改进单神经元网络PID算法下的车用轮毂电机控制系统仿真
2022-06-18陈哲明庄威洋
陈哲明,陶 军,庄威洋,钟 诚
(1.重庆理工大学 汽车零部件先进制造技术教育部重点实验室, 重庆 400054;2.重庆理工大学 车辆工程学院, 重庆 400054)
0 引言
轮毂电机传动效率高、结构简单,已经在电动汽车领域获得了广泛应用。相对于普通无刷电机大多采用控制简单、成本低廉的六步方波驱动,车用轮毂电机大多采用换向转矩脉动小的磁场定向控制。车用轮毂电机控制系统中,高性能的驱动控制器是至关重要的一部分,既决定了系统的响应速度,又影响电机的控制精度。传统的比例、积分、微分控制算法因其结构简单、易于工程实现被广泛应用于各类控制系统。但轮毂电机是典型的多变量、高耦合性的非线性系统,传统比例、积分、微分控制对于轮毂电机控制系统便不能达到理想的控制效果。车用轮毂电机一般采用外转子式永磁同步电机,20世纪以来,控制领域的众多学者提出了各种先进控制算法对永磁同步电机进行控制,其中典型的一些算法包括:模糊控制[1-2]、滑膜变结构控制[3-5]、自抗扰控制[6]、遗传算法[7-8]、神经网络算法[9-12]等。以上方法大多结构复杂、延迟性高或者参数调节困难,均未在永磁同步电机控制中获得广泛应用。
单神经元网络是一种结构简单的神经网络,但仍具有神经网络自学习与自适应的特性,且易于工程实现。凡占稳等[13]将单神经元PID控制算法应用到真空热处理系统的温度控制上,结果表明,单神经元PID算法对温度控制更加稳健,具有更强的抗干扰能力和鲁棒性。