RTK结合M9在某水库地形测量中的应用
2022-05-30梁帅
梁 帅
(辽宁省丹东水文局,辽宁 丹东 118001)
实时动态测量RTK(Real Time Kinematic)是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术,能够提供实时的测站点在指定坐标系中的三维定位结果。本文以某水库工程为例,利用实时载波相位差分技术(RTK)采集水库岸上部分坐标,利用M9 测深系统采集水库水面平面坐标和实时水深,并经后期数据处理得到统一坐标系统下的三维坐标,之后利用成图系统生成三维地形图,为水库地形测量提供新思路。
1 工程概况
某水库由土坝、溢洪道、输水洞3部分组成。坝长1 768.0 m,坝顶宽6.0 m,最大坝高9.4 m。水库设计洪水标准为50 a 一遇,校核洪水标准为300 a 一遇,水库校核洪水位22.85 m,总库容1479 万m3,设计洪水位22.38 m,最大下泄流量333 m3/s。水库枢纽工程等别为Ⅲ等,永久性建筑物等级为3级,为多年调节水库,高程基面采用假定基面。
2 地形测量
水库地形测量包括岸上部分和水下部分,一般作业内容包括控制测量、测深点定位、测深、判别底质和绘制地形图,测量时多采用断面法或散点法。为了便于后期数据处理,在水库水位平稳期进行测量,避免水库放水对测量的影响。同时为了限制误差的累积和传播,保证水库地形测图的精度和速度,测量工作需按照“从整体到局部,先控制后碎部”的原则,先进行整个水库的控制测量,之后进行碎部测量,控制测量其实质就是测量控制点的平面位置和高程,之后在利用测得的平面坐标和高程生成水库三维地形图。
2.1 岸上地形测量
岸上地形测量一般可采用GPS 仪器中电台模式或CORS 模式进行测量,坐标系统一般采用CGCS2000。本文岸上地形测量采用GPS 中CORS模式进行测量。要求基准站和流动站卫星定位天线平面15°仰角以上无大片障碍物阻挡卫星信号,同时远离无线电发射源及高压线等;在卫星定位作业过程中,有效观测卫星数不少于4颗,空间精度因子PDOP 值不大于5。首先利用蓝牙将手簿和主机进行连接,接着新建工程,输入工程测量名称;然后,新建坐标系统,同时更改中央子午线,坐标系统选用CGCS2000,以便于后期数据处理和转换;之后设置卫星高度截止角cut off并按照给定的账号密码将仪器接入CORS 站系统,利用CORS 模式进行测量;同时PDOP 精度因子设置成小于5,待仪器成固定解状态开始进行测量。测量过程中需要掌握地形变化的转折点,同时随时查看卫星数量及解的状态,保证在固定解状态下采集数据,并对水库中的关键点进行标记,比如固定点高程等,以便于后期高程的统一。同时,测量时需要对水库水面线进行测量,并绘制草图,标记水库水面线关键点。测量结束后需要将测量的文件导出,主要内容有点号、东坐标、北坐标、高程、经度、纬度、解状态、测量时间等数据,后期可根据需要选取数据。
2.2 水下地形测量
水下地形测量采用M9搭载实时载波相位差分技术(RTK)配置模式,该模式中主机PCM中增加了RTK相关模块及扩频无线电台,需要在岸边设立单独的RTK 基站;该RTK 基站系统主要由RTK GPS接收器、外置的高增益GPS 天线、扩频无线电台调制解调器、外置高增益电台天线和三脚架组成;在工作时岸边的RTK基站和船上的ADP以10Hz的采样频率接收GPS 定位数据,同时RTK GPS 以1Hz 的采样频率从RTK 基站的扩频无线电台给安装在船体上的主机PCM提供校正信号;RTK模式的定位精度能够达到±3 cm,精度很高,能够满足测量要求。
