基于数据驱动的磁浮列车悬浮系统参数整定
2022-06-22夏文韬龙志强
温 韬 ,夏文韬 ,周 旭 ,龙志强
(国防科技大学智能科学学院,湖南 长沙 410073)
磁浮列车是一种新制式的轨道交通系统,不同于传统的轮轨式列车,磁浮列车同轨道间是无接触的,列车车体依靠电磁力悬浮于轨道上方,该种制式列车具有安静舒适等优点.
磁浮列车的悬浮系统是保障列车安全和高质量运行的关键系统.在磁浮列车从主机厂组装首次投入运营时,以往通常需要根据悬浮系统数学模型来设计控制器,并整定好控制器参数,使悬浮系统能够高质量工作,稳定悬浮.实际工作中,常结合技术人员经验和现场试验的方法来整定控制器参数,这项工作需要耗费大量的时间和成本.此外,当悬浮系统长时间工作以后,由于在复杂工况下受到不确定扰动等因素,系统模型参数变化,控制性能退化,情况严重的可能会导致列车运行出现故障,此时,也必须要重新辨识被控对象数学模型,设计控制器,并整定控制器参数.由于磁浮列车的悬浮系统模型复杂,并且模型信息无法精确获取,因此控制器参数的整定将给磁浮列车悬浮系统的维护带来高昂的成本负担[1].
为了解决上述问题,开展了大量的数据驱动的控制器参数整定方法研究.例如迭代反馈整定[2-3]、虚拟参考反馈整定[4-5]、虚拟参考迭代整定[6]和基于非迭代相关的整定[7].这些方法根据系统的输入输出数据来调整控制器参数,避免了系统被控对象的模型辨识这一复杂工作[8-10].但是基于数据驱动的控制器参数整定方法存在以下问题:文献[11]基于闭环响应数据有限冲激响应估计的控制器整定方法,根据被控对象的输入输出数据,通过估计被控对象的有限脉冲响应(FIR)模型实现控制器参数的调整,然而该方法不能实现对不稳定被控对象FIR模型的估计;文献[12]基于虚拟时间响应的迭代增益控制器整定方法,根据单次实验数据,结合离散时间傅里叶变换,计算闭环系统的虚拟时间响应,从而整定控制器参数,但是该方法需要长时间的数据采集.
本文提出一种数据驱动的磁浮列车悬浮系统参数整定方法,该方法能够仅根据悬浮系统单次悬浮调试的输入输出数据来整定控制器参数,而无需悬浮系统的模型信息;通过引入虚拟信号来估计具有非最小相位或不稳定控制器的闭环响应,然后利用估计的闭环响应进行控制器参数整定,适用于不稳定系统并能够利用瞬态输入输出数据.
1 磁浮列车悬浮控制系统建模与分析
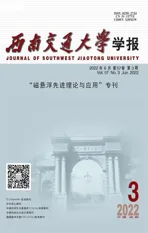
本文以长沙磁浮列车为研究对象,每节列车的悬浮系统通过5个转向架,20组电磁铁给车体提供悬浮力.忽略空气弹簧作用力的影响,悬浮系统通过转向架机械解耦后可以简化为单点悬浮系统,如图1所示.磁浮列车单点悬浮系统简化模型示意如图2所示.

图1 磁浮列车悬浮系统单转向架机械解耦结构示意Fig.1 Schematic diagram of mechanical decoupling structure of single bogie of maglev train levitation system
图2 磁浮列车单点悬浮系统模型示意Fig.2 Schematic diagram of single-point levitation system model of maglev train
考虑磁浮列车单点悬浮系统,经过在悬浮平衡点位置处线性化处理后的模型描述如下[13]:

根据长沙磁浮列车的数据可知: μ0=4π×10-7H/m,is=22.0A,zs=8.0 mm,N=360 匝,A=0.038 m2,R=0.92 Ω,m=535 kg.
实际磁浮列车悬浮系统调试过程中,常采用PID算法来设计悬浮系统控制器,针对悬浮系统电磁铁对象部分的一阶惯性滞后环节,可得

式中:Gi(s) 为电压转换电流环节的传递函数.
设计电流负反馈内环,如图3中红框部分,将悬浮系统降阶为二阶系统,悬浮系统的开环传递函数G(s)=Gi(s)Gz(s),其中,Gz(s) 为电磁铁部分的传递函数,如式(3).再进行悬浮间隙反馈回路PID控制器的设计[14].


