周期性来流扰动对通气超空泡航行体流体动力特性的影响
2022-05-30何广华朱一舟潘雁甲
何广华, 杨 豪, 王 威, 朱一舟, 潘雁甲
(1. 哈尔滨工业大学(威海) 海洋工程学院,山东 威海 264209;2. 山东船舶技术研究院,山东 威海 264209)
水的密度远大于空气,因此运动体在水中受到的阻力约为空气中的850倍。常规武器的水下运动速度较难超过35 m/s,但是借助超空泡的包裹可使其在水中的摩擦阻力减少约90%,极大地提高了航速,因此很多国家都极为重视这项技术的研究与应用。超空泡减阻技术已经对海战武器的研发产生巨大的影响,将未来海战带入海空一体的超高速的科技时代[1]。
因自然空化的超空泡所需航速较高,为实现低速条件空化减阻,Reichardt[2]最先提出依靠人工通气的方式形成通气超空泡,以通气量改变空泡尺度变化。主动通气的方式使航行体形成超空泡不再受严苛的速度条件限制,更易于实现加速。但是,航行体在水中还会经常受到前方不稳定来流或海面波浪的影响,这都对航行体的空泡形态及流体动力带来不利影响。随着航行体速度研究的进一步深入,来流速度扰动对空泡的影响问题受到了极大关注。
Lee等[3-4]分析了阵风发生器的扰流条件与海况的关系,研究来流的垂向扰动对轴对称通气超空泡的影响及水翼摆动频率和摆角幅值对空泡形态的影响。Lee等[5]还给出了支撑结构对空泡形态的影响,发现后支撑结构影响空泡的闭合形式,前支撑结构放大了流动的不稳定性。Karn等[6-7]研究了垂向扰动来流条件下,通气率、来流速度、空化器尺度对通气超空泡生成和溃灭的影响;并针对通气滞后问题进行系统研究。Shao等[8-9]用试验方法系统地研究水翼不同摆角幅值和摆动频率引起的垂向扰动环境下,通气超空泡的形态变化,给出通气率和空化器尺寸的影响规律。王威等[10-11]利用数值模拟法,研究垂向流速周期性变化的扰动对通气超空泡航行体的空泡形态演化及流体动力变化影响。Huang等[12]通过数值模拟研究不同摆动频率和摆角幅值引起的周期性来流垂向扰动下的通气超空泡,得到空泡形态及内部压力波动规律。
当前,对水平方向来流扰动影响通气空泡航行体多相流动影响的研究并不多见。本文着重研究航行体在水平方向周期性来流扰动作用下的多相流动特性,给出空泡形态的非定常变化特性及航行体流体动力波动规律。
