废旧手机螺钉自动化拆解设备关键技术研究*
2022-06-16尹凤福王瑞东杜泽瑞庄虔晓
安 瑞 尹凤福 王瑞东 杜泽瑞 庄虔晓
(青岛科技大学机电工程学院 青岛 266061)
1 引言
现如今,手机更新迭代加快,淘汰的废旧手机数量与日俱增,关于如何处理废旧手机也已经成为了一个巨大的难题[1]。据工信部的数据显示,我国从2014 年至今,废旧手机存量累积约18.3 亿台。2019 年全国报废手机预计达到4.99 亿部,而随着5G 网络普及,2020 年废旧手机数量将增至5.24 亿台,将废旧手机回收并进行拆解利用是解决这个问题的重要办法[2]。
在手机回收后的拆解过程中,各类回收价值较高的元器件之间大都是通过螺钉进行固定,因此,螺钉的拆解在整个拆解过程中扮演着举足轻重的角色,且螺钉的拆解效率直接影响了废旧手机整机拆解的效率与所带来的经济价值[3]。
传统的手机螺钉拆解工艺,拆解设备相对落后,拆解手段原始等情况在很大程度上降低了手机拆解的效率。一般的人工拆解,对操作人员的熟练度要求较高,且受操作人员自身的状态的影响;机械化的拆解往往是利用电批外加人工操作,这样的拆解方式成本较大,经济性不高。
因此本文提出一种废旧手机螺钉自动化拆解设备,结合Halcon 图像处理软件,对螺钉孔视觉定位的图像处理算法方案进行了设计;同时针对螺钉拆解序列没有合理规划的问题,利用遗传算法对螺钉拆解序列进行了优化,并给出了螺钉拆解优化路径图。
2 系统方案
螺钉自动化拆解设备要实现适应不同型号手机的螺钉拆解工作,完成稳定精准快速的拆解,根据螺钉拆解的工艺流程,设计整体的工艺方案,可以分为机械执行系统、螺钉拆解系统、图像采集与处理系统以及集成控制系统[4]。机械执行系统主要包括三轴直接坐标机器人以及手机装夹机构,其中手机装夹机构是由电动夹爪配合特定夹具完成夹持的动作,且夹紧力可调;螺钉拆解系统主要由工业电批和电批治具组成;图像采集与处理系统包括工业相机、光源、工控机以及Halcon 图像处理软件组成。Halcon 是由是德国MVtec 公司开发的一套完善的标准的机器视觉算法包,拥有应用广泛的机器视觉集成开发环境[5~6]。
集成控制系统是通过“PC 机+固高GEN 系列EtherCAT 总线网络运动控制器+固高gLink 扩展IO模块+CCD 相机”开放式运动控制方法,PC 机作为控制系统的中心上位机,EtherCAT 总线网络运动控制器以及扩展IO 模块负责整个运动控制系统的完成,CCD相机用于运动坐标的提取与反馈[5]。
PC机发送螺钉拆解信号,gLink扩展IO模块传递信号对手机装夹机构执行加紧动作,CCD相机进行图像采集,将采集到的图像传输至PC机,执行图像处理算法获取螺钉孔的坐标,将坐标转化,通过EtherCAT 总线网络运动控制器发送给三轴直角坐标机器人进行移动,移动至坐标正上方位置后,再由gLink 扩展IO 模块发送信号至工业电批进行螺钉拆解。控制系统结构如图1所示。
