Investigations on the Quasi-static Stability Behavior of an Innovative Subsurface Tension Leg Platform in Ultra-Deep Water(Part II)
2022-06-18-,-,,
-,-,,
(School of Naval Architecture and Ocean Engineering,Dalian University of Technology,Dalian 116024,China)
Abstract: This paper focuses on an innovative technology of the Subsurface Tension Leg Platform(STLP), which utilizes the shallow-water rated well completion equipment and technology for the de⁃velopment of large oil and gas fields in ultra-deep waters.A design and assessment analysis model re⁃garding the quasi-static stability of the STLP was established to provide a favorable technical perfor⁃mance and a high level of safety. The quasi-static stability of the STLP was achieved by positioning the artificial seabed below Mean Water Level (MWL)to minimize direct wave loading.Firstly,the ana⁃lytical theory and the numerical modelling methodology for the quasi-static stability study of the STLP were presented. After that, the mooring pattern effects on the STLP stability were investigated system⁃atically. Then, the damage stability of the STLP due to tether failures under the extreme storm condi⁃tions was studied.The results demonstrate that the STLP is a feasible and competitive offshore field de⁃velopment solution to petroleum production in water depths of more than 3000 m.
Key words:subsurface tension leg platform;artificial seabed;mooring pattern;stability;ultra-deep water
0 Introduction
In the offshore petroleum industry,dry tree units and subsea tree systems are utilized currently for the offshore field development in deep and ultra-deep waters[1]. However, it is found that both dry tree and subsea tree development concepts have their own limitations[2-4].In this scenario,a new alternative offshore field development solution (termed as STLP) is proposed[5-6]based on the artifi⁃cial seabed principle. A tethered subsurface platform, which refers to the artificial seabed, acts as the real seabed function, as is shown in Fig.1(a). The design philosophy including the configura⁃tions, working principle and specific advantages of the STLP has been systematically introduced in Ref.[7].The key design criteria of the STLP are proposed and summarized as follows.
(1) The buoyancy of the artificial seabed should meet the criterion of balancing the maximum vertical loads generated by the self-weight of the artificial seabed, reserve buoyancy, mooring sys⁃tem,rigid risers,subsurface well completion equipment and flexible jumpers.
(2) The available deck space of the artificial seabed should meet the criterion of minimum space requirement for installation, production and maintenance of subsurface well completion equipment.
(3)The structural form and the mooring pattern of the artificial seabed should meet the criteri⁃on of minimum motion response requirement for the STLP.
(4) The mooring system and the subsurface well system should meet the decoupling criterion so as to avoid the overall failure of the STLP.
In the latest research[8-9],it is found that the previous design scheme of the STLP,which was in⁃troduced in Ref.[7],did not meet the last key design criterion,i.e.the strong coupling among the ar⁃tificial seabed,rigid risers and mooring system.This indicates that the failure of the mooring system may induce the subsequent failures of the subsurface well system, and vice versa. Given this, the structure form of the artificial seabed is improved,as illustrated in Fig.1(b).Compared with the pre⁃vious design scheme,the Inner Buoyancy Can(IBC)is developed to support the subsurface well sys⁃tem independently and hence decouple the mooring system.