1 数值计算模型
1.1 控制方程
1.1.1 动量方程
(1)

1.1.2 连续性方程
(2)
1.1.3 体积分数方程
(3)
式中,αg为气体体积分数,αg+α1=1,α1为水体积分数。
1.1.4 湍流方程
根据文献[13]中计算通气空化流动的方法,本文选择RNGk-ε湍流模型,以便处理高应变率和流线弯曲程度较大的流动,k和ε的输运方程为

(4)
(5)
1.2 验证模型及边界条件设置
实际海况中的水流影响极为复杂,Lee等为分析空泡多相流动机理,将航行体的复杂来流条件适当简化为一种周期性的垂向来流扰动。本文参照Lee等的试验设置,将水平方向的来流扰动简化为周期性扰动,利用UDF(user-defined function)使水翼对向摆动以产生水平方向的周期性来流扰动条件,为了避免支撑结构的不利影响,采用无支撑结构的航行体模型,如图1所示。航行体全长12D,中间圆柱段的最大直径D=0.04 m,空化器端面直径Dn=0.3D,通气口直径为0.075D。
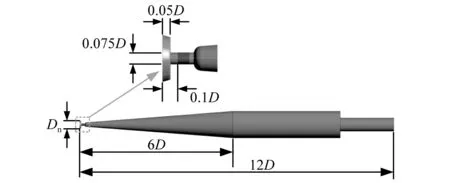
图1 航行体模型Fig.1 Vehicle model
计算模型的流域参数如图2所示。上游的阵风发生器由两片NACA-0020型号的水翼组成,流场左侧及四周边界都设置为速度入口,速度为20 m/s,方向与x轴平行向右;流场右侧为压力出口;水翼、空化器及航行体表面都设置为壁面边界条件;通气口设置为质量流量入口,且通气率系数Cq=0.15;本文采用滑移网格法,用一对重合的圆柱交界面将流域分为:包围水翼的圆柱形动域、圆柱之外的静域,两部分流域通过交界圆柱面的相互滑动实现水翼的摆动。通过网格收敛性验证,分别改变网格密度和时间步长得到适合的参数设置(网格数量为100万,最小时间步长为5×10-5s)以保证计算的准确度。

图2 计算模型流场参数Fig.2 Flow field parameters of computational domain
2 模型验证
水翼同向摆动的计算结果与Lee等的试验数据进行比较验证,计算流域布置如图3所示。将监测点B处测得的垂向速度及空泡形态进行对比,具体验证结果见2019年王威等的研究。