严友等[14]利用单神经元网络PID设计了一种轨迹跟踪控制器,并应用在农用车辆上,获得了优秀的控制精度。尹洪桥等[15]利用一种单神经元PID,对无刷直流电机转速环进行控制,结果表明,在该算法下电机有着更稳定的运行状态以及更快的响应,证明了单神经元网络在永磁同步电机的控制中有一定的应用前景。本文将建立车用轮毂永磁同步电机模型,搭建轮毂电机矢量控制双闭环控制系统,在转速环加入一种改进单神经元网络PID控制算法,并与改进前单神经元网络PID、传统PID算法进行对比分析。
1 轮毂电机矢量控制模型的建立
在模型建立之前做出如下假设[16]:① 定子绕组采用星型接法,各绕组之间间隔120°的电角度;② 忽略定子铁芯的磁饱和效应;③ 忽略定子与转子的磁滞损耗和涡流损耗,永磁体转子与定子之间无阻尼作用。
为了便于后期控制器的设计,在建立模型时,将自然坐标系下的数学模型通过Clark变换、Park变换后得到等效于转子旋转坐标系d-q轴下的数学模型,d轴与q轴的电压方程为:
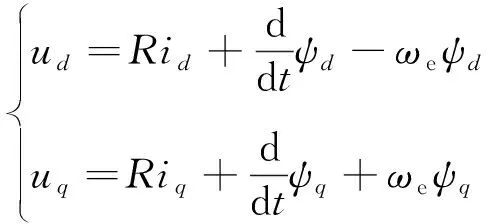
(1)
式中:ud、uq分别为定子电压的d-q轴分量;id、iq分别为定子电流的d-q轴分量;R为定子电阻;Ψd、Ψq为定子磁链d-q轴分量;ωe为电角度。
定子磁链方程为:
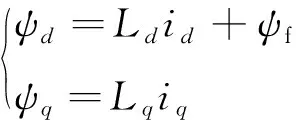
(2)
式中:Ld、Lq分别为d-q轴的电感分量;ψf代表永磁体转子磁链。
将式(2)代入式(1)得d-q轴下电压方程:
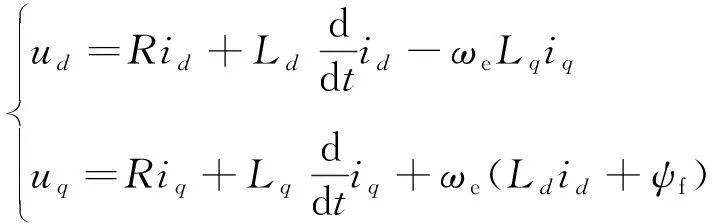
(3)
电磁转矩方程为:
(4)
式中:Te为电磁转矩;Pn为电机极对数;id为励磁电流,增加电机发热造成能量损失,采用id=0的控制方法,则电磁力矩方程:
(5)
机械运动方程为:
(6)
式中:TL为负载转矩;J为转动惯量;B为黏滞摩擦因数。
2 单神经元网络PID控制的原理及设计
拥有自学习与自适应能力的单神经元构成的单神经元网络PID控制算法,结构简单且能适应各种变化,具有较强的鲁棒性。单神经元网络PID控制本质上就是将比例、积分、微分作为神经元的权值,并通过不同的学习规则来实现对权值的调整从而实现控制器自适应、自调整的功能。单神经元网络PID控制算法的结构如图1所示。
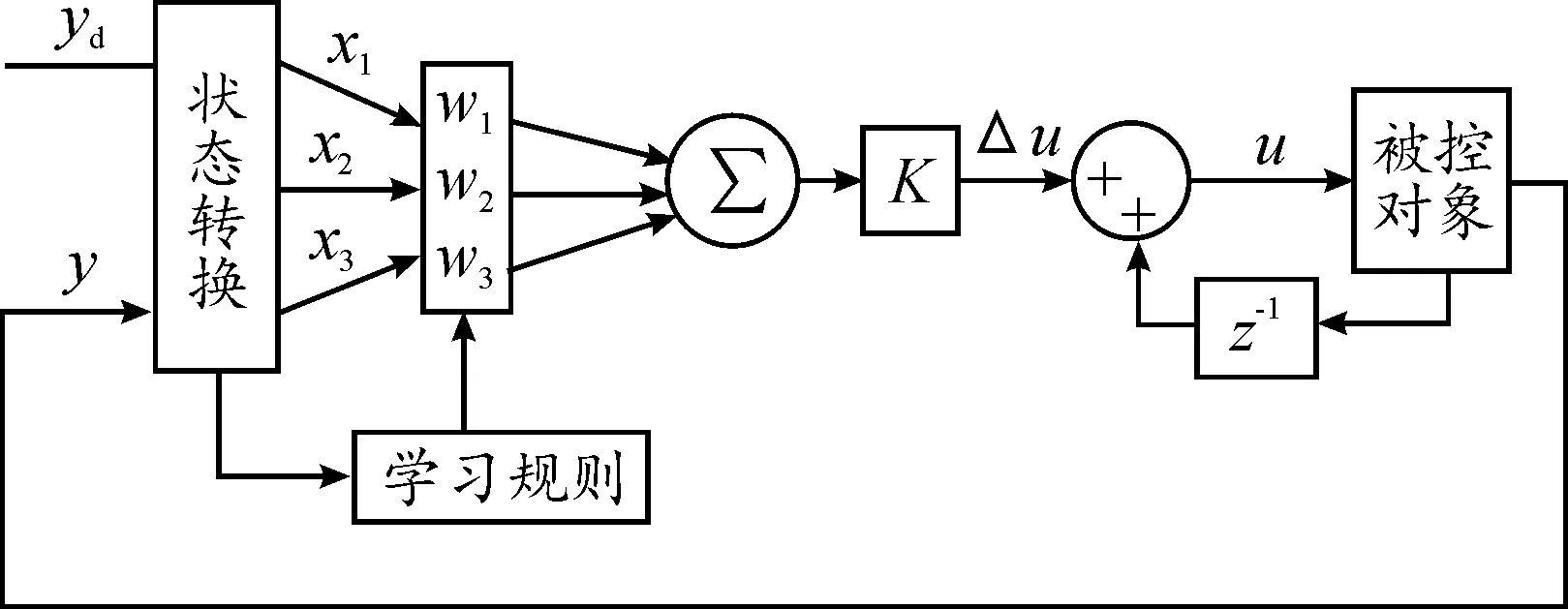
图1 单神经元网络PID结构框图
图1中,状态转换器的输入为给定值yd与被控对象输出量y,两者经状态转化后转换成神经元的输入量x1、x2、x3,并通过学习规则调整神经网络的连接权值w1、w2、w3,单神经元PID算法正是通过对权值的调整来实现控制的自适应。状态转换输出量x1、x2、x3定义为与系统误差有关的变量:
(7)
式中:e(k)为当前时刻系统输入输出的误差;e(k-1)为前一采样时刻的误差;e(k-2)为前2个采样时刻的误差,x1、x2、x3为误差e(k)的不同状态转换值。由图1,神经元输入、输出量之间的关系为:
(8)
