间接矩阵变换器-电机调速系统基于输入电压观测的ZCC-MPC方法
2022-06-08王闪闪牛可李辉
王闪闪,牛可,李辉
(1.郑州铁路职业技术学院机车车辆学院,河南 郑州 451460;2.郑州机电工程研究所,河南 郑州 450000)
间接矩阵变换器(indirect matrix converter,IMC)具有无需大型储能装置、双向功率流动、功率因数可调、功率密度高等优点,非常适合于驱动航空航天、军事等体积受限领域的交流感应电机(induction motor,IM)调速系统中[1-4]。
在以往的研究中,采用IM矢量控制(vector control,VC)和IMC空间矢量脉宽调制(space vector pulse width modulation,SVPWM)相结合的传统控制策略,保证了IMC-IM调速系统具有良好的性能[5]。然而,这种控制结构复杂,调节参数众多,难实现理想的动态性能。
近十年来,模型预测控制(model predictive control,MPC)思想被引入到该调速系统中实现高性能调速,思想直观,PI参数较少,可实现多目标优化[6-7]。然而,采用传统MPC方法,需要大量的采样信号,包括输入/输出电压/电流,这就需要大量的采样和调理电路,增加了硬件实现的成本和难度[7],采样信号的延迟和误差也直接影响其控制性能。此外,由于传统MPC方法在一个采样周期内只选择一个开关状态,为了保证整流级双向开关之间的换流过程的安全性,需要采用四步换流方法,换流过程繁杂,并且需依赖精确的电流方向检测[8]。多路采样和多步换流阻碍了具有优越性能的模型预测控制在硬件平台上的实现。
本文中,针对IMC-IM调速系统,提出了一种新型基于输入电压观测的零电流换流-模型预测控制(ZCC-MPC)方法。设计并增加了一个输入电压观测器以代替采样电路来观测三相输入电压,简化了硬件电路,提高了控制精度。此外,在每个采样周期的开始处插入与逆变器级的零电压矢量相对应的开关状态,实现了简单的两步零电流换流策略。仿真和实验结果验证了方法的可行性和有效性。
1 IMC-IM系统拓扑
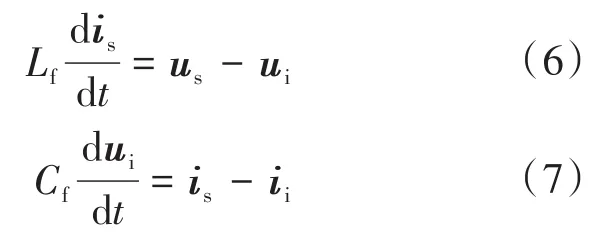
IMC-IM系统拓扑结构如图1所示,IMC主要由输入LC滤波器、虚拟整流级、钳位电路、虚拟逆变级组成。其中LC滤波器(Rf,Lf,Cf分别为滤波器电阻、电感和电容)可滤除网侧电流中因高频开关动作而产生的高频谐波;虚拟整流级包含6个双向开关,每个双向开关由两个IGBT及反并联二极管组成;由二极管和小容量电容组成的钳位电路可实现中间直流环节的过电压保护;虚拟逆变级是一个普通电压源型逆变器(voltage source inverter,VSI)。

图1 IMC-IM系统结构框图Fig.1 The configuration of IMC-IM
2 控制方法
为在保证系统高性能的同时简化控制,提出新型基于输入电压观测的ZCC-MPC方法。如图2所示,其控制结构主要包括三部分:A.传统MPC模块;B.输入电压观测器模块;C.开关状态组合。

图2 基于输入电压观测的ZCC-MPC方法控制框图Fig.2 The control scheme for the ZCC-MPC strategy with the input voltage observation
使用传统MPC方法,至少需要12路采样信号,包括电网电流/电压、输入电压和输出电流,这增加了采样电路的复杂性、成本和延迟性。另外,由于在一个采样周期内只采用一种开关状态作为控制信号,为保证整流级双向开关的安全换流,需采用复杂的四步换流策略,其要求对直流母线电流进行准确的方向检测,并且换流过程较长。以上问题增加了IMC-IM系统硬件实现的难度,限制了IMC的输入输出性能。针对这些问题,本文提出并设计了输入电压观测器和开关状态组合。
2.1 传统MPC方法
第一部分介绍传统MPC方法的控制结构,包括磁链观测、转矩磁链预测、输入无功功率预测和品质函数最优化四模块[8]。采用外PI闭环控制器计算参考转矩。在内部控制中,采用磁链观测器来估计异步电机在当前一采样周期Ts内的定转子磁链;转矩和磁链预测模型需要磁链观测器来获得下一采样周期的定转子磁链、电磁转矩值;在输入无功功率预测模型中,利用网侧电压/电流和输入电压预测下一采样周期的瞬时输入无功功率;品质函数最优化评估调速系统的性能,并确定IMC的最佳开关状态作为下一个采样周期的控制信号。
1)定转子磁链观测。为获得k时刻准确的定转子磁链观测值根据异步电机的数学模型[8]设计了磁链观测器如下:

式中:Rs,Lr,Lm,Ls分别为定子电阻、转子电感、定转子互感以及定子电感为k-1时刻定子磁链观测值为输出电压k时刻观测值;io(k)为输出电流k时刻检测值。
2)转矩和磁链预测。实现定转子磁链观测后,可进行下一采样周期异步电机定子磁链和电磁转矩的预测[8],预测模型如下:

显然,式(3)中需要提前确定电机定子电流预测模型,根据电机动态方程[8]确定定子电流预测模型如下:

其中

3)网侧无功功率预测。根据瞬时无功功率理论,输入无功功率预测模型QP(k+1)定义如下:

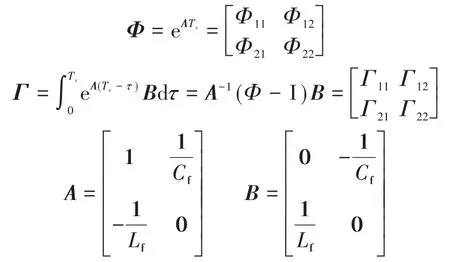
把式(6)、式(7)基于正欧拉公式的离散化,网侧电流预测模型表示为

其中
式中:ui(k),ii(k)分别为k时刻滤波器后输入电压、电流检测值。
4)品质函数最优化。考虑到异步电机和公用电网的性能要求,品质函数g建立如下:

式中:λ1,λ2和λ3分别为转矩、磁链和输入无功功率的权重系数,表示各因素的优先级;上标“P”为预测值。
其中,期望输入无功功率参考值Q*设为0,磁链参考值设为等于标称磁链Ψn,转矩参考值由外部PI控制器获得。
最后,依次计算出IMC所有有效开关状态下品质函数值,并选择使品质函数最小的开关状态作为下一采样周期的最优开关状态。
2.2 输入电压观测器
传统的MPC方法需检测多达12路模拟信号,包括电网电压、电网电流、输入电压和输出电流,其中3相输入电压信号如图2虚线箭头所示。IMC输入电压非理想正弦,在一个采样周期的不同时刻,输入电压会突然变化,最终采样调理电路不可避免的延时导致很难检测出准确的数值,从而降低磁链和转矩预测的有效性、影响调速系统的性能。
为了降低采样电路的复杂度和成本,消除输入电压大的采样误差,本文设计并建立了输入电压观测器,取代3路采样,以提高系统控制精度。
观测器设计以输入LC滤波器数学模型式(6)为基础,根据欧拉公式进行离散:

式中:us(k-1),ui(k-1)分别为k-1时刻滤波器前后网侧电压、输入电压检测值;is(k-1)为k-1时刻网侧电流检测值。
因输入电压连续、基本正弦,采样频率较高则可以假设:


利用式(12),即可用于计算磁通观测器所需的当前采样周期内的输出电压;进一步结合IMC的开关状态,可预测出下一采样周期的输出电压如下:

式中:S(k),S(k+1)分别为第k,k+1采样周期IMC的开关状态。
然而,观测值与实际值之间的误差是不可避免的。为减少对观测器的依赖,利用输入滤波器模型,对输入无功功率预测模型中电网电流预测模型进行了重新设计,推导如下:
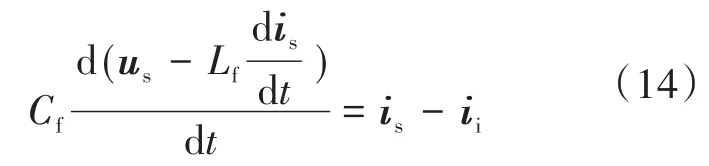
其中,一阶微分用正向欧拉公式离散,二阶微分用二阶中心差商法离散。