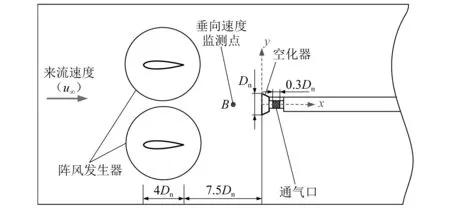
图3 模型验证的空化器及阵风发生器Fig.3 The cavitator and gust generator model of validation
3 计算结果及分析
3.1 流场参数分析
本文着重研究来流速度周期性波动对空泡稳定性的影响,水平速度的波动通过上游水翼的周期性反向同步摆动作用实现,如图4所示。

图4 水翼反向摆动的方向Fig.4 Reverse swing of hydrofoils
根据2019年王威等的研究,设定速度入口的水平来流速度u∞=20 m/s, 水翼摆动频率f=20 Hz, 摆角幅值θ0=6°,并在空化器上游1.75D处设置监测点,得到该处水平速度u和垂向速度v。三个周期内两种水翼摆动方式对流场速度的影响,如图5和图6所示。无量纲时间T=t/T0,其中周期T0=1/f,水翼的同向摆动主要影响流场的垂向速度,水平速度变化较小;而反向摆动则主要使水平速度产生周期性变化,对垂向速度影响微小。说明利用两片水翼反向摆动可以产生规则的周期性水平来流条件。

图5 不同摆动方式的水平速度变化Fig.5 Horizontal velocity changes in different swing modes
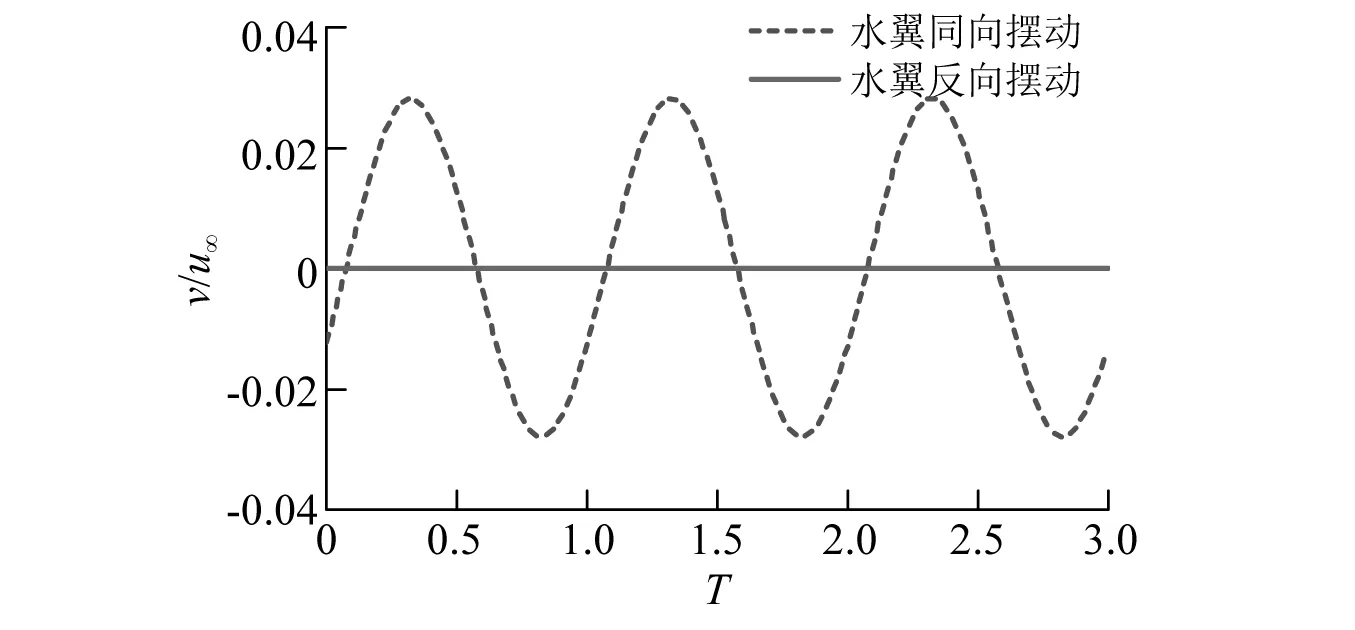
图6 不同摆动方式的垂向速度变化Fig.6 Vertical velosity changes in different swing modes
参照水洞试验固定监测点和数值模拟固定监测线的方法,本文在流域下游沿流动方向布置了直线,以监测流域的水平方向的速度波动情况,如图7所示。沿流场宽度方向平均布设监测线,分别距航行体轴线1.25D,1.88D,2.50D和3.13D处,在来流速度20 m/s、水翼反向摆动频率f=20 Hz、摆角幅值θ0=6°情况下,水翼摆回到初始位置时的流场水平速度分布,如图8所示。由图8可知,1.25D处由于距离航行体过近,受到空泡周围流场扰动较大,导致速度分布曲线不很光顺;而3.13D处则由于靠近边缘,流场速度受到水翼摆动的影响减弱,导致波幅降低;1.88D和2.50D处的水平速度分布曲线基本重合,说明监测线的侧向位置对监测结果的影响不大,后文选择在距航行体轴线2.50D处的监测结果进一步分析。