图3 带有电流负反馈内环的悬浮系统闭环反馈示意Fig.3 Closed loop feedback diagram of levitation system with negative current feedback inner loop
此时取状态变量为 [Δz(t)Δz˙(t)]T,得到悬浮系统模型的状态空间描述为

根据长沙磁浮列车的数据可以得到此悬浮系统状态空间描述的系统矩阵,控制矩阵输出矩阵C=[1 0].
由该状态空间模型可知:悬浮系统存在位于右半平面的极点,磁浮列车悬浮系统是开环不稳定系统,需要设计闭环反馈控制器使该系统输出间隙值能够稳定控制在设定间隙位置处.并结合经验和试验整定得到最佳控制器参数,但是这个过程需要经过大量的试验才能够得到一组比较好的PID控制器参数.
2 基于数据驱动的控制器参数整定
在实际悬浮系统控制器调试过程中,虽然无法很快得到一组PID控制器参数使得悬浮控制器具有很好的性能,但是,根据调试经验以及数次试验,还是能够较快地获得一组能够保证系统稳定的控制器参数.在悬浮系统稳定的情况下,本文提出一种基于悬浮系统单次调试的输入输出数据的控制器参数整定方法,该方法能够不依赖悬浮系统对象的模型信息,设计完成具有优异性能的悬浮控制器.
本文提出的基于数据驱动的悬浮系统控制器参数整定方法不改变原有的控制器设计路线,保证了既有的悬浮系统控制器硬件配套控制板的兼容性,该方法是在原有系统基础上对悬浮系统控制性能的优化设计.因此,该方法非常适合用来解决磁浮列车悬浮系统现场控制器调试问题.
针对磁浮列车悬浮系统,通常可以采用基于模型参考的控制器调整方法,设计一个期望控制性能的闭环参考模型,则悬浮系统控制器参数整定的目标是使参考模型和系统实际模型之间的差异尽可能的小[15].
悬浮系统闭环反馈系统如图4所示,悬浮系统控制器参数整定目标可表述为最小化代价函数JM,如式(5).图中:P为被控对象的数学模型;C为控制器的数学模型;rt为悬浮系统的间隙设定值;u为控制器的输出(即电压);e为系统的跟踪误差信号;d为测量噪声.

图4 悬浮系统闭环反馈系统示意Fig.4 Closed loop feedback system of levitation system

式中:M为参考模型的传递函数;W为加权函数,用于控制系统某些频率范围内的性能[16].
悬浮系统对象P的信息对于该代价函数的最小化至关重要.
由于无法获取悬浮系统准确模型信息,而悬浮系统的输入输出数据可测量得到 并且能够反映模型的信息.因此,本文根据悬浮系统单次悬浮调试的输入输出数据来整定控制器参数.该数据驱动的悬浮控制器参数整定方法完全跳过了系统建模过程,而是将悬浮控制器(解决模型匹配问题的控制器)识别过程表述为参数优化问题,具体是直接对悬浮控制器参数进行优化[17].
2.1 基于虚拟参考反馈的悬浮系统控制器参数整定
考虑闭环系统中的参数化的控制器C,如图5所示,图中:rˆ (t) 为虚拟参考信号; θ 为待整定的控制器参数矩阵.如果e和悬浮系统输入信号u已知,则模型匹配问题可以重新表述为控制参数的识别问题[16].

