基于功率曲线时域特征和变分模态分解的S700K转辙机运行状态诊断算法
2022-06-09魏文军武晓春
魏文军,李 政,武晓春
(1.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2.兰州交通大学 光电技术与智能控制教育部重点实验室,甘肃 兰州 730070)
S700K转辙机作为实现线路转换的关键设备,广泛应用于高速铁路中的提速道岔,其若发生故障,将会严重影响高速列车行车安全[1]。道岔动作过程由室内控制电路和室外动作设备共同作用完成,为保障道岔正常动作,铁路部门主要采用故障维修和计划检修2种策略,但这2种策略也存在着检修过剩、维修经验不足和安全风险大等问题[2]。如果能对S700K转辙机在整个运行周期内的运行状态进行实时监控与诊断,在故障发生前及时检修,在故障发生后及时定位并维护,则可大大提高道岔检修和维护的效率,降低因转辙机故障而导致列车事故的概率。近年来,已有大量关于S700K转辙机智能故障诊断的研究[3−6],但主要集中在故障发生后的问题分析定位等方面,关于转辙机整个运行周期内的状态诊断研究则相对匮乏。
为实现S700K转辙机在整个运行周期内的状态诊断,首先需要提取反映其状态的信号特征,然后基于特征信息进行运行状态诊断分析。在特征提取方面,杨菊花等[7]对S700K转辙机电流和功率曲线进行哈尔小波变换,然后与原始数据组成原始特征矩阵,再经BP神经网络训练实现特征矩阵的降维,但训练参数选择困难,同时输入曲线受迭代次数的影响,运算速度较慢。黄世泽等[8]选用几种典型曲线,利用弗雷歇距离定义相似度函数,将样本曲线之间的相似度作为特征信息,但对典型曲线的要求较高,信号特征单一。申中杰等[9]提出利用不受个体差异影响的时域特征相对均方根值作为特征指标,但存在信号提取不充分,不能体现信号之间细小特征的问题。
在运行状态诊断方面,陆桥等[10]提出基于灰色关联分析的转辙机故障诊断方法,受转辙机个体差异和外部环境的影响,存在门限值选择困难、实用性差等问题。许庆阳等[11]根据转辙机连续运行功率数据特点,提出利用隐马尔科夫模型建立转辙机故障类型映射数据集,但需要大量关于转辙机正常和故障的监测数据,而现场中转辙机故障的实际监测数据很少。
