基于UG的螺旋千斤顶模型运动仿真
2016-05-06曹宁波熊娟
曹宁波++熊娟
摘 要: 本文在对螺旋千斤顶结构部件进行建模的基础上,介绍了利用UG运动仿真模块对该机构模型进行运动仿真的分析方法和具体步骤,分析该机构在运动过程中的情况,为该机构的优化设计提供重要依据。
关键词: UG 螺旋千斤顶 运动仿真
运动分析用于建立运动机构三维模型,分析其规律。运动分析模块会自动复制主模型的装配文件,并且制订一系列不同的运动分析方案。每个运动分析方案均可独立修改,而不会影响装配模型。千斤顶是一种常用的小型起重工具,广泛应用在铁路、建筑和汽车维修等方面。在三维建模的基础上,利用UG运动仿真分析模块进行机构的运动仿真分析,能够展现机构的实际运动过程和运动轨迹,能够直观地表现机构的运动,确定设计上的合理性。UG的运动分析模块实现机构的运动仿真,为下一步做结构分析、有限元分析、强度分析及优化设计打下良好基础。本文主要以螺旋千斤顶为研究对象,利用UG/modeling模块对其各部件进行三维实体建模后,通过UG/Motion模块对螺旋千斤顶机构进行相关的运动仿真分析,最后得出运动过程。
1.UG运动仿真模块简介
UG运动仿真模块可以进行机构的干涉分析,可以跟踪零件的运动轨迹,分析机构中零部件的速度、加速度、作用力及反作用力和力矩等。运动仿真模块的分析结果可以指导修改零件的调整零件的材质或结构设计,其设计更改可以反映直接反映到装配主模型中。
2.仿真方案的创建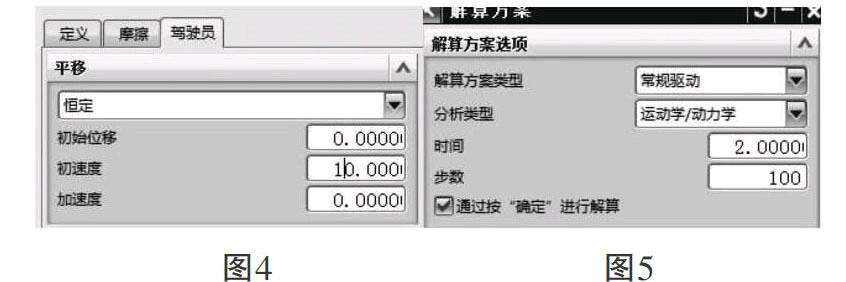
运动仿真方案的创建是进行运动仿真的关键。创建模型仿真,首先需要确定各零件部件之间的静态关系,对连杆进行运动仿真定义。根据装配模型建立一个新的仿真模型时,仿真模块会自动将装配模型中的一个个零部件(Part),映射成仿真模型中的连杆(Link),而且会选择一个连杆为接地连杆。因此,首先要定义仿真模型的连杆。
(1)创建连杆(links)L001。打开事先已经创建的螺旋千斤顶装配模型,如图1所示。单击运动工具条上的【连杆】按钮,打开连杆对话框,在视图区选择底座的中心直线为连杆,由于直线没有质量、体积,可以自定义以上中心直线的质量、体积。在连杆对话框中,单击质量和惯性标签,打开【质量和惯性】选项卡。在【质量和惯性】选项卡中,单击【质心】按钮,选择底座中心线上一点为原点。在质量,Ixx,Iyy,Izz,文本框中分别输入数值10,如图2所示,单击【应用】按钮,完成连杆L001的创建。
(2)创建连杆(links)L002。单击运动工具条上的【连杆】按钮,打开连杆对话框,在视图区选择起重螺杆,旋转杆,顶盖,螺钉,作为连杆L002,如图3,“质量属性”选项选择自动,单击确定,完成连杆L002的创建。
(3)添加运动副。运动副是要确定各零件之间的动态关系,定义运动副的运动仿真,利用装配模型建立仿真模型,仿真模块会自动将装配模中的约束运动仿真模型中。单击运动工具栏中的【运动副】按钮,选择连杆L001,在“类型”下拉列表中选择滑动副,指定原点为连杆L001上的一点,指定方向为Z轴正向。单击运动副对话框中的【驾驶员】标签,点击“平移”选项卡,在下拉列表中选择“恒定”选项,在“初速度”文本框中输入数值10,如图4所示,单击【应用】按钮,完成滑动副的创建。
单击运动工具栏中的【运动副】按钮,打开运动副对话框,类型选择“螺旋副”选项,在“选择连杆”选项,选择事先设定的连杆L002。在“指定原点”选项,选择起重螺杆中心线的一点。在“指定方位”选项,选择Z轴正方向为指定放心。单击“基本标签选项卡”里的【选择连杆】按钮,选择连杆L001,完成咬合连杆的设定。在设置选项卡里,螺纹模数比一栏输入数值-2。单击【确定】按钮,完成螺旋副的设置。
(4)定义运动驱动,完成解算方案。单击运动工具栏中的【解算方案】按钮,弹出结算方案对话框,在“结算方案类型”选项中选择“常规驱动选项”,在“分析类型”选项中,选择运动学/动力学选项,在时间文本框中输入数值2,步数文本框中输入数值100。如图5所示。在重力选项卡中,选择重力方向为竖直向下,重力常数为默认值,求解器参数数字阻尼设置为1.0,最大迭代次数设置为50,单击【应用】按钮,关闭解算方案对话框,完成解算。单击运动工具栏中的【动画】按钮,在弹出的动画对话框中,单击播放按钮,机构模型开始做仿真运动,得到不同时刻的状态,如图6。
3.结语
通过UG/Motion模块进行的运动仿真,使人们能够直观地看到运动构件的运动过程,能够解决机构的运动学问题,以实现比较精确的仿真效果,体现出了三维辅助设计的先进优势,而这些是传统二维设计不能做到的,缩短了产品的设计周期,降低了研发成本,对提高产品的品质和优化有极大帮助。按照传统的设计方法,许多分析必须等到物理样机做出来之后进行,例如干涉检查。这样不但会造成设计周期过长,而且会造成大量资金的浪费。
参考文献:
[1]杜立彬.UGNX6.0[M].电子工业出版社,2007.
[2]CAD/CAM/CAE技术联盟.UGNX8[M].清华大学出版社,2012.
[3]贾大玮.基于UG的运动支架模型运动仿真与分析[J].煤矿机械,2012,33(3):43-44.
[4]曹旺萍.基于UG的偏心机构模型运动仿真[J].信息技术教学与研究,2015.
[5]夏德伟,张俊生,陈树勇.UGNX4.0中文版机械设计典型范例教程[M].北京:电子工业出版社,2006.
[6]宋晓华,汪建平.基于UG的平面连杆机构运动仿真和分析[J].农机化研究,2005.