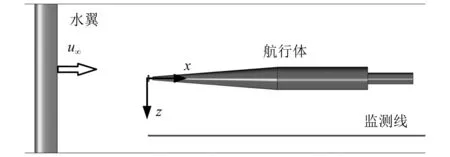
图7 流场俯视图中监测线的位置Fig.7 The position of the monitoring line in the top view of the flow field
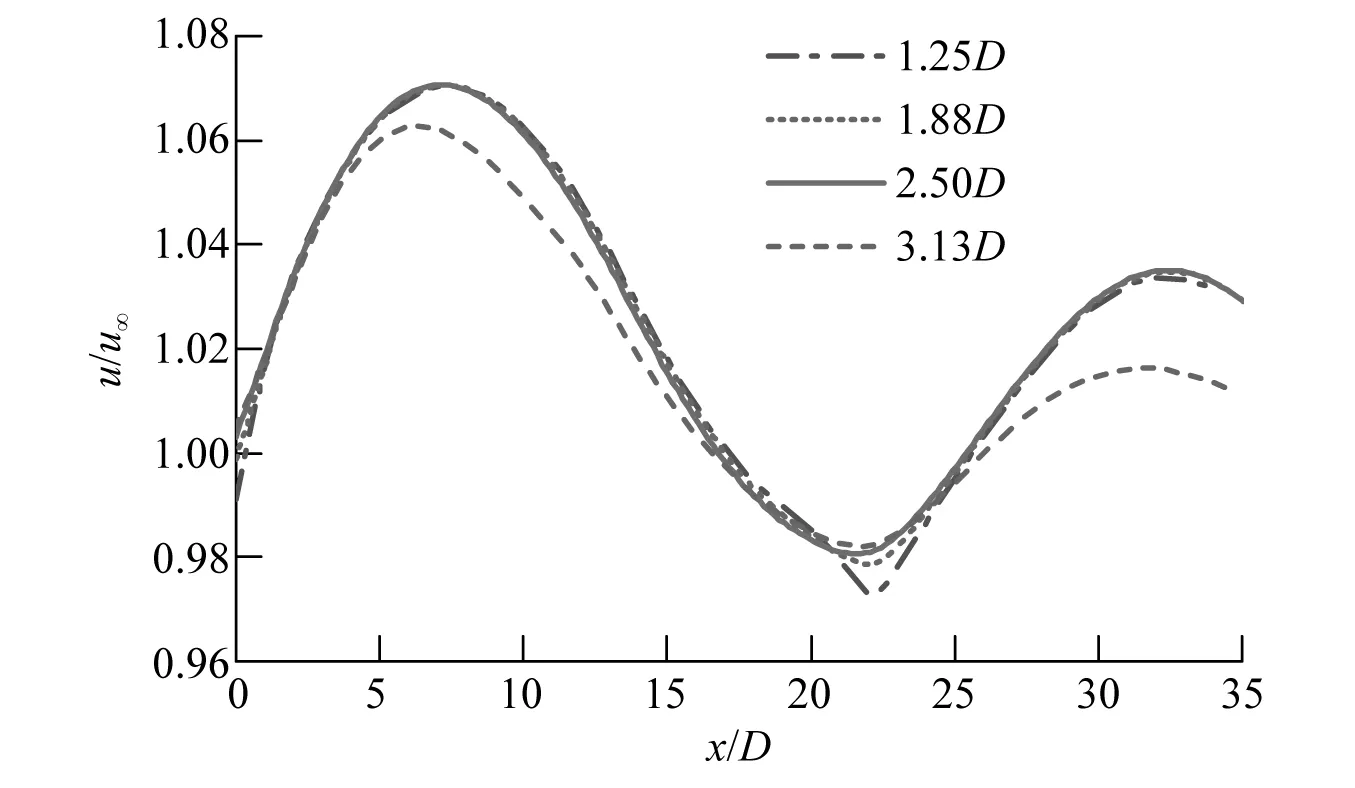
图8 不同监测线处的水平速度分布Fig.8 Horizontal velocity distribution at different monitoring lines
依次改变水翼摆动频率f和摆角幅值θ0,结果如图9和图10所示。在摆角幅值θ0=6°条件下,随着摆动频率的增大,波长逐渐减小,这符合波长λ=u∞/f的规律;受水黏性的影响,水翼摆动对水平流度幅值影响沿下游逐渐减小,水平速度波峰的逐渐降低(见图9)。由图10可知,当水翼摆动频率f不变时,摆角幅值θ0越大,流场中周期性来流的波幅就越大,即水翼摆动对水平速度产生的影响越明显。

图9 不同阵风流频率下的水平速度分布(θ0=6°)Fig.9 Horizontal velocity distribution under different gust flow frequencies(θ0=6°)
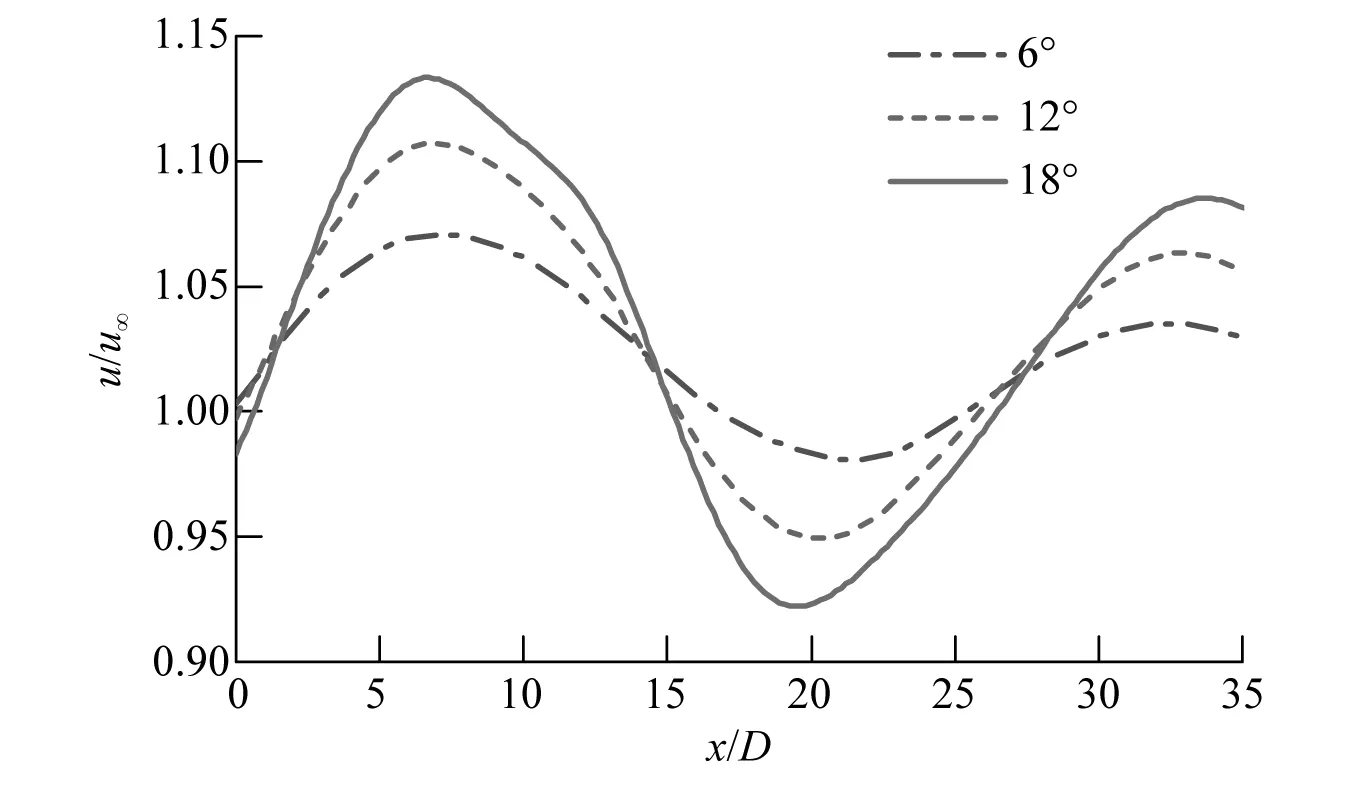
图10 不同摆角幅值下的水平速度分布(f=20 Hz)Fig.10 Horizontal velocity distribution under different swing angle amplitude(f=20 Hz)
3.2 周期性来流对空泡形态的影响
波长λ和波幅度ε是波的两个要素,这两者共同影响空泡形态。水翼摆角幅值主要影响波幅,而摆动频率主要影响波长。流域的波长可根据λ=u∞/f获得,因波幅会沿着下游方向逐渐减小,因此在空化器前方1.75D位置监测来流水平速度变化,取最大值与最小值的差值作为周期性来流的波高h。
