大口径流体自动化校准测试系统研究
2022-06-08丁逸伦赵庆嵘
丁逸伦,丁 斌,赵庆嵘,陆 春,张 凯
(1.南通市计量检定测试所,江苏 南通 226000;2.杭州诚億科技有限公司,浙江 杭州 310000)
1 系统结构
超声无损流量检测利用超声波在顺流和逆流中不同的传播速度来测量相对应的流量,其常见的是以时差法、频差法和速差法为原理。在实际检测中,除了本身测量的原理,设备的精度和安装又很大程度决定了测量结果的准确性,主要是本身就存在很多干扰性的因素,其中最关键的一点为换能器的合理安装位置,而安装位置又由很多因素所决定,包括测试方案的选择(V型、Z型)、管道口径的大小、管道轴线的确定等,这些参数的确定是超声流体测量特别是大口径管道流体测量的必要条件。在目前测量的手段中,虽然有一些辅助的设备和简易工具,在检测过程中还是很大程度依赖检测人员的经验以及检测设备的性能要求,但是即使操作人员经验丰富,检测设备性能优异,也无法解决因为实际操作所存在的原理性问题导致的测量误差以及测量技术性问题[1-5]。因此,为解决目前超声大口径管道流体检测的关键问题,保证超声检测的科学性,本项目设计了一套智能型大口径流体自动检测系统。
本项目结合基础超声检测原理以及多种技术,包括机械自动化、系统计算算法结构、传感器技术等,通过以上技术分别自研管道口径自动测量系统、圆周运动自动化运动单元、X轴运动定位单元、系统可视化软件系统等,所有系统部分都自建通信架构实现系统联动通信,进行数字化数据通信传送(见图1)。通过通信总线实现所有部件独立而且系统化运作,可以进行运动方案的编制,进行自动计算并定位制定管道位置,通过显示软件可以展示立体运动模型,通过软件可以模拟运动路线,设计最优化测试方案,经软件控制自动执行目标,数据经过软件处理,最终全程自动计算测试结果。
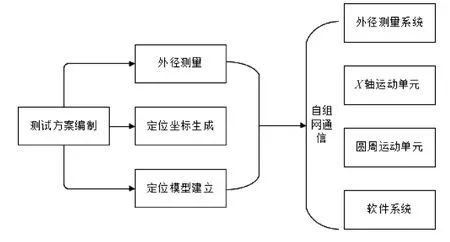
图1 系统架构
整体系统具备完善的机械结构,可以实现超声换能器的准确定位运动。系统包括多个自动控制运动单元以及测量单元,所有单元可实现局域组网,通过终端系统实现局域超控。在设备的运动可测量过程中实现系统一体化,所有部分通过校准实现同步,在系统以及控制单元系统的结合下,按照终端的方案设计要求实现对运动单元即换能器的定位,从而实现准确定位放置,超声换能器可通过运动单元实现换能器的定位运输,如图2所示。外径测量系统由两套传感器系统组成,在测量管道外径的同时,实现管道平行轴线的定位,以此可以实现准确而且科学的测量基础。

