四轮独立驱动电动汽车直线行驶稳定性转矩协调控制
2022-06-18宋虎翼朱曰莹
宋虎翼,朱曰莹,幸 超,何 扬
(天津科技大学 机械工程学院, 天津 300222)
0 引言
目前新能源汽车正受到越来越广泛的关注。其中,四轮独立驱动电动汽车作为一种新型电动汽车,由4个独立控制的电机驱动4个车轮,更容易提高汽车的动力性、稳定性、安全性[1]。但由于不良的路面条件会对汽车的直线行驶操纵稳定性造成影响,致使汽车发生横摆运动和车轮打滑,所以需要根据汽车运行的实际状态协调控制各电机的输出转矩,使汽车保持稳定的直线行驶。
针对上述问题,欧健等[2]建立了二自由度车辆模型,基于模糊控制理论设计了横摆运动控制器,有效控制了车辆在附着系数较低路面的横摆运动。张一西等[3]提出了一种直接横摆力矩双层控制策略,综合考虑了电机约束和路面附着极限约束,提高了车辆行驶时的操纵稳定性。赵治国等[4]建立了四轮驱动混合动力轿车动力系统前向仿真模型,采用逻辑门限及P-Fuzzy-PI控制设计了基于整车能量管理策略的ASR控制算法,使滑转率能保持在最佳值附近。张博涵等[5]设计了基于双模糊算法的自适应驱动防滑控制器,对车轮滑转率进行了较为精确的控制,对理想滑转率跟随效果较好。以上文献中所采用的仿真模型分别对汽车横摆运动和车轮过度打滑具有较好的控制效果,但未考虑到将两者的控制相结合,对汽车直线行驶稳定性的控制效果不佳。贺志颖等[6]设计了附加横摆力矩控制器、驱动防滑控制器,协调输出了附加横摆力矩和驱动防滑力矩,有效提高了汽车直线行驶的稳定性。黄锡超等[7]建立了14自由度整车模型,并进行干扰工况的仿真控制,减小了车身横摆以及车轮打滑造成的影响。以上有关电动汽车操纵稳定性控制的文献多数采用简化后的电机模型作为驱动核心,这会使整车运行过程中的仿真效果过于理想化。并且所采用的控制方法都是传统的非线性控制方法,对于控制过程中的关键参数没有经过修正,导致在控制时会存在控制精度较低、抖振较大的问题。
