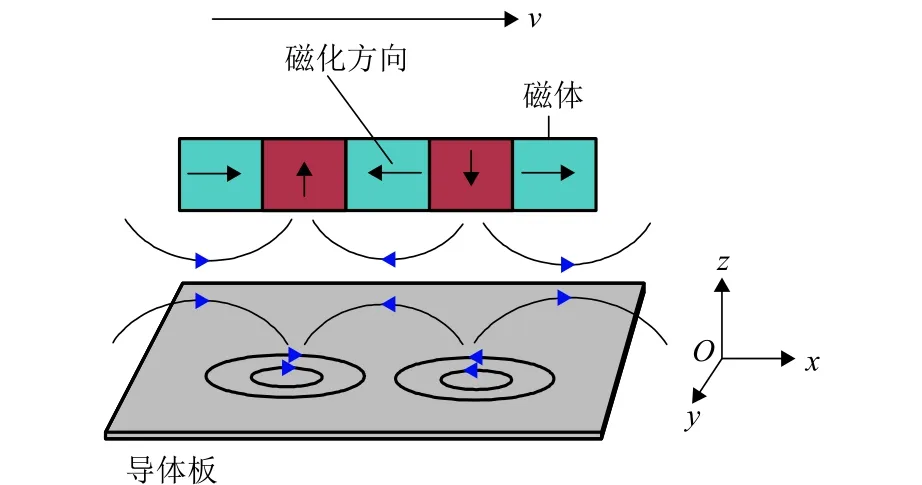
图15 电动悬浮原理示意Fig.15 Schematic diagram of EDS
在电动悬浮制式中,浮重比(单位车载磁体重量的悬浮能力)和浮阻比(悬浮力与磁阻力比值)是两个重要的评价指标:前者用来评价整个系统的载重性能即悬浮能力,后者是评价系统能耗指标之一.此外,电磁力的产生源于“相对运动”,而轨道总是静止固定在地面,相对运动由车载磁体的速度决定.因此,电磁力会随着车体运行速度的变化而改变,在整个运行速域内存在几个特征速度即起浮速度、临界速度、饱和速度,不同的速度区间,呈现出不同的电磁特性,如图16所示.当列车从静止开始加速到起浮速度阶段,由于导体板中感应电流的增大,悬浮力增加,当与车重平衡时实现悬浮.磁阻力是轨道电阻耗能的表现,速度越大电阻耗能越大;当超过临界速度后,磁阻力将随着速度的增大而减小.
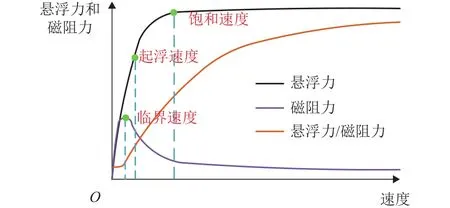
图16 电动悬浮系统浮阻特性Fig.16 Levitation and resistance characteristics of EDS system
2) 电动悬浮分类
电动悬浮按照磁场源可分为超导电动悬浮和永磁电动悬浮:永磁电动悬浮中的轨道形式可分为连续性导体板(铝板、铜板等)和离散分布的闭合线圈(梯形短路线圈、窗形短路线圈);又可按图17所示进行分类.
图17 电动悬浮制式分类Fig.17 Classification of EDS system
3) 低/高温超导电动悬浮
低温超导电动悬浮和高温超导电动悬浮,原理基本一致.日本低温超导电动悬浮通过车载低温超导磁体(简称为车载磁体)与“8”字形零磁通线圈相互作用,是目前唯一大悬浮间隙下(约100 mm)实现603 km/h载人运行速度的技术,其悬浮导向自稳定,不需要额外的悬浮控制系统,本节将重点介绍该制式.
如图18所示为低温超导电动悬浮列车截面示意图,超导磁体是系统的核心,它提供了强大的磁场源.磁场越大,悬浮力和推进力越大.U型轨道两侧铺设“8”字形零磁通式线圈用于悬浮和导向.“8”字形线圈的结构及连接如图19所示,“8”字形排布保证了线圈上下环路磁极极性总是相反,交叉连接线提高了系统的导向性能.