Fig.1 STLP of different design schemes
The STLP primarily includes four parts: the moored artificial seabed, rigid risers, subsurface well completion equipment and flexible jumpers. The artificial seabed, the top of which is located 200 m below MWL, consists of an outer platform and four IBCs. The outer platform is a single col⁃umn with four cylindrical channels. The IBC is a slender column placed inside the outer platform.With the improved structure form of the artificial seabed, only horizontal forces and motions are transmitted from the outer platform to the IBCs.More details regarding the artificial seabed are pre⁃sented in Tab.1.
The four vertically loaded mooring lines of the STLP mooring system connect suction pile foun⁃dations and the outer platform. The mooring line consists of three parts, i.e. chain-tether-chain.Tab.2 presents the detailed mooring system parameters.
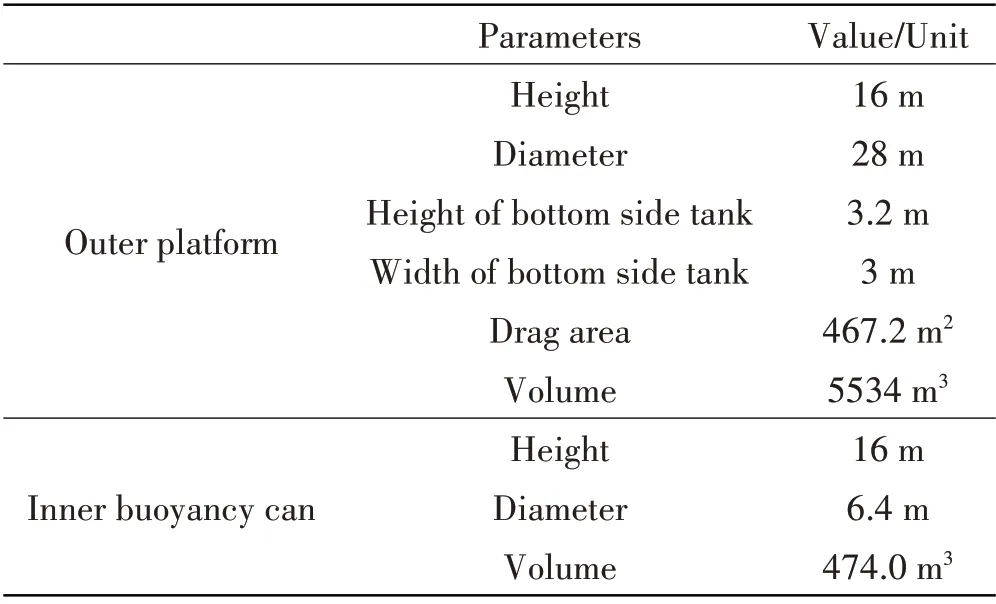
Tab.1 Properties of the artificial seabed

Tab.2 Mooring system parameters
The author addressed in Ref.[7] the mechanical behavior of the STLP at a depth of 3000 m with respect to rigid riser’s strength,buckling as well as VIV fatigue performance.Chapter 2 of this paper herein addresses the quasi-static stability behavior of the STLP systematically, for achieving an optimal design of mooring patterns at a depth of 3000 m. With the artificial seabed located 200 m below MWL, the dynamic surge responses of the STLP induced by wave loading can be mini⁃mized, thus the quasi-static stability of the STLP is achieved. The contents are structured as fol⁃lows:Chapter 1 presents the analytical theory and the numerical modelling methodology for the qua⁃si-static stability study of the STLP, Chapter 2 investigates the mooring patterns effects on the STLP stability while Chapter 3 studies the damage stability of the STLP due to tether failures under the extreme storm conditions.Conclusions are made in Chapter 4.
1 Theory and numerical modelling
1.1 Analytical theory for the quasi-static behavior of the STLP

whereFfis the fluid force, Δ is the mass of fluid displaced by the body,afis the fluid acceleration relative to earth,Cais the added mass coefficient for the body,aris the fluid acceleration relative to the body,ρis the density of water,Vris the fluid velocity relative to the body,Cdis the drag coeffi⁃cient for the body,andAis the drag area.
1.2 Numerical modelling of the STLP
The three-dimensional nonlinear time domain analysis program OrcaFlex[10]is applied to carry out the numerical analysis study in this paper. The finite element model of the STLP is shown in Fig.2. The artificial seabed is modeled as the 6-degree-of-freedom buoy.All lines including rigid⁃risers, tethers and chains are modeled by the line unit based on the lumped-mass model. The line contact model is used to simulate the interaction between the keel joint and the IBC. In addition,the fixed mode of tethers at the end allows free rotation while the connection mode of rigid risers at the end is rigidly fixed.

Fig.2 Finite element model of the STLP
1.3 Environment parameters
The stability performance of the STLP under the extreme storm conditions[5](Wave:Hs=15 m,Tz=10.4 s) with a return period of 100 years in the South China Sea (SCS) is studied. Specific current data are shown in Tab.3. It is assumed that the directions of wave and current are the same in con⁃sideration of the most severe case.

Tab.3 Current data with a return period of 100 years
2 Mooring pattern effects on the STLP stability
In order to investigate the mooring pattern effects on the STLP stability[11-12],the effects of teth⁃er numbers are systematically studied in this chapter. It should be noted that in order to ascertain the effect of the mooring system on the stability behavior of the STLP, sensitivity studies on the fol⁃lowing parameters including the top inclined angle (θ), pretension (T), water depth (H) and current velocity(v)have been performed by Zhen and Huang(2017)[13].
In this study, mooring systems with 3, 4, 6 and 8 tethers are established respectively to study the effects of tether numbers on the artificial seabed stability, among which 6 tethers are uniformly distributed into three groups while 8 tethers are uniformly distributed into four groups. Fig.3 pres⁃ents the sketch of different mooring patterns, including tether serial numbers and the angles be⁃tween adjacent tether groups.The coordinates used in this paper are defined as shown in the figure,where the direction ofXaxis is the same as those of wave and current.