为了能更好地模拟出汽车实际运行时的控制过程,并对控制精度加以提升,以实现对车速、横摆力矩、防滑力矩的协调控制,建立了四轮独立驱动电动汽车直线行驶稳定性控制仿真模型,在低附着系数路面、不同附着系数对开路面工况下进行联合仿真,对车辆直线行驶时的车速、横摆角速度和滑转率进行了有效控制。
1 车辆直线行驶稳定性研究
四轮独立驱动电动汽车在复杂路面上直线行驶时,由于路面附着条件的改变导致驱动车轮滑转,引起汽车发生失稳跑偏。针对这一问题,需要分析四轮独立驱动电动汽车在复杂路面上直线行驶稳定性。
汽车的直线稳定行驶控制包括直线行驶控制和稳定行驶控制2部分。其中直线行驶控制主要通过控制横摆角速度实现。如图1所示,当左侧车轮的纵向力之和与右侧车轮的纵向力之和相等时,车辆能保持直线平衡状态。而当两侧车轮的纵向力之和不等时,会产生绕质心轴的力矩,这将直接导致车轮跑偏,车辆出现横摆运动。此时为了抵消产生的横摆运动,需要借助车轮上的侧向力来产生抵消质心力矩的附加横摆力矩ΔMz。四轮独立驱动电动汽车在直线行驶时,其系统动力学微分方程为:

(1)
式中:Iz为绕z轴的横摆转动惯量;a为质心距前轴距离;b为质心距后轴距离;Fyi(i=1、2、3、4) 为四轮受到的侧向力;ΔMz为附加横摆力矩。
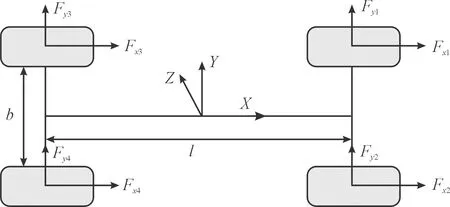
图1 汽车直线行驶四轮受力示意图
当驱动力矩施加在车轮上时,在车轮与路面接触处会产生驱动力[8]。此时,如果驱动力大于路面的附着力,车轮的线速度会快速上升,最终超过车辆纵向速度。车轮相对于地面做向后的滑动,这种边滚边滑的状态为车轮滑转,用滑转率S表示:
(2)
式中:ω为车轮的轮速,当S为0时,车轮为纯滚动状态,当S为100%时,车轮为纯滑动状态。随着滑转率的上升,汽车行驶时的稳定性就越低,并且会加速轮胎的磨损。当滑转率在20%左右时,地面纵向附着系数最大。因此,通过控制滑转率在20%附近,可以有效提高汽车行驶稳定性。