图18 低温超导电动悬浮列车截面示意Fig.18 Diagram of LTS EDS train
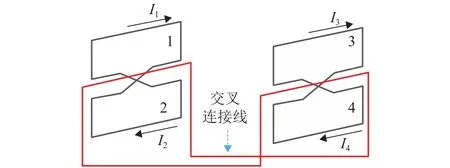
图19 “8”字形零磁通轨道线圈线路(含交叉连接线)Fig.19 Diagram of “8”- shaped null-flux track coil with cross-connected line
当列车运行时,基于零磁通原理,当车载磁体中心线相对于线圈中心向下偏移一定距离后使得线圈上下部的磁通不一致,线圈上部对磁体产生吸引力,下部产生排斥力(上拉下推),克服车体重力实现悬浮,原理如图20(a)[59].

图20 低温超导电动磁浮悬浮导向推进功能原理Fig.20 Suspension, guidance, propulsion of LTS EDS
当车体发生左、右偏移时,轨道左、右两侧线圈的磁通发生变化,轨道两侧“8”字形零磁通线圈采用交叉连接形式,由于电流守恒,横向移动过程中左、右“8”字形零磁通线圈的磁通总和为0,一侧产生排斥力,另一侧产生吸引力,使车辆对中.如列车向左偏移时,左侧的线圈对磁体产生排斥作用,使列车回到平衡位置,实现导向,如图20(b)所示.推进系统为超导直线同步电机(又叫无铁芯超导直线同步电机),次级为车载磁体,初级安装于U型轨道的两侧,进行推进驱动.当两侧线圈通以三相交流电后,沿着运动方向的后侧线圈产生斥力,前侧“8”字形零磁通线圈电流产生的磁场与车载磁体磁场作用产生吸力.在两个力的共同作用下,车辆具有向前的推进力,如图20(c)所示.因此,车载磁体可同时实现悬浮、导向和推进,整个系统具有自稳定性.
以一个车载磁体和一个“8”字形零磁通线圈的基本单元为例,电路方程如式(3)所示.

式中:L为零磁通线圈的上、下环路的自感;R为上下环路的电阻;M12为上、下环路的互感;e1和e2分别为空间磁场在零磁通线圈的上、下环路中的感应电动势;ω为电流的角频率,与运行速度成正比;I为“8”字形零磁通线圈中的电流.
由式(3)求出I后,可采用能量法求出运动的超导磁体和“8”字形零磁通线圈间的相互作用力,如式(4).

