一种用于高频电刀的阻抗反馈控制系统的设计
2022-06-18徐富强郑小溪
徐富强,王 威,郑小溪
(中部战区总医院医学工程科,武汉 430070)
0 引言
高频电刀是现代医学手术的重要设备,它利用高密度的高频电流对局部生物组织的集中热效应使组织汽化或爆裂,从而达到凝固或切割的目的,能够缩短手术时间和减少术中出血[1]。传统的高频电刀一般不具备功率控制功能,无法根据组织阻抗变化控制输出功率,手术中高频电刀的功率一般由医生根据经验设定,如果设定不合理,往往会导致一些并发症,如严重出血、穿孔等[2]。
与传统高频电刀不同,智能高频电刀可以通过测量手术部位的组织阻抗控制功率的输出,保护组织不被烧伤,以达到良好的手术效果[3]。其控制原理是利用反馈回路检测手术刀头接触到组织的电阻或电压、电流变化,然后将其送入微控制器进行处理,从而控制功率输出[4]。
目前,国际高端电外科设备已实现自动电切和电凝功能,可以有效减少手术过程中出现焦痂和结扎力度欠佳的现象[5]。而国产的电外科设备还处在相对低端的水平上,仅适用于传统的开放式手术,智能化程度不高[5-7]。本设计通过对传统的高频电刀Olympus PSD-30(基本频率为350 kHz,最高开路输出电压为900 V,输出功率范围为2~50 W)的脚踏开关组件进行改装,设计阻抗反馈控制系统,通过测量手术部位组织阻抗控制高频电刀的工作状态,达到控制高频电刀输出功率的目的。
1 系统设计
本系统由改装的脚踏开关、测量单元和控制单元组成。其中测量单元用于测量和计算阻抗值,并确定高频电刀何时中断。控制单元用于协调阻抗的安全测量以及控制高频电刀的工作状态。通过这3 个部分的协同工作,可以完成阻抗值的测量和高频电刀输出功率的控制。
1.1 改装的脚踏开关
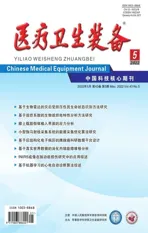
脚踏开关的改装过程如下:首先,切断连接电凝(电切)开关的导线,如图1(a)所示;然后,将电凝(电切)继电器接入导线两端;最后,将连接电凝(电切)开关端的导线与单片机相连作为单片机的一个输入,如图1(b)所示。当脚踏开关未踩下时,单片机控制电凝(电切)继电器,使其处于断开状态,高频电刀输出功率为0 W。当脚踏开关踩下时,有5 V 信号输入单片机,指示电凝(电切)开关被按下,单片机根据测量单元测得的阻抗大小控制电凝(电切)继电器的状态,从而实现对高频电刀输出功率的控制。