式(8)与离散化的增量式PID的形式基本一致,区别仅仅在于增量式PID的比例、微分、积分系数一旦调整完成以后便不可改变,而单神经元可以通过自学习功能进行权值调整。正是因为w1、w2、w3可以根据被控对象的变化而调整,单神经元网络PID可以提高控制系统的自适应能力,相比于传统PID控制,它无需对被控对象进行精确建模,对具有不确定因素的控制系统,控制精度能显著提高。
单神经元网络PID控制算法在有监督的Hebb学习规则下的控制算法为:
(9)
(10)
权值的更新规则根据有监督的Hebb学习规则来进行:
(11)
式中:z(k)为神经元输出误差信号,取z(k)=e(k);ηP、ηI、ηD分别为比例、积分、微分权值的学习率。
考虑到实际中权重系数的修改与e(k-2)的影响较小,且e(k-2)的存在将使算法的计算量大大增加,造成响应延迟。因此,在权值的更新规则中将xi(k)更改为与权重系数密切相关的[e(k)+Δe(k)],修改后的算法将显著提高系统的收敛速度,调整后的权值更新算法如下:
(12)
自学习是单神经元网络PID最大的特点,不同的学习规则对其性能的影响很大,所以改进学习规则算法对提高性能有较大影响。因此,引入最优控制理论中二次型误差性能指标对控制器的学习规则进行优化,以提高轮毂电机的控制性能。
在最优控制理论中,采用二次型性能指标来设计控制规律,可以很好地得到所期望的控制效果。在单神经元网络PID学习规则中引入误差平方二次型性能指标,引入的性能指标函数如下:

(13)
权重系数的调整量Δwi(k)按照梯度下降的方式进行调整,即:
(14)
式中:ηi(i=P,I,D)为学习速率,

(15)
