甘蔗收获机站秆式收割系统设计与仿真分析
2022-06-10江佳运陆静平
江佳运,陆静平
(广西大学 机械工程学院,广西 南宁 530004)
0 引言
收割系统是甘蔗收获机的重要组成部分,其优劣直接影响甘蔗的收割质量以及输送和除杂效果[1]。当前,市场上大部分收获机采用的是“压倒-切割-提升输送”的推倒式收割方式[2],即通过压蔗装置把甘蔗推倒后,刀具对根部进行切割,刀盘上的螺旋机构再将甘蔗提升输送。国外一些制糖工业发达的国家,由于甘蔗种植地广阔平坦,加上糖厂先进的榨糖技术,能够较好地适应推倒式收割方式。而在我国的甘蔗种植环境下,推倒式收割存在着一系列的问题[2]。首先,甘蔗推倒后容易连根拔起,影响甘蔗的切割质量,且对来年甘蔗的发芽发育造成影响;其次,切割拔起的甘蔗无反向压力致使刀具割入土层增大刀具切割的阻力,也加剧刀具的磨损;除此之外,切割后的甘蔗通过底盘提升装置输入辊筒时较控制而使大量甘蔗在窄小的空间内集结,容易造成机器堵塞。针对推倒式收割存在的弊端,本研究进行甘蔗收获机站秆式收割系统的设计,使甘蔗在直立状态下刀盘紧贴地面切割,以期能达到提高甘蔗切割质量和避免机器堵塞的收割效果。
1 整体结构与工作原理
甘蔗站秆式收割系统如图1所示,主要有拨杆机构、双圆盘切割器和输送通道等结构组成。底部为切割器,支撑杆件安装在刀盘上方,拨杆安装在拨盘上形成拨杆机构,由液压马达驱动其绕拨盘轴转动。每侧安装两个拨杆机构以增大对甘蔗的作用效果,并且两侧成对称状态。与拨杆机构相连的是输送通道,其设计成以链条传动为动力的输送机构,链条安装在输送通道两侧,并且有数根钢条依附在链条上随其传动,甘蔗可在钢条的支撑下随着链条传动送至喂入辊筒中。

图1 站秆式收割系统结构示意图
收获机工作时,在两侧拨杆往回转动的作用下使得甘蔗往里收拢,甘蔗便与支撑杆件接触,甘蔗在受到支撑杆件与拨杆拉动的共同作用下达到一个相对稳定的状态,此时底部的刀盘紧贴地面并对甘蔗根部进行切割,切割后的甘蔗在拨杆的回拉以及收获机往前行驶的共同作用下,甘蔗顺势落入收割系统的输送通道中,进而输送进入喂入辊筒里面,至此完成甘蔗的收割部分工作。
