X频段地面站对星免校相自跟踪方法研究
2022-06-10盛保印


摘要:目前大部分航天测控地面站在X频段不具备有塔校相条件,且常用的对星快速校相等无塔校相方法受到多种因素限制。为了实现地面站对星免校相自跟踪,提出通过系统闭环方式校相对跟踪和、差链路的相对相位和相对增益变化进行监测,当跟踪链路受温度变化或设备组合更改导致相位和增益发生变化后,通过系统闭环校相来推算系统跟踪链路的相位和灵敏度系数用于对星免校相自跟踪。该方法可解决X频段地面站需要对星快速校相且校相受限制时无法采用自跟踪方式执行任务的问题。
关键词:测控站;双通道体制;X频段角跟踪;系统闭环校相
一、引言
航天测控地面站通常采用单脉冲双通道或三通道的跟踪体制,相比圆锥扫描跟踪体制具备天线增益利用充分、跟踪精度高以及动态性能好等突出特点[1],但是跟踪和、差链路的相对相位和相对增益易受环境温度变化、跟踪链路设备组合更改等影响而发生变化。如果不及时对跟踪和、差链路的相对相位和相对增益进行重新标定,则会引起跟踪时灵敏度下降并带入交叉耦合导致跟踪不稳定。X频段地面站相对S频段地面站来说工作频率更高,跟踪链路更易受上述因素变化的影响,因此需要更频繁地进行校相。
地面站传统的校相方法有对塔校相和无塔校相,天线口径为12米的X频段地面站在满足远场边界的条件下,标校塔需要建在距离站点大于9公里且高度大于450米,从成本和选址要求上考虑,已无法建设满足要求的标校塔[2],因此X频段地面站无法采用对塔校相。常用的无塔校相方法有射电星校相[3-5]、近场校相[6]和对星快速校相[7-8]。射电星校相采用射电星辐射的宽带噪声信号作为信标源,主要适用于天线增益高、系统噪温低的深空测控系统,一般地面站无法采用。近场校相可以选择在1/2远场条件下进行,但是仍需要建设标校塔,实际操作仍有困难。近年对星快速校相方法应用较为广泛,一定程度上解决X频段地面站的校相问题,目前船载测控系统经常采用的通过放飞搭载信标源的氢气球进行校相的方法也属于对星快速校相的一种[9]。但是X频段对星快速校相受中心计划、卫星数据下发时间、天气状况、轨道仰角等多种因素限制,不是每个圈次都可以对星快速校相,同时对星快速校相在天线拉偏校相过程中有丢失下行数传或遥测数据的风险。
目前大部分X频段地面站均存在需要校相但当圈次不满足对星快速校相条件时,当圈次无法采用自跟踪执行任务的问题。可见在非任务时间段如何对跟踪和、差链路的相对相位和相对增益的变化进行快速监测至关重要。
航天地面站一般会在天线主反射面内安装一个喇叭天线对准副反射面,此时系统可通过无线方式自闭环,平时用于测试收、发链路的状态和距离零值的校订。当喇叭天线发射信号时,地面站的跟踪和、差链路均能收到信号,这时利用跟踪接收机可以进行系统闭环校相,此时校相得到的数据无法直接用于对星自跟踪,但是通过前后两次系统闭环校相可以监测这段时间内跟踪和、差链路的相对相位变化和相对增益变化。
通过对校相原理和过程的分析得出系统闭环校相与传统校相之间存在固定的关系,当跟踪链路的状态发生变化后可通过系统闭环校相方式对跟踪和、差链路的相对相位和相对增益变化进行监测,根据这种固定关系推算出的地面站当前跟踪链路的相位和灵敏度系数应该能用于X频段对星免校相自跟踪执行任务。
二、可行性分析
(一)传统校相分析
在传统的有塔或无塔校相中,跟踪和、差信号分别表示为:
(1)
(2)
式中,Acos(wt+φ)为方位差信号,Esin(wt+φ)为俯仰差信号,φ为跟踪和、差链路的相对相位,当接收左旋信号时,±取+,右旋信号时,±取-。
以左旋为例,当跟踪接收机移相器中的初始相位值和灵敏度系数为θ0和k0时,差路鉴相器的参考信号中方位为k0cos(wt+θ0),俯仰为k0sin(wt+θ0)。經过鉴相及低通滤除高频分量后方位、俯仰角误差电压分别为:
(3)
(4)
以拉偏方位为例,当方位拉偏固定角度时,方位、俯仰差信号幅度为A1和E1,A1>>E1且E1≈0。校相的第一个目的即通过相位步进搜索法调整θ值使θ=φ,记为θ1,此时输出的角误差电压中Ua最大,Ue最小。第二个目的是找到相位后按照约定的灵敏度调整k值,记为k1,使天线偏开一个的角度时按照约定好的定向灵敏度出对应的角误差电压。将θ1和k1置入跟踪接收机即可实现地面站自跟踪。