利用变分模态分解 (Variational Mode Decom⁃position,VMD)可提取得到滚动轴承振动信号故障信息[12]。与哈尔小波变换、弗雷歇距离定义相比,该方法在状态特征提取中具有自适应强、运算速度快,特征提取充分等优势。排列熵(Permuta⁃tion Entropy,PE)是衡量信号复杂度的方法,对信号突变敏感,已成功应用于航空发动机、变压器等设备的振动信号特征提取[13−14]。将VMD和PE相结合,能够有效提取设备的S700K转辙机功率曲线的细小状态特征。建立在统计学理论基础的模糊聚类分析,能够利用所提取样本特征间的相似度实现小样本数据分类,现已成功应用在电力等行业的设备状态诊断中[15−16],在转辙机运行状态诊断时可借鉴采用该方法。
本文提出关于S700K转辙机运行状态诊断算法:首先,从信号集中监测设备中获取S700K转辙机功率曲线,计算信号序列的有效值、峰值因子和峭度因子,并将其作为时域特征值;然后,利用VMD算法进行原始信号频域分解,并结合排列熵算法计算不同模态分量函数,得到4个频域特征值;最后,将S700K转辙机在不同运行状态下的时、频域7个特征值组成特征数据集,并作为输入矩阵进行模糊聚类分析,实现S700K转辙机全周期运行状态(正常、亚健康、故障和严重故障)诊断。以现场实例进行验证分析,该算法能够有效诊断S700K转辙机的运行状态。
1 状态诊断算法
1.1 VMD算法
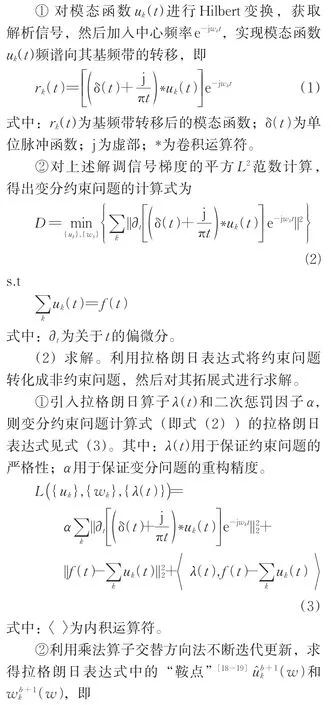
VMD算法是最早由Dragomiretskiy等人提出的自适应信号处理方法[17],在一定约束条件下,通过不断迭代更新模态函数的中心频率和有限带宽,实现原始信号频率的有效分解。与经验模态分解(EMD)相比,VMD解决了模态混叠的问题,具有较强的鲁棒性。VMD的分解过程可分为变分约束问题构造和求解2大步骤,具体如下。
(1)变分约束问题构造。假设k为分解后模态函数的个数;t为原始信号的时间变量;u(kt)为模态函数,每个模态函数的中心频率为wk,有限带宽为D。变分约束问题可描述为模态函数分量的有限带宽之和最小,并且各模态函数分量相加等于原始信号(ft)。
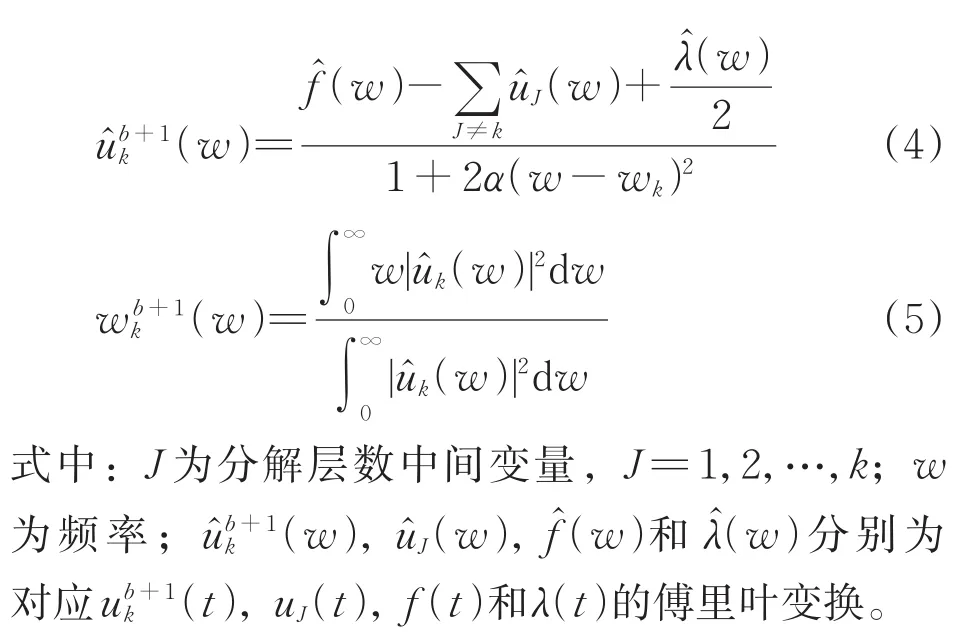