最终,式(15)实现了网侧电流预测模型与输入电压观测值的解耦,提高了预测模型的精度。
2.3 开关状态组合
传统MPC方法的预测结果为选择使品质函数最小的开关状态应用于下一采样周期控制IMC,因此虚拟直流母线电流在大多数情况下不为零,容易导致开关换流失败。为了保证双向开关换流的安全性和可靠性,需要一种基于直流电流方向的复杂四步换流方法[8]。
例如图3,假设第(k-1)次和第k次时刻的最佳开关状态分别为(100100110)和(000110100)。在第k时刻,整流级的开关状态要求从(100100)变为(000110),即电流从a相换向c相。然而,同时逆变级的开关状态从(110)变为(100),即直流母线电流不为零。假设直流母线电流从网侧流向异步电机,则必须采用四步换流,如图3所示 ,即Sapp(off)-Scpn(on)-Sapn(off)-Scpp(on)。 显然,换流过程依赖于直流母线电流方向的准确检测,而直流母线电流方向是高频变量,很难被检测出来;此外,一个长而复杂的换向过程也不可避免。
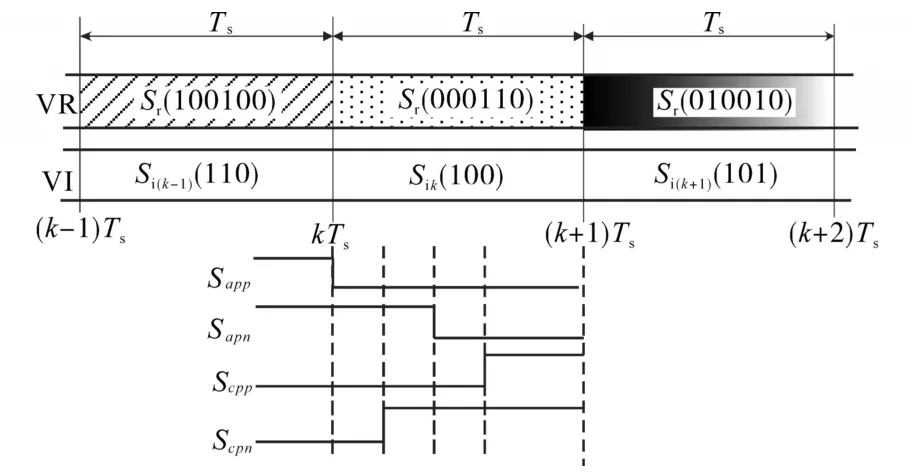
图3 传统MPC方法下IMC四步换流过程及开关状态序列Fig.3 The switching state sequence and four-step commutation of IMC by using conventional MPC strategy
为了克服上述问题,如图4所示,提出了整流器级的零电流换相(ZCC)方法。
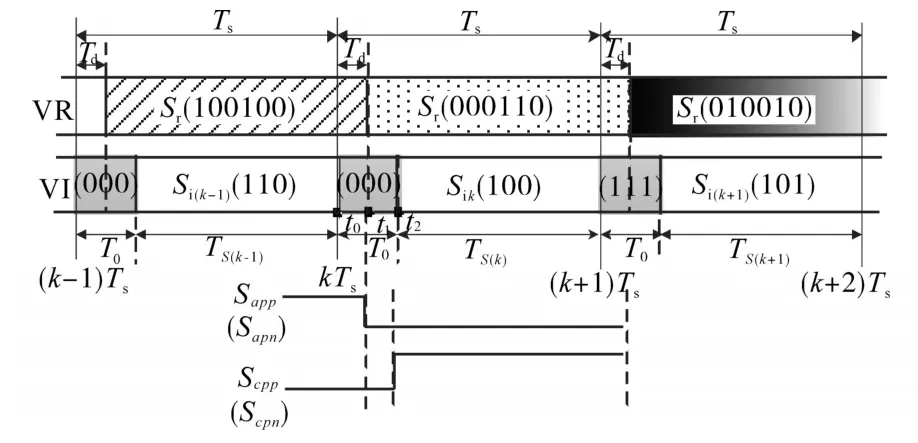
图4 ZCC-MPC方法下IMC零电流换流过程及开关状态序列Fig.4 Switching state sequences and zero current commutation of IMC by using ZCC-MPC strategy
整流器级的零电流换相(ZCC)方法核心思想是在双向开关的换流过程中保持直流母线电流为零,具体步骤如下:
第一步,整流器级的两步开关动作被延迟,延迟时间Td取决于逆变器级的换向时间。
第二步,逆变级采样周期两端插入的零开关状态(000/111),其选择满足最少开关动作次数的原则。如图4所示,在第k个采样周期内,IMC的开关状态的顺序为(100100000)-(000110000)-(000110100)。但序列(000110111)-(010010111)-(010010101)应用于第(k+1)个采样周期。
第三步,每个采样周期内零电压矢量持续时间必须保证逆变器级和整流器级完全无死区换流。零开关状态插入时间T0固定如下:

式中:TSr_off,TSr_on分别为虚拟整流级双向开关关断和开通时间;TSi_off,TSi_on分别为虚拟逆变级开关关断和开通时间。
最终,采用基于输入电压观测的ZCC-MPC方法可大大简化采样电路和复杂的换流过程。
3 仿真结果
为验证所提控制方法的有效性,进行了大量的仿真,其中关键电路和电机参数如下所示:Ts=0.96 Wb,Lm=0.236 6 H,Ls=0.249 8 H,Lr=0.249 8 H,Rs=2.54 Ω,Rr=1.67 Ω,Lf=5 mH,Rf=100 Ω,Cf=20e-6 F。
输入相电压的观测值与实际值的对比如图5所示。观测值和实际值高度一致,均为波动明显的非正弦曲线,采集图5中0.1 s内观测值及实际值之间瞬时误差值,ui-ui(k)基本上都在(0±5)V的范围内波动,最大的绝对误差值|ui-ui(k)|约为8 V。证明新型控制方法中采用输入电压观测器代替3路采样调理电路,其观测值正确有效,观测器设计十分必要。

