面向冰区航行的近场海冰感知与航向决策
2022-05-31谢宗轩王胜正
谢宗轩 李 博 王胜正 刘 卫
上海海事大学商船学院,上海,201306
0 引言
两极地区由于关键的战略地理位置与丰富的自然、矿产资源,受到人们越来越多的关注。在北极地区,随着全球气候变暖造成的海冰覆盖范围缩小,北极航道具有大幅缩短东北亚、欧洲和北美三大经济圈间航线航程的经济效益;国务院于2018年1月发布的首份北极政策文件——《中国的北极政策》白皮书将“冰上丝绸之路”纳入“一带一路”,倡议涉北极国家共同合作,为北极的和平、稳定和可持续发展做出更大贡献[1];在南极地区,《南极条约》虽然禁止开发南极区域矿产资源南极活动以科考活动为主,但从事旅游观光活动的人数也在逐年增长;国家海洋局2018年2月发布的《南极活动环境保护管理规定》中,明确对南极地区所有考察、旅游、探险、渔业、交通等活动进行环境保护管理工作[2]。上述政策与规定除了凸显两极地区的重要性外,也预示着极地航行已进入常态化,为了保障冰区航行安全,开展近场海冰感知的研究十分必要。
冰区航行安全的研究热点包括事故前的冰区航行风险识别及事故后的冰区航行事故风险评价[3]两类。其中,事故前的冰区航行风险识别研究聚焦于采用不同方法,如模糊层次分析法(analytic hierarchy process,AHP)[4]、贝叶斯网络(Bayesian network)[5-6]、模糊故障树(fuzzy fault tree)[7]、离散选择模型(discrete choice model,DCM)[8]等,通过分析风险影响因素(risk influencing factors)提出航行风险评价模型,实现冰区航行的风险评估;事故后的冰区航行事故风险评价研究主要通过专家问卷、事故数据库或航行数据等方式获取定性、定量数据,采用贝叶斯网络[9]、故障树[10]、马尔可夫链(Markov chain)[11]等方法,开展船舶航行风险评估,找出事故发生的根本原因。上述研究为冰区航行安全做出了重要贡献,大多数是从人、机、环、管等方面开展系统性研究,本文研究对象则聚焦于冰区航行中最主要的碍航物——海冰。
在冰情数据来源方面,大部分研究主要通过海冰模型[12-14]、冰图(ice chart)[15]或遥感图像[16]获取海冰信息,本质上属于大尺度数据,对近场与实时掌握海冰冰情的能力较差。实际上,雷达是一种重要的探冰工具,可视为航行员的第二双眼睛,《极地水域船舶航行安全规则(Polar Code)》明确指出,在极地水域航行的船舶应积极配备使用具探冰能力的雷达[17]。在同样采用雷达获取冰情信息的研究中[18-19],多数研究仅采用航海雷达(marine radar)单一传感器,本文则对航海雷达与探冰雷达(ice radar)的图像进行融合,可为近场海冰感知提供更完整的海冰信息。
冰区航行辅助决策是极区自主船舶发展的关键技术,主要研究方向聚焦在航线设计。一部分研究应用图论算法(如RRT[19]与DIJKSTRA[20]算法等)进行冰区航线规划;另一部分研究考虑冰况与船舶操纵特性,以燃料消耗或航行总成本为目标,进行冰区航线优化[21-23]。然而,近场海冰转向避障的研究报道较少,且未充分考虑海冰分布情况、偏航程度与转向角度之间的关系。综上所述,本文以近场海冰为研究对象,通过航海雷达与探冰雷达的融合图像感知海冰信息,进行近场海冰密集度计算,绘制海冰风险感知图像,提出冰区航向决策方法,为冰区航行近场海冰感知与航向决策提供技术支持。