图2 系统设计模型
2 外径测量系统

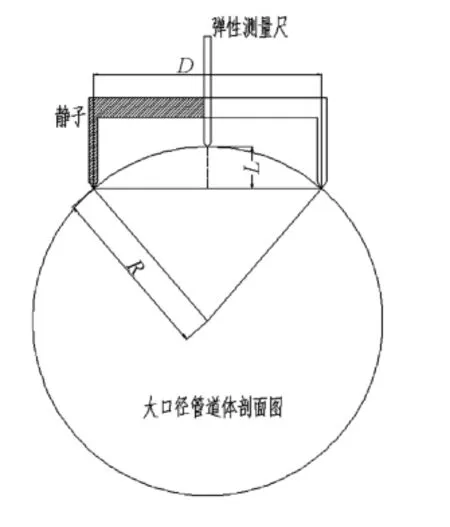
图3 外径测量原理
在外径测量中以微机核心处理器作为数字化处理核心器件,同时采用自研电磁感应传感器测量位移,直接反映了圆周外径所对应的L,通过三角函数计算,可以直观得出对应的R。经过测试,此设计方案最高误差可以达到0.1 mm,完全满足方案的设计目标要求。外径测量系统除了传感器的接入,还包括无线通信模块、显示模块、测量校准复位模块。以单片机LPC824为核心处理器,通过对相关集成电路进行通信控制,实现整个系统的运行,其中整套硬件电路还包括存储器和电源处理部分,以及USB有线通信部分,还可对单个单元部分进行本地化设置,包括地址编码以及溯源测试。通过USB有线本地设置可以实现超级管理员本地设置权限,实现对测量单元的最高设置要求。设置下发的地址编码通过EEROM的存储介质存储于指定扇区,每次系统上线将通过编制地址进行数据处理,本身具备无线通信的单元,可以通过无线抄送进行本地组网。此功能的设计主要实现本地系统单元进行系统化超控,超级终端进行组网抄送时将下发广播式命令,本地单元通过特定地址进行数据上传,终端系统通过地址识别相应的外径测量单元而实现系统配置,通过握手信息之后,单元测量模块将通过上传数据实现终端数据的立体化展现,实现系统的可视化要求。系统可以通过手动或者自动(系统通信设置)完成对测量系统的校准和复位,以便于日常测量的校准以及系统的溯源,同时此系统配备双外径测量,保证了管道定位的准确平行轴线,确保了超声运动模块在定位中的科学性和准确性。
3 运动单元
系统具备全自动运动单元,可通过生成坐标实现对换能器的自动定位运动输送。通过系统设置计算系统定位坐标,将现场测量数据包括外径测量结果以及原点定位零点,通过主机系统实现准确定位计算。运动单元通过设计运动实现自动归零运动,单元通过强磁性运动驱动器进行钢体表面吸附,通过驱动器进行运动驱动。管道的吸附运动可实现大于270°的运动圆周角度,同时X轴的定位通过轴向的相对位移传感器进行,通过双轴向驱动,最终形成了立体型圆周管道运动。圆周脉冲式光栅传感器以及X轴定位传感器可实现最小0.1 mm的定位精度,理论上实现0.1°圆周运动定位角度,可以很大程度上避免人为测量定位不准确所导致的人为误差,解决了因人为操作所导致的超声测量偏差。
此运动部分包括两套系统,分别为两个超声单元的载体部分,以实现外夹式超声测量的形式要求。而运动则包括X轴和圆周运动,以实现超声探头对于相对圆心角度位置以及相对直线距离的定位计算。对于圆周运动,通过脉冲式光栅传感器进行步距角实现,其换算的基础主要基于第二部分外径测量单元的测量结果,通过外径测量部分对于外径的实际测算进而结合光栅圆周步距角的换算,最终得出最小光栅步距所代表的最小圆周角度。通过光栅圆周脉冲计数实现对单圆周运动所对应的相应角度关系,通过立体换算、多平面的结合,最终实现相对圆心角度多对应的相对角度。由于被测管道的管径不一,所以圆周运动中必须克服随机管道直径所能适应的机械结构。因此,在设计的机械结构中,需存在弹性的伸缩装置。通过弹性的伸缩装置实现不同外径的外夹式调整,但是由于1套系统中设计有4套运动机构,因此在弹性装置中分别加入准确的角度外夹装置,以同步化4套机构的运动步距,最终实现4套系统的同步性,以此保证在圆周相对运动中的相对角度误差。
除圆周相对运动外,同时存在轴向X轴运动。X轴的运动主要实现对于相对位置的X轴距离定位,即对于探头相对直线位置的定位计算,此部分主要通过精密丝杆的运动实现单元的运动。精密丝杆的圆周转动即为相对换算运动单元的运动单元距离,此方向在运动之前需设定原点位置,同时必须保证两个单元的原点为绝对一致。因此,在设计加工丝杆的相对位移尺中必须设计加入一套相对电子尺,此部分采用容栅尺作为测量载体。在操作使用前,通过对于容栅尺动子的相对位移定位,实现对于原点的确定,通过单位容栅位移定位装置实现相对位移的运动定位。在运动过程中通过原点定位结合电机步距角的相对测算,实现X轴相对定位,此单元也如其他所有测量单元一样,具备无线组网硬件条件,通过本身地址的编制以及运动方案的下发设置,终端可以通过系统的协议命令,实现对其相对位移的超控,在终端可视化系统中实现相对位移的可视化效果,同时可以通过终端编辑系统手动或者自动的设计,实现此单元的自动化定位行走。
运动单元控制电路,如图4所示。除了基本的机械运动结构,主要由驱动部分、定位传感器、通信结构、数字控制部分等组成,可实现实时通信,系统控制中同时结合PID控制算法,在运动稳定性以及精度上得以最大限度地保证,硬件控制电路主要以STM32F030为核心MCU,通过PWM控制驱动器,实现步进电机的运动,相对的运动距离通过相应的位移传感器进行定位,实现闭环式控制定位。

图4 运动单元控制电路
4 结语
此系统通过一系列的软硬件设计以及机械化运动结构,结合系统软件的配套和数字化检测设备,实现对超声波流量计换能器的定位传送,改变了以往人为手工测算和安装的现状,从理论上实现了以往依靠经验操控检测设备过渡到数字化检测的进步,很大程度上提升了以往依靠人为经验以及设备的优越性才能完成的测量精度。通过系统终端对传感器以及运动控制系统的组网、可视化系统以及数字化的展示,实现了大口径流体测量的科学性、合理性,对测试数据实现闭环。标准化的设备以及自动化测试流程对于测量数据来说更加科学,同时采用此设备可以对相同条件下的检测设备进行对比,可以很大程度上降低设备采购成本,更加科学地实现了对使用者成本的控制,对于测量设备而言,减少了人为计算误差和操作误差。