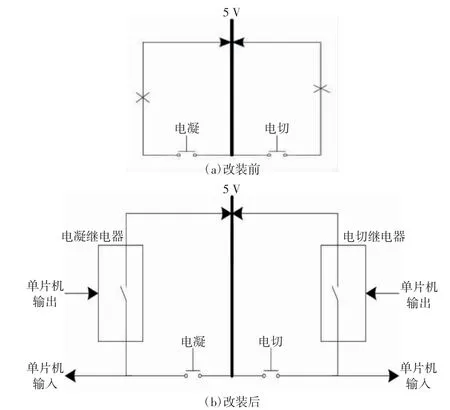
图1 脚踏开关改装前后电路原理图
1.2 测量单元
测量单元主要由电源部分、数据采集部分和数据处理部分组成,电路原理图如图2 所示。测量单元主要完成对被测器件阻抗的测量和比较。为了缩短测量时间,采用单频生物阻抗测量法在50 kHz 频率下进行测量[8]。测量的基本原理是将50 kHz 1 Vpp 的正弦波作为参考信号输入电流泵进行处理后,输出频率为50 kHz、有效值(root mean square,RMS)为200 μA的恒定电流,该电流通过电极注入被测器件,然后采集电极两端的电压,根据欧姆定律即可计算出被测器件的阻抗。
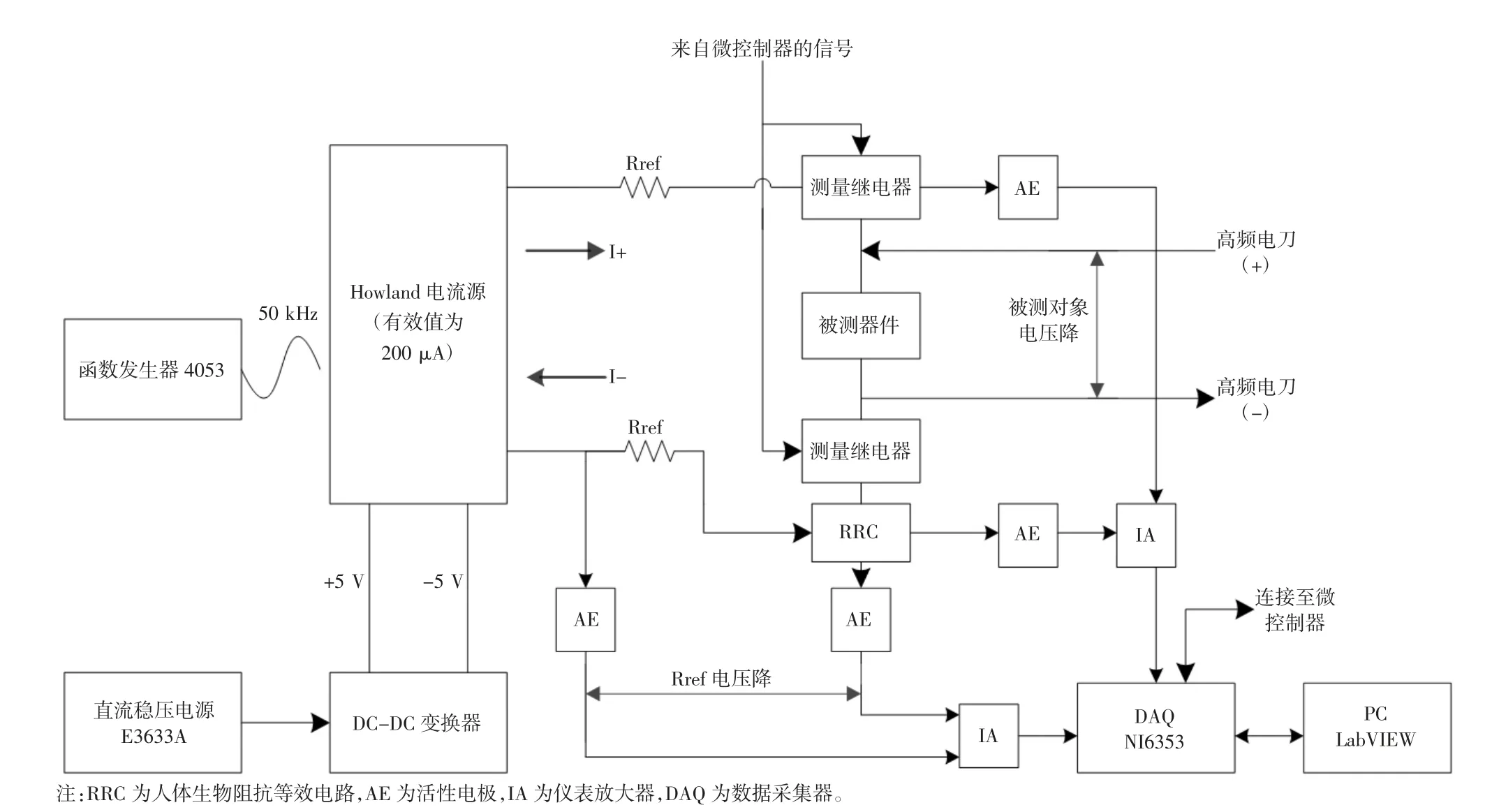
图2 测量单元电路原理图
1.2.1 电源部分
电源部分包括直流稳压电源、DC-DC 变换器、函数发生器和Howland 电流源[9]。直流稳压电源E3633A(输出电压范围为9~36 V,输出电流范围为±50~±1 000 mA)为DC-DC 变换器提供输入电压。DC-DC 变换器将E3633A 输入的电压进行变换后为Howland 电流泵、继电器、活性电极(active electrode,AE)[10]、仪表放大器(instrumentation amplififier,IA)等器件提供相应的电源。函数发生器4053 具有双通道,带宽为10 MHz,可用于产生各种高精度的调制波形。Howland 电流泵是一个压控电流源,可以为测量负载提供稳定的电流输入,其输出电流不受负载变化的影响,可保证被测器件的测量精度。
1.2.2 数据采集部分
数据采集部分主要包括AE、IA 和数据采集器(data acquisition,DAQ)。AE(如图3 所示)用于稳定被测器件的电压信号。IA 用于对AE 输出的信号进行放大,本设计采用增益为2 的IA。DAQ 主要用于采集参考电压信号和被测器件的电压信号,其采样频率设置为251 kHz,符合奈奎斯特采样频率,可以确保获得完整的波形。
图3 AE 电路图
1.2.3 数据处理部分