VMD算法的求解流程如图1所示。图中:b为迭代次数。求解时,通过式(4)和式(5)的“鞍点”更新模态分量uk(t)和中心频率wk,中间变量拉格朗日算子λ(t)也随之不断更新。最终,在噪声容忍度为σ、收敛精度为ε下,获取k个带宽之和最小的模态函数分量。
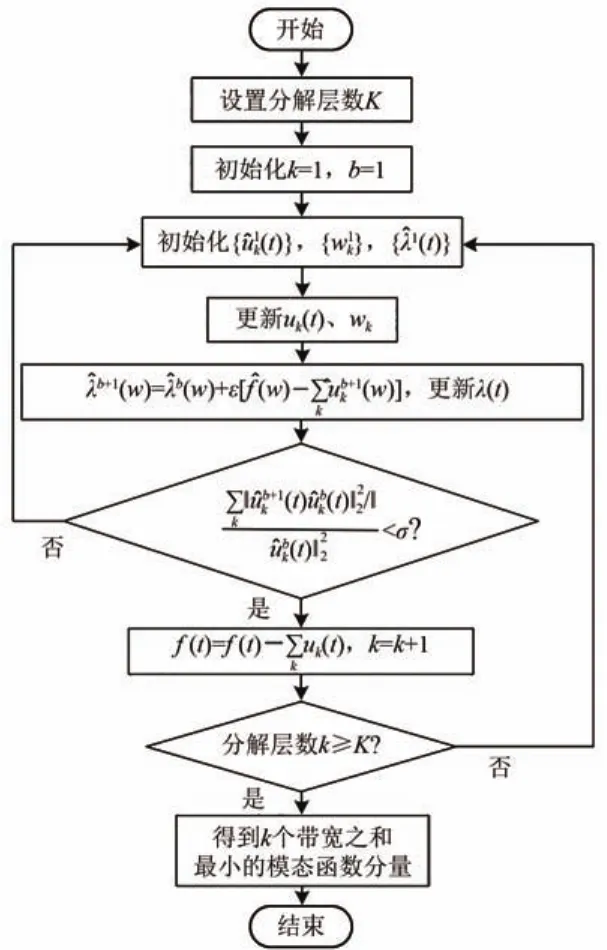
图1 VMD算法流程图
1.2 排列熵(PE)
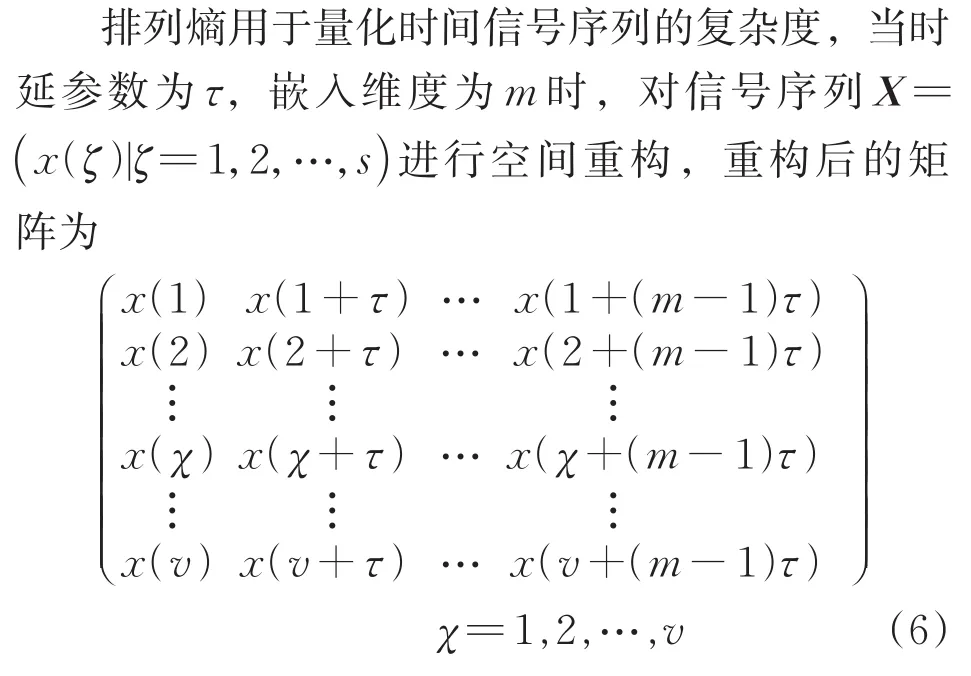

从熵值的定义可知:熵值越大,表示信号序列越复杂;熵值越小,表示信号序列越不规则。
在实际应用中,时延参数τ、嵌入维度m的选择对计算量和计算精度有影响,为提供信号序列有效特征信息。根据文献[20]取采样序列s≥5m!。监测中心对S700K转辙机的采样周期为40 ms,采样序列s等于采样时间除以采样周期,以S700K转辙机正常运行为例,采样时间为7 s,则采样序列s为175,m取值为4,τ一般小于2。
1.3 模糊聚类分析
采用传递包算法建立S700K转辙机运行状态诊断模型。首先利用研究对象的特征指标构建初始模糊特征矩阵;然后为消除不同量纲之间的影响,对其进行标准化处理;之后引用指数相似系数法构建模糊相似矩阵;最后当模糊等价矩阵中置信因子ϖ从大到小变化时形成动态聚类图。具体算法步骤如下。
1)步骤1:建立初始模糊特征矩阵Y
设论域U={y1,y2,…,yr}为S700K转辙机r个不同运行状态,每个运行状态下有q个指标表征其特征,即

由此,可将初始模糊特征矩阵表示为
2)步骤2:模糊特征矩阵标准化处理Y″
在实际应用中,为实现不同量纲指标之间的数据比较,需要对初始模糊特征矩阵进行标准化处理,使得矩阵数据落到区间[0,1]上。变换方式由以下2步完成。
(1)标准化,计算式为
(2)极差化,计算式为
3)步骤3:构建模糊相似矩阵R
为定量描述样本之间的相似程度,引用聚类统计量来计算数量指标,通常用于聚类统计量的计算方式有:夹角余弦法、海明距离法、切比雪夫法以及指数相似系数法等方法。本文选用对细小特征敏感的指数相似系数法建立模糊相似矩阵,即
对模糊标准矩阵Y″中计算不同行之间的聚类统计βiφ,其中i和φ为模糊标准矩阵所在行数,并以聚类统计βiφ建立模糊相似矩阵R。
