基于PD控制的电磁轴承-转子系统非线性振动研究
2022-05-30张国荣张鹏飞王志恒邹瀚森
张国荣, 张鹏飞, 王志恒, 席 光, 邹瀚森
(西安交通大学 能源与动力工程学院,西安 710049)
电磁轴承是一种典型的机电一体化产品,因其具有无接触、无需润滑、可施加主动控制以及可实现高转速等特点而在旋转机械、真空和洁净空间等领域得到广泛应用。目前电磁轴承的研究与应用主要基于在平衡点附近对非线性的电磁力进行泰勒展开得到线性化处理后的数学模型[1],而当系统处于极限工况下如转子偏离中心位置较大、器件发生饱和等,此时线性化模型不再适用,因此非常有必要对电磁轴承-转子系统的非线性数学模型进行非线性动力学分析,以加强对系统处于非线性情况下动力学行为的了解,拓宽电磁轴承-转子系统的工作范围。
研究人员针对电磁轴承-转子系统中存在的各种非线性因素对系统特性的影响进行了研究,如系统中存在的时间延迟效应[2]、涡流效应[3]、多重干扰力[4]、饱和现象[5]、陀螺效应[6]、几何耦合[7-8]、转子碰摩[9]、裂纹转子[10]、气流激振力[11]等。这些非线性因素会使系统表现出丰富的非线性动力学现象如分岔、突跳、初值敏感性、多解、混沌现象等,使系统不稳定性增加,影响转子的稳定运转。电磁力与控制电流平方成正比,与距离平方呈反比,本身就是高度非线性的,会使系统表现丰富的非线性特性。Saeed等[12]研究了两自由度电磁轴承-刚性转子系统,发现系统存在广泛的非线性现象,增大扰动力会使系统更容易失稳 ,因此需要更大的比例和微分增益。Zhang等[13]对1∶1内共振及1∶2超谐共振条件下的16级时变刚度电磁轴承-转子系统进行建模并利用摄动法求近似解,观察到该系统中存在周期、拟周期、混沌运动,并且有明显的软硬弹簧特性。非线性对于系统的安全稳定运行是不利的但又是不可避免的,因此需加以控制以尽量扩大系统的安全运行范围。Ghazavi等[14]研究了时变刚度比例-微分控制(proportional-derivative,PD)控制器在增大系统稳定域方面的作用,相比于线性PD控制,采用时变刚度控制后系统发生失稳的偏心量下限提高,系统更加稳定。Chang[15]研究了电磁轴承-转子系统中存在的倍周期分岔及混沌现象,并采用状态反馈控制和抖动控制去控制混沌,发现两种方法都具有很好的抑制混沌的作用。
综上,电磁轴承-转子系统中存在丰富的非线性特性。本文考虑电磁力的本质非线性,即力-电流非线性和力-位移非线性,针对PD控制下轴向电磁轴承-转子系统建模并进行非线性动力学分析,具体探究控制器参数以及外部扰动力对系统软硬弹簧特性的影响。并在特定参数下探究随着扰动频率的增加,系统所发生的分岔行为。
1 分析模型
轴向电磁轴承-转子系统的简化图,如图1所示。传感器检测到转子偏离设定位置的位移,将偏移信号反馈至控制器,控制器会发出位置调整信号,经功率放大器后转换为电流作用到电磁铁线圈,产生电磁力将转子拉回到预定位置。轴向电磁轴承-转子模型属于单自由度。为方便分析,忽略磁饱和、磁泄漏以及涡流效应等非线性因素,无几何耦合,转子为刚性转子模型。
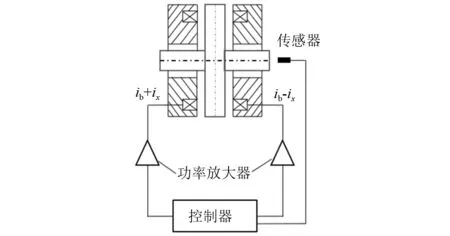
图1 控制系统结构Fig.1 Control system structure
1.1 非线性电磁力模型
磁体的作用力产生在不同磁导率介质的边界上,电磁力的计算是基于场能理论。电磁轴承-转子系统的磁路模型,如图2所示。

