托盘捆扎机构设计与ADAMS仿真
2022-05-23晏祖根孙智慧
晏祖根,李 鹏,周 彤,孙智慧,孟 爽,朱 迪
(哈尔滨商业大学 轻工学院,哈尔滨 150028)
0 引言
堆垛货物的托盘外包装可采用套袋、缠绕、捆扎等方式。采用托盘捆扎的方式,具有包装成本低、设备投入小的优点,已成为现代物流运输包装的一种重要形式。国内公司已研发系列托盘捆扎机,但与国外先进水平相比,还存在高端产品少、智能水平低、捆扎速度慢等不足[1-2]。
捆扎机构是影响托盘捆扎机性能的关键部件。为提高捆扎机构的性能,晏祖根、周彤等开展了顶捆穿箭式托盘捆扎机和捆扎机构设计及优化的研究[3-4];索利利等[5]研发了一种自动粽子捆扎夹持机构;曹巨江等[6]开展了高速取纸机构主凸轮轮廓线的设计及优化;刘飞飞等[7]采用ADAMS进行了的捆扎机锁紧机构的优化设计。国内的相关研究成果促进了我国捆扎机的技术水平与性能。
本文面向行业对高端大型托盘捆扎机的实际需求,设计多机构协同运动的托盘捆扎机构,基于捆扎机构工作循环图的设计,优化设计张紧组件的张紧凸轮,并对机构进行ADAMS动力学仿真与优化,提高捆扎机头的动态性能与捆扎速度。
1 托盘捆扎机头工作原理
顶捆穿箭式托盘捆扎机主要由托盘输送机、龙门式升降机、捆扎机头、穿箭机构和储带箱等组成,如图1所示。捆扎机按照工艺流程,自动完成托盘供送、捆扎带穿箭闭合、捆扎头下降压垛、强力熔接和切断等动作。

图1 顶捆穿箭式托盘捆扎机工作原理Fig.1 Schematic diagram of the vertical pallet strapping machine
捆扎机头是托盘捆扎机的关键部件,安装在龙门式主机的升降平台上,随升降平台自动适应垛盘的高度变化,压平垛盘,自动完成垛盘的强力捆扎。
捆扎机头的原理模型如图2所示,主要由隔离组件、左爪组件、中爪组件、右爪组件、烫头组件、张紧组件以及凸轮电机、供带电机等组成。张紧组件的张紧凸轮采用碗凸轮,其他组件采用盘面凸轮。各执行机构组件采用拉伸弹簧,使滚子与凸轮可靠接触。全部凸轮安装在分配轴上,通过凸轮电机、电磁制动器以及多凸轮连杆机构的协同控制,实现各组件的顺序节拍动作。PLC通过检测相应的光电传感器,通过带传动,实时地驱动送带电机正转或反转,驱动送带辊轮相应旋转,实现捆扎带的快速送带、收带与放带。
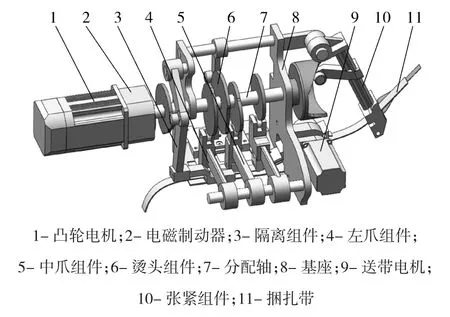
图2 捆扎机头的原理模型Fig.2 Simplified model of the strapping head
捆扎带张紧机构如图3所示。为适应托盘捆扎要求及包装箱尺寸、内包装物的不同,设计由调节臂、调节轮和弹簧等组成的张紧力调整机构。通过调节偏心轮的相位,调节张紧头卡紧捆扎带的位置,实现对捆扎带张紧程度的调节,即调整捆扎力的大小。将从动送带辊轮的中心轴做成偏心轴,调整该偏心轴的相位,可调整2个送带辊轮的中心距,以适应不同捆扎带厚度的变化。

图3 张紧组件的机构原理图Fig.3 Schematic diagram of tension assembly mechanism
按捆扎工艺要求,凸轮电机驱动分配轴及张紧凸轮旋转,张紧臂跟随摆动。此时,张紧机构上的手爪夹住捆扎带一起摆动,拉紧捆扎带。当张紧臂上的轴承移动到张紧凸轮的最高点时,张紧臂摆动角度最大,捆扎带拉得最紧。凸轮轴继续转动,在拉伸弹簧的作用下,张紧臂开始回复运动,直至回到起始位置。
捆扎机头的烫头组件与隔离组件的机构如图4所示。隔离组件将捆扎带的端部与上层捆扎带隔开一定的距离,捆扎带的端部放置在热合台上,上层捆扎带放置于隔离器中。烫头组件设计安装加热器与薄型烫头。