1 冰区航行海冰感知设备
本文的技术路线图见图1。在中国船级社(China classification society,CCS)编写的《极地水域操作手册编写指南》中提到,虽然在不同海况和天气条件下,雷达探测不同特征浮冰块的能力存在一定局限性,但它仍是目前探测冰目标的最有效设备[24]。本文利用航海雷达与探冰雷达的不同特性对近场海冰进行感知。

图1 冰区航行近场海冰感知与航向决策技术路线图Fig.1 Technology roadmap of near-field sea ice perception and course decision for ice navigation
航海雷达是船舶必备的导航辅助设备,用于物标的识别与跟踪。航海雷达天线通过发送高速电磁波来确定物标,并将物标反射的回波显示于雷达屏幕上,据此得知物体的位置、方位与距离。其频率较高的X波段(10 GHz)主要在短距离、近场航行场景下使用,有较清晰的图像和较好的分辨率;频率较低的S波段(3 GHz)多用于雨天、雾中航行下的物标识别和跟踪。
探冰雷达同样是基于电磁波理论,定期发出无线电波并接收从冰层和物体反射回来的回波。由于冰的电导率较低且冰盖具有良好的成层性与均一性,相比其他地球物理探测方法,探冰雷达具有很高的穿透能力和对冰川内部层的分辨能力,兼具采集信息量大与效率高等特点。
以上两种雷达对海冰感知的特性有所不同,航海雷达一般能检测较大范围,但对海冰的探测能力相对较弱;探冰雷达可以更好地反映冰厚与冰层纹理,但一般探测距离较短且噪声干扰较多。互补与融合两种雷达的图像信息,有助于提升海冰感知的效果。
2 冰区航行雷达图像融合
即使挑选同一时点两种来源的雷达图像,图像融合也存在冗余信息与空间配准等问题,需要先进行以下处理。
2.1 雷达图像读取与基本信息获取
首先读取同时点航海雷达与探冰雷达的图像,将雷达图像以三维矩阵形式保存,通过图像测量工具分别获取包括图像尺寸、感兴趣区域(region of interest,ROI)、显示方向、量程(range)、距离刻度圈间距、本船位置(Ship)、短期目标位置(Goal)等基本信息。获取的航海雷达图像的基本信息如图2所示,图像尺寸为1920×1080像素(pixels,图中简写为px);ROI为(344,38)、(344,1079)、(1575,38)、(1575,1079)四个坐标点所构成的矩形区域;显示方向为船首向上(head up),艏向180°,指向正北(0°);雷达显示方式为偏心显示,量程设定为6海里(n mile),距离刻度圈2海里对应175像素;本船位置(Ship)即距离刻度圈的圆心,位于(938,844);短期目标位置(Goal)为规划航路(红色虚线)与方位刻度的蓝色交点,位于(1367,55)。获取的探冰雷达图像的基本信息如图3所示,图像尺寸亦为1920×1080像素;ROI为以(540,540)为圆心、以500像素为半径的圆形区域;显示方向为北朝上(north up),艏向180°,指向正南(180°);雷达显示方式为非偏心显示,量程设定为8海里,距离刻度圈2海里,对应125像素;本船位置(Ship)即距离刻度圈的圆心,位于(540,540)。上述基本信息的获取有助于后续对雷达图像的处理与融合。