图2 磁路模型Fig.2 Magnetic circuit model
图2中:i为作用到电磁铁线圈的控制电流;C为圆盘与电磁铁的间隙;Aa为电磁铁横截面积。
储存在气隙体积Va=2CAa中的能量为
(1)
式中,Ba,Ha分别为磁通密度和磁场强度。根据虚位移原理,单个电磁铁的电磁力为
(2)
式中,μ0为真空磁导率。根据安培环路定理,并假设磁路中的磁场沿铁芯和气隙都是均匀的,再利用B=μ0μrH,可得
(3)
式中:μr为相对磁导率;lfe为平均铁芯磁路长度;N为线圈匝数。铁芯在不考虑磁饱和情况下有μr≫1,因此
(4)
将式(4)代入式(2)
由于一对电磁铁采用差动控制,故轴向电磁轴承所施加的电磁力为
(5)
式中:ib为偏置电流;ix为控制电流;C0为圆盘与电磁铁之间的额定气隙;x为转子偏离基准位置的位移。
1.2 动力学模型及其无量纲化
对于轴向电磁轴承-转子系统,转子可视为一集中质量,假设无碰摩现象出现,推力盘受到周期扰动力影响,则转子轴向运动方程为
(6)
式中:x为圆盘偏离设定点的位移;m为转子质量;Fmag为施加的电磁控制力;f为扰动力幅值;ω为周期扰动的角频率;t为物理时间。
采用PD控制器,当转子偏离中心位置x时,控制电流为
(7)
将式(5)、式(7)代入式(6)

(8)
为方便分析,定义以下无量纲量,将式(8)无量纲化。
则式(8)变为

(9)
将式(9)基于基准点X=0进行Taylor展开到三阶,整理后得到
(10)

轴向电磁轴承-转子系统参数,如表1所示。将其代入式(10)中即可得到无量纲动力学方程。
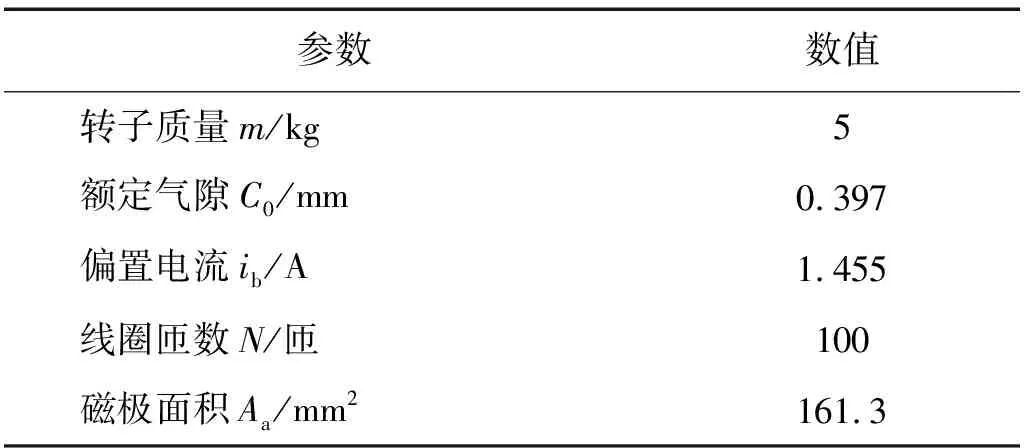
表1 轴向电磁轴承-转子系统参数Tab.1 Axial magnetic bearing-rotor system parameters
2 系统软硬弹簧特性影响因素研究
软硬弹簧特性反映了非线性系统固有频率与振动幅值的关系,会引起多值及突跳现象的发生,是非线性系统区别于线性系统的一种重要特征。动力学方程式(10)的系数均依赖于无量纲比例增益Kp和无量纲微分增益Kd两个参数。因此本节主要研究这两个参数以及扰动力对轴向电磁轴承-转子系统主共振时软硬弹簧特性的影响。
应用多尺度法对式(10)进行近似求解以及稳定性分析。多尺度法可同时求解稳定解与不稳定解[16]。因此式(10)变为
(11)
式中,ε≪1。
引入两个时间尺度T0=t,T1=εt。T0为快时间尺度,T1为慢时间尺度。
本节主要研究主共振情况,利用失调系数σ衡量扰动频率与派生系统固有频率的接近程度,即Ω=ω0+εσ。
设式(11)的解为
X=X0(T0,T1)+εX1(T0,T1)
(12)
两种时间尺度的微分算子为
将以上算子连同式(12)代入式(11)。整理并分离ε的同次幂,得到
ε0为
(13)
ε1为