Fig.3 Different mooring patterns
Fig.4 presents the mooring pattern effects on the dynamic surge responses of the artificial sea⁃bed. Furthermore, the results of the artificial seabed’s surge response are summarized in Tab.4.The following conclusions can be reached from the calculation results.
(1)The horizontal offset of the artificial seabed results from the current loads while the dynam⁃ic surge responses of the artificial seabed are caused by surface wave loads. For a floating produc⁃tion platform, the horizontal offset is required not to exceed 5% of the water depth under operating conditions and 10% of the water depth under extreme conditions. It can be found from Fig.4 and Tab.4 that the maximum horizontal offsets of the artificial seabed (1.33% ~2.20%WD) fully meet the requirement. There is no specific requirement for the surge amplitudes of a floating production platform, however, the surge amplitudes of the artificial seabed (less than 0.004%WD) are so small in comparison with the maximum horizontal offsets. This is mainly due to the location of the artifi⁃cial seabed away from the wave zone and current has the main influence on the STLP stability.
(2)The surge responses of the artificial seabed can be improved to a large extent when the num⁃ber of tethers is increased.

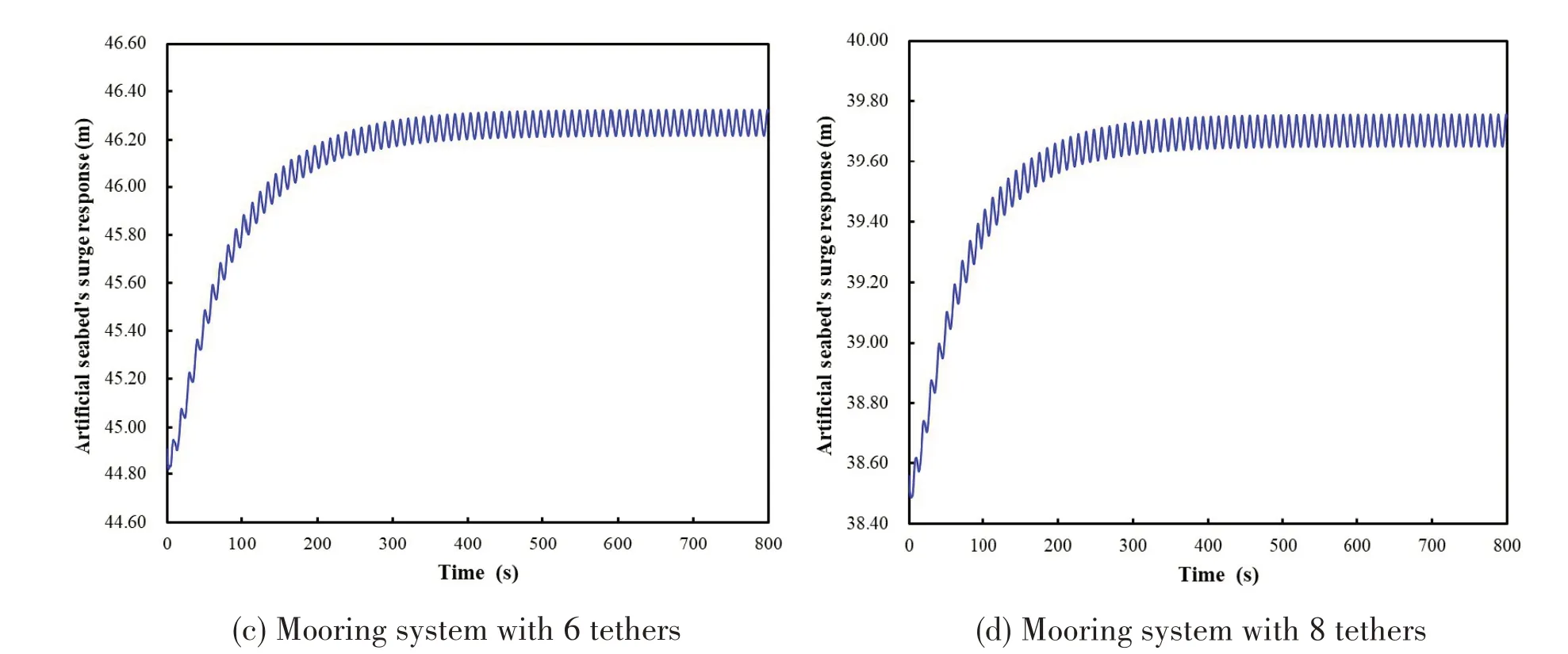
Fig.4 Surge response of the artificial seabed with different mooring systems