4)步骤4:形成动态聚类图
上述建立的模糊相似矩阵不一定具有传递性,为实现聚类分析,采用传递包算法建立模糊等价矩阵R*。在模糊相似矩阵R中,当经过次传递包计算后,使得。其中利用平方法计算传递包,即

模糊等价矩阵R*具有传递性,当其中的聚类统计量βiφ随置信因子ϖ∈[0,1]从大到小变化时,由式(16)形成动态聚类图。

当置信因子由1到0变化时(计算机自动按0.001的步长减小),针对动态聚类图中故障库(已知状态类型)和测试库的聚类情况,通过自动匹配分类样本集和测试集中的曲线类型,进而实现S700K转辙机运行状态诊断的目的。
2 转辙机运行状态诊断方法
S700K型转辙机在转换过程中,输出功率P与转辙机推力F之间的关系为

式中:Re为等效力臂,N·m−1;n为转速,r·s−1;η为转换效率,%。
根据S700K转辙机型号可知其电机的等效力臂,转速和转换效率为定值,由式(17)得到其输出功率和推力间呈正比关系。由此判定:S700K转辙机动作功率曲线特征与转换过程的运行状态具有一致性,体现着其机械性能,是状态诊断的重要指标;同时S700K转辙机功率曲线具有非线性、非平稳的特点;每1种运行状态下的动作功率曲线特性也不相同。因此可将其功率曲线用于状态诊断。
功率曲线的有效值体现了其能量特征,曲线波动越大,对应的值越大;峰值因子用于衡量曲线冲击特性,检测曲线峰值;峭度因子描述了信号序列的概率密度,用于对比曲线异常持续时间。因此选取S700K转辙机在不同运行状态下的典型功率曲线,计算其有效值、峰值因子和峭度值3个因子作为时域特征值。对于时域特征不明显的曲线,利用变分模态分解算法进行频域分析,并将4个不同模态函数的排列熵作为频域特征值。以时、频域共计7个特征值进行模糊聚类分析,能够实现S700K转辙机的运行状态诊断。诊断过程如图2所示。
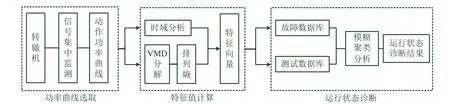
图2 S700K转辙机运行状态诊断示意图
由图2可知,S700K转辙机状态诊断流程主要由功率曲线选取、特征值计算和运行状态诊断3步组成。具体如下。
1)功率曲线选取