图5 输入相电压观测器ui(k)及实际测量ui波形寅比Fig.5The comparison between the observed value ui(k)and actual value uiof the input phase voltage
图6为IMC连续几个周期内所有开关的脉冲和直流母线电流波形。由于仿真用开关是实现瞬时换相的理想开关,因此整流级的延迟时间设置为0。可见,整流级的开关状态在每个采样周期的初始时刻都会发生变化。同时,采用逆变器级零电压矢量对应的开关状态,从而获得零直流母线电流。

图6 IMC所有开关脉冲及中间直流电流idc波形Fig.6 Pulses for each switch of IMC and the DC-bus current waveform
图7为网侧的a相电压、a相电流以及网侧无功功率Q的波形。可见,网侧电流与网侧电压同相正弦,输入无功功率几乎为0。图8和图9为稳态和动态下磁通、转矩、转子转速和输出电流的波形。在图8中,IM以800 r/min的参考转子转速空载运行。在图9中,t=2 s时,参考转速IM从800 r/min开始最终跳至1 200 r/min,t=2.3 s时,负载转矩从0 N·m跳到5 N·m。显然,输出电流理想正弦,磁通、转矩和转子转速遵循参考值。此外,在转速或负载转矩阶跃下,转子转速快速跟踪参考转速、无超调。