Tab.4 Results of artificial seabed’s surge response
3 Tether failure effects on the STLP stability
Potential causes of mooring failures can be divided into the following three categories[14-16]:
(1) Design/fabrication. A latent defect resulting from the design, fabrication, or installation,such as incorrect environmental conditions,incorrect geotechnical data,fabrication error,etc.;
(2)Degradation.Deterioration of the system,such as the wear,corrosion,fatigue,etc.;
(3) Individual event. Occurrence of an event-based failure, such as installation damage, dam⁃age by a dropped object,design conditions exceeded,etc..
In case of a tether failure, the stability behavior of the STLP will be seriously ruined. This could further result in the breakdown of the whole STLP,possibly causing damage and hydrocarbon release. Once the failure of one or more tethers occurs, tensions in the rest tethers will be redistrib⁃uted and a new balance will be reached.Tabs.5-8 present the tether failure effects on the STLP sta⁃bility with different mooring patterns.
Tab.5 Motions of the artificial seabed with 3 tethers due to tether failure

Tab.6 Motions of the artificial seabed with 4 tethers due to tether failure

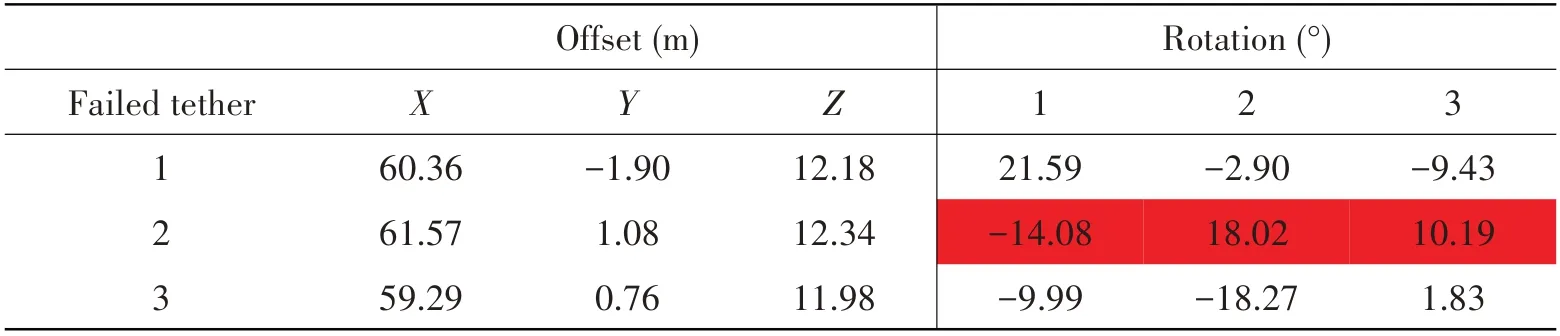
Tab.7 Motions of the artificial seabed with 6 tethers due to tether failure
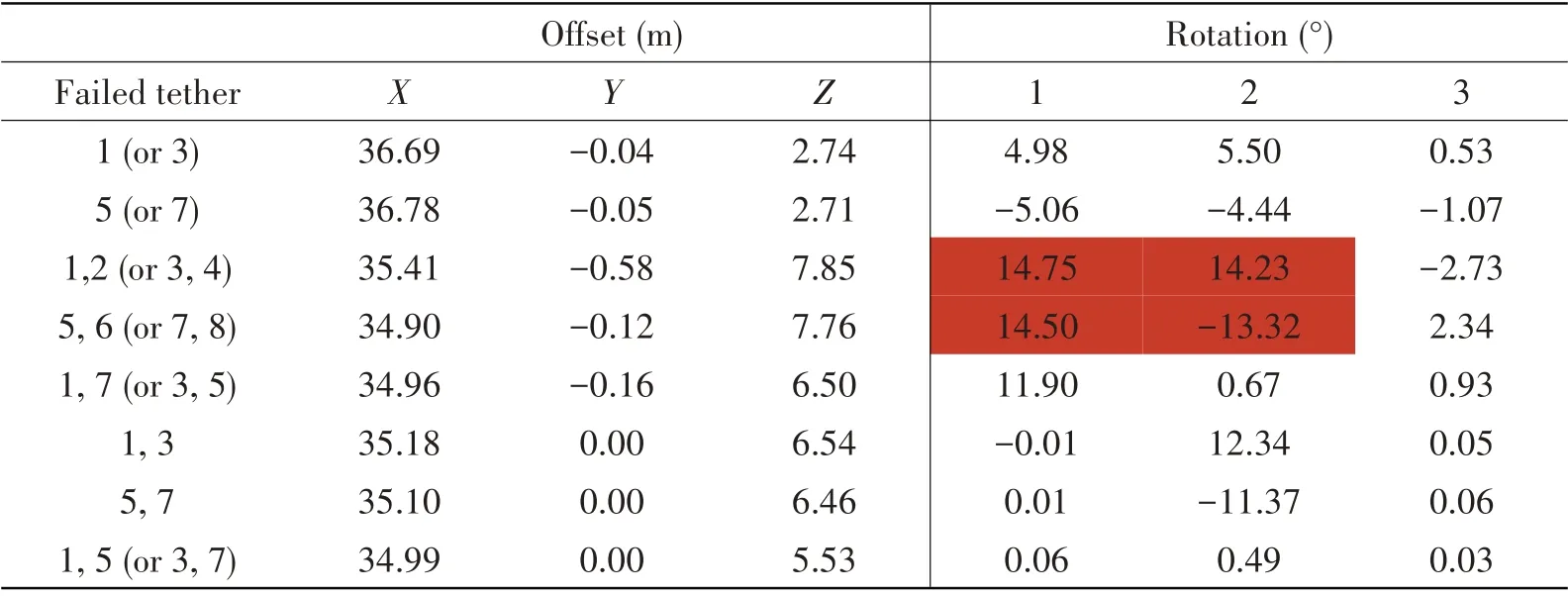
Tab.8 Motions of the artificial seabed with 8 tethers due to tether failure
The following conclusions can be obtained from the calculation results:
(1) The maximum offsets of the artificial seabed in DirectionXdecrease if the failure of one or more tethers occurs. This is mainly because the artificial seabed moves upward and the tension in the rest tethers increases greatly,which limits the horizontal offset of the artificial seabed.
(2) Compared with the mooring pattern with 3 tethers, the mooring pattern with 4 tethers can improve the STLP stability to some extent. Compared with the mooring pattern with 3 or 4 tethers,the mooring pattern with 6 or 8 tethers can further improve the STLP stability to some extent in case one tether fails.If one tether fails,the artificial seabed will not be inclined heavily,which is of great importance for the safety of the STLP. It can be seen from Tabs.7-8 that the most dangerous situa⁃tion occurs when two tethers in one group fail at the same time. It can be noted that with respect to the mooring patterns with 8 tethers, the artificial seabed can still keep its stability if two tethers in the opposite position fail at the same time.