(14)
式(13)解的复数形式为
(15)

(16)
将式(15)代入式(14)中,整理后令永年项系数为0,得
将式(16)代入上式,分离实虚部,并且引入φ=σT1-β得到自治微分方程
(17a)
(17b)

(18)

(19a)
(19b)
因此,稳定周期解需满足式(19)中Jacobian矩阵的特征值实部为负。
主共振幅频特性曲线的骨架线对于软硬弹簧特性的判定具有决定性作用,当骨架线幅值随失调参数σ增加而增大时系统呈现硬弹簧特性,反之则呈软弹簧特性。骨架线的方程为
(20)



2.1 计算方法验证


图3 近似解与数值解对比Fig.3 Comparison of approximate and numerical solutions
2.2 扰动力幅值的影响


图4 不同扰动力幅值下主共振幅频特性曲线(Kp=1.3, Kd=0.02)Fig.4 Frequency-response curves under different amplitude of disturbance force(Kp=1.3, Kd=0.02)
2.3 比例增益Kp的影响
选取Kd=0.02,当Kp由1.1变化到1.3时,如图5(a)所示。系统呈现硬弹簧特性,并且幅频特性曲线随着Kp增大逐渐向右偏,硬弹簧特性加强。当Kp继续增大,由1.4增大到2时,如图5(b)所示。系统特性逐渐变软,但依然表现为硬弹簧特性,同时在各频率下系统稳态响应幅值减小。当Kp=2时,根据判断条件(1),此时系统呈软弹簧特性,但多值区域非常小。继续增大Kp使Kp>2,判断条件(1)恒成立,系统幅频响应曲线开始往左偏,系统呈现软弹簧特性,且Kp越大多值区域越大,软弹簧特性越明显,同时各频率下稳态振动的幅值随Kp增大而逐渐减小。通过上述分析,无量纲比例增益Kp对系统软硬弹簧特性影响较明显,随着Kp变化,系统特性在软弹簧与硬弹簧之间切换。
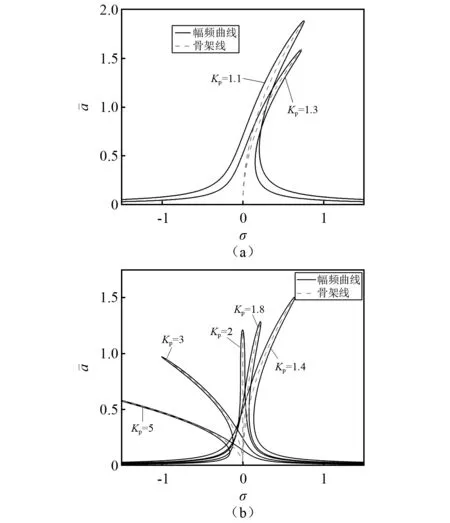
图5 不同比例增益Kp下幅频特性曲线(Kd=0.02, F=0.1)Fig.5 Frequency-response curves under different proportional gain Kp(Kd=0.02, F=0.1)
2.4 微分增益Kd的影响
综上所述,PD控制下比例增益Kp和微分增益Kd均会影响系统的软硬弹簧特性。当Kp和Kd变化时会使系统在软弹簧与硬弹簧特性之间切换。利用骨架线方程可以准确判断系统表现软弹簧还是硬弹簧特性。当微分增益Kd较大时,幅频特性曲线会分裂成不相连的两部分,此时系统不再表现突跳现象。扰动力影响稳态振动的幅值而不影响系统的软硬弹簧特性。
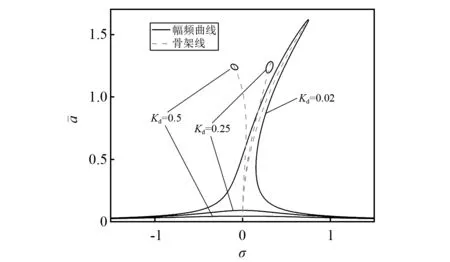
图6 不同微分增益Kd下幅频特性曲线(Kp=1.3, F=0.1)Fig.6 Frequency-response curves under different differential gain Kd(Kp=1.3, F=0.1)

