基于拓展计划行为理论的IDS危险骑行分析
2022-06-18许江超韩天园王显军
许江超,韩天园,曹 莹,王显军,李 彬
(1.长安大学 汽车学院, 西安 710064; 2.太平财产保险有限公司 陕西分公司, 西安 710002)
0 引言
随着“互联网+服务业”在中国的逐渐流行,O2O(online to offline)被广泛应用于零售、餐饮外卖、生鲜配送等领域,即时配送服务(instant delivery service,IDS)得到了空前的发展[1]。IDS的特点是配送任务多变、时间要求紧迫、同时服务于多个商户与消费者[2]。由于电动两轮车灵活便捷,绿色环保,成本低,能有效应对城市道路拥堵、交通限制、停车困难等状况,已成为IDS的主要载具[3]。美团、饿了么、京东、盒马鲜生等众多互联网品牌拥有庞大的电动车即时配送服务群体。截至目前,仅美团公司已拥有近400万配送骑手,而应聘成为职业骑手只需要一个简单的线上安全考核和短暂的安全培训,造成交通违章行为层出不穷,增加了城市交通事故隐患[4]。
骑手的激进行为、操作错误、骑行次任务和交通违章行为是引发交通事故的危险因素[5]。相较于自行车,电动车骑手有更高的交通违规倾向[6]。相较于行人和车辆,电动车有更高的事故易感性[7]。相较于其他道路参与者,电动车骑手有更高的受伤概率,受到的伤害会更严重[8]。此外,电动车配送骑手比普通骑手更有可能违反交通规则。一项来自上海的研究表明,电动配送车骑手的违法闯红灯率比普通电动车骑手高出约40%[9]。另一项来自西安的研究表明,送货电动车骑手的闯红灯概率和车速明显高于普通骑手[10]。因此,有必要深入分析送货电动车骑手的交通违法原因,为制定有效的对策、加强道路安全提供依据。
目前,针对电动车配送骑手的研究主要聚焦于性别、年龄、婚姻状况、工作收入、驾驶经验等个人特性,以及行为意图、态度、从众倾向等个人心理和交通环境对闯红灯概率的影响[9-11]。不可否认,此类因素对电动车配送安全具有重要的影响,但其无法解释为什么配送骑手比普通骑手更倾向危险骑行,故应充分考虑IDS的工作特性,如配送时间限制、薪资制度、工作方式。目前,国内外在交通服务安全研究方面已取得大量成果,为探究电动车配送交通安全提供了借鉴。Nguyen等[12]对越南网约摩托车骑手的调查发现,骑行时使用手机接单、联系乘客和地图导航是最主要的危险行为,应用平台对骑手违法违规行为进行惩罚对骑手的安全约束效果显著。Park等[13]发现营运车辆比普通车辆的事故率和事故严重程度更高,工作压力也是职业驾驶人危险驾驶倾向的重要原因。Havrneanu等[14]通过对出租车驾驶员的调查发现,在工作场所和客户的冲突与驾驶员危险驾驶行为成正相关性。Ansar等[15]研究发现,监管不到位导致的安全氛围不良、出租车驾驶员的工作需求是疲劳驾驶等危险行为的直接原因。