在计算中,∂y(k)/u(k-1)通常难以计算,因此,采用符号函数sign(∂y(k)/u(k-1))描述其变化趋势。经改进后的学习规则算法为:
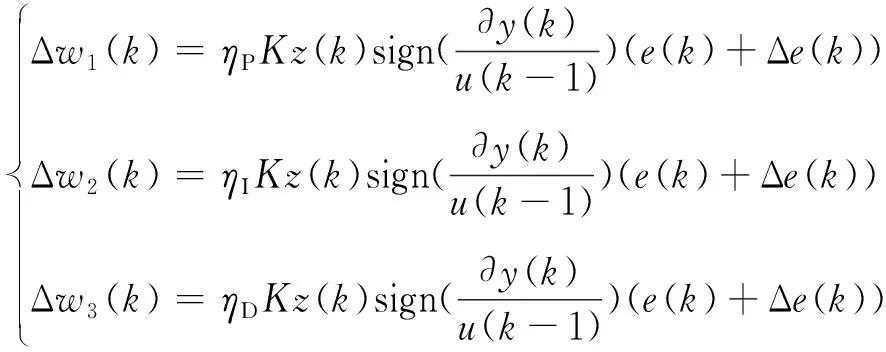
(16)
改进单神经元网络PID控制器通过电机的目标转速Nref与实际转速Nr的偏差e作为控制器的输入量,通过改进二次型误差性能指标学习规则,自动调整控制器的比例、微分、积分权值,得到控制器的输出u。控制器的输出u经电流环运算得到电机的电压控制信号实现电机转速的闭环控制。改进单神经元网络PID控制框图如图2。
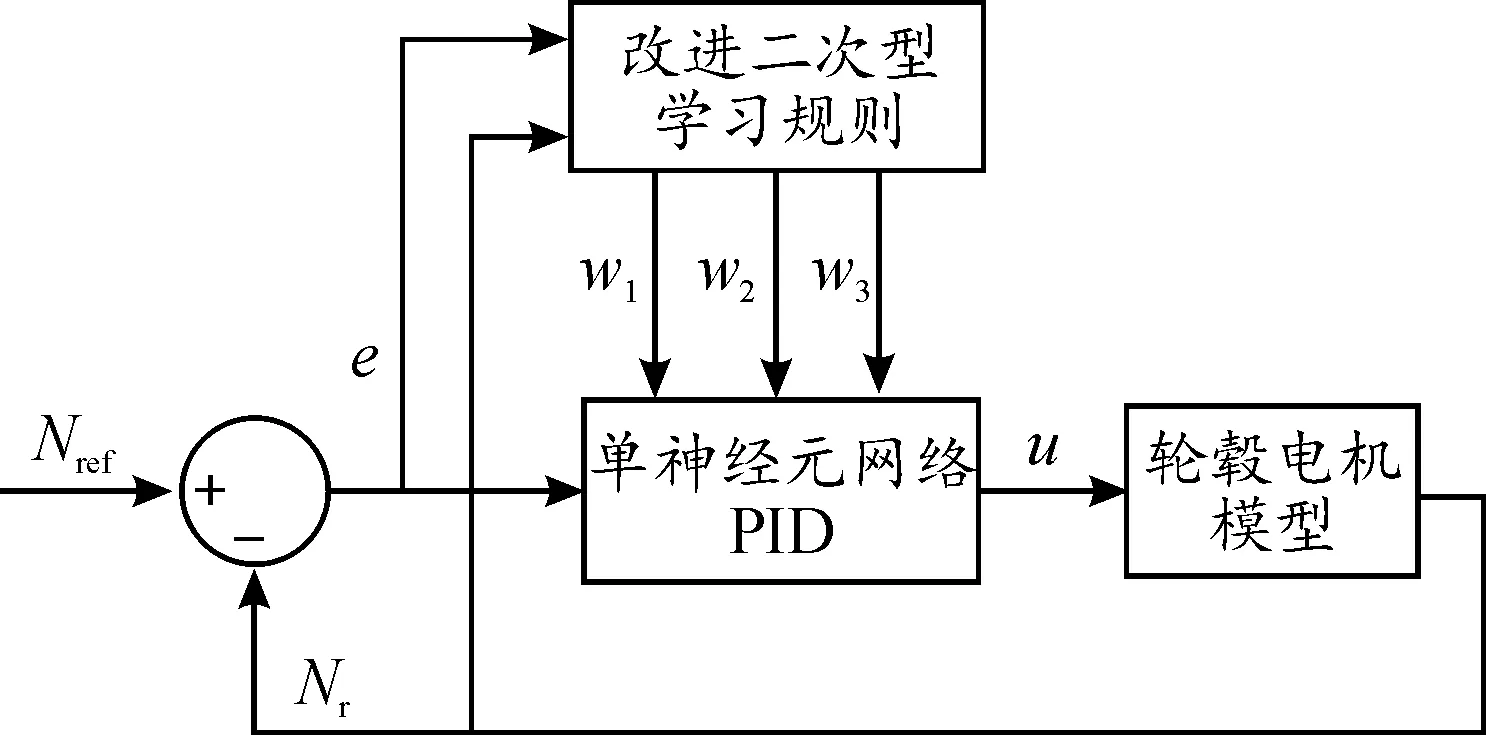
图2 改进单神经元网络PID轮毂电机速度环控制框图
3 仿真分析
仿真研究中选择的电机各项参数如表1所示。
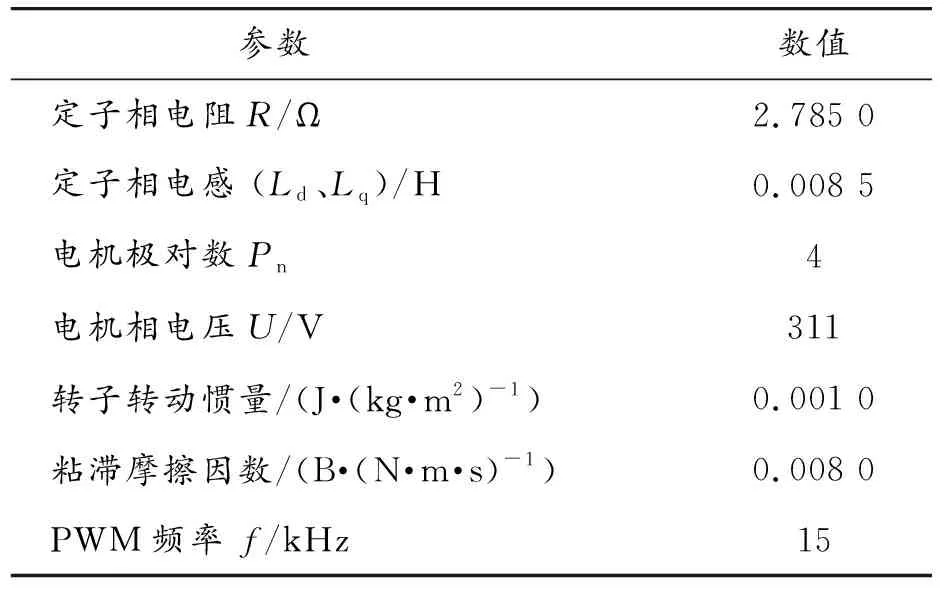
表1 电机参数
在Matlab/Simulink环境下建立轮毂电机矢量控制双闭环模型,电流内环使用比例积分控制,并且在转速环中加入改进单神经元网络PID控制。建立的轮毂电机控制系统仿真模型如图3。
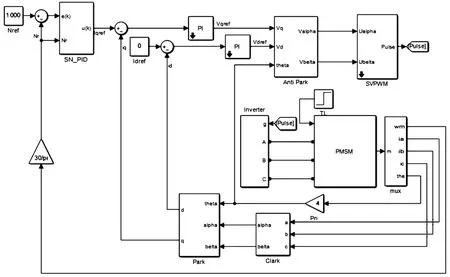
图3 轮毂电机控制系统仿真模型示意图
图3中,速度环SN_PID即为改进单神经元网络PID控制器,在单神经元网络PID算法的实现上采用Matlab中S-function函数进行编写。在矢量控制速度环中分别对改进单神经元网络PID控制、单神经元网络PID控制、常规PID控制进行仿真,以分析改进单神经元网络PID控制的可行性。