数据处理部分主要由计算机中的LabVIEW 软件完成。LabVIEW 软件采集DAQ 的输出信号,对阻抗值进行计算并与设定的阻抗阈值进行比较,判断是否达到阻抗阈值,然后发送信号给DAQ 通知微控制器。为了减小测量误差,测量单元中采用与被测器件阻抗相当的参考电阻。
1.3 控制单元
控制单元电路原理图如图4 所示。Arduino UNO微控制器通过3 个输入和5 个输出实现对测量继电器(固态继电器CPC1988[11])和电凝(电切)继电器(簧片继电器9002[12])通断的同步协调,完成阻抗测量和对高频电刀输出功率的控制。
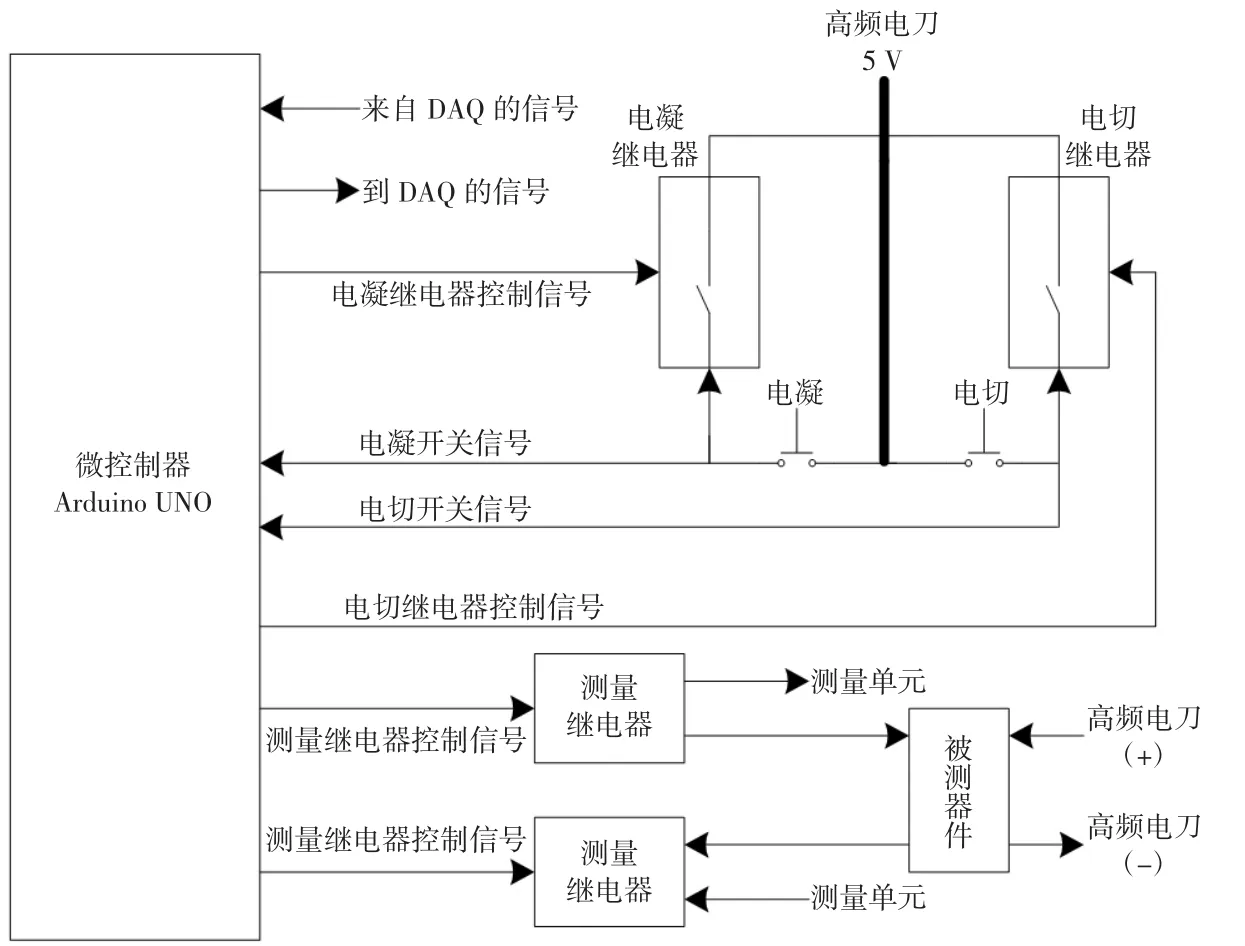
图4 控制单元电路原理图
微控制器的3 个输入分别是电凝、电切信号输入和DAQ 信号输入,其中DAQ 输入连接至单片机的中断引脚。单片机通过读取电凝、电切开关状态判断脚踏开关是否被踩下,通过读取DAQ 信号确定电凝(电切)继电器是否可以闭合。
单片机的5 个输出分别是2 个测量继电器控制信号、电凝开关信号、电切开关信号和发送至DAQ的信号。单片机控制2 个测量继电器和电凝(电切)继电器始终处于相反的工作状态。当电凝(电切)继电器闭合时,高频电刀输出特定的功率,此时测量继电器断开以隔离高频电刀防止电流进入测量单元对其造成损坏。当电凝(电切)继电器断开时,测量继电器闭合,同时单片机发送信号至DAQ,通知LabVIEW 可以对阻抗进行测量。
1.4 系统工作过程
阻抗反馈控制系统工作原理图如图5 所示。当踩下脚踏开关时,电凝(电切)开关将从高频电刀来的5 V 电压引入单片机,指示电凝或电切开关闭合,单片机读取此信号控制电凝(电切)继电器吸合,高频电刀输出特定的功率。此时,测量继电器处于断开状态,将测量单元与高频电刀隔离。若单片机监测到脚踏开关仍处于闭合状态,则断开电凝(电切)继电器,闭合测量继电器,将测量单元连接到被测器件,微控制器同时发送一个信号到DAQ 通知LabVIEW 测量被测器件的阻抗并与阈值进行比较。若未达到阈值,LabVIEW 停止测量,同时通过DAQ 发送信号给单片机,使测量继电器断开,电凝(电切)继电器闭合,高频电刀继续为被测器件提供交流电。以上过程一直重复,直到测量到的阻抗达到阈值,LabVIEW通过DAQ 向单片机发送信号,中断高频电刀的功率输出,避免被测器件从高频电刀接收更多的交流电。