波幅ε为波高h的一半,根据Lee等的研究方法,取无量纲波长L和无量纲波幅A,无量纲化的计算公式为
(6)
(7)
在式(7)中,由于Lee等主要针对垂向速度周期性变化的来流,无量纲波幅采用试验所得流域最大垂向速度vmax进行处理。本文无量纲波幅采用扰动后来流速度的最大值和最小值差值(即波高)的一半进行处理。
取不同来流条件下的空泡形态,如表1所示。从表1可知,水平来流速度周期性扰动时,空泡会表面出现多处颈缩,频率f较大(如工况3,无量纲波长大)或摆角幅值θ0较大(如工况6,无量纲波幅大)时,航行体表面会产生沾湿区域(航行体表面未被空泡包裹的区域),沾湿区域将对航行体的流体动力产生重要影响,若航行体的沾湿区域继续扩大,空泡会存在溃灭风险,影响航行体通气空化减阻,甚至造成航行体运动失稳。Lee等的试验研究表明:垂向的周期性扰动影响通气空泡长度,但对空泡直径的影响不大。选取空泡形态较完整的工况4,进一步分析水平方向的周期性扰动将对空泡尺度的影响,如表2所示。
从表2可知,空泡形态在一个周期内的演化过程,上游水翼的摆角幅值较大,使流域中的波幅A偏大,水平方向的周期性扰动使空泡的尺度也会发生周期性变化。周期初始时刻(0T),受来流扰动影响,流场压力发生变化,空泡尾部开始出现颈缩,伴随着部分泡体脱落,空泡长度减小,空化数增大(0.25T);缩小后的空泡内部再次得到空气补充,泡内压力逐渐恢复,空化数减小,空泡长度增大(0.50T~0.75T);空泡扩大过程中,来流扰动作用使流场压力再次变化,空泡尾部再次出现颈缩,部分泡体脱落,空泡长度再次减小,所以空化数再次增大。
空泡尺度的变化会对航行体的流体动力带来影响,为研究周期性来流下航行体流体动力的变化,针对工况1和工况3进行分析,即分别为航行体中部圆柱段无沾湿和有沾湿两种典型情况。

表1 不同周期性来流下的空泡形态Tab.1 Cavity shape in different periodic inflow

表2 工况4一个周期内空泡形态变化Tab.2 Cavity shape change in one period
3.3 流体动力分析
本文从阻力和升力两个角度进行分析,并且文中阻力系数CD和升力系数CL的具体表达式为