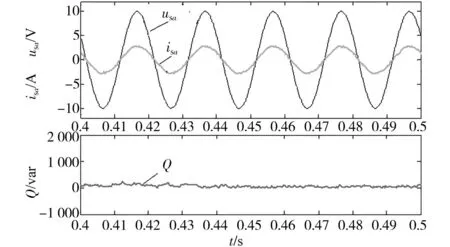
图7 网侧相电压usa与相电流isa波形Fig.7 Waveforms of grid phase voltage usaand current isa
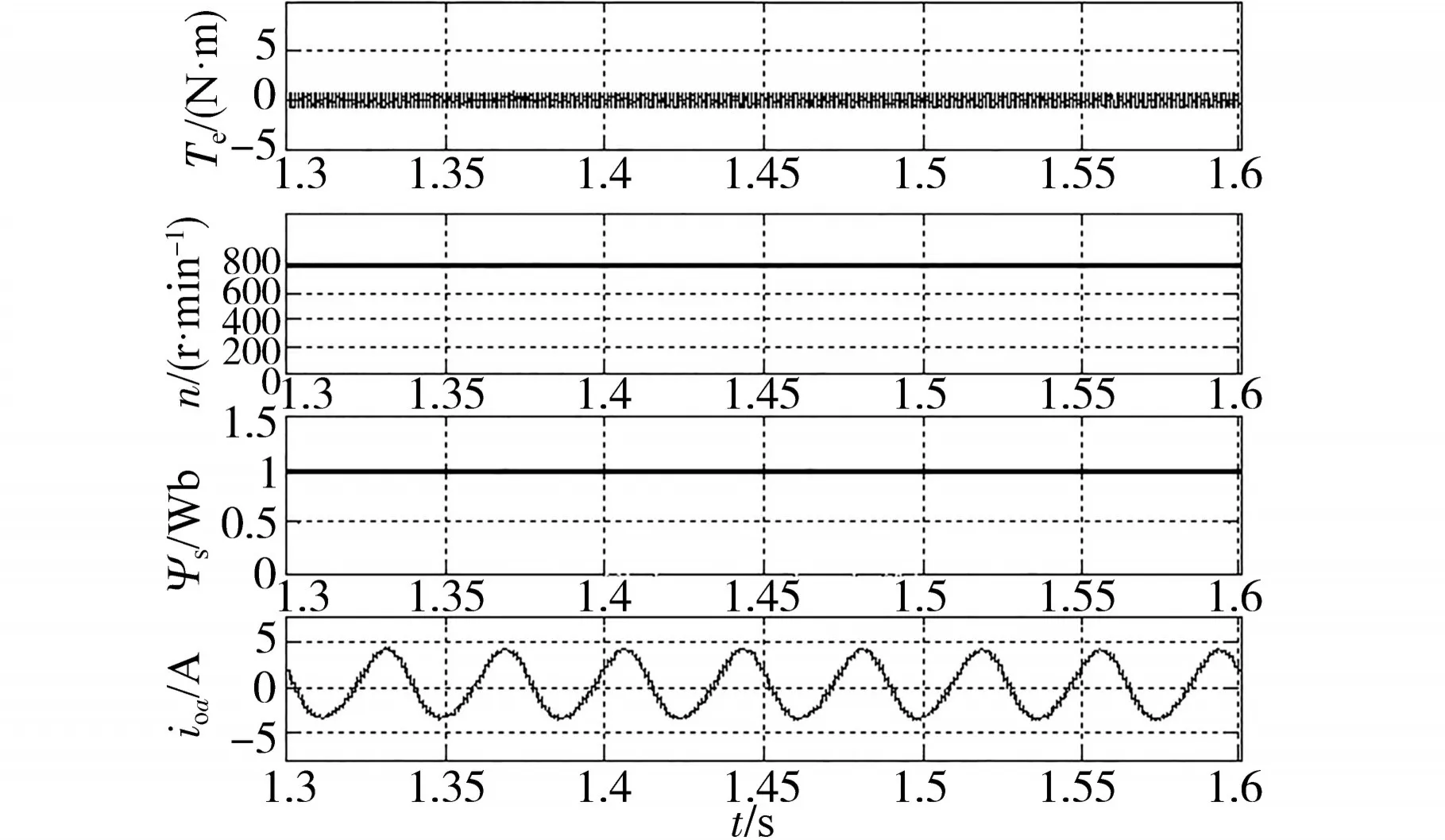
图8 异步电机电磁转矩、转速、定子磁链和定子电流稳态波形Fig.8 Waveforms of the electromagnetic torque,rotor speed,stator flux and stator current(steady state)
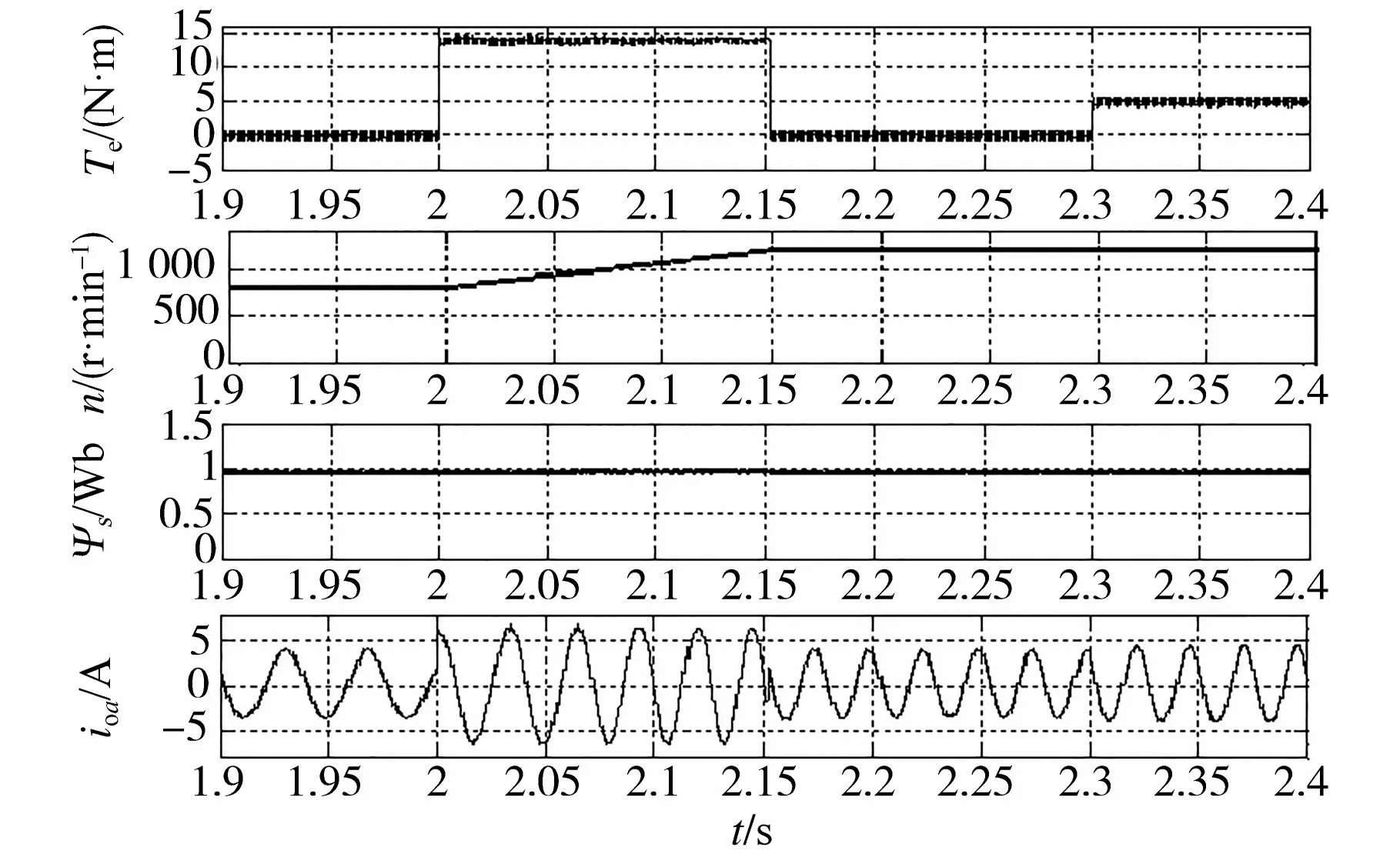
图9 异步电机电磁转矩、转速、定子磁链和定子电流动态波形Fig.9 Waveforms of the electromagnetic torque,rotor speed,stator flux and stator current(dynamic)
4 实验结果
为进一步验证所提出的控制方法的有效性,如图10所示搭建IMC-IM调速系统实验平台,其中主电路和电机参数均与第3节中的仿真参数相同,系统采样频率fs=10 kHz。