2 整车模型
在Matlab/Simulink中建立开关磁阻电机驱动系统模型,并导入在Carsim中搭建的车辆模型,完成整车模型的搭建。
2.1 车辆模型
车辆模型参数如表1所示。根据车辆模型参数,在Carsim软件中建立车辆模型,其驱动核心为4个开关磁阻电机,主要观察车辆车速、四轮轮速、横摆角速度、侧向力。
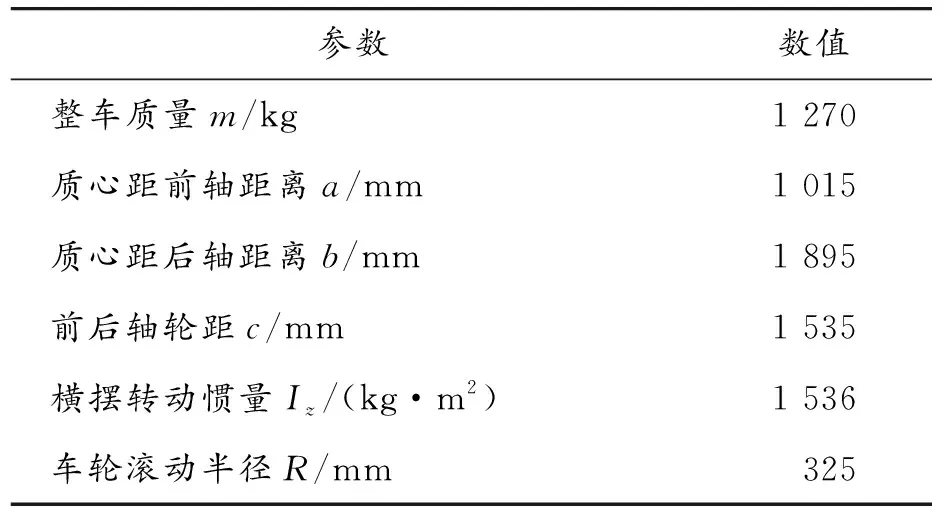
表1 车辆模型主要参数
2.2 8/6四相开关磁阻电机模型
轮毂电机为四轮独立驱动电动汽车的驱动核心,其工作特性会对汽车直线行驶时的协调控制产生影响[9]。以往有关电动汽车操纵稳定性的研究多数采用简化后的电机模型,为了给出更加贴合实际的仿真论证,采用的电机模型为8/6四相开关磁阻电机。开关磁阻电机具有电机结构简单、成本低、功率电路简单高效、启动转矩大等优点[10]。开关磁阻电机每一相通过一个功率开关控制,结构设计简单,并且能有效防止短路,使其以较小电流产生较大转矩,可有效提高汽车的启动加速性能。
开关磁阻电机第k相绕组电压平衡方程为:

(3)
式中:Uk为第k相绕组的端电压;ik为第k相绕组的电流;Rk为第k相绕组的电阻;ψk为第k相绕组的磁链。
每相绕组的磁链与相电流和相电感有关,如果忽略电机各相间的互感,则第k相绕组的磁链方程为:
ψk(θ,ik)=Lk(θ,ik)ik
(4)
式中:Lk为第k相的电感。将式(4)代入式(3),得:

(5)
开关磁阻电机本体是该驱动系统的核心部分,所建立的开关磁阻电机驱动系统由8/6四相开关磁阻电机本体、动力电池、功率变换器、转矩估计器、转矩控制器、电流控制器组成,如图2所示。
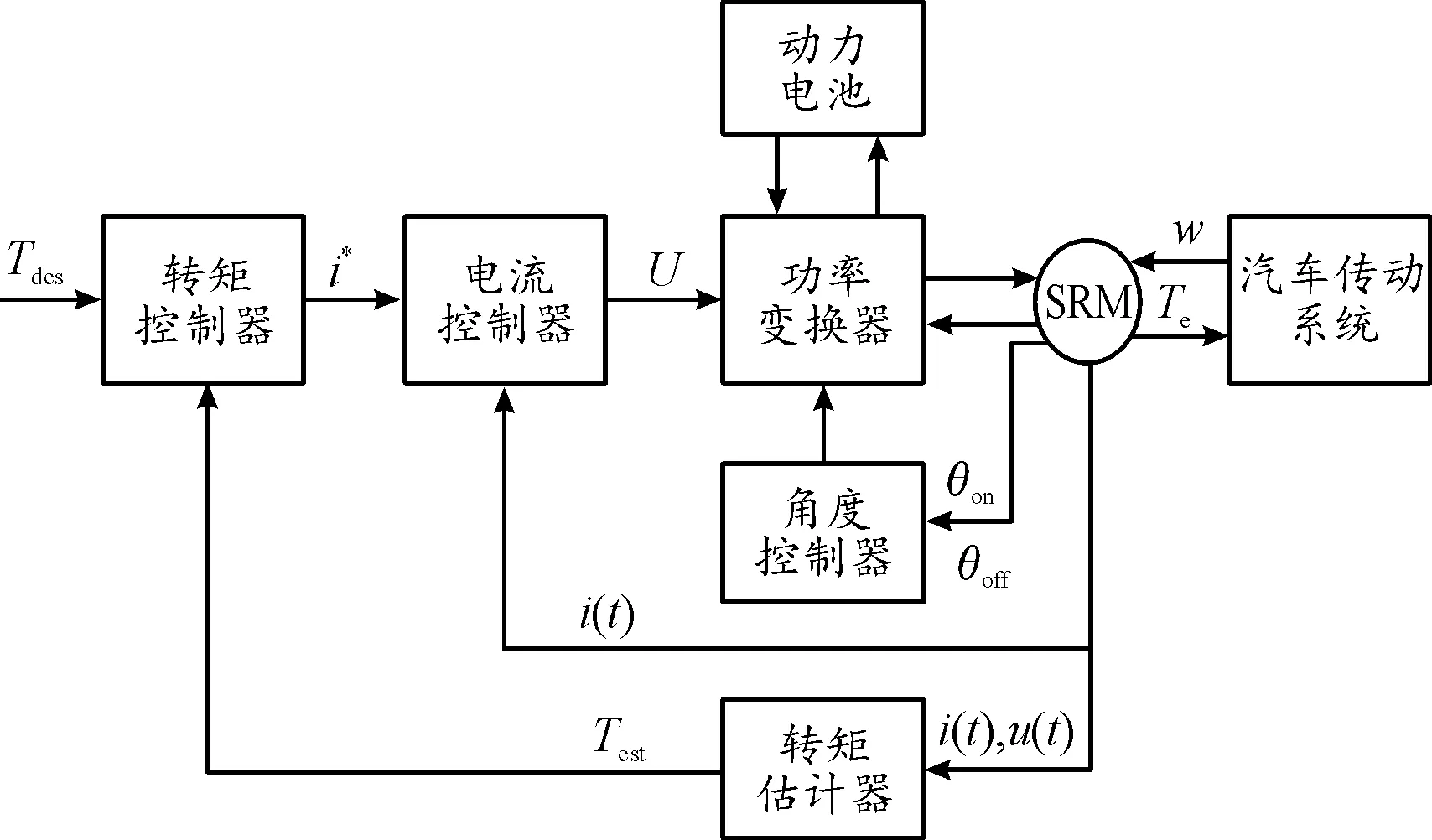
