基于CATIA的水果采摘器运动模型参数化建模方法研究
2022-05-27木海达赵锡锋陈哲权
木海达 赵锡锋 陈哲权




摘 要:采用CATIA设计并制作一种角度自调式水果采摘器。利用CAITA DMU模块,完成内剪式剪刀机构主运动剪刀的运动仿真,输出内剪式剪刀机构相互运动结合点的曲线;利用CATIA二次曲线开发功能,完成从动剪刀片的运动结合处滑动槽设计,将虚拟仿真技术与机构运动分析有效结合。通过实物验证了该采摘器机构运行平稳,为广大果农采摘树上水果提供了一种有效采摘辅助工具,具有一定推广价值。
关键词:CATIA;水果采摘器;DMU;剪刀机构;运动仿真
中图分类号:TP391.9;TH132.44 文献标志码:A 文章编号:1672-0105(2022)01-0069-03
The Parametric Modeling Method Study of Fruit Picking Motion Model Based on CATIA
MU Haida ZHAO Xifeng CHEN Zhequan
Abstract: A fruit picking device which could adjust certain angle are designed and producted with CAITA software. Based on CAITA DMU module, the motion simulation of main movement scissors which are included in the shear mechanism with inside shearing style was finished. The mutual movement curve of combining point of shear mechanism was also exported. Using the secondary curve development function of CATIA, the sliding groove design of moving junction of driven shearing blades was finished, which combined the virtual simulation technology with effective mechanism motion analysis. Through the physical verification, the picking device works steadily, which provides an effective auxiliary picking tool for orchardman when picking fruits in the tree. The fruit picking device has had a certain application value.
Key Words: CATIA; fruit picking device; DMU; scissors mechanism; motion simulation
引言
采摘机器人是未来智能农业机械化的发展方向之一,具有广阔的应用前景[1],从20世纪40年代初开始,美国、英国、法国等西方国家就已经开始研究水果采摘机械,特别是在大型农用采摘机械方面,自动化和智能化程度日益提升[2],已经在实践应用中获得了高度认可和肯定,如德国、日本、法国和荷兰等国家相继立项研究了采摘苹果、柑橘、番茄、西瓜和葡萄等智能机器人[3],但这些高端采摘机械装备造价十分昂贵,普通农户可望不可及[4]。