仿真时间设置为0.2 s,空载下启动电机,t=0 s时刻,给定目标转速1 000 r/min,转速阶跃响应曲线如图4。
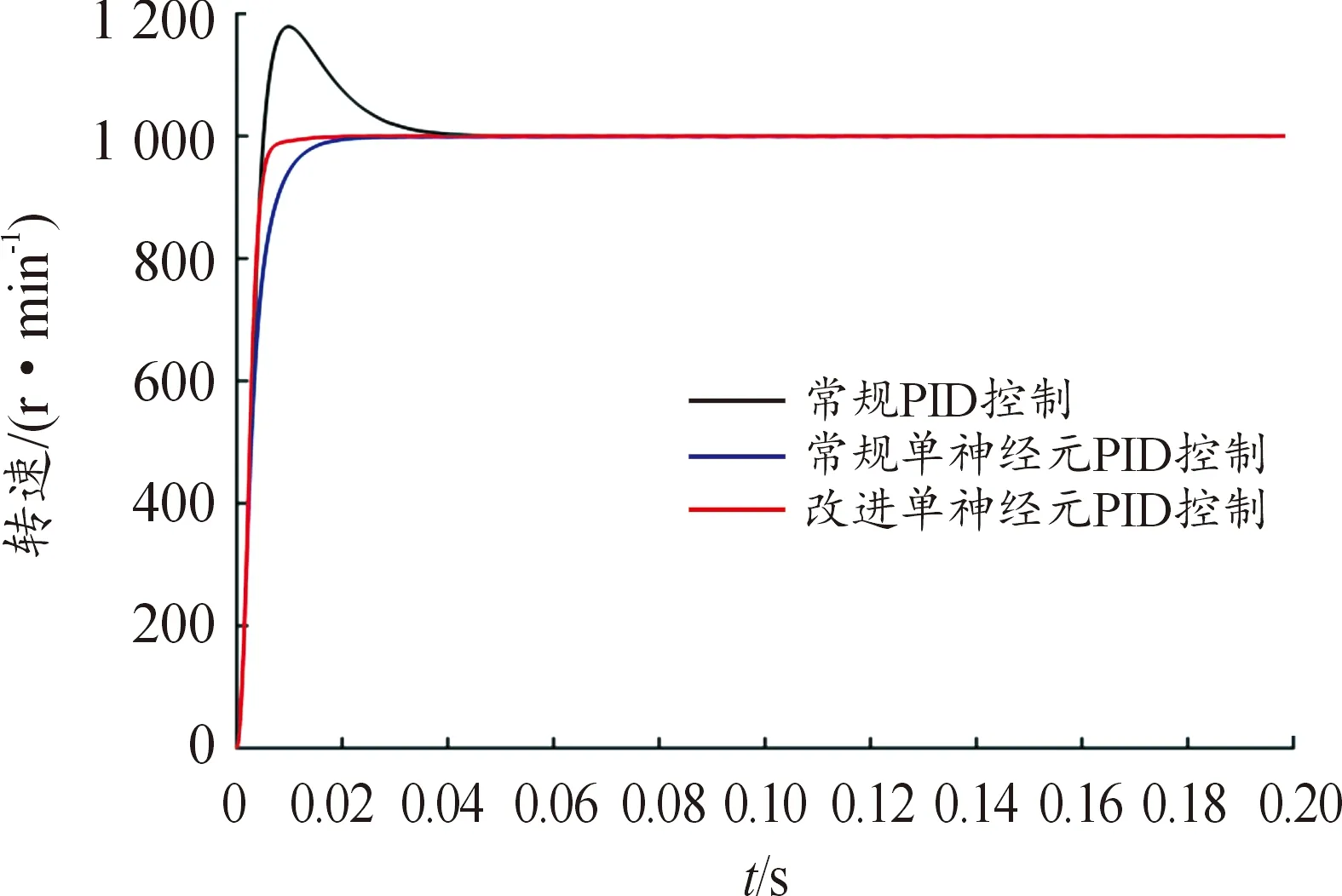
图4 转速阶跃响应曲线
由图4可知,当转速给定为1 000 r/min时,常规PID的上升时间约为0.011 s,超调量约为17.9%,达到稳态的时间为0.045 s;常规单神经元网络PID的上升时间与达到稳态的时间约为0.023 s;改进单神经元网络PID的上升时间与达到稳态的时间约为0.012 s,2种单神经元网络PID均几乎没有产生超调。
图5是空载下转速阶跃响应时电磁力矩Te的变化曲线。由图5可见,改进单神经元网络PID控制相比于另外2种控制有更快的电磁力矩响应时间、较小的力矩波动,并且能更快地达到稳定运行状态。
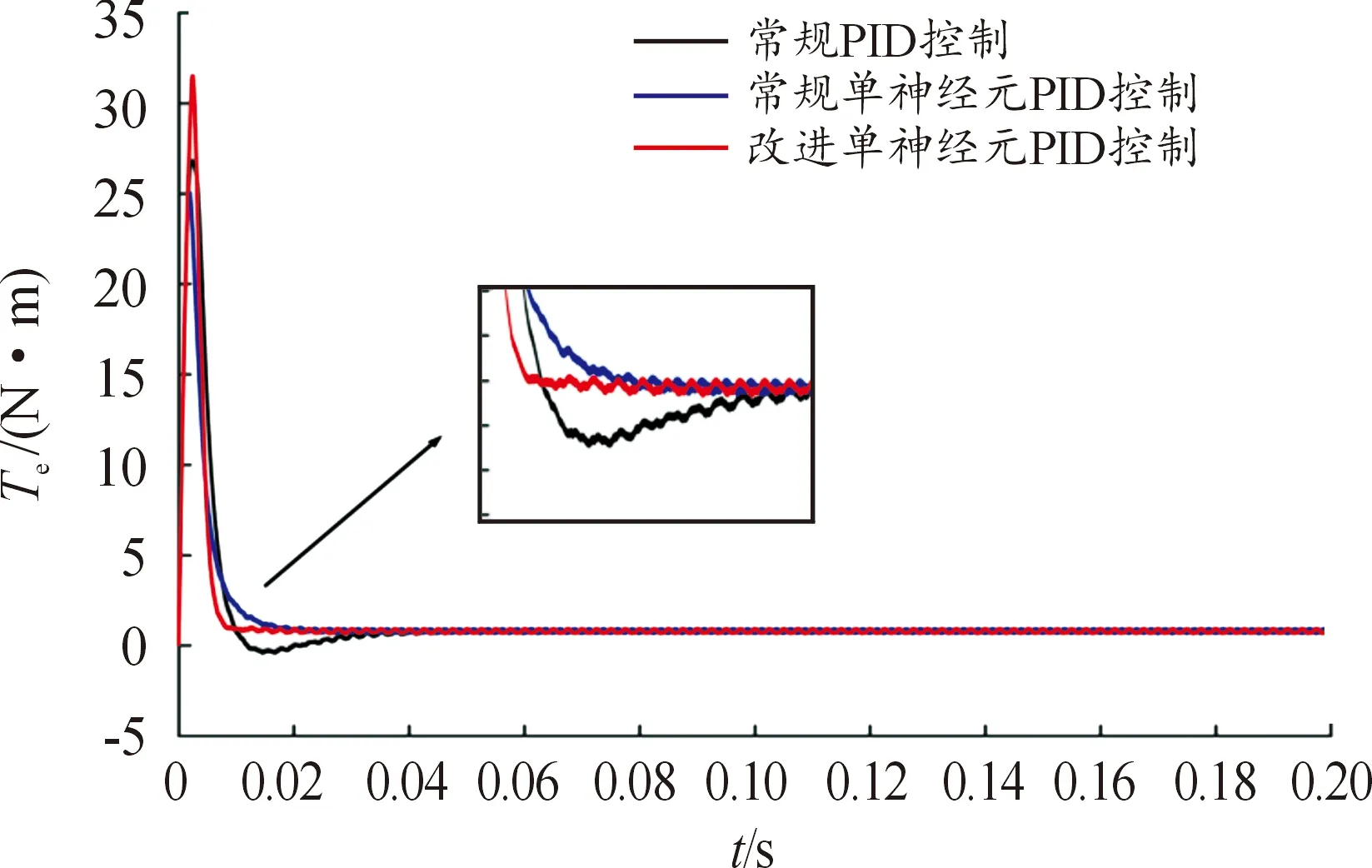
图5 转速阶跃响应下电磁力变化曲线
设置目标为转速1 000 r/min,在t=0 s时,空载起动; 0.1 s时施加负载转矩至10 N·m,转速响应与电磁转矩响应如图6、图7所示。
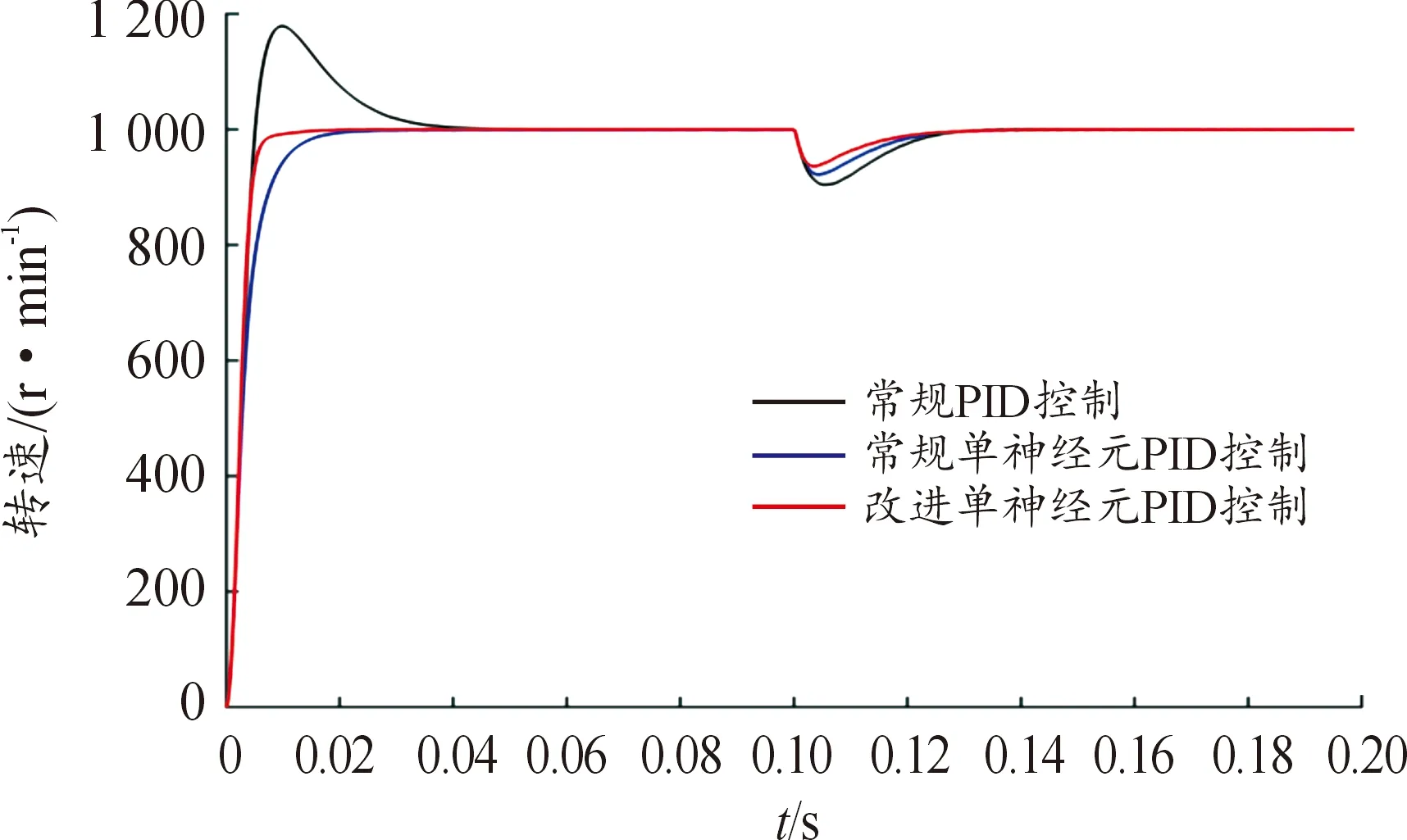
图6 负载改变下电机转速响应曲线
在0.1 s处突然增加负载转矩(图6),常规PID控制下转速下降约11.3%,单神经元网络PID控制下转速下降约9.6%;改进单神经元网络PID转速下降最少,约为7.1%。