图2 开关磁阻电机驱动系统模型框图
开关磁阻电机的主要参数如表2所示。
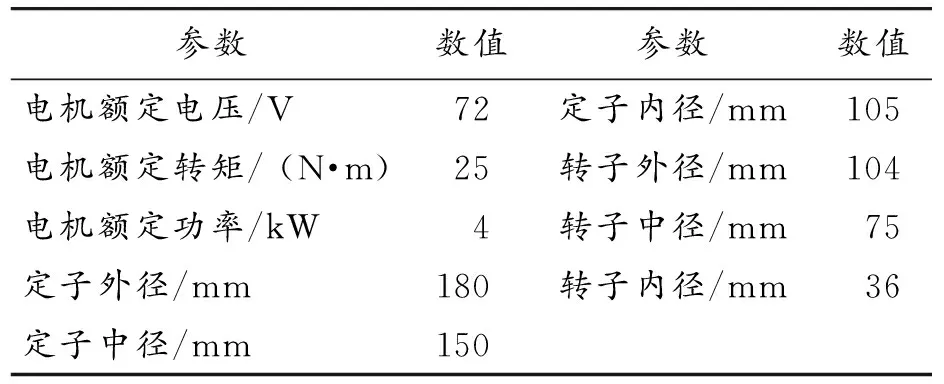
表2 开关磁阻电机的主要参数
3 直线行驶稳定性车辆控制系统设计
3.1 车速控制器设计
PID控制器具有控制响应速度快、反馈效率高、参数调节便捷的优点,在工程控制中被广泛应用[11]。模糊控制是一种能从控制行为上模拟人脑分析及推断的控制方法[12]。PID控制的参数往往是预先设置好,不能根据偏差及偏差变化率的动态特性做出实时调整。模糊控制往往依赖于专家经验,导致其控制效果和灵敏度降低。为了提高控制精度,将模糊控制与PID控制相结合,设计模糊自适应PID控制器。
车速控制器的输入量为期望速度ud及实际车速u,模糊输入为两者的偏差e和偏差变化率ec,模糊输出为比例系数Kp和积分系数Ki,如图3所示。
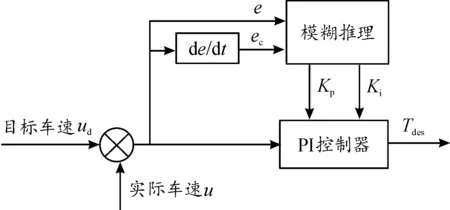
图3 模糊自适应PID控制器结构示意图
输入、输出变量的模糊子集均为{NB,NS,ZO,PS,PB}。由于隶属度函数形状较尖的模糊子集,其分辨率和控制灵敏度更高,故隶属度函数类型均采取三角形[13],如图4所示。
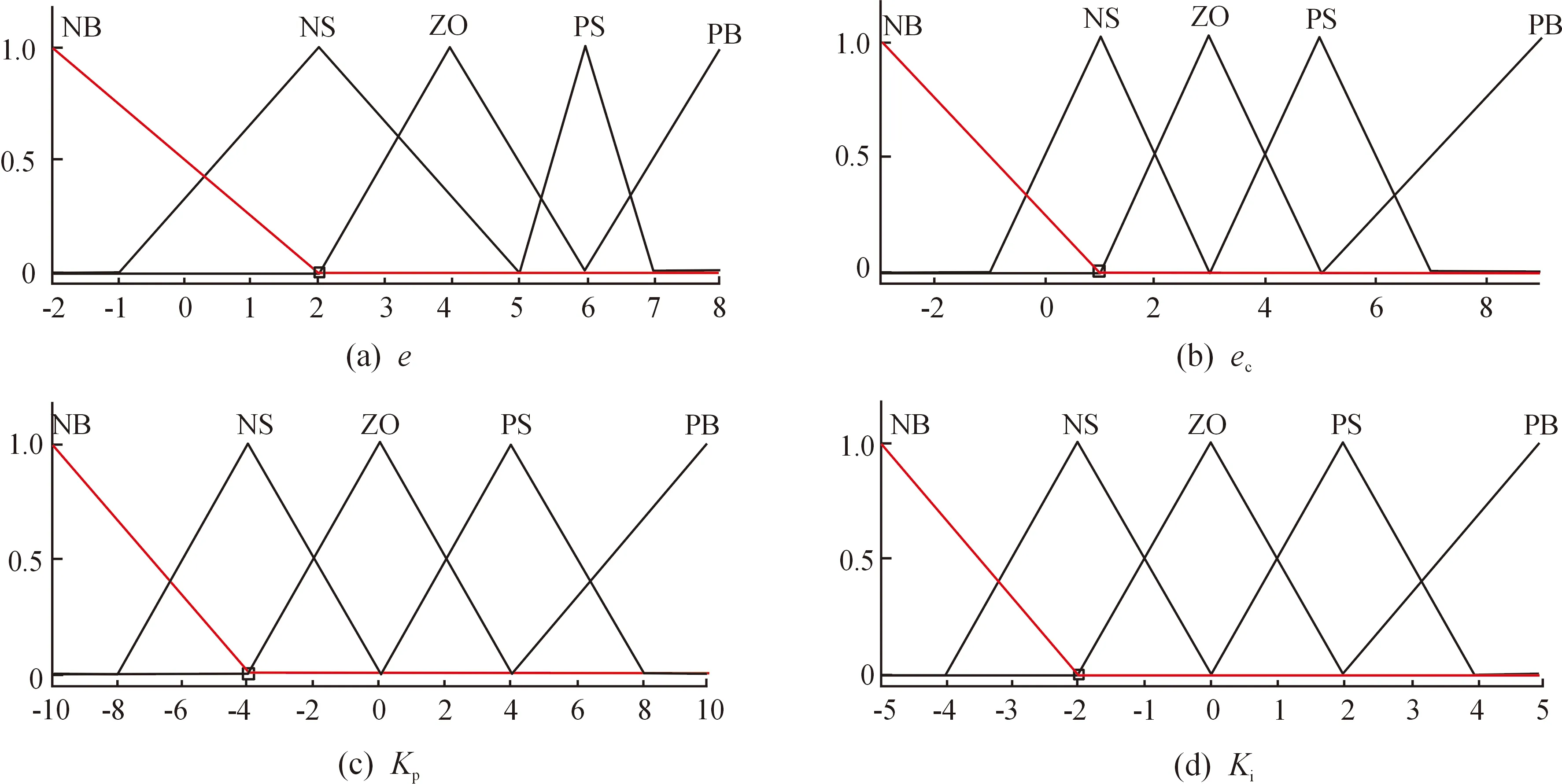
图4 车速控制器各变量隶属度函数曲线
Kp模糊控制规则和Ki模糊控制规则分别如表3、4所示。
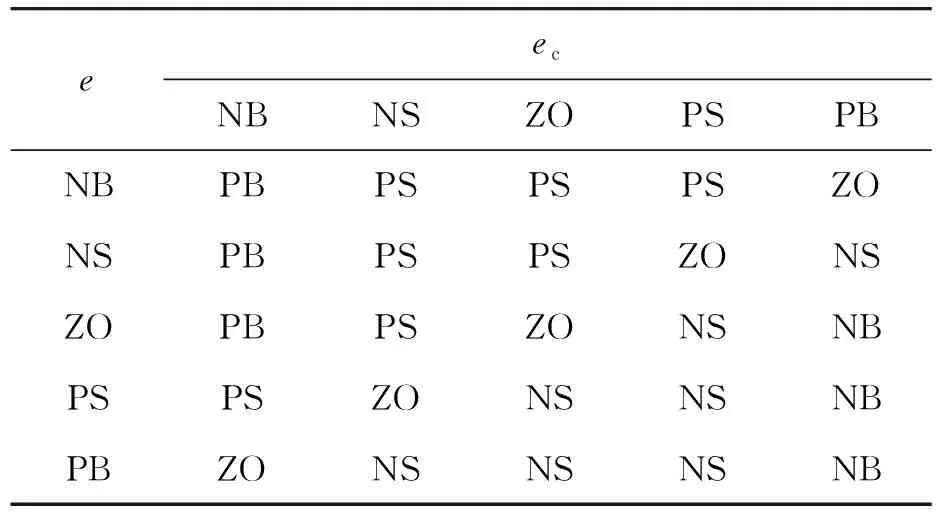
表3 Kp模糊控制规则
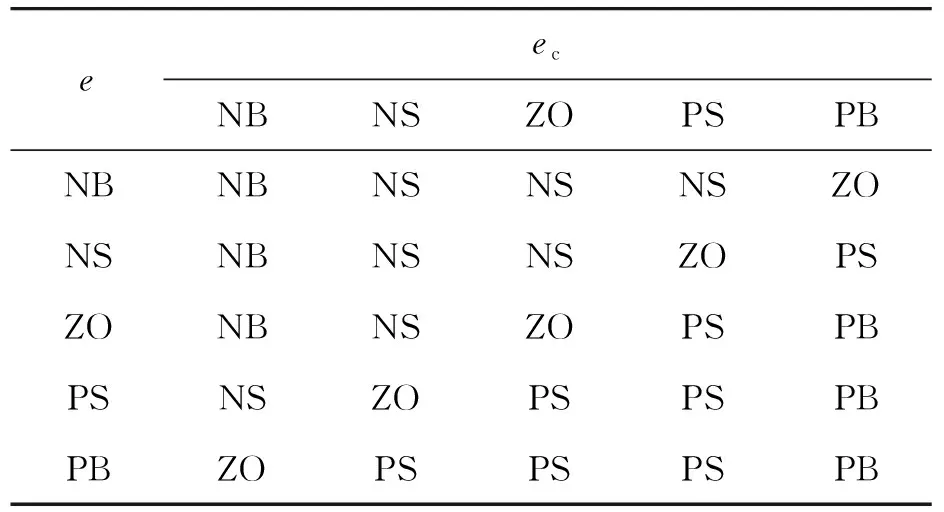
表4 Ki模糊控制规则
通过PI控制器计算车辆的期望转矩Tdes:

(6)
3.2 横摆运动控制器设计
滑模变结构控制是一种高级非线性控制系统,这种非线性控制响应速度快、鲁棒性好,控制精度受外界干扰所产生的影响较小[14-15]。