综上,应用拓展计划行为理论建立态度、主观规范、知觉行为控制、组织安全氛围、薪资期望、工作场所冲突与行为意图之间的关系假设,通过调查问卷收集IDS骑手的测量变量数据,基于结构方程模型验证变量关系,探讨配送骑手危险骑行意图的影响因素,为改善IDS交通安全状况提供参考。
1 文献综述与假设模型
1.1 IDS骑手劳动分析
IDS平台通过营造自由的工作时间和可观的收入吸引配送员加入,在技术支持下,引导骑手主动工作,并将“准时”与“快速”程度和收入直接挂钩。平台实时记录骑手的配送速度、工作时长、在线时间等数据,并基于算法培养骑手的忠诚度。配送效率高、工作时间长的骑手会得到更多的订单与奖励[16]。
在利益与非理性的团队氛围驱使下,骑手需要平衡安全风险和配送时间要求。虽然IDS骑手可以提供电动车、智能手机等部分生产资料,但IDS平台掌控了核心生产资料,即所有的订单信息。IDS对劳动技能的要求低,替代性高,配送任务的独立性使得骑手被虚拟平台分化为彼此分散的个体,丧失了与IDS平台谈判的资格,IDS平台单方面制定定价、派单和奖惩等方面的规则。相较于骑手的安全利益,平台更倾向使自己的利益最大化。因此,在骑手、顾客和平台的三方合作中,骑手处于绝对弱势[17]。
劳动组织控制系统包括指导工人工作、评价工人表现和奖惩工人等3个要素。IDS平台重新分配劳动组织控制权,由平台系统派遣、指导任务和奖惩骑手,由消费者评价骑手表现,导致骑手与平台间的雇佣关系认定困难,既不完全符合雇佣范畴,又不等同于独立合同工范畴。若骑手在配送过程中发生交通事故受到伤害,很难被认定为工伤,因此得不到补偿[18]。
1.2 计划行为理论
计划行为理论(theory of planned behavior,TPB)是一种通过态度(attitude,AT)、主观规范(subjective norm,SN)与知觉行为控制(perceptual behavioral control,PBC)3个变量预测行为意图(behavior intention,BI)的理论体系。TPB认为人类的行为受个人意志和非意志因素的综合影响[19],如图1所示。TPB对不安全交通行为的解释和预测效果已被充分证实[20-21]。同时,TPB允许根据行为个性的特殊性增加拓展变量,提高行为的预测和解释性。如Chen等[20]通过增加集体认知和娱乐感知,提高了TPB对摩托车骑手超速行为的解释能力。