图10 IMC-IM系统实验样机Fig.10 Experimental prototype of IMC-IM system
图11为零电流换流期间IMC的每个开关的脉冲。如图11所示,在第k时刻,在T0期间逆变级采用开关状态(111),实现了整流级两步零电流换流。实验中,将整流级Td、死区trec,tinv和T0的延迟时间设为Td=2.5μs,trec=tinv=2 μs,T0=4.5μs,以保证两步零电流换流的安全性。
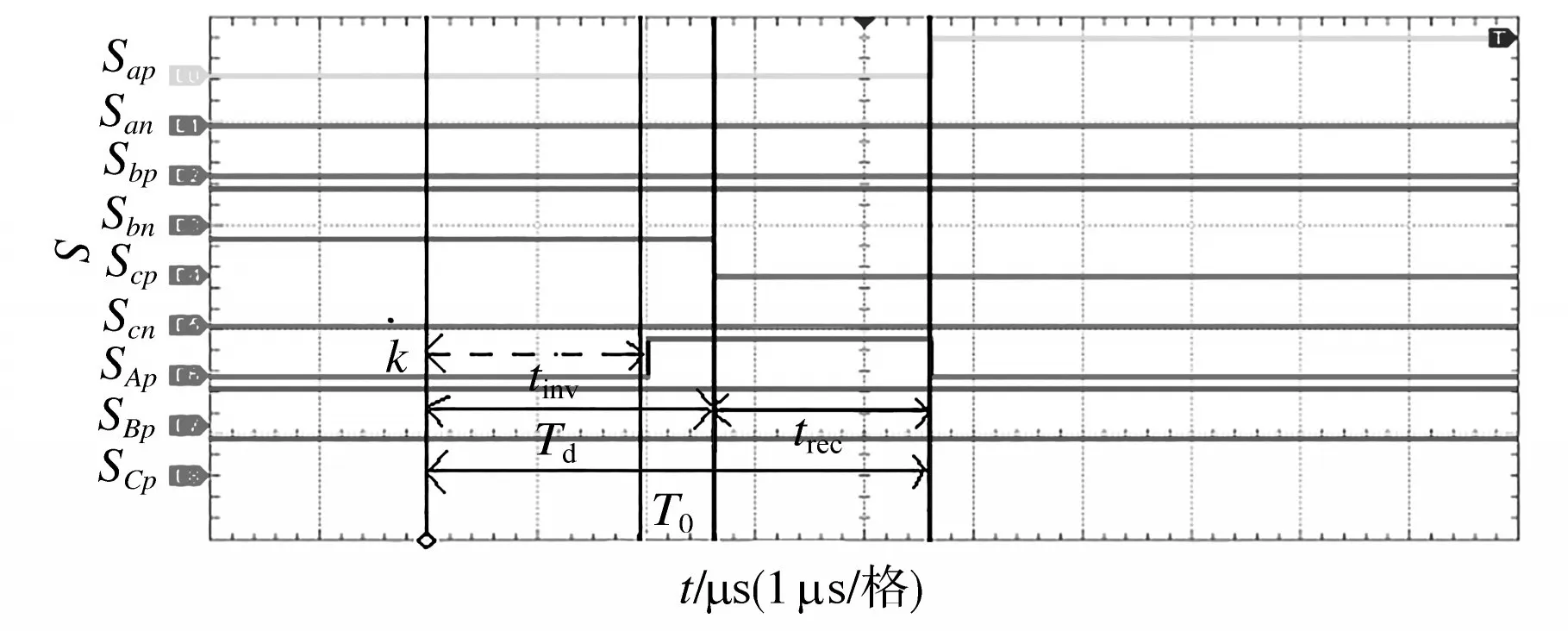
图11 IMC零电流换流方式下所有开关脉冲波形Fig.11 Pulses waveforms for each switch of IMC during zero current commutation
为简化采样电路,节约硬件成本,并考虑到网侧与矩阵输入侧电压相差不大,本实验平台摒弃滤波器后输入电压采样调理电路,可通过观察网侧电压电流波形的正弦性衡量输入电压观测器的可行性(考虑到算法需要,网侧电压电流采样已具备硬件条件)。图12为网侧的相电压和相电流波形,两波形正弦性良好且基本同相,网侧可基本实现单位功率因数。