式中:MU和MB分别为超导磁体和“8”字形零磁通线圈间上、下环路之间的互感;fx、fy和fz分别为磁阻力、导向力和悬浮力.
由式(4)可以看出,除悬浮力和导向力外,还存在阻碍列车移动的磁阻力.
将车载磁体中的低温超导线圈更换为高温超导线圈即为高温超导电动悬浮,正逐渐成为研究热点[60].
4) 直线型Halbach永磁电动悬浮
永磁电动悬浮系统的发展主要集中在美国,而永磁体的磁能难以达到超导体的水平,Halbach阵列排布方式的出现一定程度上缓解了这个问题.Halbach永磁阵列可产生单侧浓缩型磁场,使得工作侧磁场显著加强,非工作侧磁场明显减弱,提高磁场利用率的同时还起到自动屏蔽的作用.根据轨道上采用导体不同,可分为良导体板式和线圈式.永磁电动悬浮中的Halbach永磁阵列一般是平面式的,若将Halbach永磁阵列设计为环形“轮式”结构即为旋转型永磁电动悬浮,则根据旋转的方向不同,又可分为轴向式[61]和径向式[62].
2.3.2 电动悬浮应用经验
1) 低温超导电动悬浮应用经验
低温超导电动悬浮系统的“8”字形零磁通线圈不连续铺设,导致电磁力的波动,且系统一系悬挂的被动电磁阻尼较小,所以需要减振控制[63-64].目前,国内以等效实验和仿真研究为主[65].在仿真研究中最为突出的一个问题是电磁系统中的磁-电耦合计算与动力学系统中的力-运动耦合计算是相互独立的,难以相互匹配.一般在动力学计算中将车载磁体与“8”字形零磁通线圈之间的磁-电耦合作用等效为一个定刚度和定阻尼的振动系统会带来误差,不能很好反映超导电动悬浮系统实际运行过程中的动态特性,具有明显的局限性[66].出于精细化仿真需求,要考虑车载磁体与“8”字形零磁通线圈之间的磁、电、力等多场参量的耦合作用,建立更为精确、全面反映车-轨耦合超导电动悬浮列车动力学计算模型.此外,对国内研究者来说,车载磁体的低温保持系统也是设计研究的难点之一.
2)永磁电动悬浮研究应用经验
1972年,以麻省理工学院Montgomery教授为首的一些专家提出Magplane的设计概念,以弧形的铝板结构为轨道,车载磁体为Halbach永磁体阵列,悬浮高度在50~150 mm之间[67].采用长初级直线电机驱动,初级沿轨道连续分布,车载永磁体次级(Halbach阵列)安装在车体中央,由轨道上初级绕组(驱动绕组)的高频交流电供能[68].该方案结构简单,载重能力强,悬浮间隙大,对轨道的平整度要求较低.但是,该方案的导向力是通过悬浮力的分力来提供,这种导向是不稳定的,难以支撑高速运行的需求;轨道采用整块铝板使得涡流发热较为严重,从而使得轨道阻抗发生变化,附加的冷却装置又会使得结构变得复杂.最重要的是,该方案会产生很大的磁阻力,再考虑到气动阻力损耗、供变电系统的效率及漏磁损耗等问题,Magplane的能量损耗相对于其他形式的磁悬浮列车的能量损耗都是较高的[67].
基于Halbach永磁阵列,美国通用原子公司设计了两套Inductrack悬浮系统,分别为高速Inductrack I方案和低速 Inductrack II方案(图10)[46]:a) Inductrack I的轨道铺设窗形短路线圈,车载磁体采用Halbach排列的永磁体,短路线圈型轨道使系统的浮阻比提高,特别在高速状态下更显著,适用于高速交通.b)Inductrack II方案着眼于低速交通,采用双排Halbach阵列永磁体的布置方式,使得垂直磁场相互抵消,水平磁场相互叠加,降低了低速运行时的磁阻力,提高了浮阻比.该方案同样采用永磁直线同步电机推进,长初级铺设于轨道沿线,永磁结构次级安装于车辆的悬浮臂上,实现牵引[48].
此外,目前没有一种很好的永磁电动悬浮制式能实现自稳定导向,这也是阻碍该技术进一步发展的重要因素.
2.4 高温超导钉扎悬浮
2.4.1 高温超导钉扎悬浮工作原理
常用于高温超导钉扎悬浮系统的高温超导材料—块状YBaCuO,是一种非理想第二类超导体.这类具有钉扎性能的材料无法被其他材料替代,具有唯一性[69].这类超导体具有超导态和正常态共存的混合态,可以承受更强的电流和外磁场.因具有“钉扎能力”,能把磁通线“钉住”[70],实现稳定悬浮.
高温超导体在零磁场下冷却进入超导态的冷却过程为零场冷.此时的超导体再与永磁体接近,会产生电流,由于超导性,电流不会消失.电流产生的电磁场与外磁场相反,达到排斥作用,如图21所示[71].根据Earnshaw[50]的理论,此种悬浮方式不稳定.
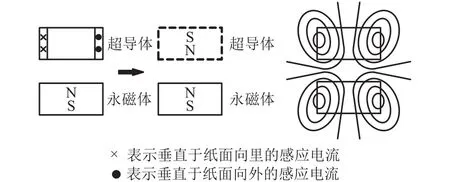
图21 零场冷悬浮方式Fig.21 Zero field cooling suspension mode
高温超导体在磁场环境下冷却进入超导态的冷却过程称为场冷.冷却前,磁场可以穿过处于正常态的高温超导体.高温超导体冷却进入超导态后,由于钉扎中心的影响,量子磁通线被高温超导体的缺陷或其他各种势阱所束缚,形成“磁通钉扎”效应.此时,高温超导体系统既可以产生排斥力又可以产生吸引力,此种力的组合决定了高温超导钉扎悬浮系统的稳定悬浮,不需要主动控制,如图22(a),所以实际高温超导钉扎悬浮系统一般采用场冷悬浮方式.在实际运输应用中,高温超导钉扎悬浮(HTSPL)系统(图22(b))可以达到 10~30 mm 的悬浮高度.
在高温超导钉扎悬浮系统中,用液氮(77.0 K)代替低温超导电动悬浮系统中的液氦(4.2 K)来冷却超导体,该方案结构简单且更具经济优势.
在高温超导钉扎悬浮系统的悬浮导向二维模型中(图22(a)),悬浮力Fz和导向力Fy可以分别通过式(5)和(6)来计算.