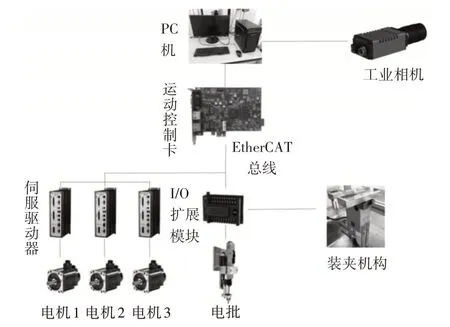
图1 控制系统结构图
3 螺钉孔位置图像处理算法研究
在相机采集的图像中迅速准确的确定螺钉位置的中心坐标,三轴直接坐标机器人才能够精准地进行定位,从而提高拆解的效率以及稳定性。因此,对螺孔位置的快速准确定位在整个自动化拆解过程中有着极其重要的意义[5]。对于手机内部螺钉分布而言,存在着小、密、精的特点,此外内部背景较为复杂,也对图像的分析处理有着很大的影响[5]。为了克服此困难,提出了将相机拍摄图片进行适度分割的方法,即通过绘制矩形ROI 区域(region of interest)将拍摄图片分割成部分图片并对目标图像进行分析与处理。这样可以极大地减小复杂背景的干扰,减少工作量,提高准确率。以小米4 手机为例,图2 为相机拍摄图片与绘制的矩形ROI 区域对比图。

图2 相机图片与ROI区域对比图
螺钉孔可以近似为圆形,对于直线、圆、椭圆、抛物线的分类检测通常采用Hough 变换法[7]。Hough 变换的主要优点是能容忍特征边界描述中的间隙,并且相对不受图像噪声的影响[5]。但其随着计算量以及参数个数的增加对计算机本身内存负担也越来越重,不适合进行大批量的实时检测[5,8~9]。因此本文针对手机螺钉拆解的特殊性,提出了如图3 所示的图像处理算法流程,通过标准的机器视觉算法包Halcon 软件,利用BLOB 形态学分析进行初次的粗定位,其次在亚像素精度下,提取粗定位区域的边缘,通过一系列的边缘像素点和圆拟合方程计算得到最接近的螺钉孔形状,从而完成二次的精确定位,提高了识别的鲁棒性以及准确性[5,10~11]。
相机启动抓取图像后,利用算子read_image 以及get_image_size 获取图像以及尺寸信息,调用draw_rectangle1 算 子,gen_rectangle 算 子 以 及reduce_domain算子将图像“分割”并显示,随后在“分割”后的目标图像内进行BOLB 分析,即首先调用算子threshold 进行图像阈值分割,然后调用算子closing_circle 或opening_circle 对阈值分割后的图像进行闭运算或开运算,随后调用算子connection对形态学处理后的图像进行提取连通分量,至此得到如图4 所示图像[12]。随后调用算子shape_trans,拟合最小外接圆,得到如图5 所示图像。至此,完成螺钉孔位置的初次的粗定位。

图4 进行BLOB分析后的图像
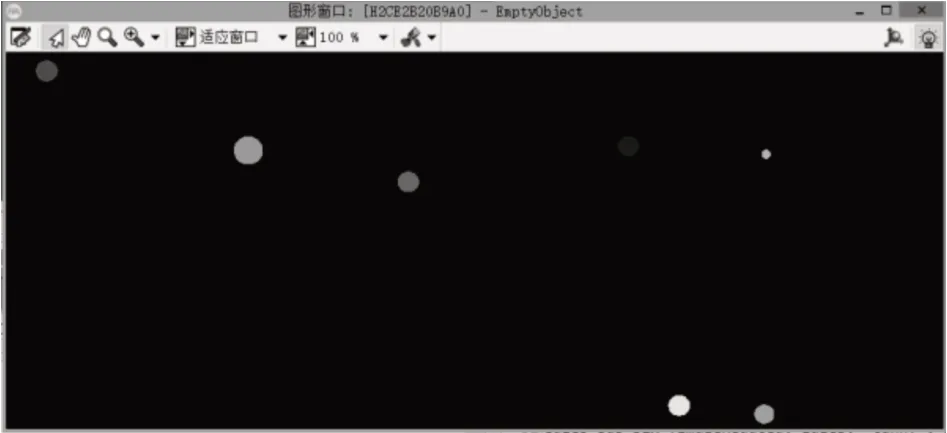