如果θ1≠φ,则会出现交叉耦合,即方位拉偏时俯仰有角误差电压输出,俯仰拉偏时方位也有角误差电压输出,会导致跟踪不稳定甚至丢失目标。如果计算不准确,偏小则驱动能力不足出现高仰角动态滞后,偏大则出现过冲导致跟踪震荡。可见校相结果的准确性对系统的跟踪性能至关重要。
系统的φ值主要是由于馈源结构的不对称以及跟踪和、差链路中的微波电路、混频器、中频放大器的相位特性相互不一致引起的。灵敏度系数主要受跟踪和、差链路器件的增益或插损变化影响。跟踪链路中的射频有源器件及电缆的相位和增益或插损易受温度变化影响,当环境温度发生较大变化或跟踪链路设备组合发生变化时等均会导致φ值和灵敏度系数的变化。
假设因温度发生变化或跟踪链路组合更改导致跟踪和、差链路的相对相位和增益发生变化,相对相位增加量为Δφ,差路相对增益增加量为G。则式(3)、式(4)变为:
(5)
(6)
在校相完成后得到θ2和k2,则有:
(7)
(8)
通过式(7)和式(8)可以看出,只要可以通过一种方法得到跟踪链路的相对相位变化Δφ和相对增益变化G的具体结果,则后续无需再进行传统校相,将之前的校相结果按照式(7)和式(8)推算得出的数据即可用于地面站对星自跟踪。
(二)系统闭环校相分析
系统闭环校相如图1所示,在天线主面内安装一个喇叭天线模拟目标偏离的情况,喇叭天线与位于塔基的信号源通过一根射频电缆相连,信号源产生一个X频段射频信号送给喇叭天线后辐射至主天线内的副反射面,副反射面反射后信号由馈源网络进入下行跟踪和、差链路,经过信号放大和下变频后再送至位于塔基的跟踪接收机进行校相。
通过系统闭环校相得到的结果无法直接用于对星自跟踪,但是可以有效监测跟踪和、差链路的相对相位和相对增益的变化,并用于推算出系统跟踪链路的相对增益和灵敏度系数实现对星自跟踪。
该方法的具体过程如下:在对星快速校相前、后同时进行一次系统闭环校相,系统闭环校相结果为θ1'和k1',对星快速校相结果为θ1和k1。一段时间后因跟踪链路设备组合更改或温差过大导致跟踪链路状态发生变化时,此时不再用在进行对星快速校相,此时只需再进行一次系统闭环校相,校相结果为θ2'和k2'。则这段时间内跟踪和、差链路的相对相位变化Δφ=θ2'-θ1',相对增益变化G=k1'/k2',按照式(7)和(8)推算系统跟踪链路相对相位和灵敏度系数为:
(9)
(10)
将计算得到的θ2和k2置入跟踪接收机可用于X频段地面站对星免校相自跟踪的任务。
喇叭天线安装在主天线反射面内,不满足远场条件,系统闭环校相时受天线口面相差[10]和多径干扰的影响。但是本方法采用两次系统闭环校相来监测跟踪链路的相对相位和相对增益变化,从而推算系统当前的跟踪链路相对相位和灵敏度系数,因此口面相差的影响相对较小,图1中的虚线部分为多径干扰的示意途径,多径干扰的大小受喇叭天线安装位置的影响,因多径干扰引起的系统闭环校相结果的稳定性需进行试验验证。
三、试验验证情况
(一)方法可行性验证试验
在天线试验场搭建对塔校相和系统闭环校相的试验环境,在温度发生较大变化以及模拟更改跟踪链路设备组合的情况下,通过统计系统闭环校相和对塔校相的相位差值和灵敏度系数比值来验证利用系统闭环校相是否能有效监测跟踪链路的相对相位和相对增益变化。工作旋向为左旋、工作频点为9GHz,试验的具体过程如下:
(1)在满足远场条件的山上架设信标,天线指向信标按照传统校相方法校相,记录跟踪链路的相对相位θ1和灵敏度系数k1,将数据置入跟踪接收机并转为自跟踪验证数据的有效性;
(2)天线指向冷空,用系统闭环方法校相,记录校相结果为θ1'和k1';
(3)选择早、中、晚温差较大的时候,重复步骤1、2进行测试,验证随温度变化时该方法的可行性;
(4)温度变化试验验证时,同时通过在跟踪链路中串入一根射频电缆模拟更改跟踪链路设备组合的情况,重复步骤1、2,验证跟踪链路设备组合发生变化时该方法的可行性。
在试验场共进行了30组测试,温度范围在14℃~35℃之间,时间跨度为12天,中间有5组串入射频电缆。旋向为左旋,工作频率为9GHz,图2为两种校相方法在方位上的相位差值数据、图3为两种校相方法在方位上的灵敏度系数比值数据。