通过监测流过启动继电器(1QDJ)的电压和电流实现对S700K转辙机功率曲线的采集,将S700K转辙机运行状态分为正常、亚健康、故障和严重故障4种;在每种运行状态下,按照转辙机的故障程度和动作异常阶段选取典型样本功率曲线;经整理每种运行状态下有多个典型样本功率曲线,由此来建立故障数据库。
2)特征值计算
以信号序列X={x(ζ)|ζ=1,2,…,s}表示1条针对S700K转辙机的功率曲线,其有效值μ1、峰值因子μ2和峭度因子μ3计算式分别为
对功率曲线进行频域分析时,利用VMD算法将功率曲线分解为4个具有不同频率特征分解分量,并计算每1模态函数分量的排列熵,用于描述每1层分解分量的信号复杂度。
3)运行状态诊断
经时域、频域分析将其7个特征值作为对应功率曲线下的特征向量,将测试曲线和故障数据库中典型样本功率曲线进行模糊聚类分析,实现S700K转辙机运行状态诊断。
3 实例计算与分析
3.1 S700K转辙机功率曲线
以兰州铁路局集团有限公司信号集中监测中心关于S700K转辙机功率曲线的历史样本数据为例,在正常运行状态下,动作功率曲线分为解锁、转换和锁闭3个阶段;亚健康运行状态下,动作功率曲线开始出现振动和不平稳现象,但能够完成转换;故障状态下,转辙机完成转换后,无法正常表示功率曲线;在严重故障状态下,转辙机无法完成正常转换。
以不同运行状态下的典型样本功率曲线建立故障曲线库,如果测试曲线在故障曲线库中没有记录,则将其作为样本曲线加入库中,比如,1条新的测试曲线对应的状态是1种亚健康,则将其命名为“亚健康3”加入库中。S700K转辙机全周期运行下的典型样本功率曲线如图3所示,对应分析见表1。
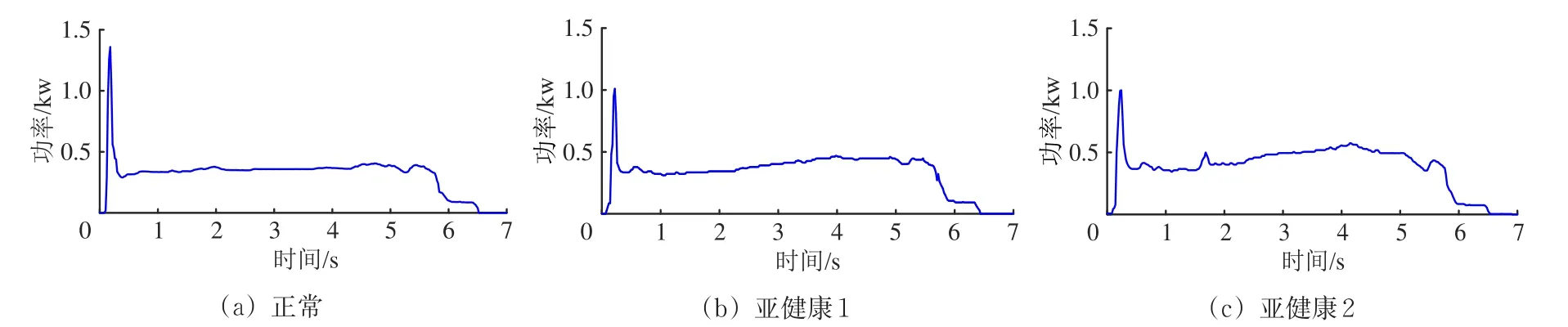
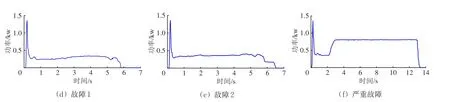
图3 S700K转辙机典型样本功率曲线

表1 S700K转辙机典型样本功率曲线分类及其特征
3.2 功率曲线的时域特征值计算
对图3所示的6种典型样本功率曲线进行时域分析,即采用式(18)—式(20)分别计算其3个时域特征值,结果见表2。定义指标数值之间的相差阈值超过±1时,认为曲线之间有显著差异;每种功率曲线至少要有1种特征值之间的相差阈值超过±1,后续的状态诊断算法才能有效进行。从表2可知:部分运行状态间的特征值相差阈值超过±1,时域特征差异较为明显;部分运行状态间的时域特征差异不明显,如表中的“正常”状态和“故障2”状态。对于时域特征值差异不明显的功率曲线,仅采用时域特征值对转辙机状态进行模糊聚类诊断,则可能造成诊断错误,因此还需要引入频域指标。