图22 高温超导钉扎悬浮方案Fig.22 HTSPL scheme

式中:Bz分别为垂直方向上的磁通密度分量;V为超导体的体积.
由于轨道磁场沿着运行方向均匀分布,高温超导钉扎悬浮系统在运行方向上无固有磁阻力,更易实现高速运行.
2.4.2 高温超导钉扎磁浮研究进展
早在1997年,中国和德国联合研制出一辆高温超导钉扎悬浮模型车[72],该车重20 kg,悬浮高度7 mm,轨道直径3.5 m.随后,其他各国也相继加入研究:在德国德累斯顿建造的SupraTrans[73]、在意大利拉奎拉建造的UAQ4[74]、在巴西里约热内卢建造的Cobra[75]、在日本东京建造的AIST[76]和在俄罗斯建造的磁悬浮车等[77].
2000年12月31 日,西南交通大学王家素团队研制出世界首辆载人高温超导钉扎悬浮车,取名“世纪号”[78].“世纪号”采用长初级直线感应电机驱动[79],初级线圈安装于轨道中央,感应板次级安装于车辆底部.图23为“世纪号”高温超导钉扎悬浮车照片[80].2013年2月,一条45 m长的高温超导钉扎悬浮环形试验线在中国成都研制成功[81](图24).磁悬浮车长2.2 m,宽1.1 m,悬浮高度为10~20 mm;永磁导轨(长45 m,轨距0.77 m)为跑道形状,曲线半径为6 m;最高运行速度为50 km/h[81].该环行线采用与“世纪号”类似的长初级直线感应电机驱动,但直线电机铺设长度只有3 m,试验车每次经过的时候加速/减速一次.

图23 “世纪号”高温超导钉扎悬浮车Fig.23 “Century” HTSPLvehicle

图24 高温超导钉扎悬浮环形试验线Fig.24 HTSPL ring test line
2004年,德国固体与材料研究所Leibniz-Institut für Festkörper-und Werkstoffforschung Dresden(IFW)[73]研制成功高温超导钉扎悬浮实验车“Supra Trans I”,最大载重能力为350 kg.改进后的第二代高温超导钉扎悬浮环形试验线“SupraTrans II”于2011 年完成[82]( 图25),可承载 2 人,速度为 20 km/h,轨道为80 m的环形线,采用短初级直线感应电机进行驱动[83],初级安装在车辆底部,次级感应板铺设在线路上.“世纪号”以及两代“SupraTrans”的轨道磁场均为单峰分布结构.巴西里约热内卢联邦大学于2014年研制完成高温超导钉扎悬浮试验车“Maglev-Cobra”和一条长度为200 m的试验线[75,84]( 图26).“Maglev-Cobra”应用短初级直线感应电机,电机初级绕组安装于车体上,次级感应板铺设在轨道中央,可以减少铺设线圈的费用,但是需在车体上安装受电装置.