图7为不同算法下负载突变时的力矩响应曲线。3种控制算法下,电机启动时都有明显的转矩突变,在t=0.1 s负载突变时,常规PID控制出现了较大的转矩脉动(约17%),且恢复稳定运行状态的时间也较长,约0.04 s。单神经元网络PID控制与改进算法在负载突变时,转矩脉动都很小,且改进单神经元网络PID算法下电机能够更快地进入稳态,约为0.01 s,改进前算法电机约0.02 s进入稳态。
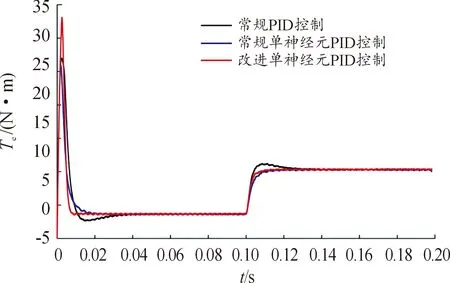
图7 电磁力矩响应曲线
为了进一步分析3种控制方式的控制效果,在仿真工况2的基础上绘制d-q轴电流响应的误差时序图,d轴、q轴的误差时序曲线如图8。
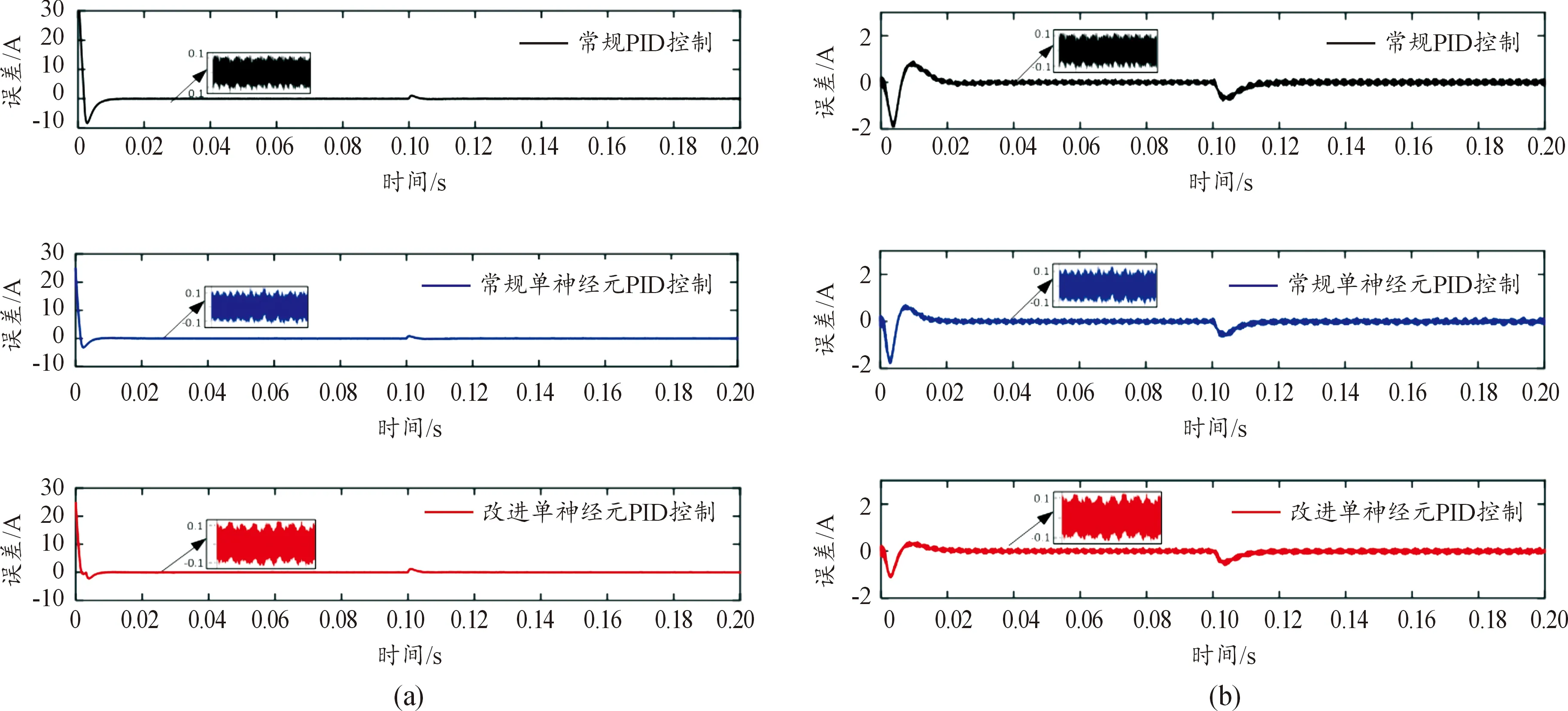
图8 d、q轴电流响应误差时序曲线
图8中,(a)为q轴电流响应误差曲线,(b)为d轴电流响应误差曲线。由图8可知,3种控制算法的电流误差变化趋势基本一致,d轴电流误差除了在电机启动时存在一定的波动以外,其余时间均在0 A值附近小幅度波动,波动幅值为±0.1 A;q轴电流误差与d轴电流误差类似,仅在电机启动电流迅速增大时出现较大变化,其余时间均在0 A值附近小幅度波动,范围也在±0.1 A。
同时,在负载扰动下,3种控制方法下d-q轴电流误差的变化均较小,且能够迅速回到误差0 A值波动范围内。但相对而言,在整个电流响应过程中,改进单神经元网络PID的误差波动更小,回到稳态的时间也更短,有更好的控制效果。