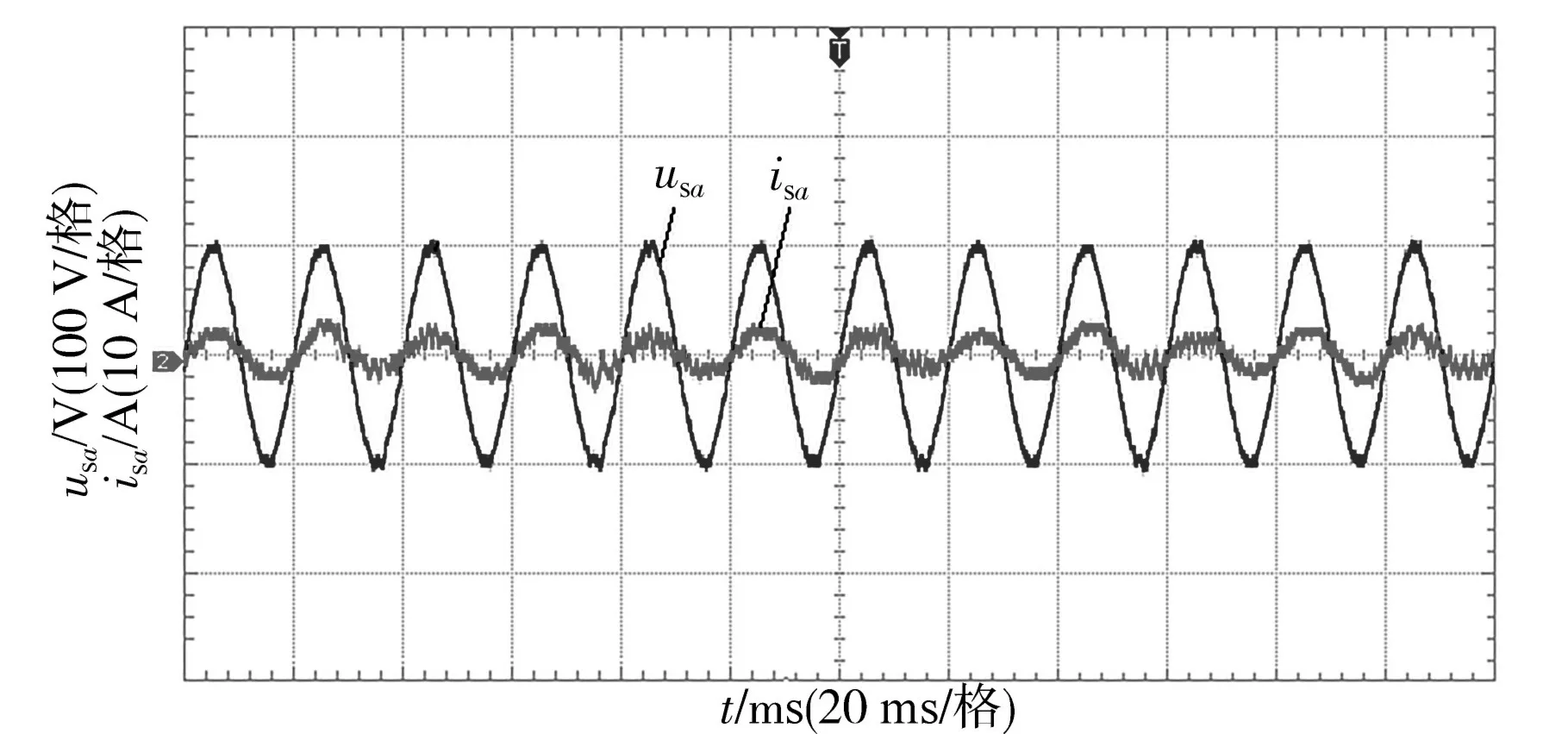
图12 网侧相电压usa和相电流isa波形Fig.12 Grid phase voltage usaand current isawaveforms
无负载异步电机稳态和动态波形如图13~图14所示。图13设置参考转速为300 r/min,图14设置参考转速从300 r/min逐步上升至500 r/min。实验结果表明,电机的输出电流正弦性良好,转子转速在不同条件下均能快速跟踪参考值(阶跃时间约为50 ms),无超调,实现了IMC-IM系统高性能调速。
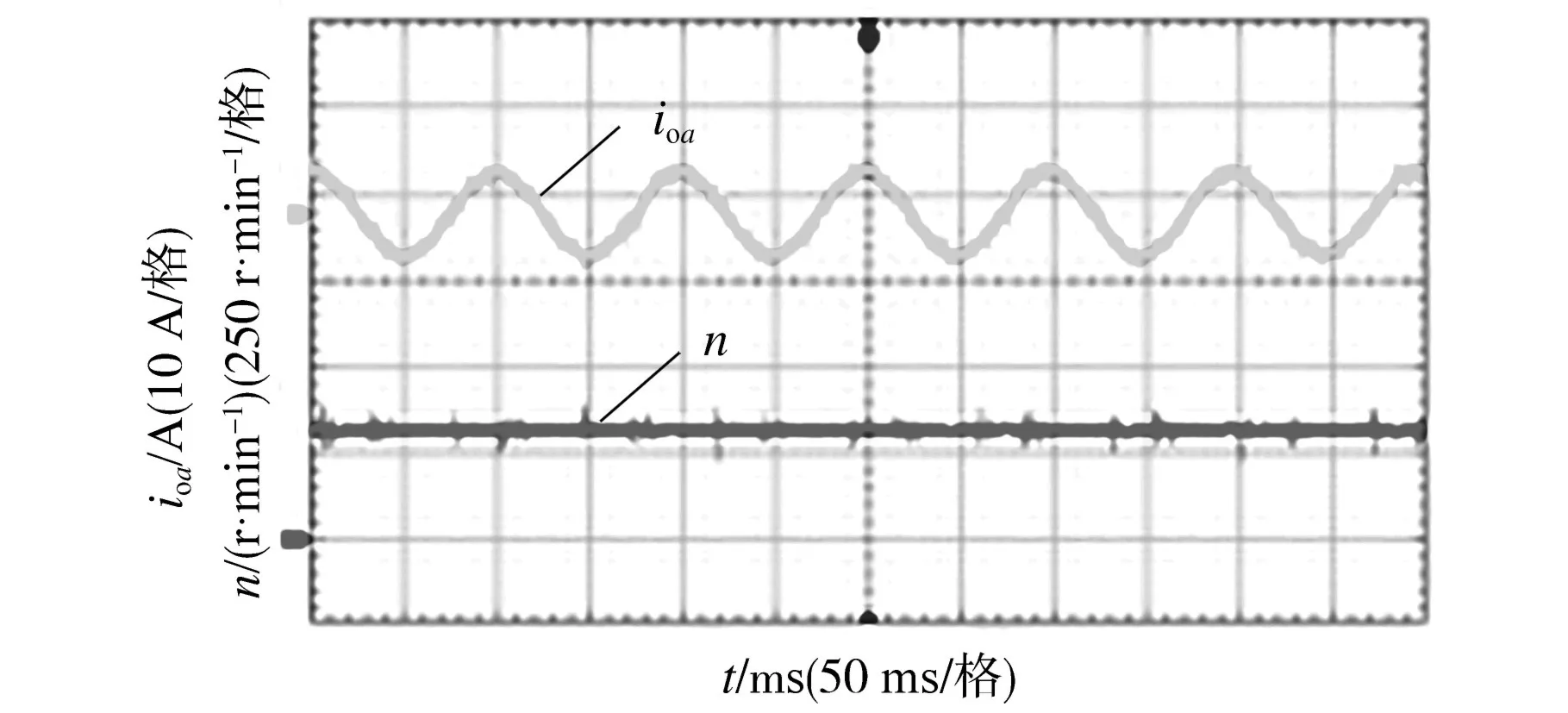
图13 异步电机定子电流ioa和转速n稳态波形Fig.13 Waveformsofstatorcurrentioaandrotorspeedn(steadystate)