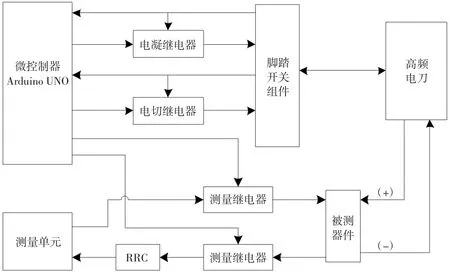
图5 阻抗反馈控制系统工作原理图
1.5 系统时序设计
控制单元软件在Arduino UNO 开发环境下用C++语言编写。在编写控制系统软件时,需要考虑以下事项:(1)在继电器的闭合和断开之间增加25 ms的延迟,将测量单元和高频电刀隔离,避免因电流流入测量单元而导致测量单元损坏。根据继电器数据表[11-12],测量继电器和电凝(电切)继电器的最大切换时间为20 ms,可以选择25 ms 作为安全延迟时间,以防在验证阶段出现错误。(2)考虑从测量继电器闭合至信号发送到DAQ 开始测量之间的25 ms 延迟,解决在继电器切换过程中,当继电器未完全闭合时,初始测量阻抗值非常高的问题。(3)高频电刀最短开启时间为75 ms。综合考虑以上因素,完成被测器件阻抗测量、高频电刀开启和停止再到下一次测量需要0.184 s。这意味着高频电刀每秒触发5.4 次,总接通时间为0.405 s,系统的占空比约为41%。完整的时序图如图6 所示。

图6 控制单元工作时序图
2 系统验证
生物阻抗取决于一定频率下细胞外液(extracellular water,ECW)和细胞内液(intracellular water,ICW)电阻率的加权总和[13]。人体生物阻抗模型可以用RRC 三元件电路等效,其中ICW 的阻抗用Ri表示,ECW 的阻抗用Re表示,细胞膜电容用Cm表示,如图7 所示。
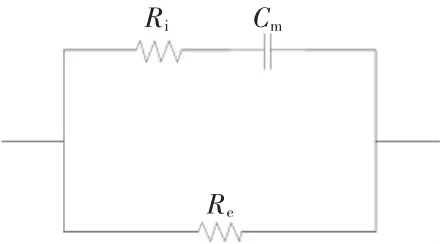
图7 RRC 电路图
根据Cole-Cole 理论[14],对于上述生物阻抗三元件模型,有如下结论:
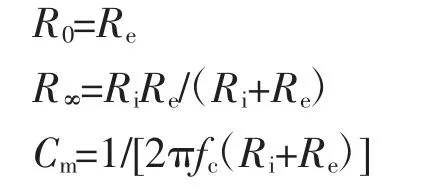
式中,R0为频率很低或为0 时RRC 电路的阻抗;R∞为频率很高时人体生物组织等效电路的阻抗;fc为RRC 电路的特征频率。以结肠息肉切除为例,在结肠息肉切除时,高频电刀的负极板连接到大腿位置,正极处在结肠位置,为了减小测量误差,在系统验证前,首先要确定大腿到结肠对应的躯干位置的RRC 电路的阻抗。