图25 “SupraTrans II”高温超导钉扎悬浮车Fig.25 “Supratrans II” HTSPL vehicle

图26 “Maglev-Cobra”高温超导钉扎悬浮试验线Fig.26 “Maglev-Cobra” HTSPL test line
随着研究的不断推进,2021年,西南交通大学成功研制高温超导钉扎悬浮的工程化样车(图27).车身由碳纤维复合材料制成,长21 m,宽3.2 m.车辆可载客30人,悬浮高度10 mm,最大悬浮重量15 t;由空芯永磁同步直线电机实现驱动,初级绕组为空芯线圈,铺设在线路上,永磁体次级安装在车辆底部.
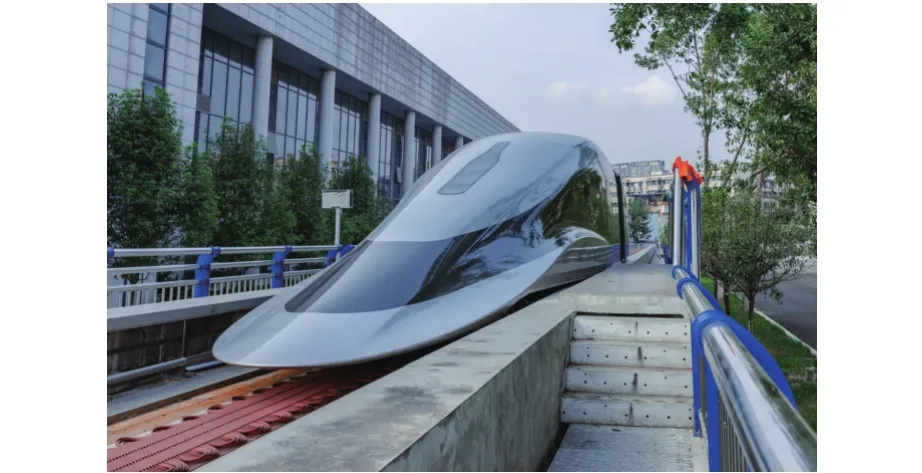
图27 高温超导钉扎悬浮的工程化样车Fig.27 Engineering prototype of HTSPL
2006年前后,西南交通大学研究团队[85]、北京航空航天大学[86-87]团队将高温超导钉扎悬浮与电磁弹射相结合,分别搭建了磁浮助推模型并针对相关动态性能开展了诸多实验研究.
对于高速磁悬浮列车来说,研究其动态性能至关重要,学者们针对高温超导钉扎悬浮的动态性能进行了大量研究.首先,利用有限元法研究了高温超导块材中的磁感应强度、内部电流密度和悬浮力之间的关系[88];为了研究高温超导块体在外加磁场作用下的运动规律,建立了悬浮力和导向力的数学模型[89-91];基于这些模型,系统地研究了高温超导块材在永磁Halbach轨道场中的非线性振动特性[92],并引入最小二乘法辨识悬浮力模型中的参数[93];采用遗传算法对超导块材和Halbach型永磁轨道系统进行整体智能优化[94];针对高温超导钉扎悬浮系统的弱阻尼特性,引入电磁分流阻尼器,成功地抑制了非线性振动[95];此外,还引入涡流阻尼器抑制振动[96];通过实验和仿真对车辆动力学进行了研究[97].近年来,高温超导钉扎悬浮车-桥耦合动力学得到了广泛的研究[98-99].
为便于工程应用,还开展了其他一些研究工作.例如,对永磁轨道进行优化以增强悬浮力[100].设计了电磁道岔以使车辆实现转弯[101],并引入永磁混合悬浮以提高悬浮性能[102].解决了高温超导钉扎悬浮高速运行时的部分主要问题,进一步证明高温超导钉扎悬浮列车具有超高速运行的潜力.
3 高速磁浮列车应用技术难点
磁浮交通虽有诸多技术优势,面向高速,也还有诸多的技术难点和关键科学问题需要解决.
3.1 高速悬浮技术验证
磁悬浮交通系统是一种高速的地面运输系统,可填补时速400~800公里领域的空缺,为出行提供更便捷、更多样的选择.但目前,对于此类系统高速度域(时速600公里级)载人运行的验证,仅有日本低温超导电动悬浮系统于2015年试验成功.目前,本课题组研制了一台圆盘型超高速磁悬浮试验台[103],但还缺少直线型磁悬浮高速试验平台.所以,现如今全世界范围内都亟需实验台或试验线来验证磁浮交通系统高速载人运行的可靠性与可实施性.
3.2 直线同步电机的控制策略
无论采用何种高速磁浮制式,均可采用直线同步电机牵引.在高速下,如果位置检测偏差,或者数据传输延时,可能引起推力波动,甚至造成电机失步,影响高速磁浮系统运行安全.另一方面,车辆的振动也可能引起悬浮间隙的变化,进而引起驱动不连续.部分学者正在研究基于神经网络自适应的永磁直线同步电机控制方法[104].
3.3 紧急制动策略与实施
随着速度的提升,列车安全制动能力也是核心问题之一.面向时速600公里,需要考虑涡流制动与摩擦制动相结合的方式,通过合理的控制策略调节,实现不同制动手段的共同作用,保证紧急制动下的精确停车.在此过程中,对涡流制动感应板发热与损耗等问题的研究需重点关注.
3.4 磁浮线路的状态监控与维护
作为高速磁浮的重要组成部分,轨道的精度控制也是施工与维护的技术难点之一.为保证磁浮列车运行的高速、平稳和长使用寿命,对磁浮轨道状态监控与维护的研究不可或缺.可基于车线桥耦合动力学研究,以车辆运行品质为控制目标,反向对桥梁、轨道提出技术要求,并长期监测车辆运行状态,进而监测桥轨结构,掌握长期服役下轨道线形劣化规律.并开展线路维护标准与策略研究,为问题线路的维护与调整打下基础.
3.5 高效无线传能技术
面向高速应用,采用受流轨或受电弓供电已不再适用,所以非接触式无线传能成为选择.德国新一代TR 09高速磁浮列车和日本L0系统改进型样车都采用基于磁场耦合的高速磁浮非接触供电系统.目前,这一技术尚有部分问题亟待解决,如高速磁浮非接触系统动态高频电磁耦合机理及能量传输规律和高速运行状态下非接触供电电磁场分布规律、电磁干扰抑制与屏蔽等.此外,部分学者已开始着眼于将超导线圈应用于无线传能领域.然而,超导接头、开关等尚需进一步的应用验证.