图5 基于悬浮系统输入输出数据的控制器参数整定原理示意Fig.5 Schematic diagram of controller parameter tuning based on input and output data of levitation system
虚拟参考信号rˆ (t) 满足

则系统控制器的期望输出u(t) 为

由于式(5)的分子和分母中都存在参数,使得最小化问题相对于 θ 是非凸的,这大大增加了它的难度.为了使问题具有可处理性,必须确定凸优化准则[16].
现在考虑代价函数Jv为

式中:L为合适的预滤波器描述;E[·]为期望;uL和eL分别为经滤波后的控制器输出和系统跟踪误差,如式(9)、(10).

通过选择适当的预滤波器L,能够使两个代价函数(JM和JV)是等效的.根据文献[4]可知

式中:p(u) 为控制器输出数据u的功率谱密度.
考虑选用如下控制器:
式中: β 为控制器参数向量的系数矩阵.
因此,JV变为


参数整定算法1步骤:
步骤1根据闭环系统的输入输出数据对(u0(t),z0(t))和期望参考模型M计算虚拟参考信号以及相应的跟踪误差;
步骤2计算预滤波器并将其应用于u(t)和z(t)以获得滤波信号uL(t) 和zL(t) ;
步骤3计算使代价函数最小化的最佳参数向量.
2.2 基于估计闭环响应数据驱动的控制器参数整定
上述悬浮系统控制器参数整定算法1需要选择合适的参考模型,参考模型的选择将影响到参数整定的结果.本节提出了一种改进的利用估计闭环响应数据驱动的控制器参数整定方法.所提出的方法通过引入虚拟信号来估计非最小相位系统或不稳定系统的闭环响应[18].
考虑输入数据序列为

估计输出间隙数据序列为

输出间隙数据序列为

式中:G为系统脉冲响应;u中各项是相互线性无关的,即满足u=Uα , α 为系数矩阵,U为单次调试控制器输出数据矩阵, α =[α0α1···αN-1]T, α ∈RN,U=[u0u1···uN-1],U∈ RN×N.
输出间隙数据序列为z=Zα ,Z为单次调试悬浮系统输出间隙数据矩阵,

对于数据长度为N的输入输出数据序列,可以通过N次独立的实验来获取得到,不过这将花费大量的时间.为了使用单次悬浮调试实验输入输出数据估计,定义控制器输出数据向量和悬浮系统输出间隙数据向量分别为uk和zk:uk=[01×ku0(0)u0(1) ···u0(N-1-k)]T,zk=[01×kz0(0)z0(1) ···z0(N-1-k)]T.其中:u0(0)≠0 ,每一个uk都是线相互性无关的;k=0,1,2, ··· ,N-1.
通过消去 α 可以得到

故可以得到G=ZU-1.因此,脉冲响应G是可以根据无噪声情况下单次实验的输入输出数据对(uone(t),zone(t))得到的.可以通过使用一次性实验数据 (uone(t),zone(t)) 来估计系统任意输入数据序列u的输出数据序列z[18].然后使用虚拟参考信号来估计系统闭环响应.根据闭环系统的输入输出数据对(uone(t),zone(t))和r来估计系统闭环响应 (u(t),z(t)) ,引入,如式(21).

因此,对任意最小相位控制器C,数据对zone(t))能够用来描述系统的输入输出间关系,如式(22).

闭环系统输出数据序列可根据式(23)估计.

同理,闭环系统的输入数据序列可类似估计为

式中:r=[r0r1···rN-1].
参数整定算法2步骤[19]:
步骤1根据闭环系统的输入输出数据对(uone(t),zone(t))和r来估计系统闭环响应;
步骤2计算相应的跟踪误差e;
步骤3计算使代价函数最小化的最佳参数向量.
2.3 基于信号投影的磁悬浮系统数据噪声抑制
上一小节考虑的是在输入输出数据无噪声情况下的磁悬浮系统参数整定方法,然而通常情况下,磁浮列车工作在复杂的环境中,输入输出数据不可避免地会受到噪声的影响.
本节采用信号投影的方法实现磁悬浮系统输入输出数据噪声的抑制.具体步骤是通过合理选择低通滤波器来设计一组无噪声数据基向量,然后将带噪声的数据投影到该组无噪声数据基向量所表示的子空间中[19].定义无噪声数据基向量为