图7 Kd=0.5时幅频特性曲线及稳定域(Kp=1.3, F=0.1)Fig.7 Frequency-response curve and stable solution region when Kd=0.5(Kp=1.3, F=0.1)
3 系统非线性振动及分岔
使用Runge-Kutta法对式(10)进行数值计算。选定参数F=0.1,Kp=1.6,Kd=0.02,无量纲扰动频率Ω范围为0~2.5,幅频特性曲线如图8(a)所示。实线代表稳定解,虚线代表不稳定解。当Ω不断增大时,系统响应的幅值先逐渐增大,在某一个转速下出现幅值“突跳”现象,即系统响应幅值由一个较大值突然降到较小值,这是由于幅频曲线中一个解支不稳定,发生鞍-结点分岔。图中虚线方框部分的放大图如图8(b)所示。随着扰动频率Ω由1.650增大到1.656 6,系统周期解逐渐发生失稳,发生二次Hopf分岔,由周期-1振动变为拟周期振动。
当Ω=1.4时,略去开始的瞬态振动,取其稳态振动分析,时间历程图如图9(a)所示。相图表现为一个椭圆轨道,如图9(b)所示。Poincare截面上只有一个点,如图9(c)所示,证明此时相轨线周期性的穿过Poincare截面,为周期-1振动。功率谱分析结果显示在归一化频率为1处有较大的功率,二倍频及三倍频处幅值较小,如图9(d)所示。因此,当Ω=1.4时转子的振动形式主要表现为周期-1。