(8)
式中:Fx为x方向的阻力;Fy为y方向的升力;S为航行体中间圆柱段的截面积,S=1.257×10-3m2;ρw为流场中水的密度,取值为998.2 kg/m3。
为研究流场周期性来流作用下的航行体水动力时历变化情况,对工况1和工况3进行分析,两个周期内航行体阻力和升力系数时历曲线,如图11所示。工况1中航行体被通气超空泡完全包裹(见表1),仅有空化器前端与水接触,因此在水平方向的来流扰动下,工况1的阻力系数呈现出正弦函数形式的周期性变化,如图11(a)所示。而航行体的升力系数极小(约为10-4量级),阻力系数时历曲线基本稳定在直线状态。
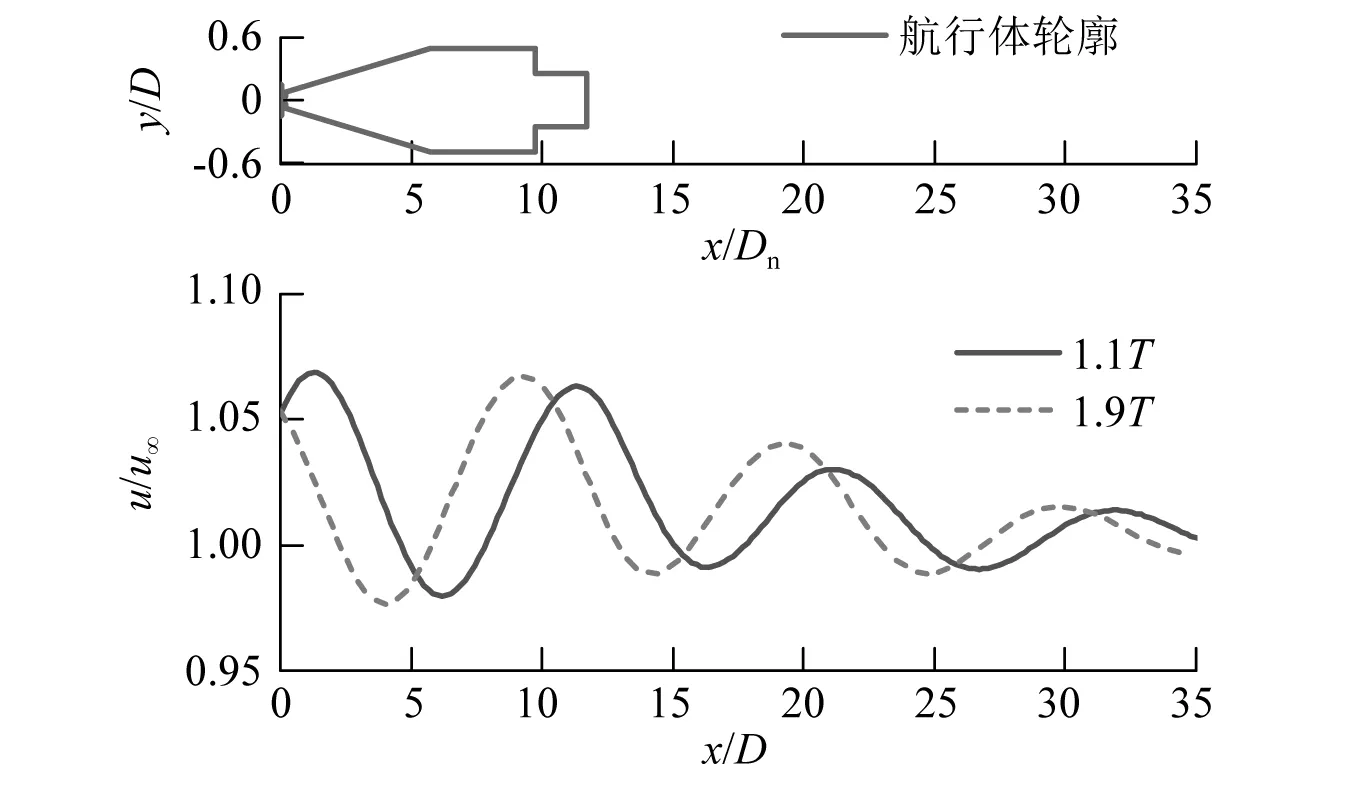
而工况3条件下航行体的流体动力变化则比较复杂,以1.0T~2.0T这个周期时间段为例进行分析。首先阻力系数总体上也有正弦周期变化的趋势,但阻力在周期初始时刻有大幅度的减小,如1.1T左右时达到最小,这是由于流场中速度分布发生了变化。给出航行体最小阻力时刻(1.1T)与最大阻力时刻(1.9T)的流场速度分布曲线,如图12所示。可见航行体圆柱段(大约5 图11 两周期内的流体动力系数变化(工况1和工况3)Fig.11 Change of hydrodynamic coefficient in two cycles(case 1 and case 3) 图12 两个时刻流场中的水平速度分布Fig.12 The horizontal velocity distribution in the flow field at two moments 航行体所受的升力主要来自于航行体上下沾湿区域的压力差,而重力环境中航行体下部的沾湿往往比上部大,升力多为正值,方向向上。从图11(b)中可以看出,在1.23T~1.50T时间段内,升力曲线从最大开始下降,如图11(b)所示。但期间存在较大波动,这是因为随着空泡形态的发展,沾湿区域不断变化并右移,航行体圆柱段侧面部分也存在沾湿(如1.25T时刻),空泡小范围的波动必引起沾湿面积波动变化,从而引起压力差值变化,带来航行体升力系数波动。