图1 计划行为理论体系框图
1.3 组织安全氛围与危险行为
组织安全氛围是骑手对IDS平台看待安全的态度和管理安全的方式的主观评价。消极的安全氛围会恶化安全操纵和危险感知能力,增大交通冲突和事故的几率[15,22]。由于IDS平台与骑手弱化的雇佣关系,虚拟平台对骑手安全负有的法律责任小[18],甚至默许骑手违反交通规则以准时配送[16]。
1.4 薪资期望与危险行为
薪资期望是IDS骑手根据时间投入、劳动强度和安全风险对订单平均收益和总收益感到满意的程度。王雅坤等[4]对外卖员的调查显示,订单数量和工作收入是外卖员违反交通规则的重要意愿驱动。Park等[13]研究发现,营运车辆相比普通车辆的事故率和事故严重性更高,激进的驾驶行为虽然提高了事故风险,但更直接表现为收入的增长。骑手为完成更多订单,避免差评和罚款,会主动提高配送效率[16]而冒险违反交通规则。
1.5 工作场所冲突与危险行为
工作场所冲突为IDS骑手在配送任务中与商家、顾客、平台等对象产生矛盾而引起的个人消极情绪。心理学认为人们会实施攻击性行为以宣泄不满情绪,并从中获得快感[23]。顾客的差评或投诉会使得骑手劳无所获,由于骑手的绝对弱势,即使面对一些不合理的刁难、差评和罚款,骑手也很难申辩,导致他们更多的时候选择了妥协与忍受[17]。工作场所的矛盾与冲突容易造成消极的个人情绪,而消极的个人情绪与危险行为呈正向相关[14]。
1.6 假设模型
根据以上论述,提出以下假设:
H1:态度对骑手的危险行为意图有正向作用;
H2:主观规范对骑手的危险行为意图有负向作用;
H3:知觉行为控制对骑手的危险行为意图有正向作用;
H4:组织安全氛围对骑手的危险行为意图有正向作用;
H5:薪资期望对骑手的危险行为意图有正向作用;
H6:工作场所冲突对骑手的危险行为意图有正向作用。
2 量表设计
参考Ajzen提出的标准计划行为理论,并借鉴出租车和运营摩托车危险驾驶行为原因的相关研究经验[12-14],通过与即时配送服务电动车骑手的交流访谈后调编制查问卷。为确保调查问题的质量和有效性,采用预调查和反馈修正的问卷编制策略。在初始问卷编制完成后,邀请26名即时配送服务电动车骑手参与预调查,根据受访者的反馈情况和预调查因子分析结果,确定最终的调查问卷。