由式(1)得到横摆角速度微分表达式:
(7)
基于滑模变结构控制原理设计横摆运动控制器。首先,确定滑模切换面函数:

(8)
ωd为期望横摆角速度,假设为0,即:
(9)
对式(9)微分可得:
(10)
将式(7)代入式(10)整理可得:
(11)
其次,设计滑模控制规则,采用指数趋近律的形式:
(12)
采用连续函数代替符号函数sgn(S):
(13)
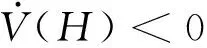
由于滑模控制存在抖振问题,使系统在稳定点附近出现波动。针对系统抖振问题,设计了一种基于模糊趋近律理论实时调节滑模控制参数的新型控制策略,将模糊控制与指数趋近律结合。在式(12)中,k2表示了系统状态趋近滑模切换面的速度,依据控制理论,当系统状态与滑模面距离较远时,k2应较大,以使系统状态加速趋近滑模面,当系统状态离滑模面较近时,k2应较小,使趋近速度放缓以减小抖振。基于以上理论,设计一维模糊控制器,根据S的大小实时调节趋近律参数k2,模糊控制器的输入量为S,输出量为k2,输入、输出变量的模糊子集均为{NB,NS,ZO,PS,PB},如图5所示。模糊控制规则如表5所示。
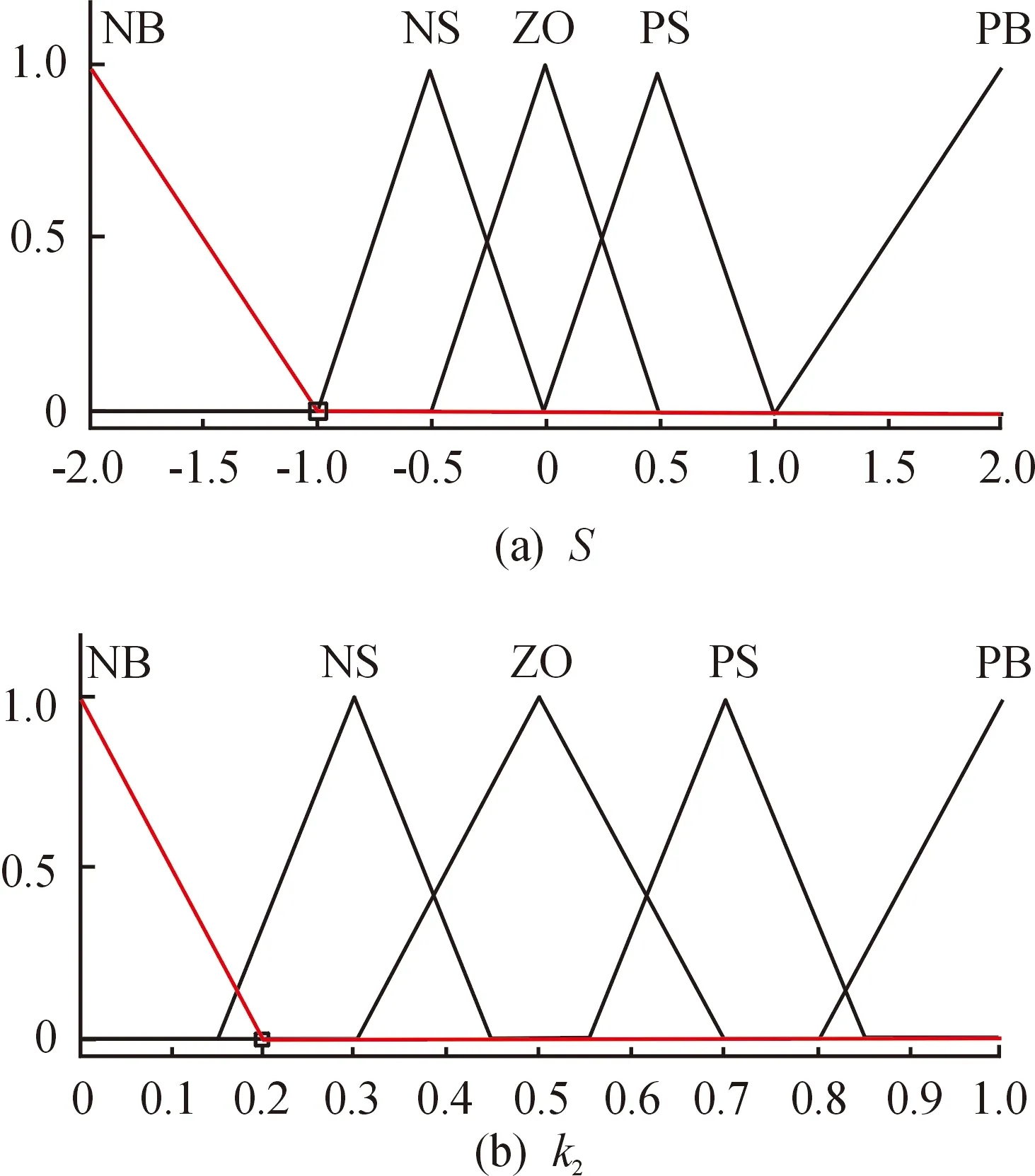
图5 模糊运动控制器各变量隶属度函数曲线

表5 横摆运动控制器模糊控制规则
对控制系统进行李雅普诺夫稳定性分析,定义Lyapunov函数:
(14)
(15)
根据Lyapunov原理[15],设计的滑模控制满足式(16)。
(16)
滑模控制符合稳定性控制要求,控制过程逐渐趋于稳定。
综上所述,整理式(11)(12),可以得到控制汽车直线行驶稳定性的附加横摆力矩:
(17)
3.3 防滑控制器设计
由于滑转率在20%附近时,地面纵向附着系数最大,稳定性较好,所以选取0.2为滑转率S的目标值,设计滑模函数如下:

(18)
对式(18)微分可得:
(19)
设计滑模规则,选用指数趋近律:

(20)
使用连续函数代替符号函数sgn(H):
(21)
将式(19)与式(20)(21)联立,可得:
(22)
对控制系统进行李雅普诺夫稳定性分析,定义Lyapunov函数:
(23)
(24)
根据Lyapunov原理[16],设计的滑模控制满足式(25)。
(25)
符合稳定性控制要求,控制过程逐渐趋于稳定。
驱动电机转速与转矩关系如下:
(26)
式中,电机输入转矩T由以下3部分组成:
T=Tdes+Tz+Ts
(27)
式中:Tdes为期望转矩;Tz为车轮上各电机的附加横摆转矩;Ts为防滑转矩。
将式(2)与式(22)联立可得:
(28)
将式(26)(28)代入式(27)可得:
(29)
设计一维模糊控制器,根据H的大小实时调节趋近律参数k2,模糊控制器的输入量为H,输出变量为k2,输入、输出变量的模糊子集均为{NB,NS,ZO,PS,PB},如图6所示。模糊控制规则如表6所示。
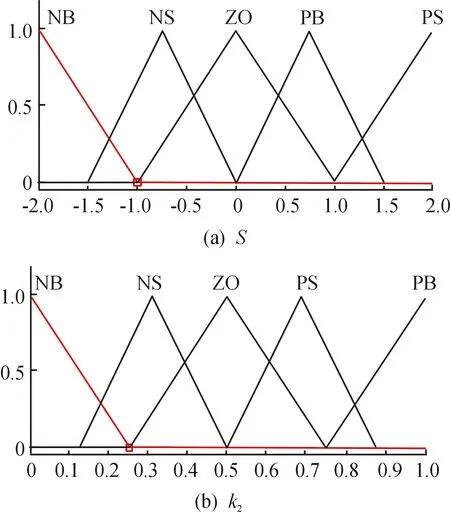
图6 防滑控制器各变量隶属度函数曲线

表6 防滑控制器模糊控制规则
3.4 转矩协调控制
基于3.2、3.3节设计的横摆运动控制器和防滑控制器,得到控制汽车直线行驶稳定性的附加横摆力矩ΔMz和防滑力矩Ts,根据汽车行驶的状况分配4个车轮的转矩。
1) 期望力矩分配
汽车在路面上行驶时,能够提供汽车正常行驶的期望力矩为Tdes,由于研究四轮独立驱动电动汽车在极限工况下的行驶特性,故需要尽可能地提升操纵稳定性。为了减小四轮驱动转矩差异对操纵稳定性的影响,对4个车轮转矩进行平均分配。
2) 附加横摆力矩分配
为了减小汽车在复杂路面行驶时的横摆运动,对汽车施加一个附加横摆力矩,并分配到4个车轮上[17],每个车轮的附加横摆转矩为:
(30)
式中:Tzi(i=1、2、3、4)为转矩协调控制器分配到各轮的附加力矩;c为汽车两轴轮距,一般认为前后轴轮距相同;R为车轮转动半径。
3) 防滑力矩分配
各个车轮的防滑力矩为Tsi(i=1,2,3,4)。为增加汽车的行驶稳定性,同轴两侧车轮附加的防滑力矩应该保持相同。因此,前、后轴车轮的防滑力矩为:
Tsf=max(Ts1,Ts2)
(31)
Tsr=max(Ts3,Ts4)
(32)
式中:Tsf、Tsr为前、后轴两侧车轮的防滑力矩。
综合式(27)(30)(31)和式(32),汽车在复杂路面上直线行驶时,每个车轮的驱动力矩为:
(33)
(34)
(35)
(36)
3.5 直线行驶车辆稳定性仿真模型
基于3.1、3.2、3.3节设计的车速控制器、横摆运动控制器和防滑控制器以及3.4节提出的转矩协调分配方法,搭建联合仿真模型(如图7所示)。该模型包括汽车动力学模型、开关磁阻电机模型、车速控制器、横摆运动控制器、防滑控制器以及转矩协调控制器。
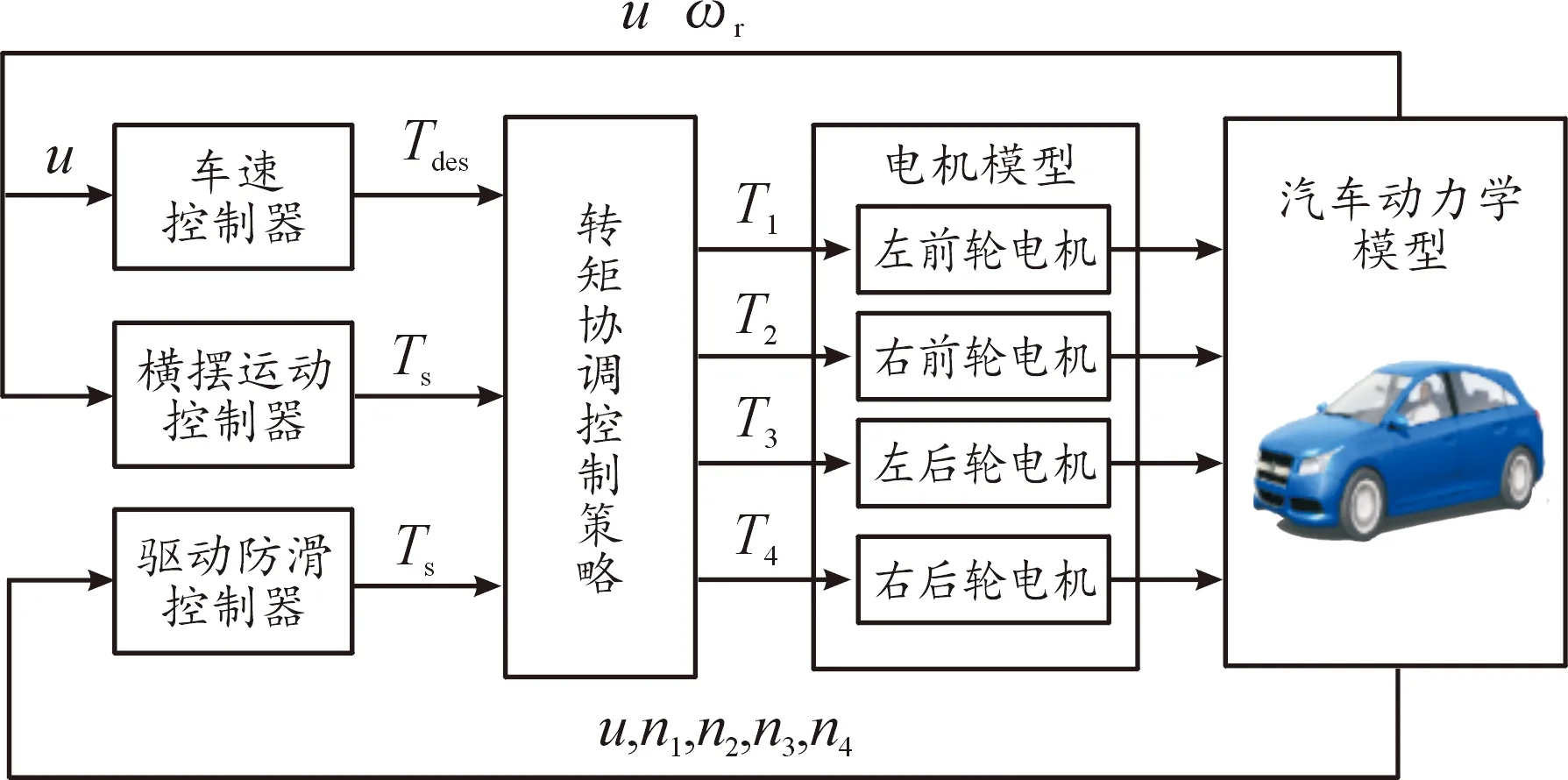
图7 直线行驶稳定性控制仿真模型框图
4 仿真验证及分析
根据3.5节搭建的直线行驶车辆稳定性仿真模型,在低附着系数路面和不同附着系数对开路面工况下进行仿真分析,验证控制方法的有效性。仿真工况设置为车辆原地起步加速至期望车速60 km/h,在无转矩协调控制下仅保留车速控制器输出达到期望车速的驱动转矩。
4.1 低附着系数路面仿真
车辆在附着系数为0.2的路面上行驶,仿真时长为30 s。仿真结果如图8。车速变化曲线如图8(a)所示,在无转矩协调控制下,车速上升到62.5 km/h并保持稳定;在有转矩协调控制下,车速上升到60.5 km/h,并保持稳定。横摆角速度如图8(b)所示,在无转矩协调控制作用下,横摆角速度在8~30 s上下波动较大,最大幅值为16 (°)/s;而在有转矩协调控制下,横摆角速度在整个仿真过程都被控制在极小范围内。