4 Conclusions
The global behavior of the STLP at a depth of 3000 m is investigated in detail in this paper,and the quasi-static stability behavior of the STLP is addressed systematically for achieving an opti⁃mal design of mooring patterns at a depth of 3000 m.The main conclusions are drawn as follows:
The surge amplitudes of the artificial seabed are so small that the STLP’s quasi-static behav⁃ior can be confirmed.This requires the artificial seabed to be located away from the wave zone.
In order to ensure the excellent stability and the safety of the STLP,the mooring pattern should be taken great care of.The surge responses of the artificial seabed can be improved to a large extent when the number of tethers is increased. In consideration of the tether failure effects on the STLP stability, the mooring pattern with 6 or 8 tethers is recommended if a large tilt of the artificial sea⁃bed is unacceptable in the operational phase.
In summary, the investigations on the quasi-static stability behavior of the STLP have con⁃firmed the adaptation to harsh environment conditions. The STLP behaves almost quasi-statically and can eliminate nearly all wave-induced challenges for the conventional offshore production sys⁃tems. The obtained conclusions in this study have a wide-range applicability with regard to the de⁃sign and analysis of deep-water hybrid riser systems[17], such as Tension Leg Riser and Grouped SLOR.
杂志排行

船舶力学的其它文章
- Study on the Loads of Connectors for a RMRC Hexagon Enclosed Platform Model in Waves
- Numerical Simulation of Semisubmersible Accommodation Platform Going Alongside FPSO Under the Control of Dynamic Positioning System
- Behavior of Crude Oil Leakage from Underwater Damaged Hole of Oil Tank in Waves
- Dynamic Response of Shipbuilding Sandwich Plates with Functionally Graded Soft Core Subjected to Impulse Loading
- Dynamic Response Analysis of a New Semi-submersible Offshore Wind Turbine Based on Aerodynamic-Hydrodynamic Coupling
- Ship Local Path Planning Based on Improved Q-Learning