1.50T~1.65T时间段的升力系数总体上比较小,1.56T时刻的沾湿区域集中在航行体圆柱段尾部,上下两部分沾湿面积相差较小,空泡的波动也极易引起上下压差化,带来升力系数波动(见图11(b))。 通过以上研究可知周期性来流扰动首先会对空泡形态产生影响,这种扰动较大会使空泡变化剧烈,航行体出现大范围的沾湿区域,严重时会大幅度降低空泡的包裹减阻效果(见表1工况6)。因沾湿区域面积直接影响航行体流体动力,所以用沾湿区域进一步分析水平方向的周期性来流对空泡的扰动影响程度。 继续对表1中工况进行分析,航行体沾湿区主要集中在后体圆柱段,对航行体沾湿面积S进行无量纲处理,对沾湿比率进行研究,无量纲的沾湿面积S1定义为 (9) 式中:S为航行体圆柱段的沾湿面积;S0为航行体圆柱段的面积。 6种工况条件的周期性来流对应的无量纲沾湿面积S1,如表3所示。 表3 不同工况下的沾湿面积Tab.3 Wetting area under different cases 根据无量纲的沾湿面积S1的取值对空泡稳定情况进行分类:当S1<1%时,认为空泡完全完整,无沾湿区域;当1% 图13 空泡形态在不同周期性来流下的分布Fig.13 Distribution of cavity shape under different periodic inflow 本文数值研究了规则的水平向周期性来流对通气超空泡形态以及航行体流体动力的影响,得到了以下结论: (1) 水翼的反向摆动可以在流场中产生水平向的周期性来流。水翼摆动频率越大,周期性来流的波长越长;水翼摆角幅值越大,来流的速度幅值越大。 (2) 周期性水平来流对空泡形态存在影响。在水平来流扰动下,通气超空泡截面出现颈缩现象,空泡长度发生周期性的变化,当周期性来流波长较短、波高较大时,超空泡航行体易产生沾湿区域,影响通气空泡包裹减阻效果。 (3) 周期性水平来流对航行体的流体动力存在影响。来流扰动作用时,若航行体被空泡完全包裹时,阻力呈正弦形式周期性变化,升力变化较小;若航行体被部分包裹存在沾湿区域时,升阻力会发生较大波动。 (4) 来流扰动的波长和波幅范围对通气空泡影响存在差异,可根据沾湿区域比例划分为:无沾湿区、有沾湿区、溃灭区,为分析来流扰动对空泡稳定性影响奠定研究基础。
3.4 空泡稳定性


4 结 论