计划行为理论量表主要用于测量被测试者关于主动交通违规的态度、主观规范、知觉行为控制、组织安全氛围、工作场所冲突、薪资期望和行为意图, 量表设置如表1所示。采用Likert-5计分法,表示从1“非常不同意”至5“非常同意”,从1“从未”至5“非常频繁”。
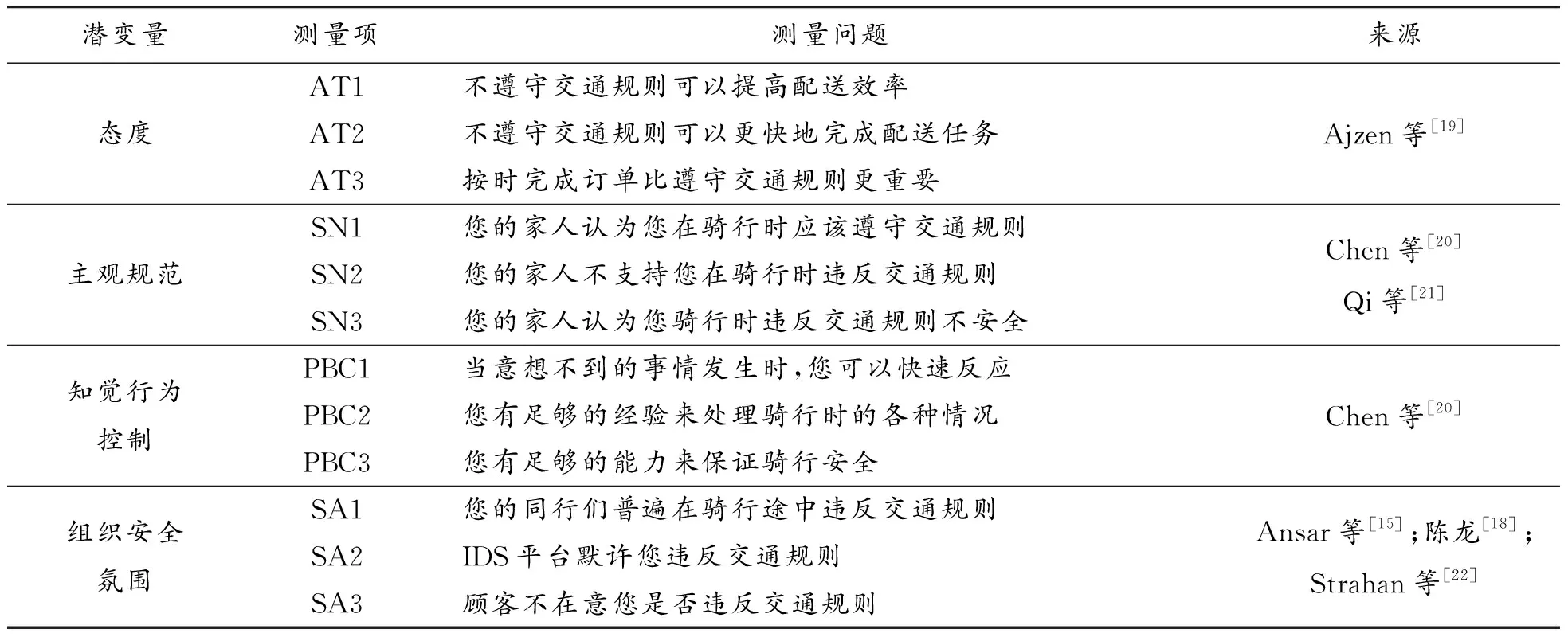
表1 量表设置

续表(表1)
采用线下和线上的问卷调查方法。为提高受访者的积极性,问卷填写完成后,所有受访者都将得到5元人民币。网络问卷通过微信群分享至配送员,每个IP地址的用户只能填写1次。最终共有318名即时配送服务电动车骑手参与调查,他们主要分布于陕西的西安、咸阳等城市,且主要来自于美团和饿了么两家外卖公司。得到36份纸质问卷和282份网络问卷。通过剔除规律选择、前后矛盾和网路填写时间不足3 min的无效问卷后,获得288份有效问卷,问卷有效率为90.6%。
3 数据分析
3.1 信度与效度检验
为确保问卷调查的可靠性和有效性,需要对问卷数据进行信度与效度检验。使用因子分析评价因子结构的有效性。KMO和巴特利特球形度检验结果显示,KMO=0.751,近似卡方值为4 166.104,显著性水平小于0.001,表明该数据适合因子分析。使用主成分分析法提取因子,使用最大方差法旋转因子,计算结果显示各因子的标准负荷大于0.7。此外,对量表结构的可靠性分析结果显示,Cronbach’s α和组合系数CR的值都大于0.7,平均方差提取量(AVE)的值大于0.5,表明潜在变量具有较好的一致性与收敛性。计算结果如表2所示。
计算各潜变量AVE的平方根值与相关系数,评价量表的区别效度如表3所示。所有潜变量AVE平方根值都大于其他潜变量两两相关系数,表明量表满足区别效度检验。

表2 信度与效度检验
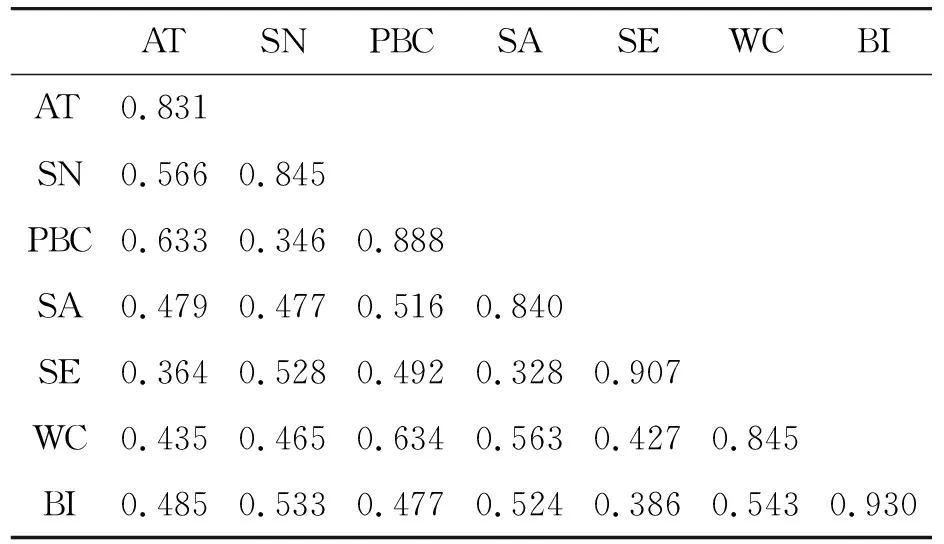
表3 区别效度
3.2 结构方程模型分析
运用AMOS 24.0结构方程拟合分析和验证假设模型,通过不断拟合修正计算最终的模型适配度指标,如表4所示。经比较可知,扩展计划行为理论模型的卡方自由度比(χ2/df)、渐近残差均方和平方根(RMSEA)、良适性适配置指数(GFI)、调整后适配度指数(AGFI)、增值适配指数(IFI)和比较适配指数(CFI)结果兼落于适配范围,适配度明显优于传统计划行为理论模型,表明考虑工作特征的危险骑行行为结构方程模型更为理想,可进行后续路径分析,结构方程模型如图2所示。
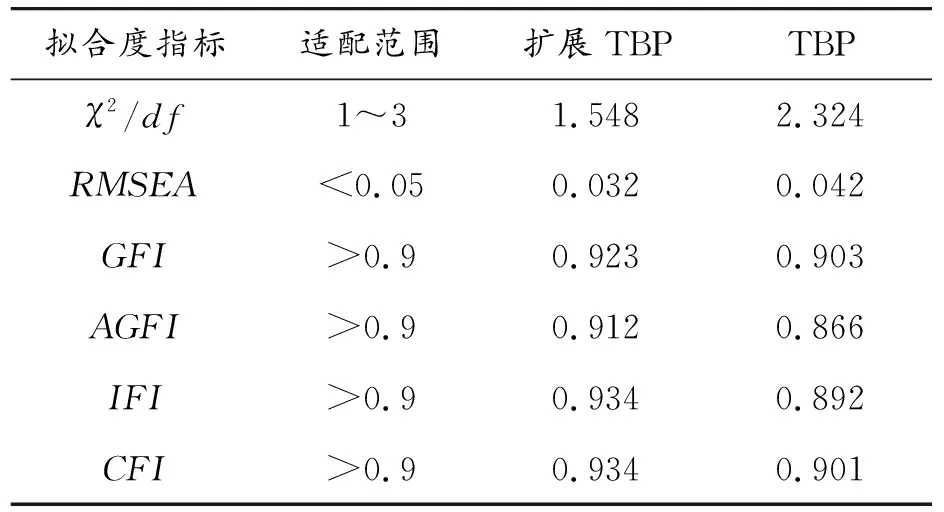