3.6 高速车地通信技术
高速磁悬浮列车安全、高效地运行离不开无线通信系统的支持.面向时速600公里高速磁浮应用,对车地之间的通信稳定性、可靠性要求随之变高.高速移动会带来频繁的越区切换和多普勒效应问题[105].高速磁浮列车牵引与悬浮控制系统一般要求列车位置信息的传输延迟在5 ms以内,对无线通信系统提出了挑战.如果采用真空管道传输的方式,金属密闭管道内还会存在波导现象,导致管道内无线覆盖困难[106].所以,须对车地综合通信系统开展前瞻性研究,在漏泄电缆或漏泄波导覆盖方式下无线接入5G技术形成系统解决方案[107].
3.7 气动噪声与列车绕流问题
高速磁浮列车气动噪声的大小主要取决于运行速度,气动噪声正比于运行速度的6次方至8次方[108].明线运行的高速磁浮列车气动噪声产生机理可归纳为由湍流流动产生的噪声和气流流经结构部件表面产生的噪声.因此,面向高速运行,需优化高速磁浮列车车头及车身外部形状.有学者已将机器学习应用于车型优化中.此外,也需增加车身和隧道结构的隔声性能.如采用双层浮筑地板增强车厢地板的隔声性能,调整车厢夹芯板厚度增强车厢板材的隔声性能.但是,目前我国磁浮列车缺乏相应的试验线与600 km/h的声学风洞,还需对磁浮列车气动声学设计进一步研究.
列车外部绕流问题也需重点关注,尤其是在隧道中运行时,车尾涡流脱落频率可能接近于悬浮系统的固有频率,进而带来共振的风险.
3.8 磁浮道岔的设计
磁浮道岔是磁浮道路子系统的关键部分,对磁浮列车的稳定运行有重大影响,设计不合理极易引起车-岔耦合振动等问题.道岔是一个结构、机械和电气控制一体化的系统,各个部分之间密切关联,需要建立一体化的性能分析和评估模型.需要对各类故障组合下道岔的运行状态及其影响后果作出判断,最大限度地帮助改进设计,提高系统的可靠性.针对超导钉扎磁浮而言,有学者正在探索将电磁道岔应用其中[109].
4 超高速磁悬浮真空管道运输
牵引列车所需的能量是由列车和环境之间的相互作用决定的,主要用于克服摩擦力和空气阻力.当列车在空气条件下高速运行时,气动阻力是总阻力的主要部分,与速度的平方成正比.实验数据表明,当列车速度超过400 km/h时,气动阻力最少占总阻力的80%[110].特别是高速列车在常压隧道中行驶时,气动阻力甚至超过总阻力的90%[111].因此,为了降低牵引列车所需的能量,进一步提高运行速度,首先要解决的是消除所有机械接触,其次是减少列车高速运行时占主导的气动阻力.磁悬浮技术可以避免与轨道接触,但仍须考虑列车在超高速下产生的气动阻力.
为了避免这种物理限制,一种替代技术方案是在低气压管道内运行磁悬浮列车,并优化其外形.在这样的环境条件下,列车的速度可以达到亚音速,甚至是超音速[112].
4.1 超高速磁悬浮真空管道运输研究进展
1945年,美国的Goddard提出了“真空管道运输”的设想[113].英国的Foa教授对这一研究方向做出了重大贡献,领导了一个名为“TubeFlight”的项目,设计一种形状像飞机机身的飞行器,由气垫装置支撑,并选取了一种流动感应装置来推动飞行器通过管道[114].
然而,因为系统核心基础的磁悬浮技术一直没有突破,这个想法已经沉寂了一百多年.随着磁悬浮技术的日益成熟,学术界和工业界开始重拾该项研究.2013年,美国Musk提出了Hyperloop的概念,旨在设计一种时速可达1 200公里的超高速度、远距离并具有真空管道特征的交通运输系统,随即在全球掀起了超级高铁的研究热潮,中国、美国、德国、荷兰、加拿大、西班牙、韩国等国纷纷加入这场速度竞赛.
SpaceX公司从2016年开始连续举办了四届超级高铁设计大赛,2019年7月,来自德国慕尼黑工业大学的“TUM超级高铁”团队在1.6 km长的真空管试验线上创造了463 km/h的试验速度[115].
目前,致力于将Hyperloop技术设想工程化的主要美国公司有Virgin Hyperloop One和Hyperloop Transportation Technologies(HTT).2017年,美国Virgin Hyperloop One研究团队采用永磁电动悬浮,在500 m真空管试验线上实现了387 km/h[116](目标速度1 200 km/h)的速度,并于2020年11月9日,进行了首次载人(两人)试验,最高速度为172 km/h,如图28所示[117].2018年,美国HTT公司在西班牙展示了其首款超级高铁全尺寸车.