图2 航海雷达图像基本信息获取Fig.2 Basic information acquisition of marine radar image

图3 探冰雷达图像基本信息获取Fig.3 Basic information acquisition of ice radar image
2.2 冗余信息剔除
观察航海雷达与探冰雷达的原始图像可知,除了海冰感知最关注的雷达回波信息外,还包含各类文字、数字、标示线等冗余信息,须进行筛选与处理。
(1)ROI获取。根据原始图像尺寸与ROI范围信息,创建掩码(mask)矩阵使ROI范围内显示为白色、ROI范围外显示为黑色,通过下式运算获取ROI:
dst(I)=s(I)∧mask(I)≠0
(1)
式中,dst()为输出图像矩阵;I为图像矩阵元素的多维索引;s(I)为输入图像矩阵;mask()为掩码矩阵。
(2)雷达回波提取。航海雷达的回波为黄色、探冰雷达的回波为白灰色,为了更好地提取具有特定颜色的雷达回波,将ROI图像的颜色模型从RGB转换成HSV;进而,设置相应的颜色阈值后,通过下式计算获得雷达回波提取的二值化图像:
dst(I)=lowerb(I)≤s(I)≤upperb(I)
(2)
式中,lowerb()为下边界阈值;s为输入图像矩阵;upperb()为上边界阈值。
(3)标识线修复。ROI图像中除了雷达回波外,仍存在各种标识线的遮挡,将对海冰的提取效果产生干扰,例如在探冰雷达ROI图像内,有3圈黄色距离刻度圈及1条红色船首线等标识线,如图4a所示;进行图像修复时,需创建标识线掩码,明确指出需要修复的区域,如图4b所示;借助标识线边缘区域的像素信息进行图像修复后,可消除上述标识线,如图4c所示。

(a)修复前 (b)修复区域 (c)修复后图4 探冰雷达标识线修复Fig.4 Marking line repair of ice radar image
通过峰值信噪比(peak signal to noise ratio,PSNR)可以检验图像修复效果,该值越大表示失真越小,修复效果越好。图4a中,标识线修复前的PSNR值为30.16 dB;而图4c中,修复后的PSNR值为46.71 dB,修复效果明显。另外,从图4a与图4c右下角的放大图示也可以比对看出标识线已清除干净,修复效果良好。
(4)本船回波剔除。当雷达距离刻度圈圆心上出现范围较小且独立的回波时,可能是由本船钢体船壳所产生的,并不是海冰或其他物标,如图5a所示;为了剔除本船船体的回波,需先检测图像中所有回波的轮廓范围信息,经比对确认与本船位置重叠的轮廓并纪录该轮廓索引号后,即可删除雷达图像中的本船回波,如图5b所示。

(a)剔除前 (b)剔除后图5 本船回波剔除Fig.5 Own ship echo elimination
2.3 空间配准处理