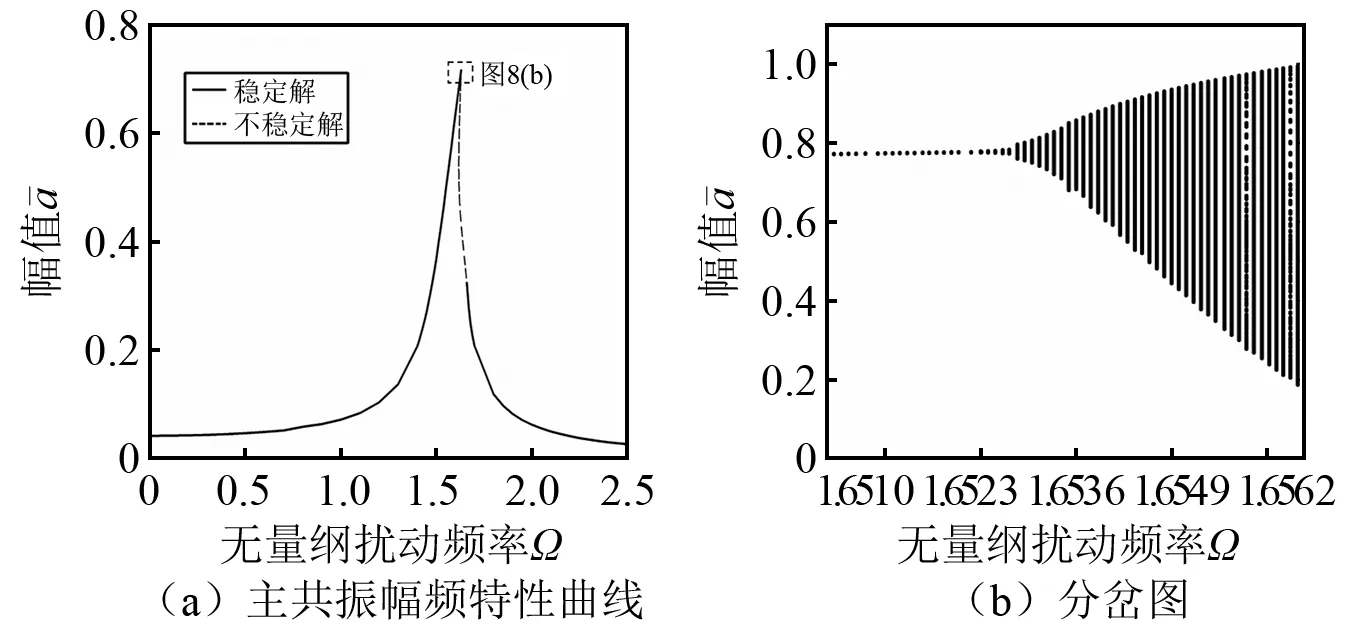
图8 F=0.1, Kp=1.6, Kd=0.02时频响曲线及分岔Fig.8 Frequency-response and bifurcation diagram at F=0.1, Kp=1.6, Kd=0.02
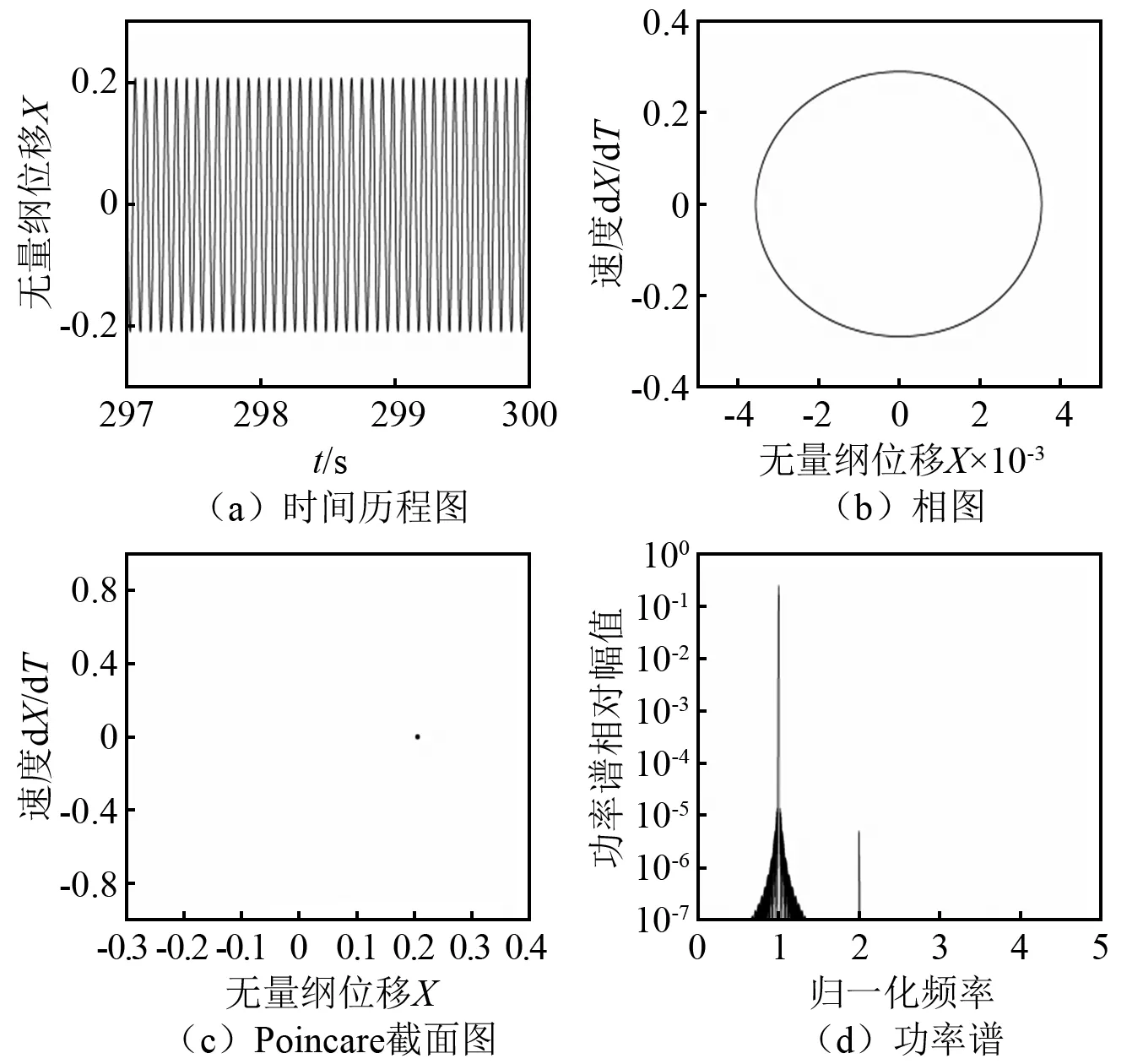
图9 当Ω=1.4时分析图Fig.9 Analysis diagram when Ω=1.4
当Ω=1.655时,略去瞬态部分后的稳态时间历程图,如图10(a)所示。该参数下振动形式好像被一低频信号调制,产生了拍振现象。相图表明运动没有周期性,但相轨线限制在一个环形区域内,如图10(b)所示。Poincare截面上的点形成一闭合曲线,如图10(c)所示,可确定此振动为拟周期振动。功率谱相对Ω=1.4有较大变化,谐波成分增加,在低频fb=0.053处存在幅值,在基频f0附近出现了f0±fb等相近的频率成分,在各倍频附近也出现同样现象,如图10(d)所示。