图28 “Maglev-Cobra”高温超导钉扎悬浮试验线Fig.28 "Maglev-Cobra" high temperature superconducting pinning suspension test line
此外,KRRI于2017年提出了目标速度为1 200 km/h的HyperTube管道列车项目;荷兰Hardt Hyperloop超级高铁公司于2019年开发了一套Hyperloop全尺寸试验系统;加拿大TransPod公司(2015年成立)与西班牙Zeleros Hyperloop管道磁浮公司(2016年成立)均提出以航空发动机技术为基础开展Hyperloop的研发,如图29所示[118].

图29 Zeleros Hyperloop概念图Fig.29 Zeleros Hyperloop concept
在中国,2004年底,两院院士沈志云教授在成都组织包含6名院士在内的20余名学者举办了“高速真空管道运输”研讨会.与会学者就沈院士的观点进行了广泛的探讨,论证了低真空高速轨道交通的必要性和可行性[119].
作者所在团队于2014年6月将高温超导钉扎悬浮与真空管道概念相结合,成功搭建并调试了世界上第一套集悬浮、导向、牵引、通信于一体的超导钉扎磁浮-真空管道试验系统“Super-Maglev”[120-121],如图30所示.2014年7月,美国IEEE Spectrum针对真空管道高温超导钉扎悬浮试验平台“Super-Maglev”以“A SUPER CHUTE”为题进行了报道,引起了人们对高温超导钉扎悬浮列车技术和真空管道交通发展趋势及其对社会和商业影响的关注和探讨.

图30 高超导钉扎悬浮-真空管道运输原型“Super-Maglev”Fig.30 HTSPL-ETT prototype“Super-Maglev”
表1列出了“Super-Maglev”平台的关键性能参数[121].

表1 高温超导钉扎悬浮-真空管运输原型“Super-Maglev”参数Tab.1 Parameters of HTSPL-ETT prototype“Super-Maglev”
2016年,西南交通大学超导与新能源研究开发中心建立了一辆侧面悬挂的high temperature superconducting-permanent magnet guideway (HTSPMG)磁悬浮原型车[122],该车在密封真空管中的环形轨道上运行.在第一阶段调试中,抽掉了管道中99%的空气,并在常压下磁浮实验车最大瞬时速度达到了87.5 km/h[123].2018年,当真空管道压力降至5 kPa时,该系统实现了160 km/h的最高运行速度[124].
2018年,作者所在团队开始搭建时速400公里级的真空管道高温超导磁悬浮高速试验平台[125],如图31所示[126].该线路全长140 m(双线),磁浮车为1/10缩比模型,最高实验速度可达430 km/h,应用常导双边同步直线电机进行驱动,由次级励磁线圈与其两侧沿线路铺设的初级线圈构成,加速段加速度可达8g~15g,减速段加速度可达15g~20g,为后续更高速度的真空管道高温超导磁悬浮试验台研制奠定了基础.该平台现可以进行如下实验:

图31 时速400公里级的高温超导钉扎悬浮-真空管道高速试验平台Fig.31 400 km/h class HTSPL-ETT high-speed test platform
1) 管道运输系统以及高速助推等相关实验;
2) 高温超导钉扎悬浮系统高速动态特性相关实验;
3) 多功能高温超导钉扎悬浮-真空管道运输系统的优化设计验证.
在此基础上,2020年5月,由西南交通大学牵头的“多态耦合轨道交通动态试验平台”项目正式启动.该项目计划于2023年完成建成1 620 m长、最高试验速度1 500 km/h的多态耦合轨道交通动态试验平台,如图32所示.这将成为超高速轨道交通领域最先进的综合研究测试平台.将为真空管道超高速轨道交通的基础科学问题和共性关键技术,以及大功率轨道助推技术和飞行器动力学仿真、空气动力学实验研究提供超高速低气压的试验环境.