观察2.1节获取的航海雷达与探冰雷达图像基本信息的几何差异,可知图像在融合前须解决空间配准的问题。本文采用固定航海雷达图像,调整探冰雷达图像的方式进行几何变换。
(1)图像旋转。当航海雷达与探冰雷达图像的船艏向角度不一致时,确认旋转角度后,可通过式(3)的仿射变换或式(4)与式(5)的坐标变换进行图像旋转:
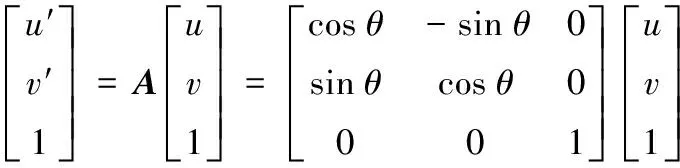
(3)
u′=ucosθ-vsinθ
(4)
v′=usinθ+vcosθ
(5)
式中,(u′,v′)为变换后图像的像素坐标;A为仿射矩阵;(u,v)为原图像的像素坐标;θ为旋转角度。
例如,当航海雷达船艏向指向0°,探冰雷达船艏向指向180°时,将探冰雷达图像逆时针旋转180°后,可获得与航海雷达图像相同的船艏向角度。
(2)图像缩放。当航海雷达与探冰雷达图像每海里对应像素不一致时,确认缩放倍率后,可通过式(6)的仿射变换或式(7)与式(8)的坐标变换进行图像缩放:
(6)
u′=cuu
(7)
v′=cvv
(8)
式中,cu、cv为缩放倍率。
例如,当航海雷达距离刻度圈2海里对应175像素,探冰雷达距离刻度圈2海里对应125像素时,将探冰雷达图像放大1.4倍后,可获得与航海雷达图像每海里相同的对应像素。
(3)图像平移。当航海雷达与探冰雷达图像的本船位置像素不一致时,确认垂直移动量与水平移动量后,可通过式(9)的仿射变换或式(10)与式(11)的坐标变换进行图像平移:
(9)
u′=u+tu
(10)
v′=v+tv
(11)
式中,tu为垂直移动量;tv为水平移动量。
例如,当航海雷达的本船位置位于(938,844),探冰雷达的本船位置位于(540,540)时,将探冰雷达图像向右移动398个像素、向下移动304个像素后,可获得与航海雷达图像相同的本船位置。
2.4 雷达图像融合
经过冗余信息剔除与空间配准处理,确认航海雷达与探冰雷达图像各自的权重后,可通过下式进行图像融合:
dst(I)=s1(I)α+s2(I)β+γ
(12)
式中,s1、s2分别为图像一、图像二的输入图像矩阵;α、β分别为图像一、图像二的权重;γ为添加标量。
两种雷达图像信息的互补与融合有助于后续近场海冰感知应用功能的开发。
3 近场海冰感知应用
为了掌握近场海冰分布的情况,应用第2节融合好的雷达图像,本节建立近场海冰密集度计算与海冰风险感知图像绘制的步骤如下。
3.1 海冰密集度计算
海冰密集度(sea ice concentration)是视野范围内海面上浮冰覆盖的比例量,多以十分法表示。海冰密集度是评估冰区航行安全的重要指标,更是极地操作限制评估风险指数系统(polar operation limit assessment risk indexing system,POLARIS)中计算风险指数结果(RIO)的关键变量[25]。根据国际气象组织(world meteorological organization,WMO)的分级定义[26],本文汇整不同海冰密集度等级的图示与可航行性,见表1。由于传统获取近场海冰密集度的主要方法是通过人工瞭望估算,受天气与人员素质等影响,存在较大的不确定性;本文通过航海雷达与探冰雷达的融合图像进行海冰密集度计算,可获得较人工瞭望估算更精确的计算结果,求解步骤如下:
(1)将分别经过冗余信息剔除与空间配准处理的航海雷达与探冰雷达彩色图像转换为灰度图像后,通过式(12)进行图像融合。
(2)考虑航海雷达与探冰雷达共同覆盖的海域,决定海冰密集度的评估范围,例如以本船位置为圆心、350像素为半径的圆形区域。
(3)通过下式计算海冰密集度CSI:
CSI=c/A
(13)
式中,c为评估范围内非0像素点的总数;A为评估范围的像素面积。
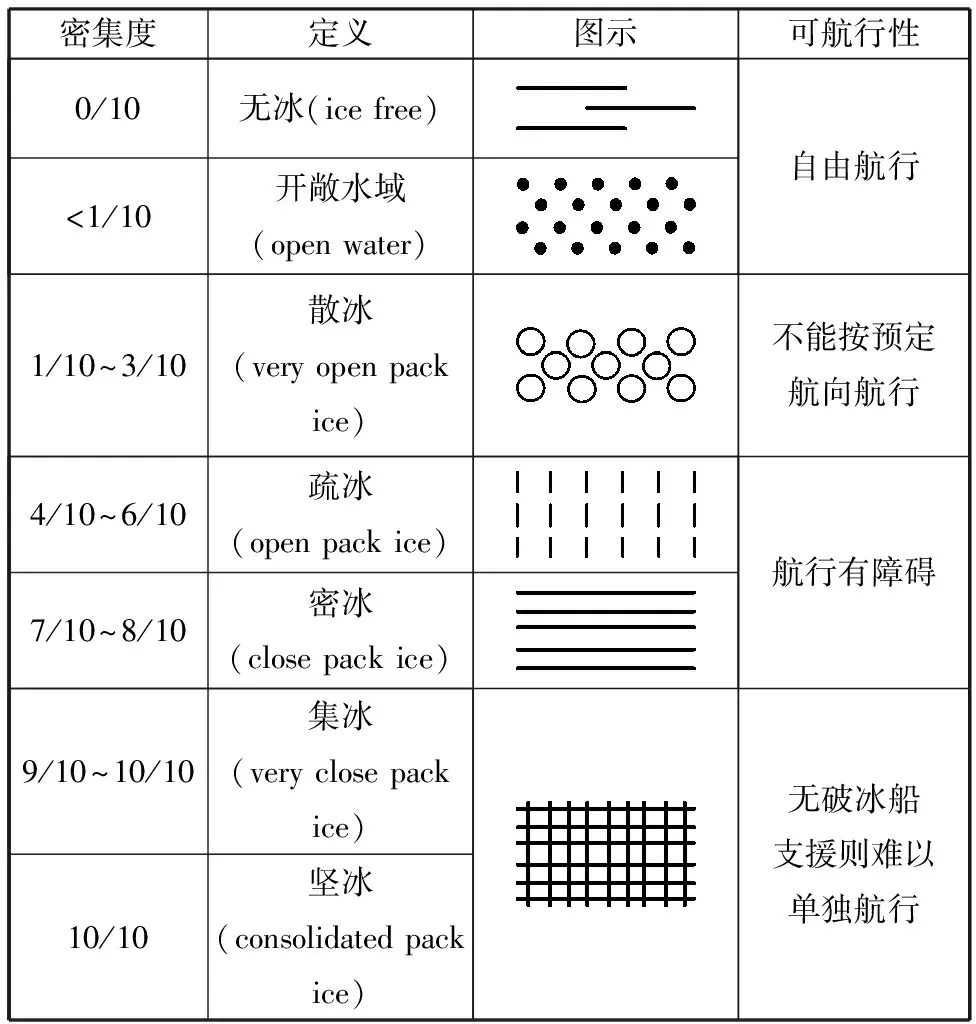
表1 海冰密集度等级Tab.1 Degree of sea ice concentration
3.2 海冰风险感知图像绘制
应用航海雷达与探冰雷达的融合图像进行海冰风险的可视化,绘制步骤如下:
(1)将分别经过冗余信息剔除与空间配准处理的航海雷达与探冰雷达彩色图像转换为灰度图像后,通过式(12)进行图像融合。
(2)通过融合图像的灰度信息绘制海冰风险热力图与等值线图。
(3)将2.1节获取的本船位置与短期目标位置等基本信息标注在热力图与等值线图上。
4 冰区航向决策
为了降低航行冰困风险,减少船舶与海冰的接触,在第3节近场海冰感知的基础上,提出冰区航向决策方法,找出合适的航向角进行船舶操纵。
4.1 船舶领域的构建与扩展
船舶领域(ship domain)是驾驶员想要保持本船周围避免他船或碍航物进入的有效领域,HANSEN等[27]根据4年的海上交通数据对船舶领域的大小和形状进行分析,认为FUJI等[28]提出的长半轴为4倍船长、短半轴为1.6倍船长的椭圆形区域是最合适的船舶领域,如图6所示。

图6 船舶领域示意图Fig.6 Schematic diagram of ship domain
当艏向平行于水平轴时,椭圆形船舶领域(图6中的实线椭圆)可以通过下式计算:
(14)
式中,(x,y)为艏向平行于水平轴时,船舶领域上的各点坐标;(x0,y0)为船舶中心点位置;a、b分别为椭圆形的长半轴与短半轴;L为船长。
当艏向改变时,任意角度的椭圆形船舶领域(图6中的虚线椭圆)可以通过下式计算:
x′=xcosθ-ysinθ
(15)
y′=xsinθ+ycosθ
(16)
(17)
式中,(x′,y′)为艏向任意改变时船舶领域上的各点坐标。
船舶领域仅是最终避免碍航物进入本船周围的边界,为了提前做出转向预判,本文将船舶领域进行扩展,扩展的船舶领域仍可通过上述公式计算。参考避碰行动的行业习惯,扩展的船舶领域其长半轴至少应大于2海里、短半轴至少应大于1海里,可依据船舶的破冰能力进行调整。
4.2 近场水域划分与探测

图7 近场水域划分与探测Fig.7 Near-field water division and detection
根据《国际海上避碰规则》与行业习惯,将扩展的船舶领域划分为正前探测、右舷及左舷等3个区域,如图7所示,船首正前方354°~0°及0°~6°(共12°)为橙色的正前探测区域;6°~112.5°为绿色的右舷区域;247.5°~354°为红色的左舷区域。由于船舶已驶离后方海冰,船尾后方的海冰态势无须考虑。橙色的正前探测区域除了可以判断船首前方的海冰态势以外,还可以通过探测角的改变,作为搜索合适航向的测试工具。其中,探测角为短期目标与艏向之间的夹角,亦为偏航角。