相较于推倒式收割而言,站秆式收割避免了甘蔗因单向受力而产生的根部损伤现象,由于甘蔗在夹持状态下切割,因此刀具可以在不入土情况下工作,切割后的甘蔗落入到开放式的输送通道中,能够很大程度地缓解了收获机的机器堵塞问题。
2 虚拟样机仿真分析
2.1 仿真模型的建立
收割系统三维模型在Solidworks建立后导入到ADAMS中。甘蔗三维模型在Ansys中建立后选择单元类型为20节点的结构单元solid186,设置材料密度为1 100 kg/m3,弹性模量为1.1×1011Pa,泊松比为0.33,并进行六面体网格划分后导出mnf文件到ADAMS中[3],与收割系统形成刚柔耦合模型。
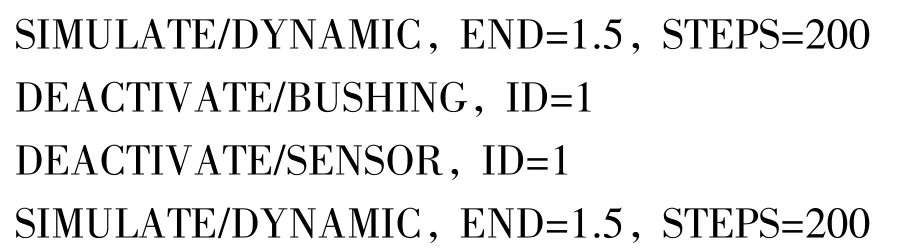
在ADAMS中,设置整个机构与地面形成移动副并根据实际工作情况添加0.5 m/s的平移驱动,设置拨杆机构与机架形成转动副并添加旋转驱动,设置甘蔗与机构零部件的接触力[4]。甘蔗与地面的连接效果通过设置轴套力替代,当刀盘与甘蔗产生接触时使轴套力失效替代甘蔗被切割的效果,如图2所示,ADAMS中在刀盘中心和甘蔗根部建立一个Marker点,利用传感器判断两个Marker点的距离为接触状态时使轴套力失效,若刀盘直径为R,甘蔗半径为r,当l=R-r时使得轴套力失效,则传感器设置为DX(Marker_1,Marker_2)=R-r时终止当前仿真并继续脚本仿真。整个过程中设置仿真时长为1.5 s,步长为200,利用脚本进行仿真,仿真脚本为:
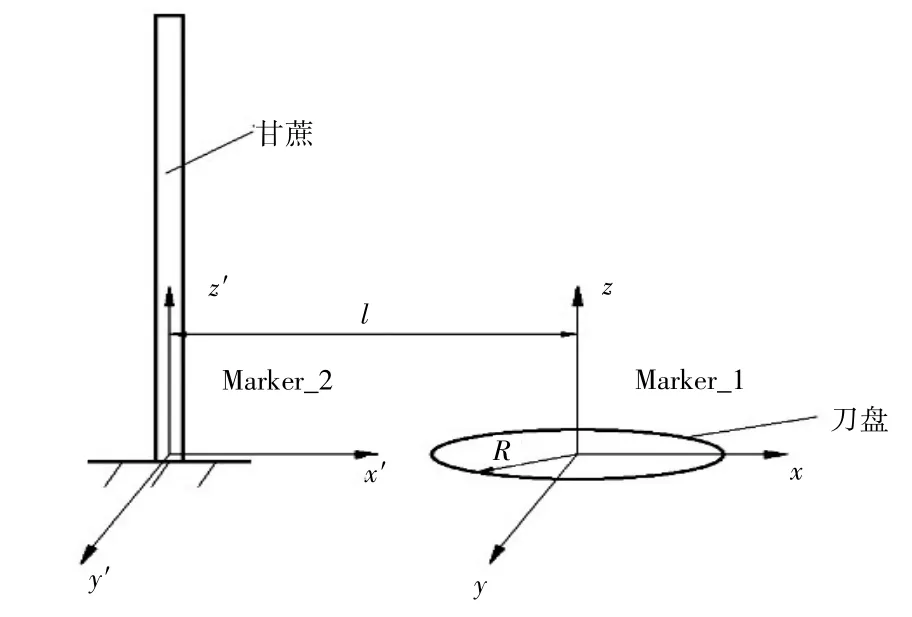
图2 甘蔗与刀盘Marker点的建立
轴套力失效后,拨杆回拉过程中,观察在甘蔗与收割系统零部件的接触力的作用下其运动效果,观察其是否能够顺利落入系统的输送通道中。
2.2 收割过程仿真分析
为了便于分析仿真过程,在不影响仿真结果的前提下简化整个收割系统。拨杆对甘蔗的作用运动效果影响最大,因此设置不同的拨杆转速,找出甘蔗能够顺利落入输送通道的参数,拨杆转速为40~120 r/min,车速设定为0.5 m/s,得到的结果见表1。