具体方法是采用人体成分分析仪ImpediMed SFB7[5],将其电极的一端连接到大腿上负极板对应的位置,另一端连接到躯干上结肠对应的位置,测出R0和R∞,通过多次测量求R0和R∞的平均值,可确定Cole-Cole 频谱阻抗图,从阻抗图上可以得到Ri、Re和50 kHz 频率下的Cm的值,这样就确定了结肠对应躯干位置到负极板的RRC 参数。由于本系统在50 kHz 频率下电流稳定不变,所以RRC的参数值不变,在RRC 电路中串联一个电位器,通过旋转电位器可以模拟在高频电刀工作过程中结肠部位阻抗的变化。
采用人体成分分析仪测量出躯干前部到大腿的3 次测量值的平均值分别为R0=62.06 Ω、R∞=25.35 Ω。而躯干后侧至大腿的3 次测量值的平均值分别为R0=65.50 Ω、R∞=25.28 Ω。然后将这2 个位置的R0和R∞值取平均值,得到R0的平均值为63.78 Ω、R∞的平均值为25.32 Ω。由此可以确定Cole-Cole 频谱阻抗轨迹图,根据该轨迹图可确定50 kHz 时,Re=64 Ω、Ri=13 Ω、Cm=1 nF。
通过以上测量可以确定人体在50 kHz 频率下的Re、Ri和Cm。选用与以上测量值对应的电阻、电容组成的RRC 电路模拟大腿到结肠对应的躯干位置的阻抗,用电位器模拟结肠部位的阻抗。将被测器件阻抗阈值分别设置为500、750 和1 000 Ω,旋转电位器对阻抗反馈控制系统进行多次测试,结果表明,参考电阻的阻抗保持在(475±5)Ω 之内时,来自高频电刀的交流电可以在以上阻抗阈值处都降为0 A。图8为1 000 Ω 阈值验证时的功率阻抗曲线,踩下电凝开关并转动电位器将阻抗从68 Ω 上调到1 000 Ω(阈值)时,高频电刀被控制单元自动中断,功率下降到0 W。试验结果表明,本系统可以满足设计要求。
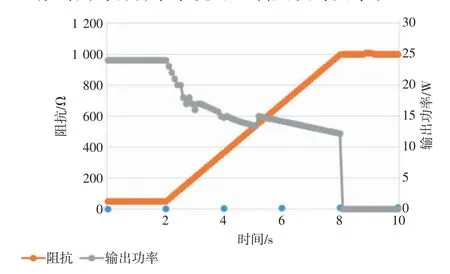
图8 1 000 Ω 阈值验证时的功率阻抗曲线
3 结语
本研究通过对传统高频电刀的脚踏开关进行改装,加入测量单元与控制单元,实现了对高频电刀输出功率的自动控制。概念验证结果表明,本系统能够准确测量和监测被测器件的阻抗(精度为±5 Ω),且在阈值处可以有效中断高频电刀的输出。由于本设计是在不改变原有高频电刀内部结构的基础上进行改进的,所以可以方便、安全地实现对传统高频电刀的升级,节约设备更新换代带来的高昂成本。本研究仅进行了概念验证,下一步将通过动物结肠样本试验来确定合适的阻抗阈值,为进一步的临床试验作准备。