4.3 探测角评估模型
为了比较不同探测角的优劣,考虑海冰密集度与偏航角,构建评估模型如下:
IE=CSIwc+ψwy/180
(18)
式中,wc为海冰密集度权重,取1;ψ为偏航角,不考虑方向性差异;wy为偏航权重,视船首前方的海冰态势,取0或1;IE为探测角评估指数,该值越小越好。
4.4 航向角寻优方法
在4.1节至4.3节的基础上提出冰区航向决策流程,如图8所示,具体航向角寻优方法与步骤整理如下:
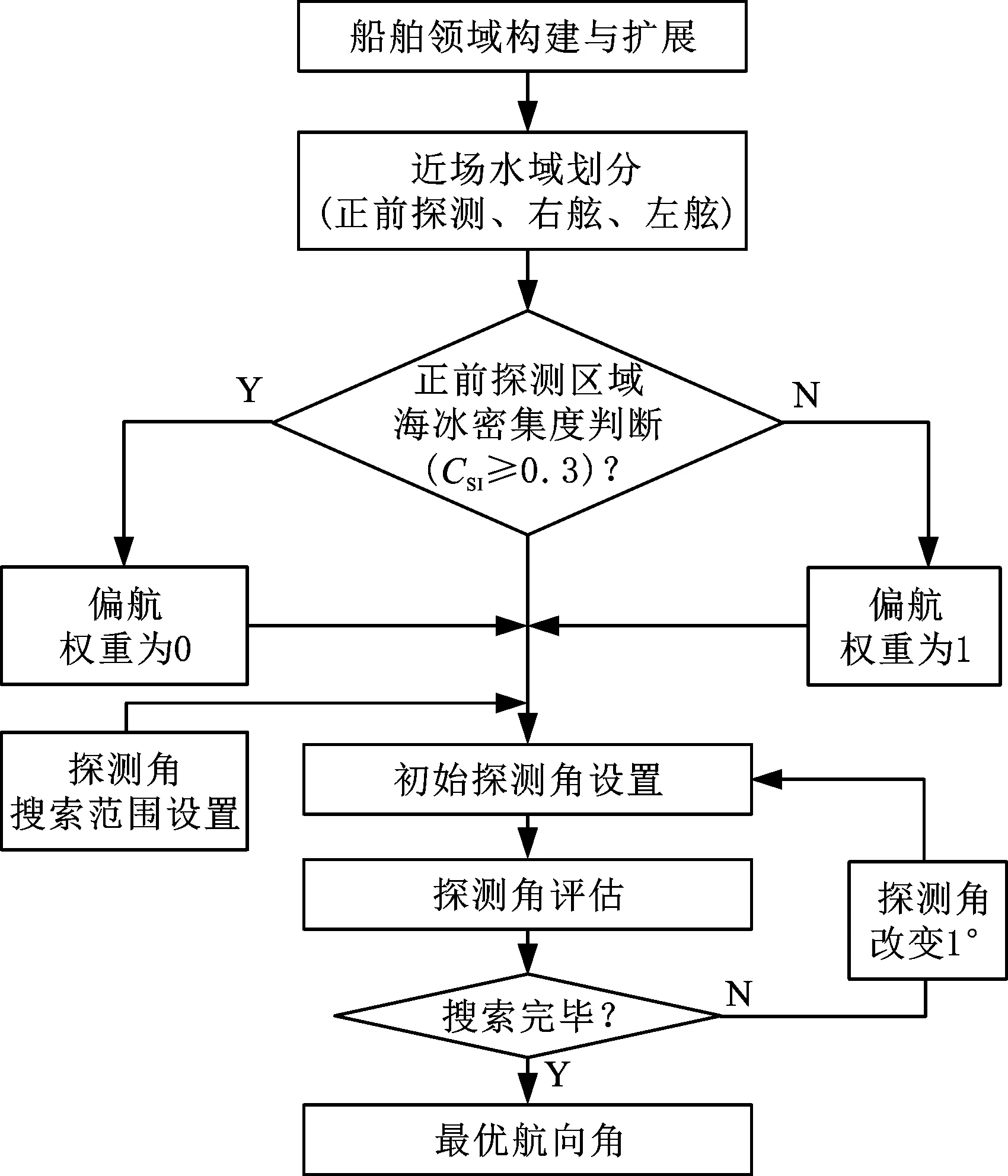
图8 冰区航向决策流程Fig.8 Course decision process in ice region
(1)通过正前区域的海冰密集度判断船首前方的海冰态势,当正前区域的海冰密集度大于或等于0.3时,表示船首前方有明显的碍航海冰,将式(18)探测角评估指标中的海冰密集度权重wc设置为1,偏航权重wy设置为0,仅考虑探测区域的海冰密集度,以航行安全为重;当正前区域的海冰密集度高低于0.3时,表示船首前方海冰稀疏,wc与wy皆设置为1,综合考虑航行安全和效率。
(2)设置探测角的搜索范围,以初始艏向为中心,左右舷各90°的区间(共180°)作为搜索范围。
(3)将搜索范围的区间端值设置为初始探测角,通过式(18)计算初始探测角的评估指数;在寻优过程中,以1°为步长更新探测角,重新计算评估指数,直至搜索完毕。
(4)最小评估指数的探测角即为最优航向角。
5 实例分析
本文搜集2019年极地科考破冰船“雪龙2”号首航南极,从深圳前往中山站执行第36次南极科考任务时的航海雷达与探冰雷达回放视频,进行密集冰场与稀疏冰场的实验。
5.1 密集冰场实例
截取2019年11月19日18:28:57的航海雷达与探冰雷达图像,如图9左侧图像所示,此时“雪龙2”号已航行至南纬66°,周围海冰分布密集且显着。通过第2节的雷达图像融合流程,进行冗余信息剔除、空间配准处理与图像融合后,获得融合的雷达图像如图9右侧图像所示。
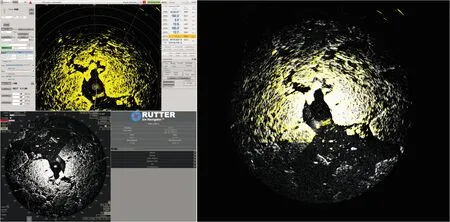
图9 密集冰场的雷达图像融合Fig.9 Radar image fusion of dense ice field
(1)近场海冰感知应用。通过3.1节的求解步骤,以本船位置为圆心、以350像素为半径的圆形区域作为海冰密集度的评估范围,如图10中的红色圆形区域所示,该范围内非0像素点的总数为272 866,面积为384 845像素,经计算得出海冰密集度为70.9%,以十分法表示为7/10,属于航行有障碍的场景。
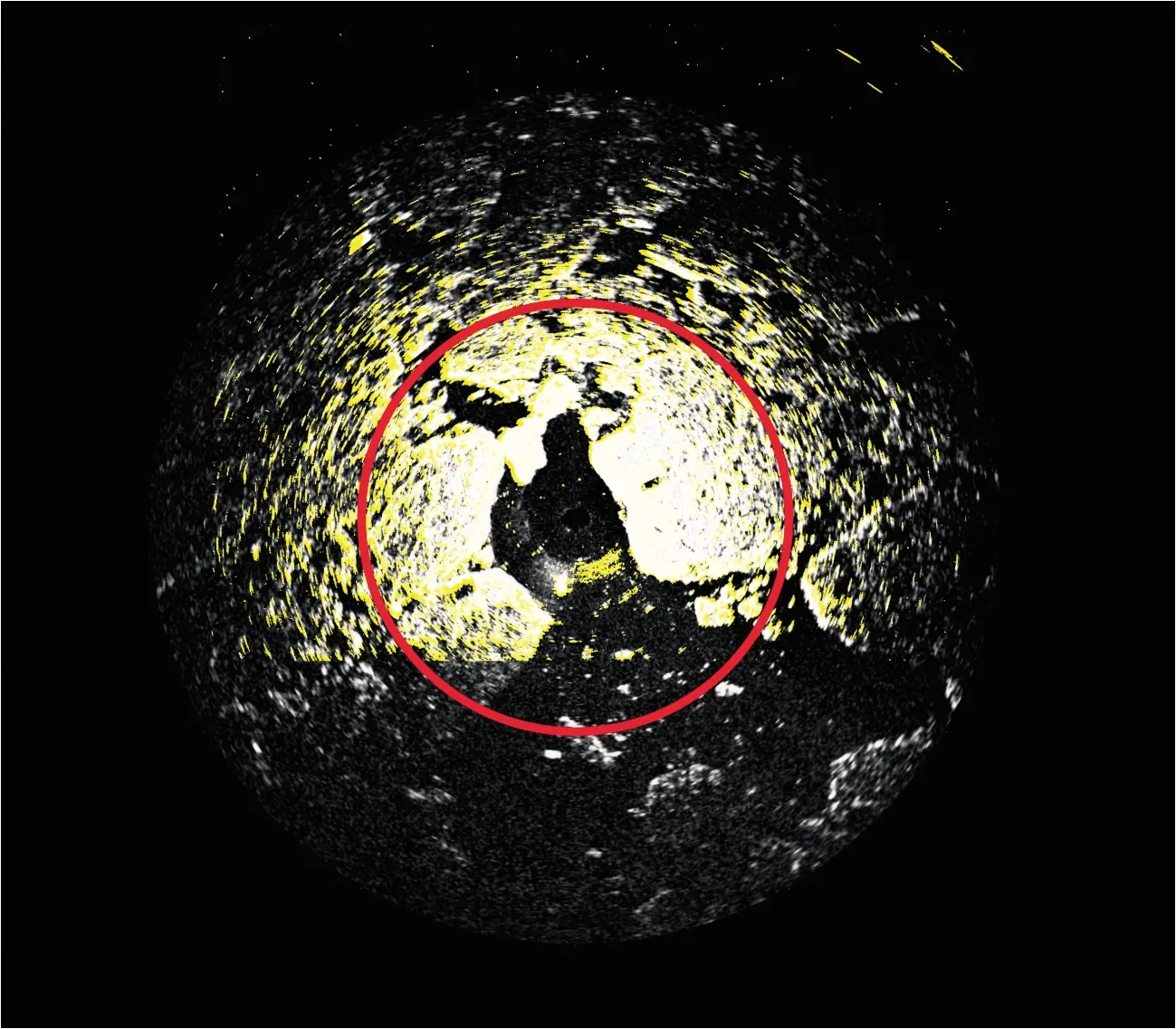
图10 密集冰场的海冰密集度计算Fig.10 Sea ice concentration calculation of dense ice field
为了比较机器计算与人工瞭望估算的结果,咨询中国极地研究中心有丰富极区航行经验的船长,同时调取“雪龙 2”号罗经甲板上监控摄像头的拍摄画面后,发现当经验不足的船员进行人工瞭望估算时,可能未察觉或未考虑稍远处的冰况,出现低估海冰密集度的情况。如图11所示,从摄像画面中可见,通过人工瞭望估计本船周围的海冰密集度约为3/10,明显低估真实情况;本文通过两种雷达图像的融合,可以更宏观且精确地计算海冰密集度。