右侧、左侧车轮滑转率如图8(c)(d)所示,无转矩协调控制下,右侧车轮的滑转率在0~1.8 s以及8~30 s之内在0~0.4之间波动,左侧车轮的滑转率在初始时刻快速上升到0.88,并一直在0.9附近波动。而经过转矩协调控制后,左、右轮滑转率均能快速控制到0.19左右。
图8 低附着路面仿真结果曲线
4.2 不同附着系数对开路面仿真
车辆在左侧路面附着系数为0.2,右侧道路附着系数为0.8的对开路面上行驶,仿真时长为30 s。车速变化曲线如图9(a)所示,在无转矩协调控制作用下,车速上升到66.1 km/h,并保持稳定;在有转矩协调控制下,车速上升到62.2 km/h,并保持稳定。横摆角速度如图9(b)所示,在无转矩协调控制下,横摆角速度在6.5~30 s上下波动较大,最大幅值为10 (°)/s,而经过了转矩协调控制后,横摆角速度在5 s之后被控制在了极小范围内。右侧、左侧车轮滑转率如图9(c)(d)所示,无转矩协调控制下,右侧车轮的滑转率在0~1 s及8~13 s波动较大,左侧车轮的滑转率在初始时刻快速上升到0.89,并一直稳定在0.9左右。而经过转矩协调控制后,左、右侧车轮滑转率均能稳定在0.19左右。
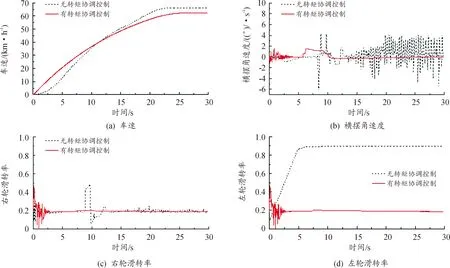
图9 不同附着系数对开路面仿真结果
5 结论
1) 建立的四轮独立驱动电动汽车直线行驶稳定性控制仿真模型能迅速控制汽车在低附着系数路面、不同附着系数对开路面上行驶时所产生的横摆运动和车轮过度打滑现象,并使汽车稳定上升至目标车速,控制过程中,滑模变结构控制参数会根据系统状态实时调节,使控制量波动较小。
2) 在汽车加速过程中,协调控制车速、横摆角速度和滑转率在最优值附近。由于仿真环境较为理想,需要进一步研究在极端天气下的汽车直线行驶稳定控制。