式中:Mv为基向量的数量,需要合理选择;T和F为经合理设计的低通滤波器的传递函数,其截止频率根据输出数据的频谱分析以及系统的控制带宽得到[20];k=0,···,N-1,i=1,2,···,Mv.
带噪声的数据和投影基向量为

式中:zk0为单次采样的带噪声的间隙数据.
由投影基向量构成的无噪声数据为

式中:zkp为单次采样的去噪声的间隙数据.
结合式(21),可得到改进的rˆ (t) 为

3 悬浮系统仿真与实验分析
PID控制算法在商业运营的长沙和北京中低速磁浮列车中已经得到了很好的应用,以磁浮列车单点悬浮系统为研究对象,为保证悬浮系统稳定工作在稳定时间间隙z0处,本节采用PID控制算法来实现悬浮系统控制器的设计.设计得到单点悬浮系统控制律为

式中:kp= -7 000,为比例系数;kd= -100,为微分系数;ki= -5 000 为积分系数.
得到参数整定前基于PID控制的单点悬浮系统闭环响应仿真曲线,如图6所示.
图6 单点悬浮系统输入数据曲线Fig.6 Input data curve of single-point suspension system
则基于数据驱动的悬浮控制器参数整定后的单点悬浮系统闭环响应仿真曲线如图7所示.

图7 悬浮控制器参数整定后单点悬浮系统闭环响应仿真曲线Fig.7 Simulation curves of closed-loop response of single-point levitation system before and after levitation controller parameter tuning
由图7可知:此时的单点悬浮系统经过PID控制器的闭环反馈控制以后虽然能够达到稳定,但是系统的悬浮控制性能并不好.
在此基础上,为了进一步整定控制器参数,首先收集单点悬浮系统的单次悬浮实验的输入输出数据,然后采用本文所提出的基于数据驱动的控制器参数整定方法,整定得到单点悬浮系统的控制律为

同时,结合该单点悬浮系统的单次悬浮实验的输入输出数据,分析研究采用基于虚拟参考反馈的悬浮系统控制器参数整定方法的整定效果,根据单点悬浮系统仿真实验,得到如图8的考虑不同参考模型的虚拟参考反馈悬浮控制器参数整定后的单点悬浮系统闭环响应仿真曲线.
由图8可知:基于虚拟参考反馈的悬浮系统控制器参数整定方法的整定效果比较依赖于参考模型的选取,而本文所提出的基于数据驱动的悬浮系统控制器参数整定方法则不依赖于参考模型.

图8 单点悬浮系统闭环响应仿真曲线Fig.8 Simulation curves of closed-loop response of single point levitation system
此外,根据图7、8的仿真结果,计算得到悬浮控制器参数整定前、后系统输出的悬浮间隙数据的积分平方误差(ISE)和积分绝对误差(IAE), 如表1所示.
根据表1和图7、8可知:经过控制器参数整定后,悬浮系统的悬浮控制性能提升,仿真实验结果验证了本文所提出方法的有效性.

表1 悬浮控制性能指标Tab.1 Levitation control performance indexes
为了进一步进行现场实验验证,本文在单铁磁悬浮系统悬浮控制实验平台上进行了单点悬浮实验,如图9所示.该单铁磁悬浮系统等效质量m=6.9 kg,稳定悬浮时zs=4.0 mm,is=9.5 A,A=13.5 cm2,N=300 匝,R=4.8 Ω.