(a)船首摄像头 (b)右舷摄像头图11 “雪龙 2”号摄像头画面Fig.11 Surveillance camera images of the Xuelong 2
通过3.2节的求解步骤,绘制海冰风险热力图,如图12a所示,特别关注本船周围灰度大于200的高亮海冰;绘制海冰风险等值线图如图12b所示,特别关注本船周围灰度大于210的橘红色海冰。此时融合图像夹杂、模糊,通过海冰风险感知图像有助于凸显高风险海冰所在区域,掌握船舶可能航行的空隙。

(a)热力图 (b)等值线图图12 密集冰场的海冰风险感知Fig.12 Sea ice riskperception of dense ice field
(2)冰区航向决策。首先,由式(14)~式(17),构建与扩展船舶领域,“雪龙2”号船长122.5 m,型宽22.32 m,构建的船舶领域如图13a中的红色椭圆所示;对船舶领域进行10倍扩展,扩展后的长半轴为2.7海里、短半轴为1海里,扩展后的船舶领域如图13a中的绿色实线椭圆所示。进而,如图13b所示,此时初始艏向指向正北(0°)、短期目标位置(Goal)位于本船右舷前方的29°(此时船舶偏航29°)、正前区域的海冰密集度为0.45(CSI≥0.3),如图13b中的橘色扇形区域所示,因此将海冰密集度权重wc设置为1、偏航权重wy设置为0,不考虑偏航程度。最后,以初始艏向为中心、左右舷各90°的区间作为搜索范围,遍历所有探测角,通过式(18)计算各探测角的评估指数,得到最小的评估指数IE为0.438,最优航向角为359°,如图13b中蓝色虚线椭圆的方向所示。因此,本船应该下达左舵1°的舵令进行操船。
(a)船舶领域扩展 (b)最优航向角探测图13 密集冰场的航向决策Fig.13 Course decision of dense ice field
5.2 稀疏冰场实例
截取2019年11月18日21:04:18的航海雷达与探冰雷达图像,如图14左侧图像所示,此时“雪龙2”号刚航行至南纬63°,周围海冰分布稀疏且零星。根据第2节的雷达图像融合流程,获得融合后的雷达图像,如图14右侧所示。
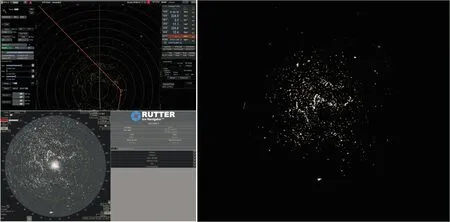
图14 稀疏冰场的雷达图像融合Fig.14 Radar image fusion of sparse ice field
(1)近场海冰感知应用。通过3.1节的求解步骤,以本船位置为圆心、以350像素为半径的圆形区域作为海冰密集度的评估范围,如图15中红色圆形区域所示,该范围内非0像素点的总数为28 192,面积为384 845像素,经计算得出海冰密集度为7.3%,属于自由航行的场景。

图15 稀疏冰场的海冰密集度计算Fig.15 Sea ice concentration calculation of sparse ice field
通过3.2节的求解步骤,绘制海冰风险热力图,如图16a所示,特别关注本船周围灰度大于200的高亮海冰;绘制海冰风险等值线图,如图16b所示,特别关注本船周围灰度大于210的橘红色海冰。此时融合图像暗沉、细碎,通过海冰风险感知图像有助于厘清海冰轮廓,标记需要注意的海冰区域。