本文水下地形测量采用机船搭载M9 进行测量。利用M9 进行水下地形测量时,首先需要连接好仪器,在岸边架设RTK 基站,基站架设应选在地基牢固、地势相对较高且便于安置仪器的地方,周围无高度角超过15°的障碍物,无强烈干扰接收卫星信号或反射卫星信号的物体。测量开始前检查M9 各仪器的状态;之后设置M9 相关参数,如磁偏角、换能器入水深、盐度、筛选距离、水深参考和坐标系统等参数,RTK 锁定一般需要10 min 左右,需要等主机PCM 中GPS 信号指示灯变绿后才能进行测量;其次在正式测量前需要对仪器进行罗盘校正和系统测试,待仪器一切正常后才能开始操作。正式开始以后,需要在划定的水面范围内进行测量,同时机船驾驶应当平稳,在走航起步时应缓慢,测量过程中应尽量匀速前进,船速不宜过大;在走航结束时应缓慢减速,整个测量过程中要避免急速转弯、急停等操作。仪器走航的密度取决于水库水下地形的复杂程度,在水库重点地形区域,走航密度可以加大。由于水库水面面积相对较大,测量时可根据实际需要标定测量线,按照规定的测线进行测量,以避免遗漏区域。由于M9 测量时采集数据速率很快,可以达到每秒1 组数据,结合船速的控制,可以做到每几十厘米就有一组数据,精度较高。测量结束后使用RiverSurveyorLive 数据处理软件从记录器中下载完整的.riv格式文件,计算机中保存的.rivr 文件数据是不完整的,进行数据处理,导出ASCII 数据,之后对导出的数据进行处理。导出的数据坐标为经纬度格式,需要使用坐标转换软件或Arcgis 对坐标进行批量处理,以满足后期数据处理的要求。
3 数据处理和图形绘制
将GPS 和M9 测量的数据导出后进行整理,首先根据岸上部分水库水面线的数据计算水库静水状态下的水面高程,并用次高程依次减去M9 换能器入水深和M9所测的垂直波束水深,进而得到M9所测数据水下地形中各点的高程,结合M9 所测得经纬度数据,初步得到了水库水下部分的三维坐标高程。GPS 导出数据中的东坐标、北坐标分别为2000 坐标系统下的Y坐标和X坐标,因此需要通过Arcgis 系统软件将M9 中三维坐标系统的经纬度转换成Y坐标和X坐标,以统一整个水库的坐标系统,便于后期成图系统生成水系等高线和三维地形图。
数字地面模型(DTM),指在一定区域范围内规则格网点或三角网点的平面坐标(X,Y)和其地物性质的数据集合,如果此地物性质是该点的高程Z,则此数字地面模型又称为数字高程模型(DEM)。在地形图中,等高线是表示地貌起伏的一种重要手段,在绘制等高线之前,必须先将野外测的高程点建立数字地面模型(DTM),然后在数字地面模型上生成等高线,生成等高线以后可以进一步绘制水库地形图。首先将处理好的数据文件按照点名、空格、东坐标、北坐标、高程的顺序制成.dat文件,按照成图软件的要求定显示区,展高程点,建立DTM 文件,之后按照要求选择合适的高程系数绘制三维模型。水库三维地形图见图1。
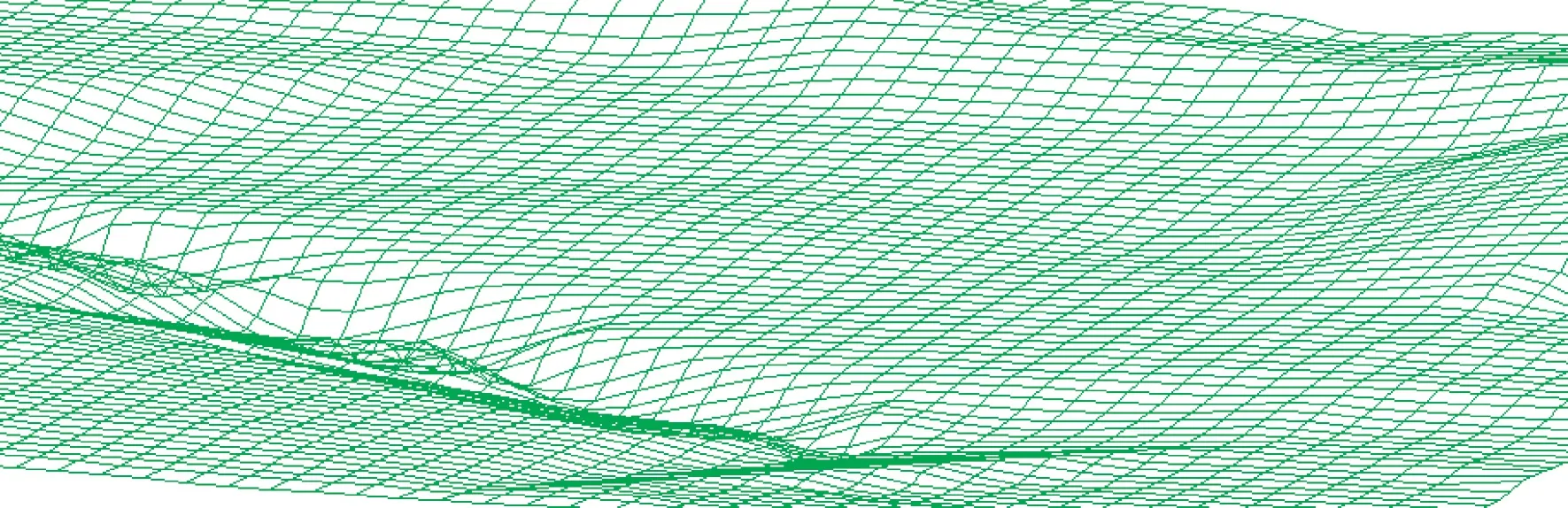
图1 三维地形图
通过水库三维地形图可以比较直观的看出水库的地形变化,了解水库岸上和水下部分的变化趋势,水库是否淤积及淤积地点等,并可以根据测量数据绘制水库库容曲线,进行水库各类参数的计算等工作。
4 结语
利用高精度的实时载波相位差分技术结合M9进行水库地形测量具有可行性,测量数据连续性好,实时性好、定位精度高,对于地形变化的节点控制性好,保证了地形测量的完整性和准确性。基于CGCS2000坐标系统下的RTK技术进行岸上部分测量,采用RTK 配置模式下的M9 对于水库三维坐标的采集具有突出优势,后期二者测量数据结合坐标换算并经特定软件处理,生成的水库三维地形图能够直观地显示出水库地形的变化情况,与传统地形测验相比省时、省力,减少了测量人员的工作量,提高了地形测量的效率。