可见系统闭环校相与对塔校相的相位差值在92?~105?之间(±6.5?),灵敏度系数的比值k1/k1"在2.09~2.47之间,变化率约为±8.3%(以中间值2.26为基准)。系统闭环校相与对塔校相的相位差值和灵敏度系数比值均为一个相对固定的值,该试验同时验证了多径干扰对系统闭环校相的影响较小。
根据以往工程经验,X频段12米口径天线地面站系统对校相结果的容差为±15?,对灵敏度系数的容差为±12%,从实验结果看在X频段采用系统闭环校相监测跟踪和、差链路的相对相位和相对增益变化推算出的系统当前跟踪链路相对相位和灵敏度系数的准确度在地面站自跟踪要求范围内。
(二)无人机跟飞验证试验
为了验证通过系统闭环校相方式推算出的系统当前跟踪链路相对相位和灵敏度系数能否用于X频段地面站对星自跟踪,在天线试验场接着利用无人机进行了跟飞验证试验,试验中工作旋向为左旋、工作频点为9GHz。试验的具体过程如下:
(1)在满足远场条件的山上架设信标,信标安装在无人机云台上。天线指向信标后,按照传统校相方法校相,记录跟踪链路的相对相位θ1(136 ?)和灵敏度系数k1(1.86),将数据置入跟踪接收机后,天线转自跟踪模式验证校相数据的有效性;
(2)天线指向冷空,用系统闭环方式进行校相,记录校相结果为θ1'(33?)和k1'(0.86);
(3)在链路中串入一根射频电缆模拟跟踪链路相对相位和相对增益发生了变化,此时再次进行系统闭环校相,得到校相数据为θ2'和k2';
(4)按照式(7)和(8)根据θ2'和k2'推算系统的相对相位θ2和灵敏度系数k2,将推算数据置入跟踪接收机,利用无人机验证跟踪性能并统计跟踪精度;
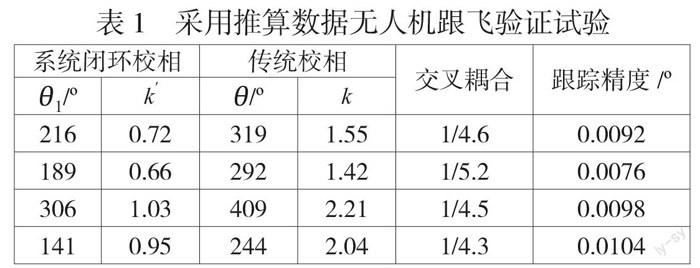
试验中在早、中、晚温差较大时依次进行了4次串入电缆验证试验,无人机跟飞情况见表1。
从无人机跟飞验证试验数据可以看出,采用系统闭环校相推算出的系统跟踪链路相对相位和灵敏度系数可以实现在X频段地面站不对无人机信标进行校相的情况下实现对無人机的自跟踪,交叉耦合小于1/4且跟踪精度满足≤0.02?的指标要求。
在该设备进站安装完成,系统联试期间采用与无人机跟飞试验类似的过程进行了对星跟飞验证,用推算的校相结果进行跟星,整个跟踪过程稳定,拉偏后交叉耦合较小,跟踪精度满足指标要求。
四、结束语
系统闭环校相不受天气和中心计划的影响,适应性较好,同时避免了在任务中对星快速校相带来的数据丢失风险。针对X频段航天测控地面站,通过系统闭环校相推算系统跟踪链路的相位和灵敏度系数用于对星免校相自跟踪可行且跟踪精度满足指标的要求。后续考虑从以下方面做进一步研究:
(1)对该方法进行持续优化,利用地面站自带的监控系统对系统闭环校相流程进行自动化处理,减少岗位人员的参与程度,提高本方法的便捷性和实用性,使之更能适应当前地面站繁重任务的需求。
(2)Ka频段频率高,受多径干扰影响更大,对馈源网络的稳定性要求更高,后续可就本方法在Ka频段的可行性做进一步验证。
作者单位:盛保印 西南电子技术研究所
参 考 文 献
[1]刘冰,陆人佳.统一测控系统跟踪在轨目标自动校相方法研究[J].遥测遥控,2010,31(1):37-40.
[2]尚建忠,王青松, 王新宏.一种基于误差电压比例记忆的无塔校相方法[J].电讯技术,2015,55(9):1014-1018.
[3]汪远玲,仇三山,汪晓燕.深空系统低信噪比任意信号角跟踪接收机[J].电讯技术,2008,49(4):45-48.
[4]刘嘉兴.利用射电星噪声的无塔校相方法[J].电讯技术,2010,20(6):1-3.
[5]李蝉,刘敏,于益农.深空测控系统中的射电星校相方法[J].飞行器测控学报,2009 28(6):28-30.
[6]苏勋,席文君.双通道跟踪接收机对地校相技术[J].电讯技术,2012,52(3):268-272.
[7]李珂.一种双通道角跟踪的快速校相方法[J].电讯技术,2007,47(6):99-101.
[8]仇三山.双通道单脉冲跟踪快速校相改进算法[J].四川兵工学报,2013,34(5):96-98
[9]瞿元新,毛南平.船载X频段微波统一测控系统快速校相方法[J].遥测遥控,2014,35(2):69-72.
[10]李蝉,刘敏,于益农.口面天线无塔校相方法[J].电讯技术,2009,49(8):73-75.