图32 多态耦合轨道交通动态试验平台示意Fig.32 Schematic diagram of multi-state coupling rail transit dynamic test platform
4.2 现阶段需要研究的课题
超高速真空管道磁悬浮是一项新技术,目前尚处于探索验证阶段,离工程应用还有很长的路要走.即使真空管道运输系统因其在速度、节能和环保方面的潜在优势而具有巨大的未来潜力,但此系统仍处于早期阶段,因此仍有必要开展进一步的研究,以解决主要涉及车-轨耦合作用、推进、能源供应、车载储能、空气动力学、管道散热、管道密封、管内通信、噪声、车站、救援和应用领域的一系列技术问题[56,126].
1) 超高速磁悬浮列车牵引和制动技术:超高速磁浮真空管运输的最大困难是大牵引功率的需求,必须发展速度为1 500 km/h的直线驱动.该机械要求具有高效率、高可靠性、牵引稳定、电机法向力小等特点[68].采用大功率同步直线电机施加牵引力已成为共识.在低真空环境下电机的电、热特性、解耦机理、暂态能量转换控制规律等方面,都有一些亟待解决的科学问题.
2) 超高速磁悬浮列车悬浮和导向技术:对于超高速磁悬浮列车,大载重和强导向力可以保证运行和转向过程中的可靠性和安全性,是一个亟待研究的技术.
3) 管道-列车-气流-热耦合:由于低真空管道的密闭低压环境,管道内流动和传热行为异常复杂,管道内气动热环境随列车运行距离、车/管阻塞比、车速、管道压力等多种因素发生剧烈变化.因此,有必要开展以下方面的研究工作:a) 管道直径、列车轮廓、真空度和阻塞比等参数的系统优化;b) 管内激波产生、传播及相互作用机理;c) 气动热效应产生机理及散热策略;d) 管内气动噪声分布特征及降噪控制技术;e) 基于系统能源利用效率的热管理技术和布局.
4) 超高速低真空管道通信及运控技术:超高速磁浮低真空管道运输系统间耦合性强、速度快、控制复杂且可靠性要求高,需要精密的运行控制技术和大覆盖度、高传输速度和传输精准度的车地无线通信技术.
5) 长距离管道建设和抽真空效率:长、大管道需要高性能、抽速快、寿命长的真空设备.抽气设备安装位置也需要优化设计,以降低抽气成本.此外,管道内逐步调压技术还有待进一步探索.
6) 过渡舱技术与中间站端口对接技术:如何保证旅客上下车的过渡舱和中间站端口的密封性是一个很大的技术难题.一旦对接密封性不好,超强的真空度会产生极强的吸力,产生的后果不堪设想.对于高密封技术与对接技术可以参考较成熟的空间站对接技术.
7) 低气压适应性技术:列车行驶在低气压管道内,需要考虑低气压环境对列车牵引制动、悬浮导向、供电系统等的影响,还需考虑列车的密封性、材料服役性能、失效机制及防护技术.因此,对于磁悬浮交通各个子系统的低气压适应性技术亟须研究.
8) 安全与救援:与传统的交通形式不同,超高速磁悬浮列车完全密闭在真空管道内,这对安全救援带来了极大的挑战.真空管道外壁能承受高压,不易被破坏,如果在行驶过程中遇到事故,如何进行人员解救是一个不得不考虑的重要问题,因此真空管道磁浮列车安全救援技术亟需开展研究.
5 结束语
磁悬浮交通系统是一种非接触式运输技术,通过电磁力来实现悬浮、导向和牵引.由于优越的高速环保潜能,磁悬浮列车被认为是目前铁路行业重点研发的方向之一.
本文系统地阐述了磁悬浮交通系统的发展现状,简要地梳理了其应用中的技术难点,并对近年来世界范围内磁悬浮交通系统和真空管道磁浮交通的发展状况和研发活动进行综述.
磁浮交通具有卓越的高速潜能和环保优势,面向时速600 公里的应用,研究者们需在高速悬浮验证、直线牵引、紧急制动、车线桥耦合、线路监控维护、无线传能、车地通信、气动噪声、电磁道岔等方面进行进一步的研究.为了追求更高的速度,包含作者所在团队在内的多家研究机构将真空管道与磁浮技术相结合,开展了理论分析和试验探索.面向工程应用,还需在高速列车牵引制动技术、悬浮导向技术、管道内流固热耦合机理、空气动力学、管道散热、管内通信、长距离抽真空效率、过渡舱和中间站端口对接、低气压适应性技术、救援和应用等方面进行持续深入的研究.