图5 调用shape_trans算子后所得图像
然后利用edges_sub_pix 和canny 算子对第一轮粗定位后的区域进行边缘检测,筛选出所有的边缘,接着用轮廓分割算子segment_contours_xld将轮廓分割为直线或者圆,再利用分割后轮廓的全局属性cont-approx 识别出所有的圆弧,利用fit_circle_contour_xld 算子拟合圆弧轮廓,同时添加半径筛选条件,最后通过gen_circle_contour_xld 算子重绘生成合条件的拟合圆,并展示在图像中[13]。如图6 所示为整体识别效果图,图7 为单个螺钉孔的识别效果放大图。
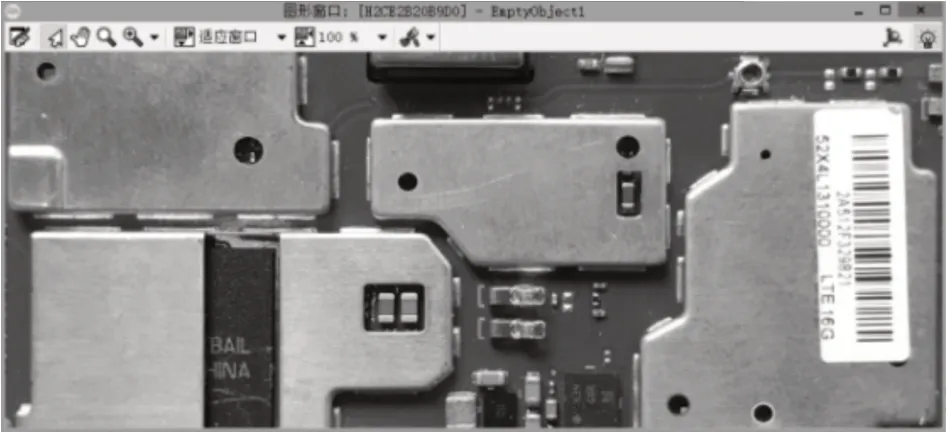
图6 整体识别效果图
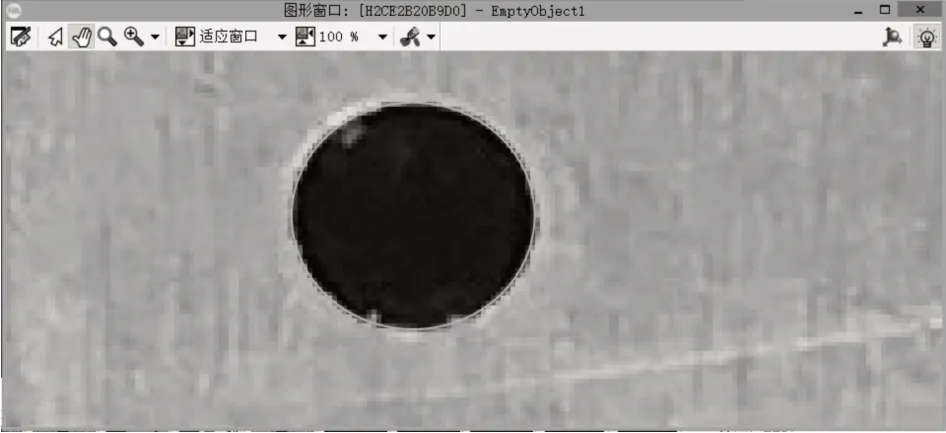
图7 单个螺钉孔识别效果放大图
4 拆解路径优化问题研究
螺钉的拆解序列是指由某个指定原点出发三轴直角坐标机器人依次移动至坐标位置执行螺钉的拆解工作,为了提高螺钉的拆解效率建立最优的拆解序列,就需要对拆解路径进行相应的分析优化[5,14]。螺钉拆解序列的问题关系到移动路径的长度,从而影响整个拆解过程的时长,而寻找这类问题的最优解就可以转化为TSP问题(旅行商问题),即寻找所用时间最短,总体的移动路径最短的拆解序列[5]。
4.1 TSP问题描述
TSP(Traveling Salesman Problem)问题,即旅行商问题。假设有一个旅行商人要拜访n 个城市,他必须选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。路径的选择目标是要求得的路径路程为所有路径之中的最小值[15]。对于此类问题,往往利用近似算法来求解,主要有遗传算法、模拟退火法、蚁群算法、禁忌搜索算法、贪婪算法和神经网络等[16]。
4.2 遗传算法
遗传算法(GeneticAlgorithm,GA)是通过模拟生物的进化过程来进行优化搜索的随机化搜索方法,它最早是由美国J.Holland 教授提出[5]。作为一种全局优化搜索算法,其主要特点是群体搜索策略以及群体中个体之间的信息交换,搜索模式并不以梯度信息为基础,具有简单通用,稳定性强的特点,尤其适用于难以用精确算法解决的非线性难题,已经成为求解TSP问题比较有效的方法之一[17]。
遗传算法的实现大致包括如下因素:确定初始群体、编码、设计适应度函数、设置控制参数、遗传算法操作、处理约束条件[5,18]。