(a)热力图 (b)等值线图图16 稀疏冰场的海冰风险感知Fig.16 Sea ice risk perception of sparse ice field
实际上3.1节海冰密集度算法中的非0像素点计数还隐含海冰标记的功能,将已融合的雷达图像二值化后,依据各块海冰的连通区域,可以从“1”开始使用正整数依序对海冰标记序号,如图17的红色数字所示。据此,后续还可对海冰进行追踪和管理。
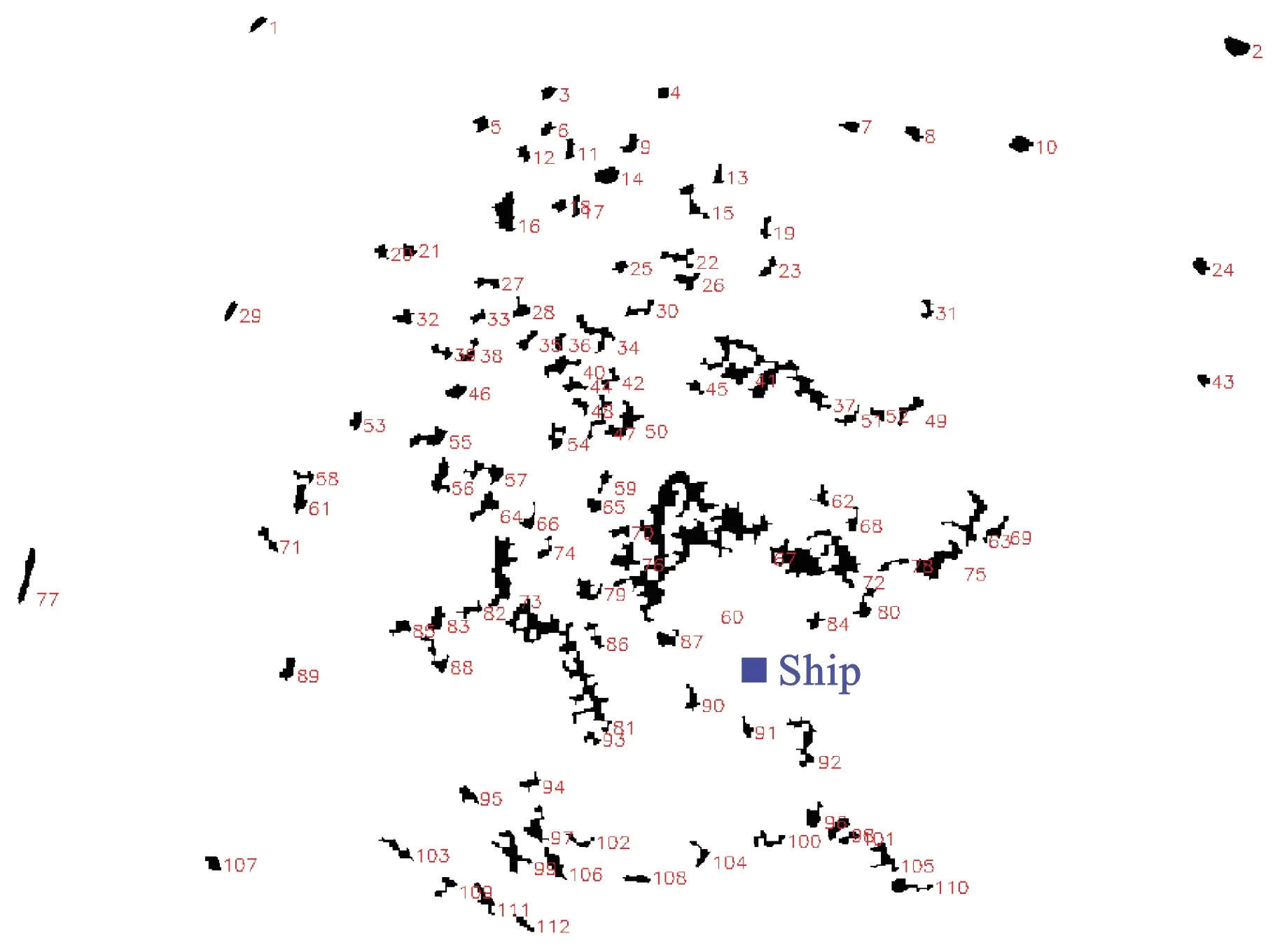
图17 海冰序号标记Fig.17 Sea ice serial number marking

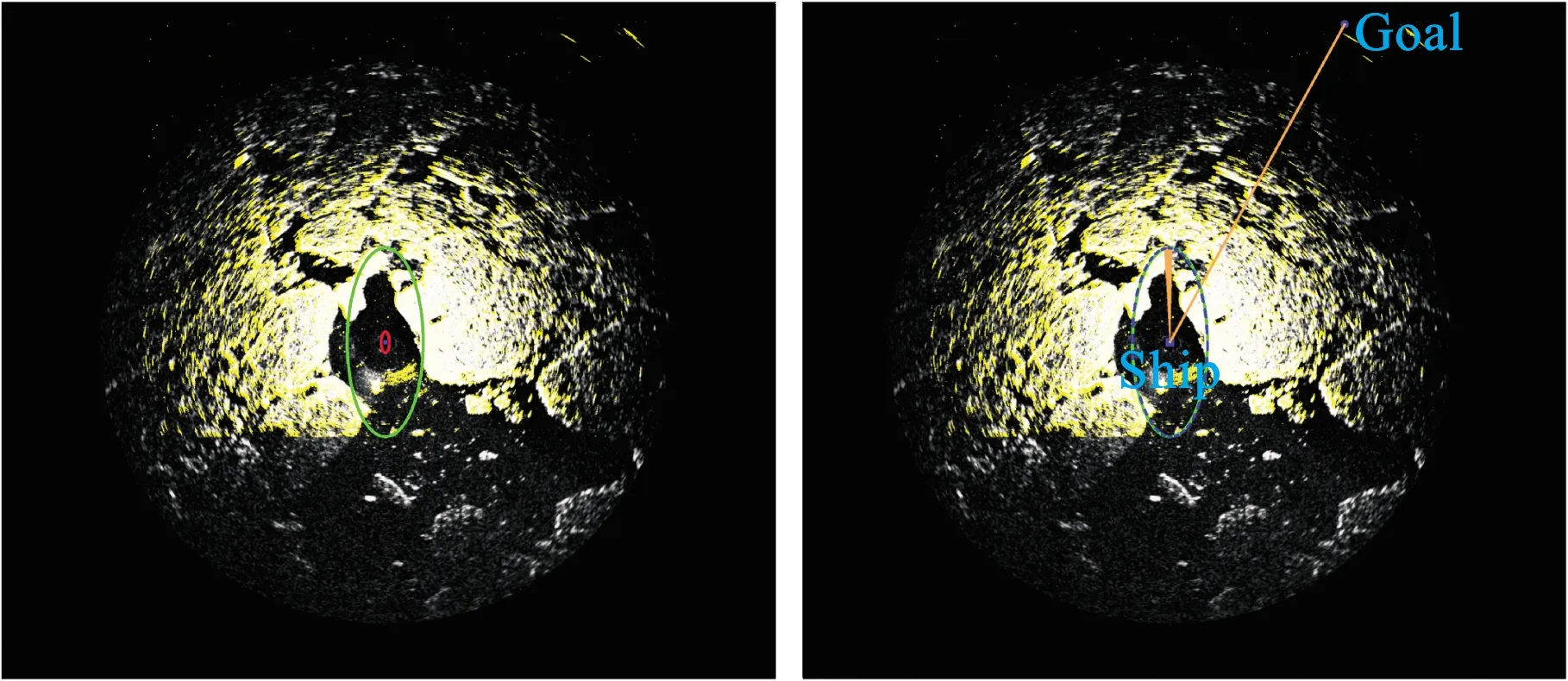
(a)最优航向角探测前 (b)最优航向角探测后图18 稀疏冰场的航向决策Fig.18 Course decision of sparse ice field
(2)冰区航向决策。对“雪龙 2”号船舶领域的构建与扩展同5.1节所述,扩展后的船舶领域如图18a中的绿色实线椭圆所示。此时初始艏向指向正北(0°)、短期目标位置(Goal)位于本船左舷前方的324°(此时船舶偏航36°)、正前区域的海冰密集度为0.07(CSI<0.3),如图18a中的橘色扇形区域所示,海冰密集度权重wc设置为1、偏航权重wy设置为1,综合考虑海冰密集度与偏航程度。最后,以初始艏向为中心,左右舷各90°的区间作为搜索范围,遍历所有探测角,通过式(18)计算各探测角的评估指数,得到最小的评估指数IE为0.160,最优航向角为319°,如图18b中蓝色虚线椭圆的方向所示。因此,本船应该下达左舵41°的舵令进行操船。
算法运行时间决定实际操作是否切实可用。本节实例分析的计算机配置为:“Windows 10”+“CPU:AMD Ryzen 7 4800H with Radeon Graphics 2.90 GHz”+“RAM:16.0 GB”。在密集冰场实例中,完成雷达图像融合、近场海冰感知应用及冰区航向决策,共用时33 s;在稀疏冰场实例中,共用时9.2 s。实际上,算法运行时间受冰场复杂程度、代码逻辑与计算机硬件配置等因素影响,但由上述数据可知,相比船舶驾驶员决策应变过程,本文算法运行时间是高效可行的。
6 结论
航海雷达与探冰雷达图像信息的互补与融合,有助于获取更完整的近场海冰信息。本文利用融合的雷达图像建立海冰密集度计算的求解步骤,相比人工瞭望估算仅至十分位且有低估的风险,机器计算可至百分位,更为精确、可靠;利用融合的雷达图像建立海冰风险感知图像的绘制步骤,通过绘制海冰风险热力图与等值线图,提供更清晰、直观的图示,有助于快速掌握当前近场海冰的风险分布情况;结合船舶领域与避碰规则的思想,综合考虑海冰密集度与偏航程度,提出了冰区航向决策方法,经过搜索与评估可得到最优航向角。
根据实例分析结果,采用本文提出的近场海冰感知方法与冰区航向决策方法,在密集冰场与稀疏冰场都能很好地获得近场海冰的风险分布情况,并即时给予适当的转向建议,对保障极区航行安全具有重要意义。