表4 模型适配度分析
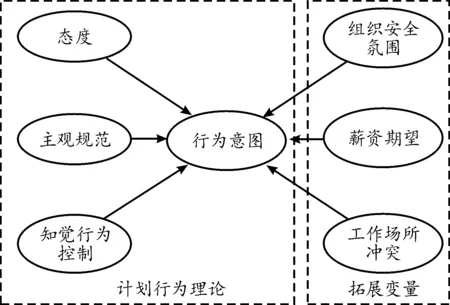
图2 结构方程模型框图
3.3 路径分析
通过对IDS危险骑行结构方程模型的作用路径分析可知,假设H1—H6兼成立,如表5所示。
态度对行为意图(β=0.156,P<0.05)正向作用显著。骑手对配送效率的追求强于交通规则的约束。配送任务时间窗的限制促使了骑手的危险骑行行为。
主观规范对行为意图(β=-0.153,P<0.05)负向作用显著。家庭规范取向影响骑手安全骑行潜意识。主观规范越强烈,骑手越倾向安全骑行。

表5 结构方程模型标准化路径系数检验结果
知觉行为控制对行为意图(β=0.396,P<0.05)正向作用显著,表明骑手危险感知能力与操纵控制能力的自我评价缺陷和不平衡致使骑手更愿意冒险骑行。在骑手招聘时对骑行能力和危险感知能力的忽视增加了配送途中的安全隐患。
安全氛围对行为意图(β=0.562,P<0.05)正向作用显著,消极的安全氛围对骑行安全影响极大,增加了交通冲突和事故的几率。而弱化的雇佣关系导致IDS平台单向控制骑手高效配送,却不承担所引发的交通事故责任,因此,平台往往在利益和骑手安全两者的选择中更倾向前者。
薪资期望对行为意图(β=0.201,P<0.05)正向作用显著。实际收入和期望薪资差距越大,骑手越容易冒险骑行以提高配送效率,获得更多收入。骑手需要平衡配送报酬与骑行安全。
工作场所冲突对行为意图(β=0.413,P<0.05)正向作用显著。在平台、商家、顾客和骑手四者中,骑手作为绝对弱势的一方,即使受到不公正待遇,也难以申辩,从而造成消极情绪,引发危险行为。
4 结论
1) 基于拓展TPB的IDS危险骑行行为意图的结构方程模型具有更好的拟合适配度、组织安全氛围、薪资期望和工作场所冲突拓展变量,提高了行为意图的解释能力。
2) 态度、主观规范、知觉行为控制、组织安全氛围、薪资期望、工作场所冲突对危险骑行行为意图路径作用显著,其中组织安全氛围、工作场所冲突和知觉行为控制3个变量的影响更加突出。
3) IDS平台招聘配送骑手时应加强安全意识和技术的考核与培训,提高骑手危险感知与应急反应能力,使其能够提早发现安全隐患,避免交通冲突与事故的发生。
4) 加强IDS平台与骑手雇佣关系的法律解释能力,依法提高骑手的话语权,加强骑手安全保障水平和事故后的索赔机制管理,防止平台单向牺牲骑手安全权益换取更多经济利益。同时,对于违法记录较多的骑手所在平台进行教育与处罚,加强交通安全知识法规普及力度。