编码是将所需解决问题变换至遗传算法的搜索空间内[5,19]。经过编码处理后就可以随机产生初始种群,若经过数学映射,可得到N 个初始串结构数据,而每个初始串结构数据可以视为一个个体,由此N 个个体便构成了一个群体。考虑到手机内部螺钉数量相较而言并不多,种群的多样性以及质量不会被较大影响,因此采用标准遗传算法随机产生初始种群。
进行设计变量:

进而产生染色体:

适应度函数是用来度量个体适应度大小的函数,适应度函数是操作选择的唯一依据,它关系到算法的收敛速度和最优解的寻找[5]。针对螺钉拆解序列优化的问题将适应度函数映射为途径全体螺钉孔中心坐标点后机械手移动的最短距离,即目标函数越小,种群中个体的适配值越大,因此是属于求解最小值一类的问题[5]。
假设将目标函数定义为f(x),适应度函数定义为Fit(f(x)),将f(x)转化Fit(f(x))并求解最小值,总结为以下三种方法:
其中,系数Cmax是f(x)最大值估计,一般是适当的相对较大的数。

其中,c为目标函数界限的保守估计值。
根据分析,选择如下适应度函数:
其中,(xi,yi)表示第i 个螺钉的位置坐标,(xi-1,yi-1) 表示的是第i-1 个螺钉的位置坐标,n 表示螺钉的数量,适应度函数可以理解为机械手拆解完第n 个螺钉后,再返回至起始待拆解螺钉的位置的距离的倒数,因此选择适应度函数值尽可能大的个体,值越大则表明个体的品质越好,反之越差。
4.3 手机螺钉拆解路径优化模拟
为了提高拆解的效率,缩短拆解的时间,现应用遗传算法对手机内部螺钉拆解路径进行模拟优化[5]。以荣耀6手机为例,创立直角坐标系,对手机内的螺钉位置进行坐标转化,转化后的坐标为[4.50;5.00];[21.00,4.50];[47.50,4.50];[63.00,5.50];[13.50,27.00];[21.50;57.00];[3.50,72.50];[4.50;113.00];[4.00;129.00];[37.00,141.00];[62.00,149.00];[21.50,103.00]。利 用Matlab 软件通过遗传算法输入坐标进行路径优化模拟,优化后的路径图如图8 所示[5],路线为1→5→6→7→12→8→9→10→11→4→3→2→1,其 总距离为413.1245mm,遗传算法进化过程图如图9所示。
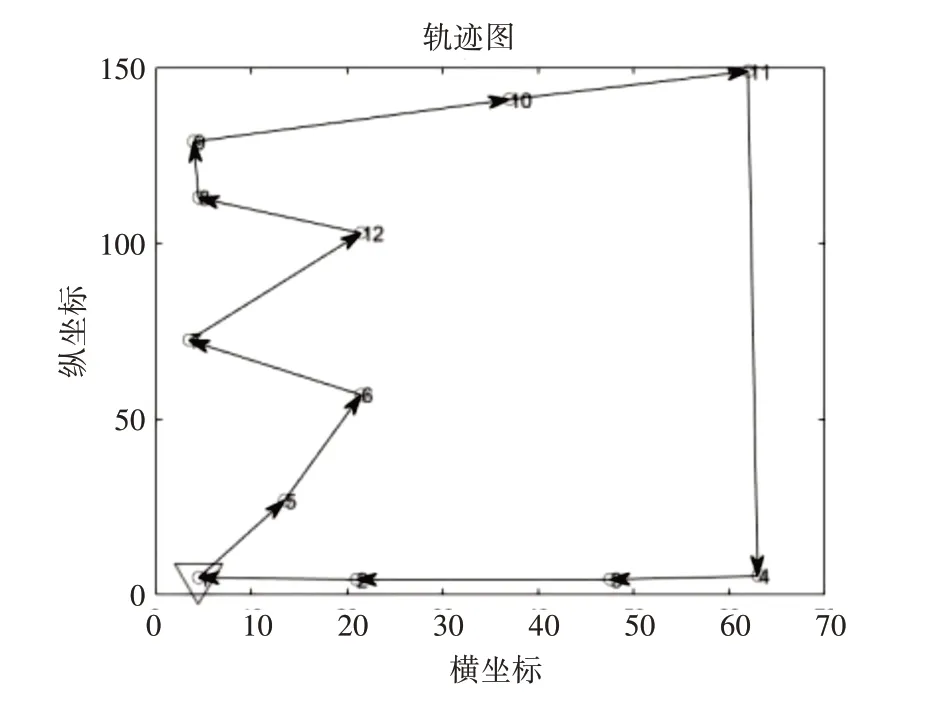
图8 路径优化图

图9 遗传算法进化过程图
5 结语
废旧手机螺钉自动化拆解设备目前在市场上类似的设备还未成熟,缺口较大,本文针对螺钉拆解工艺选择搭建了设备的硬件以及系统控制方案,针对视觉定位需求利用Halcon 软件设计了图像处理的算法方案,以及利用Matlab软件通过遗传算法对拆解路径进行了路径规划,结果表明遗传算法迭代到第18 代达到最优值,并确定出最优路线的总距离为413.1245mm。