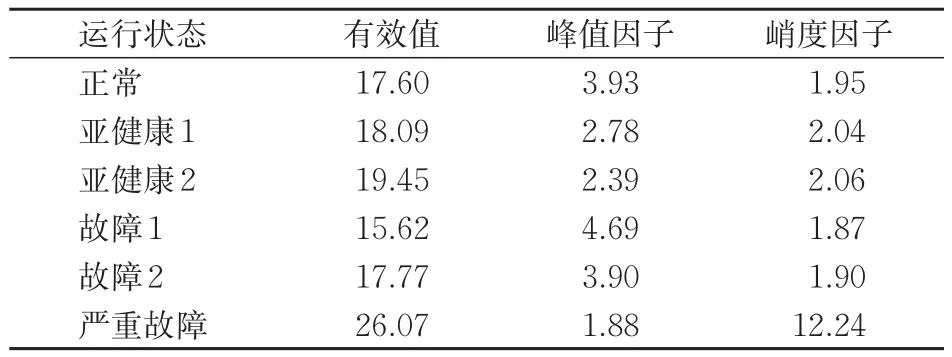
表2 典型样本功率曲线时域特征值
3.3 功率曲线的频域特征值计算
采用VMD算法进行频域分析,并结合排列熵算法表征其特征值。在进行VMD分解之前,需要先确定分解层数K和惩罚因子α。参考文献[21]选取分解层数方法,对“亚健康1”状态下的功率曲线进行局部均值分解(LMD)后,分解后得到5个乘积函数分量(Product Function,PF),以具有明显波动信息的分解分量作为分解层数,分解结果如图4所示。
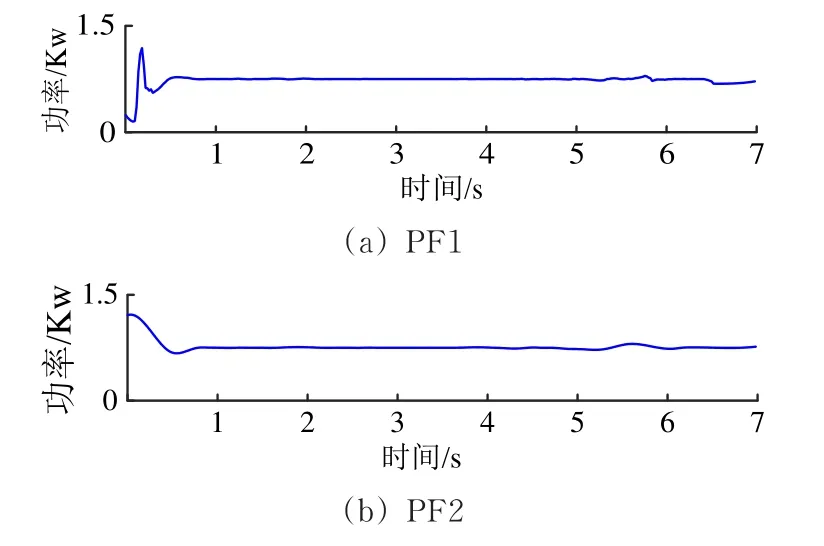
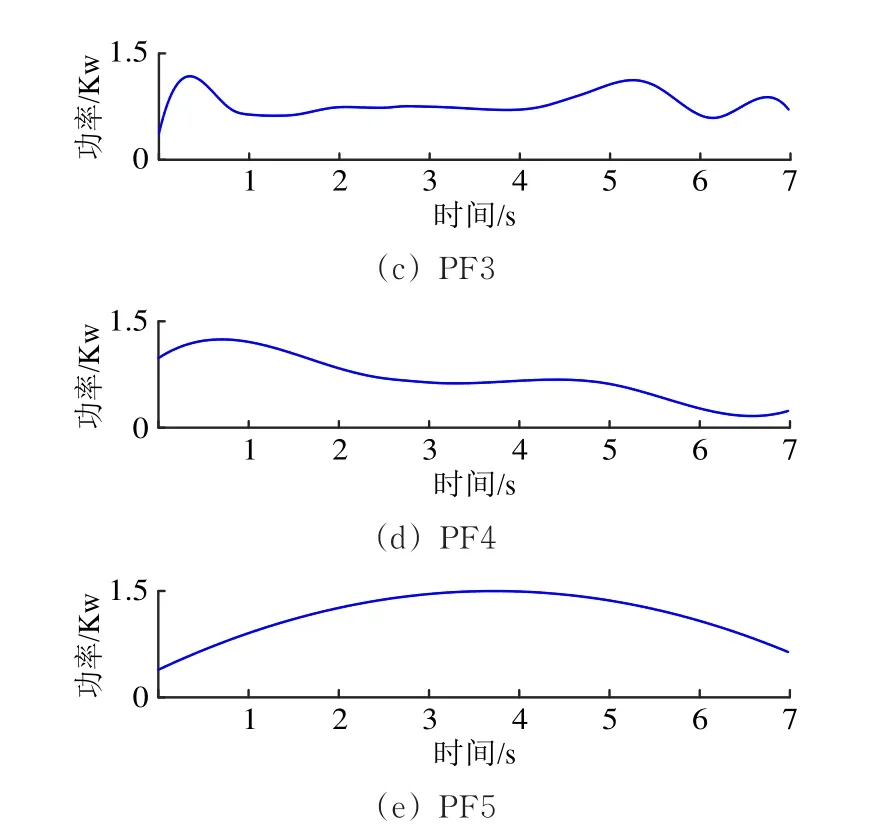
图4 S700K转辙机“亚健康1”运行状态下功率曲线的LMD分解
由图4可知:当分解到PF5分解时,信号序列中没有足够的极值点,可以判定前4层为主要有效信息。以中心频率法实验不同惩罚因子α的取值,当选择α=1 000时,此时中心频率的差异大,信号识别度高。因此取K=4,α=1 000对不同运行状态下S700K转辙机功率曲线进行VMD分解。
对图3所示的6条功率曲线,按照图1中流程图进行VMD处理,分解后得到4个有限带宽的固有模态函数(BIMF)。不同运行状态的同一BIMF频率分布中心相似,且频谱幅值的差异性较小,这里仅给出“亚健康1”和“亚健康2”运行状态下动作功率曲线的模态函数分量BIMF1—BIMF4,如图5和图6所示,对应频率分布如图7和图8所示。
图5 “亚健康1”状态下动作功率曲线的模态函数分量
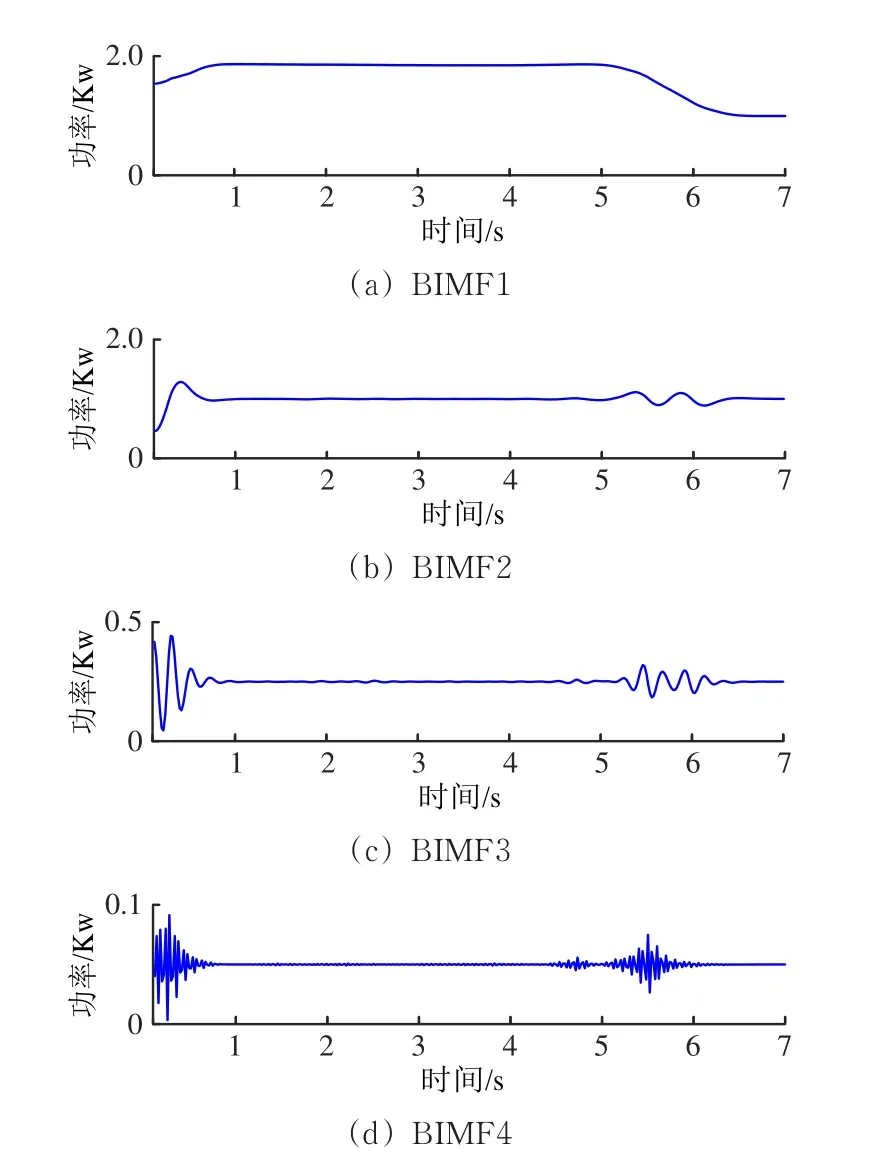
图6 “亚健康2”状态下动作功率曲线的模态函数分量
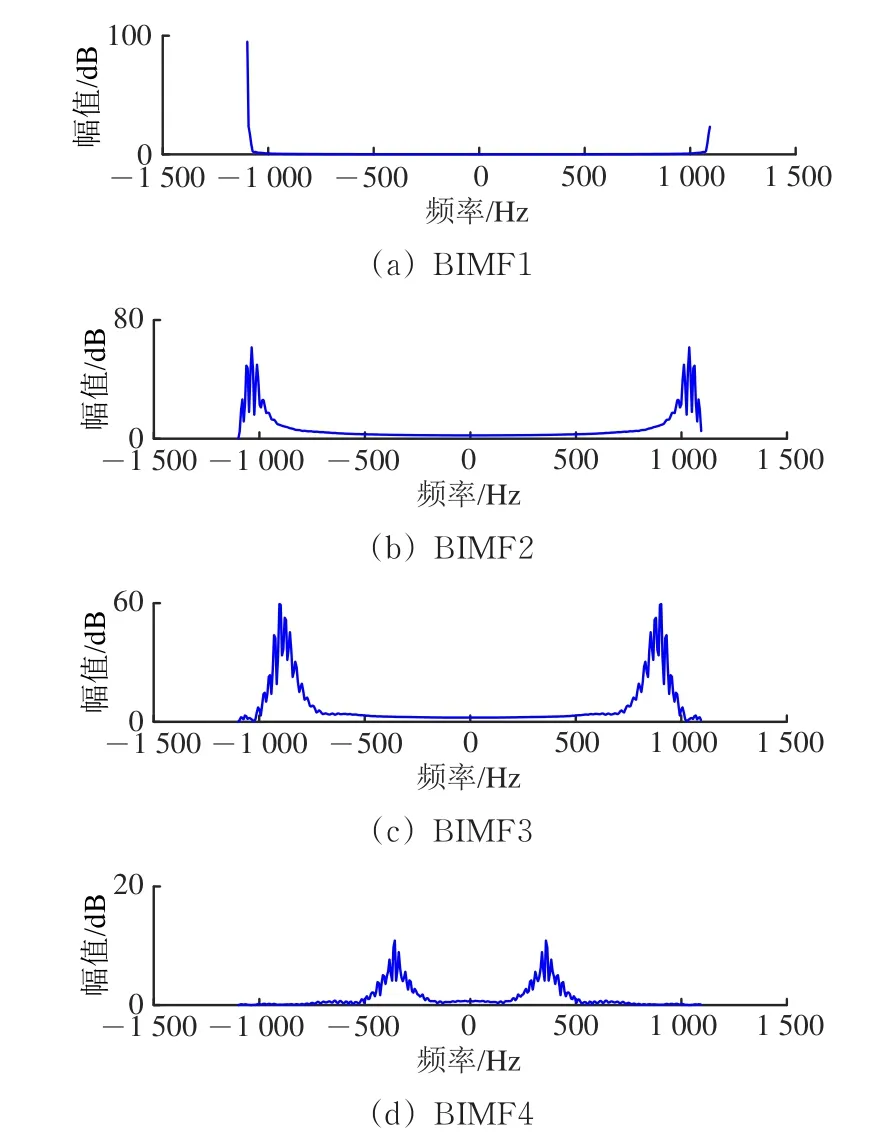
图7 “亚健康1”状态下模态函数分量的频率分布
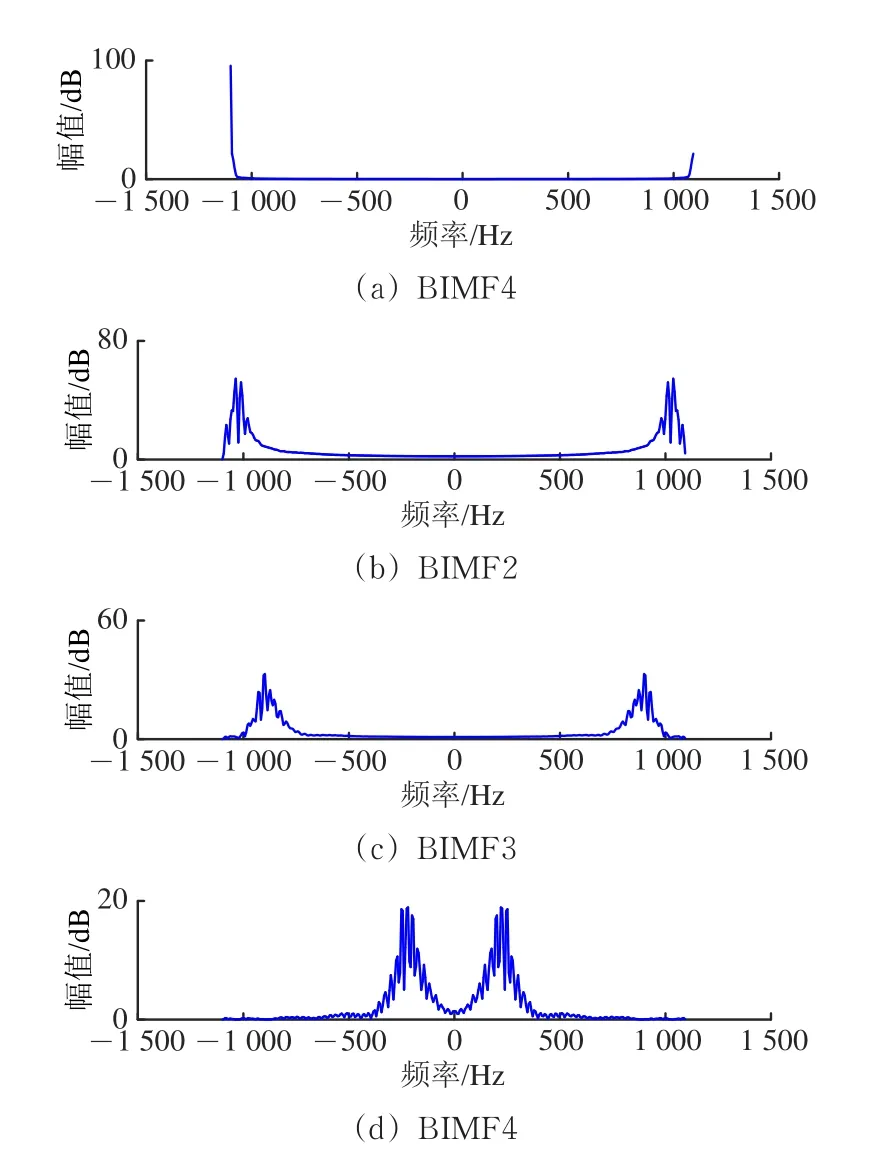
图8 “亚健康2”状态下模态函数分量的频率分布