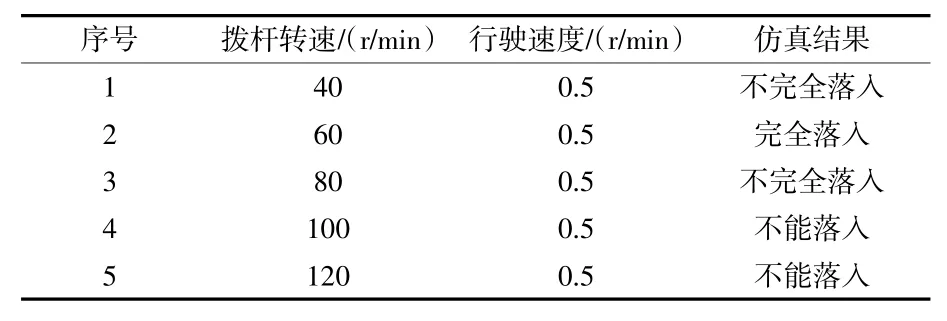
表1 仿真条件及结果
当行驶速度为0.5 m/s,拨杆转速为60 r/min时甘蔗能够顺利落入输送通道,收获仿真过程如图3所示。收割前甘蔗通过轴套力连接直立在地面上,随着收割系统前进和两侧拨杆旋转回拉的作用下甘蔗处于一个被夹持的状态,此时底部刀盘进行根部切割使得甘蔗与地面轴套力失效,甘蔗顺势落入输送通道,在输送通道的传送中甘蔗进入剥叶箱完成收割工作。
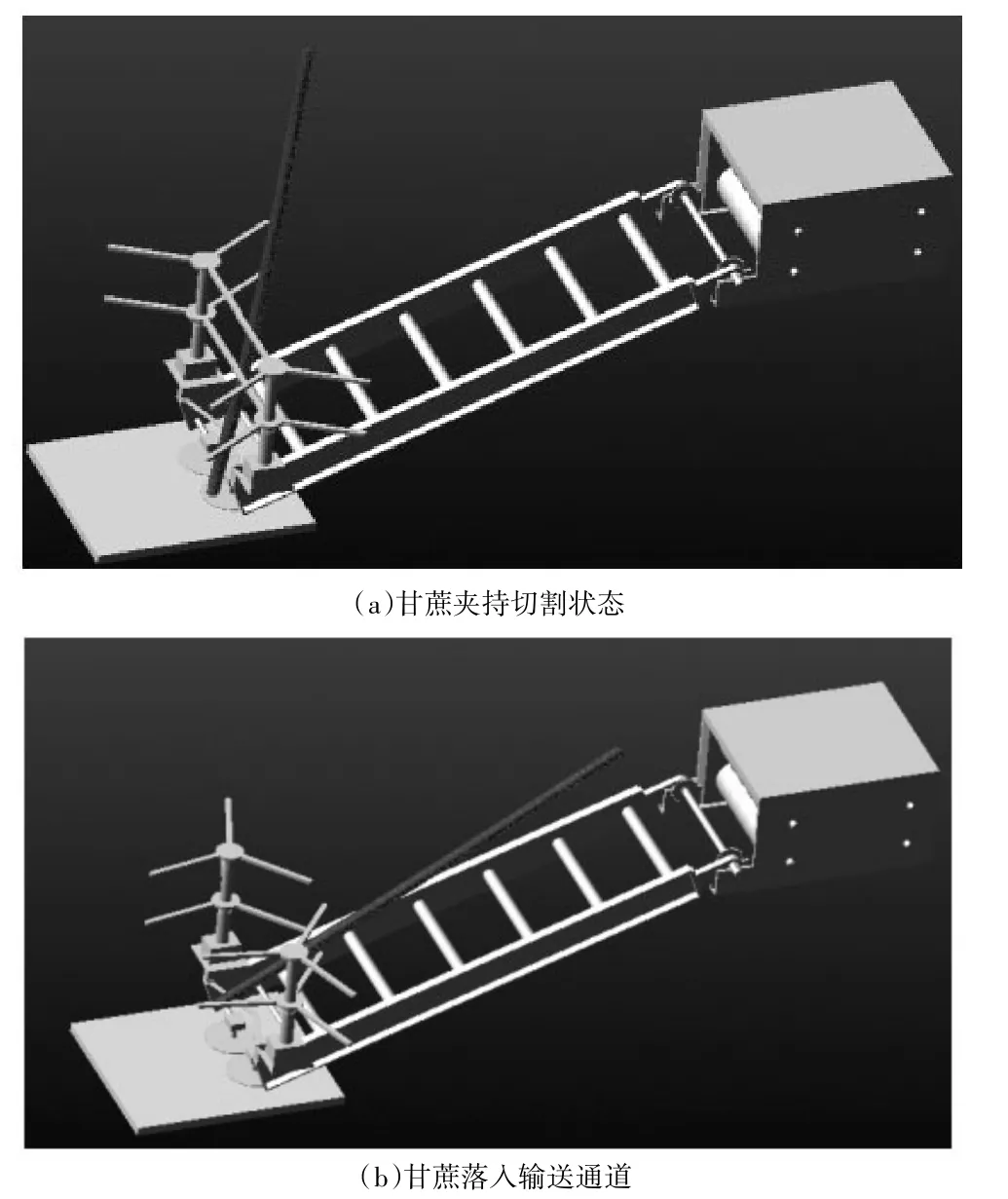
图3 甘蔗收获仿真过程
收割系统工作时,甘蔗质心的位移主要经历拨杆回拉—落入通道—输送提升三个阶段,甘蔗柔性体质心在竖直方向的位移变化曲线如图4所示。拨杆随着收获机作前进运动,并且绕着拨盘中心作旋转运动,拨杆端点在车辆行驶方向位移变化曲线如图5所示。
通过观察甘蔗质点曲线变化,可以看到在0.9 s处甘蔗质心开始下降,在0.9~1 s处下降相对缓慢,1~1.15 s迅速下降,之后1.15~1.5 s呈上升趋势。根据分析可得0.9 s时拨杆与甘蔗接触,在拨杆的回拉作用下甘蔗轻微摆动使得质心向下,1 s时由于甘蔗根部切割后落入输送通道中质心下降到最低,1.15 s后随着输送通道向上运输,质心位置开始呈现上升趋势。观察拨杆端点的曲线变化可得拨杆回拉时间区间为0.8 s~1.2 s,由拨杆为匀速转动可得1 s时拨杆正处于夹持甘蔗位置,而1 s的时间点恰是甘蔗质点迅速下降的时间,由此可得拨杆在对甘蔗夹持状态下完成甘蔗根部切割,甘蔗随之落入到输送通道中,符合甘蔗收割的要求。
3 结束语
针对传统甘蔗收获机推倒式收割存在的问题,提出了一种采用站秆收割方式的甘蔗收割系统,对其结构组成与工作原理进行了阐述,并在ADAMS中建立甘蔗收割的刚柔耦合模型,通过仿真实验得到了在行速度为0.5 m/s,拨杆转速为60 r/min的条件下,甘蔗能够顺利地落入输送通道进入剥叶箱中。通过对甘蔗质心的运动曲线和拨杆端点的运动曲线的分析,得到的结论是:拨杆机构对甘蔗的作用效果符合收割的要求,收割系统具有技术可靠性。