图14 异步电机定子电流ioa和转速n动态波形Fig.14 Waveformsofstatorcurrentioaandrotorspeedn(dynamicstate)
图12~图14输入输出良好波形均验证了基于输入电压观测器的ZCC-MPC算法的有效性。
对比仿真和实验波形,在设置相同采样频率fs=10 kHz的条件下,实验电流波形正弦度略差,带有尖峰和毛刺。分析原因:相比较于仿真中的理想电路,1)IMC实验平台的双向IGBT有压降及开关时间延迟;2)采样调理电路精度有限,检测值存在误差;3)实验中电流探头精度略低;4)电磁干扰EMI。
5 结论
文章提出了一种新型输入电压观测的ZCCMPC方法。并进行了仿真和实验验证其有效性。结果表明:
1)输入电压观测器和新型网侧电流预测模型工作有效,简化了采样电路,缩短了时间延迟。
2)利用该策略实现了两步零电流换流过程,优化换流的同时可进一步缩短换流时间。
3)采用此控制策略,提高了硬件平台的采样频率,优化了输出侧电机的电压电流波形正弦特性,实现了电机良好的稳/动态性能,同时实现了网侧的单位功率因数及正弦性输入电流波形。
本研究软件设计及硬件平台已基本成熟,可实现模型预测控制在IMC-IM系统中的深度优化。
进一步的,可重点改进ZCC-MPC方法,以期实现不固定的占空比,可以同时实现性能优化。