由图7和图8可知:同一运行状态的不同BIMF函数频谱分布中心不同,如图7中BIMF1包络谱的中心频率高于1 000,BIMF2—BIMF4的中心频率依次降低。为充分表征不同运行状态下VMD分量的有效特征,引用排列熵(PE)计算模态分量,用于描述各分量的信号复杂度。图3所示的6条样本功率曲线的排列熵见表3。
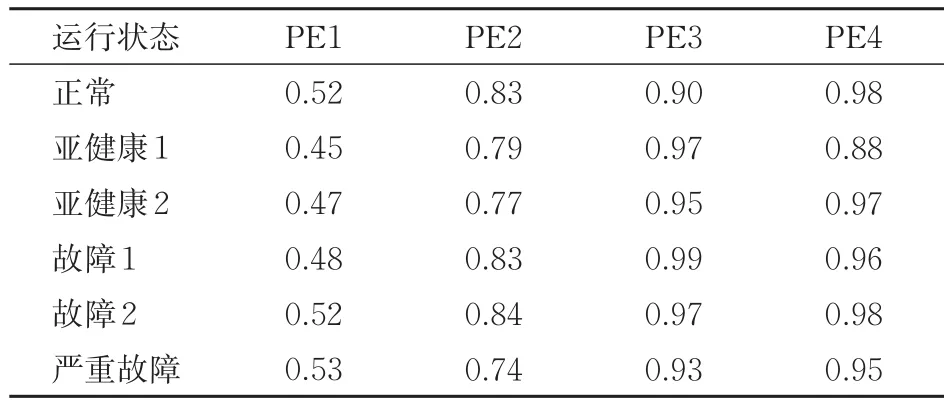
表3 典型运行状态下功率曲线频域特征值
将同一固态模态函数分量下的不同状态类型的熵值作为参数,形成柱状图如图9所示。由图9可以看出:亚健康状态中回路电流过大和转换阶段振动的BIMF4分量排列熵值存在一定差异,故障状态中二极管短路和整流堆开路的BIMF1分量排列熵值存在一定差异。由此可知,根据不同运行状态下功率曲线时、频域特征值的差异性,利用时域特征结合VMD排列熵的频域特征作为状态特征时,能够有效提取S700K转辙机的运行状态特征参数。
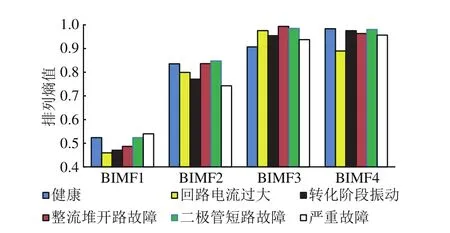
图9 S700K转辙机运行状态VMD分量排列熵柱状图
3.4 S700K转辙机模糊聚类分析
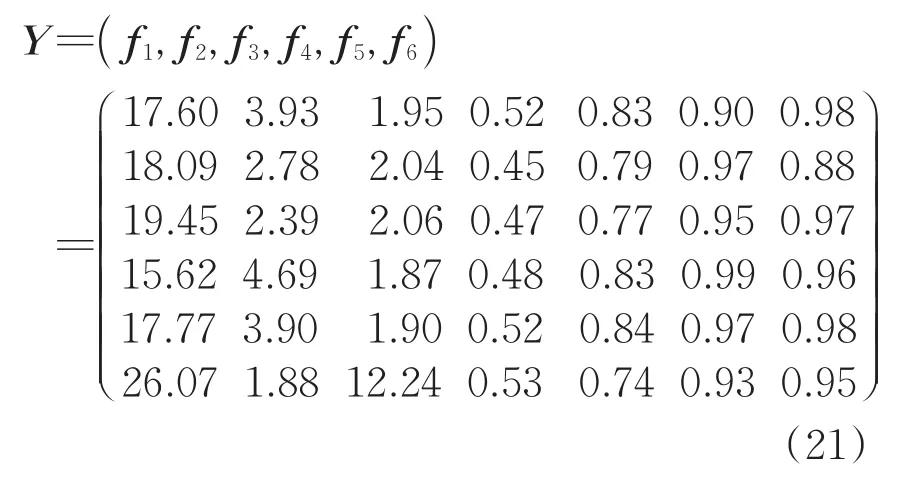
对于图3所示的6条功率曲线,分别以f1—f6表示由其7个特征值构成的特征向量,并进行模糊聚类分析,具体步骤如下。
步骤1:建立初始模糊特征矩阵Y
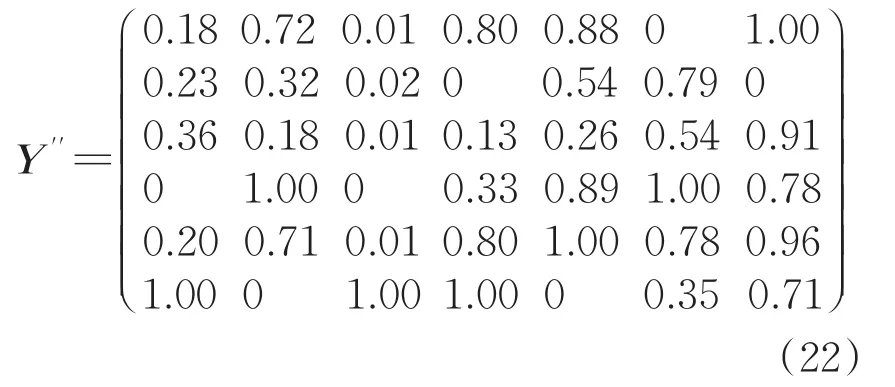
步骤2:采用式(12)和式(13)对式(21)进行标准化处理,得到的模糊标准矩阵Y″为
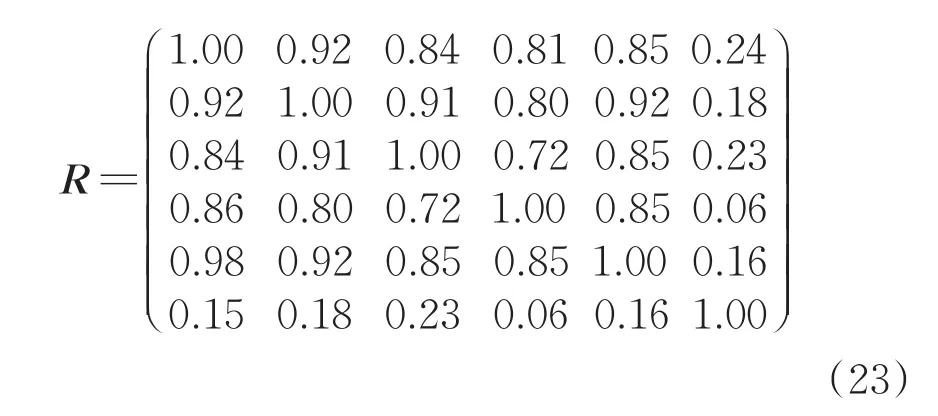
步骤3:采用式(14)对模糊标准矩阵Y″进行相似度计算,建立模糊相似矩阵R为
步骤4:形成动态聚类图,用传递包法建立模糊等价矩阵R*,即t(R)=R*;利用式(16)建立相应等价布尔矩阵Rϖ,当置信因子ϖ从大到小变化时进行聚类,并形成动态聚类图,完成S700K转辙机运行状态诊断。
3.5 实例应用
为验证S700K转辙机运行状态诊断方法的有效性,随机选取兰州铁路局集团有限公司信号集中监测中心关于S700K转辙机在“亚健康2”状态和“严重故障”状态下共2条动作功率曲线作为待检曲线,命名为待检曲线1和待检曲线2,其动作功率曲线如图10所示,经时、频域分析后的特征值见表4。