拍振可以看做低频信号fb对频率为f0的载波的调制,低频信号的产生是系统非线性特性的体现,此时f0/fb为无理数,因此为拟周期振动。拍振将影响系统控制的稳定性以及控制的精度[18],另外发生拍振一般会使转子偏移量增大,很容易发生转子与定子碰摩,对系统安全造成威胁。

图10 当Ω=1.655时分析图Fig.10 Analysis diagram when Ω=1.655
4 结 论
本文对基于PD控制的单自由度轴向电磁轴承-转子系统的非线性特性进行了研究。利用多尺度法研究了控制器参数以及扰动力对系统的主共振幅频特性曲线的影响,并利用四阶Runge-Kutta法对特定参数下的非线性响应进行了计算,得出以下结论:
(1) 由骨架线方程导出的判断准则可用于判断电磁轴承-转子系统的软硬弹簧特性。当控制器比例增益、微分增益变化时,系统会在软弹簧与硬弹簧特性之间切换。
(2) 扰动力幅值不会影响系统软硬弹簧特性,但扰动力越大,系统稳态振动幅值越大,共振区域变大。
(3) 微分增益较大时系统主共振幅频特性曲线发生分裂,稳定解部分不再具有突跳现象。微分增益越大,稳态幅值越小。
(4) 当扰动频率改变时,系统发生二次Hopf分岔现象,振动由周期-1变为拟周期,随后幅值发生“突跳”,发生鞍-结点分岔。拟周期振动时产生拍振现象,可认为是一低频信号对基频信号的调制。