国内水果种植多分布于山区、丘陵地带,且种植相对零散,不利于机械化集中采摘,除了少数果园配备半机械化辅助装置,基本上停留在传统采摘方式上[5]。对于市场出现的辅助水果采摘器械,普遍存在缺点分析:(1)采摘效率不高;(2)水果直接从树上被硬拉下来,水果蒂部会被拉伤,原样的保证率不高;(3)采摘角度不可调节,无法适应水果采摘角度变换需求。
1 水果采摘器整体结构设计
針对果农使用需求,所要解决的技术关键点:(1)提供一种可修剪水果蒂的水果采摘装置;(2)可自动调节采摘角度;(3)能够采摘树枝高处水果;(4)实现水果摘下后快速存储。为此设计并制作出了一款角度自调式水果采摘器,辅助果农采摘水果,其主要结构如图1所示。
1.1 内剪式剪刀机构设计
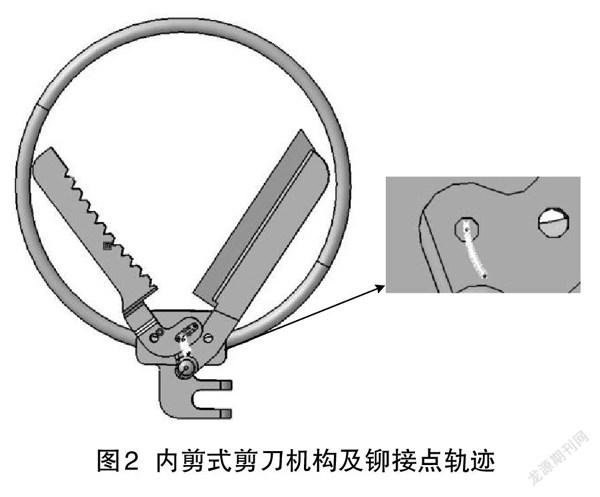
钢丝绳牵引拉动的内剪式剪刀机构如图2所示,设计步骤:(1)设计网兜框和主运动剪刀;(2)运用CATIA软件DMU生成铆接点轨迹线,如图2局部放大图所示;(3)利用CATIA二次曲线开发功能[6],将铆接点轨迹线提取并复制到左侧剪刀滑动槽二维图上,完成从动剪刀片运动结合处滑动槽的设计,如图3所示;(4)DMU仿真运行剪刀机构,调整各装配件。
1.2 角度自调式结构设计
树上采摘水果时,需要时常调整采摘角度,同时不同的果树树枝韧性有所区别,这需要采摘器具有可以调整转动力的功能,因此需要设计开发一套角度自调式结构。具体装配如图4所示。该机构由弹簧、摩擦轮组和转动轴组成。
工作原理:摩擦轮1与转动轴通过销钉连接,销钉限制在轴上槽里滑动,摩擦轮2与网兜刚性连接,转动轴与连接杆由半月槽限制转动。当螺母拧紧,摩擦轮1、2间摩擦力增大,即增加网兜转动力,反之减小网兜转动力。
1.3 柔性输送布袋
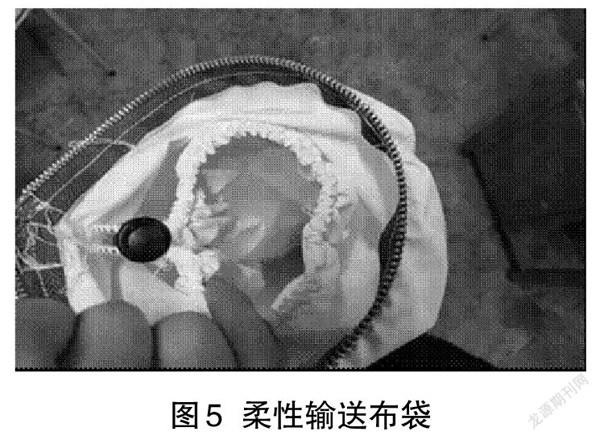
为能够快速、有效摘取树上果子,输送到果篮内,设计了一款水果柔性输送布袋。在布袋内侧加入一套锥形收缩口布袋,布袋选材具有摩擦力大、具有一定弹性的布料,布袋口上装上松紧带,使其具有调节锥形口大小的功能,能够根据水果实物大小,进行相应布袋口大小的调整;由于采摘的高度不同,伸缩杆的长度在不断变化,布袋的长度也要随时更改,因此布袋的结构实现了拆装的效果,布袋与布袋之间的连接通过拉链完成。如图5所示。
2 虚拟样机运动分析
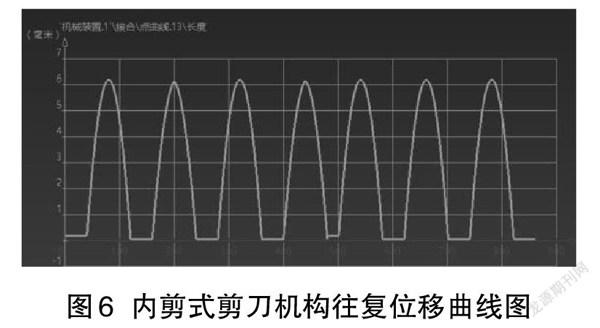
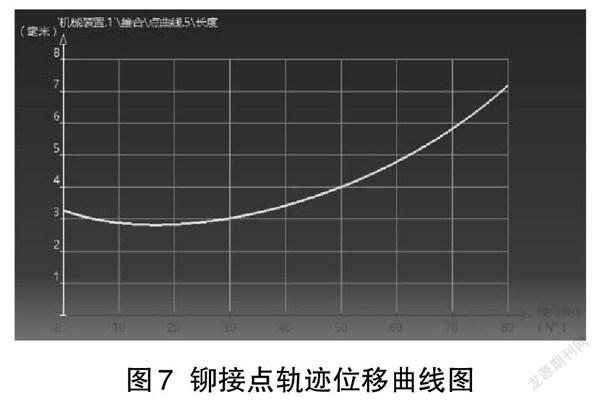
应用CATIA软件下的DMU模块,对该水果采摘器进行虚拟样机运动分析,构建之间各部件均以实物制作要求进行约束定义。通过软件检查运动干涉,输出内剪式剪刀机构和网兜支架旋转机构运动曲线图。如图6-7所示,内剪式剪刀机构位移曲线顺滑过度,位移约0~6 mm,与铆接点轨迹位移基本一致。
3 实物验证
依据虚拟样机1:1比例制作出如图8所示实物。经实地采摘验证,发现采摘如苹果、梨和柑子等大个体水果时,树枝较密处,网兜支架旋转控制有难度,内剪式剪刀剪水果蒂效果较好;对于采摘如枇杷、橘子和枣子等小个体水果时,因水果生长密集,不容易单个摘下,经常需要将小树枝一起剪下。
4 结论
(1)利用CAITA软件DMU模块、二次曲线开发、虚拟仿真和机构运动分析等功能,可以快捷、有效进行机械产品结构设计和优化;
(2)通过实物多次验证,该采摘器运行平稳,能为广大果农采摘树上水果提供一种有效采摘辅助工具,具有一定推广价值;
(3)网兜支架过大,输送布袋容易被树枝勾住,导致采摘树枝密集处水果时,容易被树枝阻挡,需要调小网兜支架,寻找不容易被树枝勾住的光滑布料作为输送布袋外部材料。
收稿日期:2021-12-05
作者简介:木海达(1988—),男,浙江温州人,本科,浙江人驰汽车配件有限公司总经理、工程师,研究方向:机械设计与制造;赵锡锋(1982—),男,浙江绍兴人,硕士,浙江工贸职业学院副教授,研究方向:机械设计;陈哲权(1993—),男,浙江温州人,硕士,浙江工贸职业技术学院助教,研究方向:机械设计。