为更加直观地比较3种控制方法下d-q轴电流响应的误差情况,对图8中d-q轴电流误差数据进行RMS二次均方根运算处理,结果如表2所示。
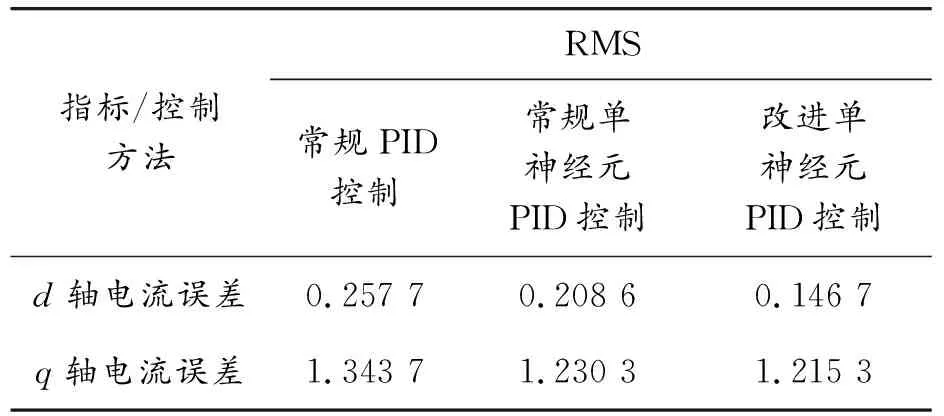
表2 d-q轴电流误差均方根值
综上,在3种轮毂电机控制算法中,改进单神经元网络PID控制相比于其他2种控制算法,在转速阶跃响应中达到稳态的时间最短,无超调量、运行更加稳定,且在负载突变条件下,改进单神经元网络PID控制转速下降最少、转矩脉动更小,达到稳态的时间也更短。同时,在改进单神经元PID转速环控制下,电机的d-q轴电流误差均比常规PID控制及改进前控制算法更小。
4 结论
基于车用轮毂电机矢量控制的模型进行分析,将最优控制理论中的二次型性能指标引入到单神经元网络PID控制中,改进单神经元网络PID控制算法,并将其应用到轮毂电机矢量控制的速度环中,并通过仿真对比分析该算法与常规PID、常规单神经元网络PID的控制性能,得出以下结论:
1) 针对轮毂电机这种非线性、强耦合的被控对象,常规PID控制效果不佳。相比于常规PID控制,改进单神经元网络PID控制在转速阶跃响应下具有无超调、更迅速到达稳态的优点,在负载扰动的情况下转速下降也更小。
2) 相比于常规单神经元网络PID控制,改进单神经元PID控制具有更高的响应速度,且在负载改变时,改进算法下的轮毂电机转速、力矩均能够以更快的速度达到稳态。
此外,在2种仿真工况下,改进单神经元网络PID控制下电机的电磁力矩脉动、d-q轴电流误差都较小,运行更加平稳。整个电机控制系统有较好的抗干扰能力和鲁棒性。