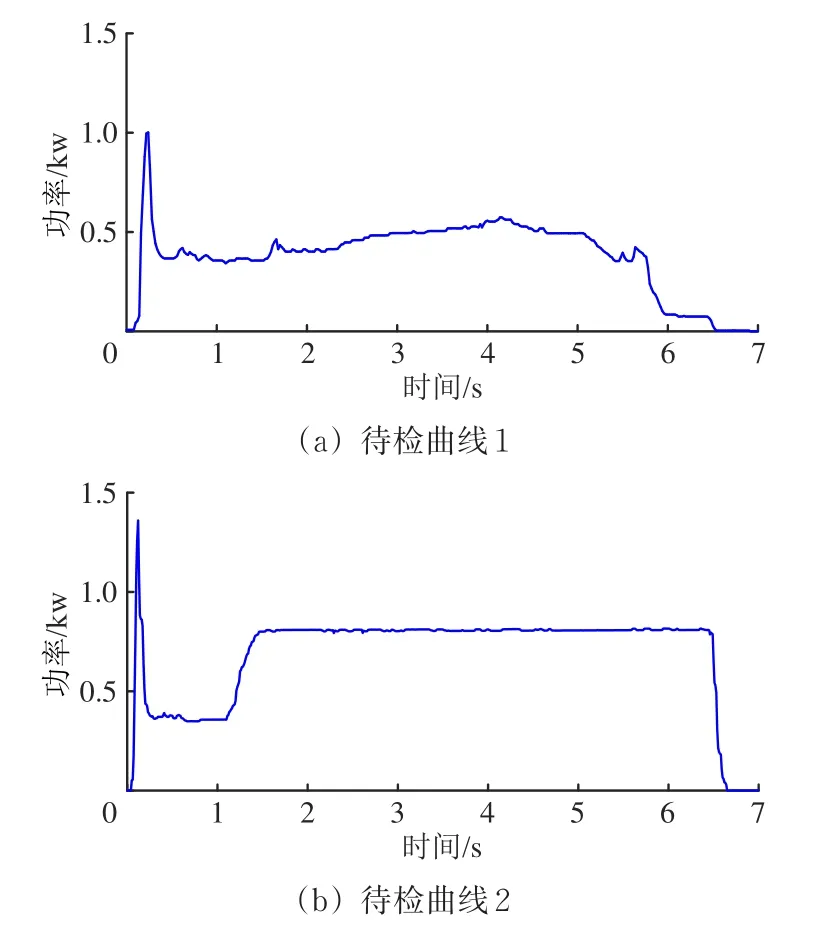
图10 待检动作功率曲线
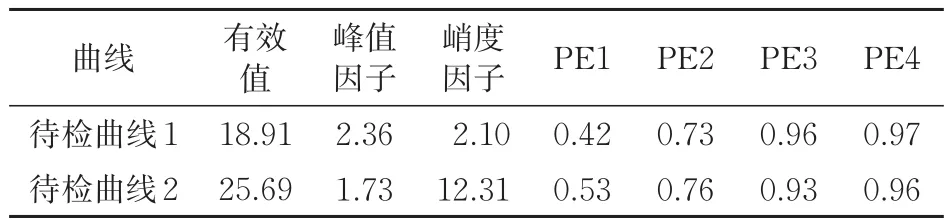
表4 待检动作功率曲线时频域特征值
以fd1和fd2分别表征由表4中S700K转辙机待检功率曲线的时、频域特征值构成的特征向量,并且输入S700K转辙机运行状态诊断模型进行模糊聚类分析,形成动态聚类图如图11所示。
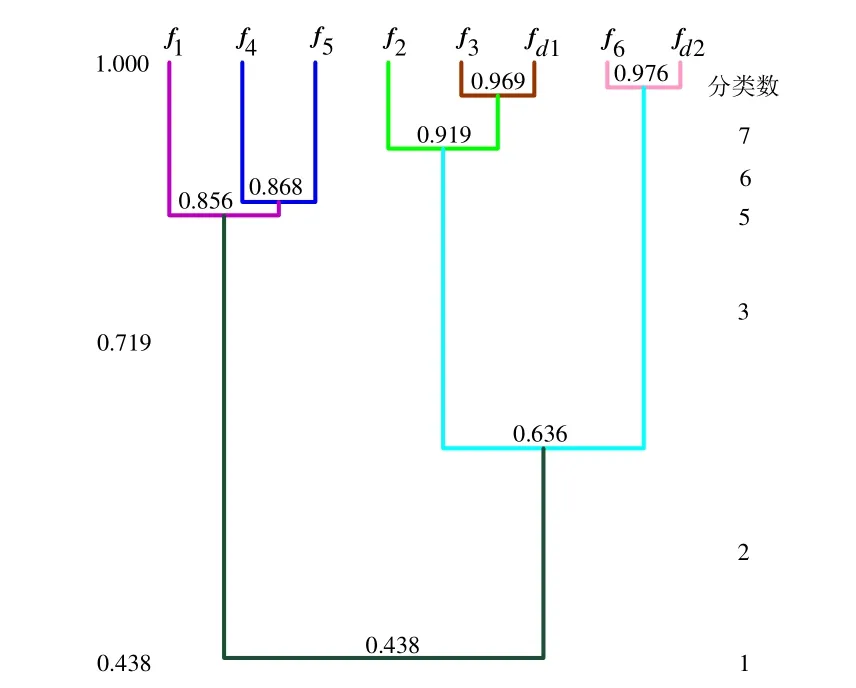
图11 测试集运行状态诊断动态聚类图
由图11可知:左侧为置信因子ϖ的取值,当ϖ从1变化到0时,等价布尔矩阵Rϖ相同的列被归为一类,最终右侧分类数归为一类;当置信因子ϖ变化到0.969时,f2和d0分为一类,则测试样本d0和故障库中典型样本功率曲线f2属于同一运动状态,因此d0被诊断为“亚健康2”运动状态;同理,当置信因子变化到0.976时,测试样本d1和故障库中典型样本功率曲线f5属于同一运动状态,因此d1被诊断为严重故障运动状态,符合现场检测结果。
选取60组曲线,采用本文方法,以MATLAB软件对功率曲线进行诊断,并将诊断结果与现场工作日志进行对比,本文算法诊断率为98.33%,说明提出的方法具有一定的实用意义。由于程序运行时间和故障库的大小有关,经测试故障库为30条曲线时,运行时间不超过1.5 s,从而证明了该算法的时效性。
4 结 论
(1)针对S700K转辙机运行状态与其动作功率曲线之间的关系,提出时域特征结合VMD排列熵频域特征的S700K转辙机运行状态模糊聚类分析算法。
(2)为提取功率曲线细节分量,利用有效值、峰值因子和峭度因子指标来计算曲线时域特征,并结合VMD分解后的排列熵作为其特征,实现了功率曲线微小特征信息的表征。
(3)S700K转辙机全周期运行状态诊断中,模糊聚类分析算法不需要训练,即可实现对状态类型的诊断识别,适合S700K转辙机样本少的特点。
(4)实例结果表明该算法的诊断率为98.33%,实现了S700K转辙机全周期运行状态(正常、亚健康、故障和严重故障)诊断,为其维修、维护提供了理论支持。