图9 单铁磁悬浮系统悬浮控制实验装置Fig.9 Experimental device for levitation control of single-iron magnetic levitation system
完全结合磁浮列车悬浮系统的现场调试工作流程,通过反复调节悬浮控制板PID控制器参数来进行悬浮实验.所不同的是,结合本文基于数据驱动的控制器参数调整方法,现场调试人员无需经过漫长的PID参数调试,直到悬浮系统达到优异控制性能时才结束,调试人员只需将悬浮系统调试到稳定悬浮即可.
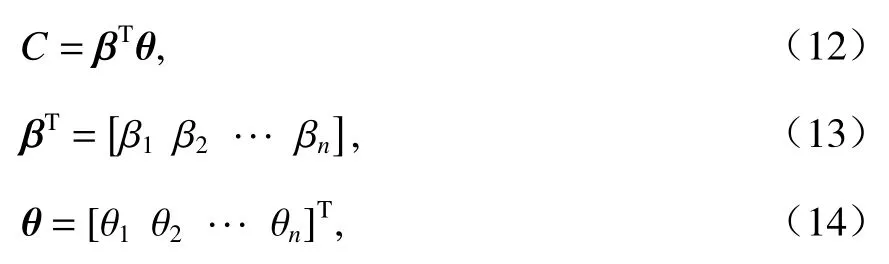
结合本文所提出的基于数据驱动的磁浮列车悬浮系统控制器参数整定方法,当悬浮系统调试稳定时(如图10所示), 收集此刻单次调试的悬浮系统输入输出数据序列,用于后续控制器参数整定.
由图10可知:测量得到的悬浮系统间隙输出数据是带有噪声的.因此,首先采用上节提出的基于信号投影的磁悬浮系统数据噪声抑制方法来实现对系统输出数据的噪声抑制.设计用于信号投影的低通滤波器T和F分别为


图10 基于PID的单点悬浮系统闭环反馈控制响应实验曲线Fig.10 Experimental response curves of closed loop feedback control of single-point levitation system based on PID
再根据式(29)可以得到经噪声抑制处理后的单点悬浮系统间隙输出数据,如图11所示.经噪声抑制处理前、后的带噪声的悬浮间隙数据的方差分别为 4.90×10-4和 2.25×10-4,噪声水平下降了 54.1%.

图11 经噪声抑制处理后的单点悬浮系统闭环反馈控制响应实验曲线Fig.11 Experimental response curves of closed-loop feedback control of single-point levitation system after noise suppression
根据经噪声抑制处理后的单点悬浮系统闭环反馈控制响应间隙输出数据,采用算法2可以计算得到整定后的控制律为

最后,在单铁磁悬浮系统悬浮控制实验平台上采用该控制器进行悬浮实验,得到悬浮控制器参数整定前、后的单点悬浮系统闭环响应实验曲线,如图12所示.系统阶跃响应的超调量由参数整定前的0.50 mm降低到参数整定后的0.14 mm,降低72.0%.悬浮控制器参数整定前、后单点悬浮系统闭环响应实验的悬浮控制性能指标如表2所示.
由表2和图12可知:控制器参数经快速整定好后的悬浮系统,相对于初始条件下仅仅只是粗调好的PID反馈控制系统,其阶跃响应具有更小的超调以及更高的控制精度,参数整定后的ISE下降79.8%,IAE下降54.5%,说明本文所提出的基于数据驱动的磁浮列车悬浮系统参数整定方法能够满足工程实际中对于磁浮列车控制器参数的快速整定的需求,并且具有较好的控制性能.现场实验结果验证了本文所提出的磁浮列车悬浮系统参数整定方法的有效性.

图12 悬浮控制器参数整定前、后单点悬浮系统闭环响应实验曲线Fig.12 Experimental curves of closed-loop response of single-point levitation system before and after parameter tuning of levitation controller

表2 参数整定前、后单点悬浮系统的悬浮控制性能指标Tab.2 Levitation control performance indexes of single-point levitation system before and after parameter tuning
4 结 论
本文针对悬浮系统的开环不稳定性和复杂非线性会给控制器参数整定带来较大困难的问题,提出了一种基于数据驱动的磁浮列车悬浮系统控制器参数快速整定方法,无需悬浮系统的精确模型,只根据单次悬浮调试实验的输入输出数据.并且针对数据噪声的问题,应用基于信号投影的噪声抑制方法,将带噪声数据的方差降低了54.1%.最后通过单铁悬浮实验,验证了基于数据驱动的参数整定方法能够快速地整定好悬浮系统控制器参数,经参数整定后的系统相对于初始条件下只粗调好的PID反馈控制系统的阶跃响应超调量下降72.0%,ISE下降79.8%,IAE下降54.5%.