图4 烫头组件与隔离组件的机构原理图Fig.4 Schematic diagram of head components and isolation components
捆扎机头左爪组件、中爪组件、右爪组件的机构如图5所示。中爪组件的中爪上安装切刀,在切断捆扎带时,左爪与中爪共同夹持住捆扎带。

图5 左爪、中爪、右爪组件的机构原理图Fig.5 Schematic diagram of left claw, middle claw and right claw components
结合上述各图的机构分析,设计捆扎机构的捆扎工艺流程如下:
(1)捆扎机头回复到高位,送带机构与送带辊轮快速旋转,将捆扎带沿封闭的导带轨道快速运动,直至捆扎带的端部撞上热合台,送带辊轮停止送带运动;
(2)捆扎机头随升降台缓慢下降,同时送带辊轮慢速反向旋转,缓慢收带;
(3)当捆扎机头压平垛盘时,触发行程开关,升降台停止下降运动,右爪机构动作,将捆扎带的端部紧紧地压在热合台上;
(4)隔离器进入热合位置,将捆扎带端部与上层捆扎带分开一定的距离,同时,送带辊轮继续慢速反向旋转、收带,直至将捆扎带紧紧地贴合在托盘及包装箱的外表面;
(5)张紧机构动作,强力拉紧捆扎带;
(6)左爪机构动作,将上层捆扎带压紧在热合台的另一面;
(7)烫头机构动作,将已加热的烫头伸入2层捆扎带的缝隙中,加热捆扎带,随后烫头退出;
(8)中爪机构动作,将2层捆扎带紧紧地压合在一起,经过一段时间的冷却定型,实现塑料捆扎带的热熔接,同时,中爪上安装的切刀将已熔接的2层捆扎带切断,完成1次托盘垛的自动捆扎工艺。
2 捆扎机构工作循环图设计
捆扎机头执行机构协调运动,实现捆扎带的自动送带、烫合和切断等动作。结合机构设计与捆扎工艺流程分析,综合考虑零件加工误差、装配误差和分配转角的延时滞后等因素,通过对各执行机构运动循环图的时间同步化,设计捆扎机构的工作循环如图6所示。
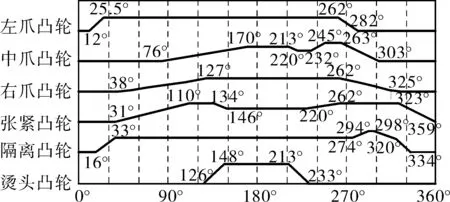
图6 捆扎机构工作循环图Fig.6 Working cycle diagram of the strapping mechanism
由于捆扎要求、垛盘高度、捆扎带材料性能的不同,使得捆扎带的送带、热熔接、冷却定型所耗费的时间也不同。根据实际工作需要,以光电传感器反馈的开关凸轮位置信号,PLC控制实时启停凸轮电机、电磁制动器和送带电机,以备有足够的时间完成送带、退带和热熔接等工艺动作。凸轮电机在1个工作循环中(分配轴旋转1周),共需停止5次,停止时间取决于实际捆扎工艺。
3 捆扎机构的凸轮设计
捆扎机构通过多凸轮连杆机构协调运动,凸轮设计是捆扎机构设计的关键环节。首先,结合捆扎机构的工作循环图,以解析法求得各凸轮的基圆半径,再利用Solidworks的ToolBox插件,建立各驱动凸轮的三维,求取捆扎机凸轮组相应凸轮的理论廓线。以张紧组件的张紧凸轮为例,根据张紧机构的运动循环图,以及捆扎机执行动作的具体要求,设计张紧凸轮,如图7所示。
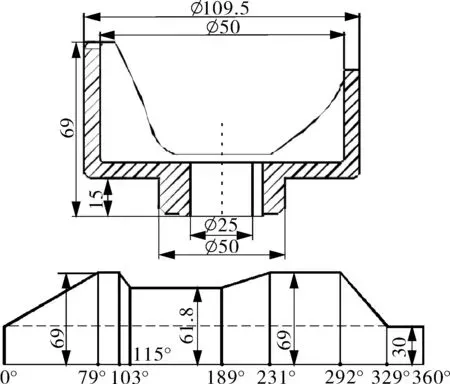
图7 张紧臂凸轮设计图Fig.7 Design drawing of tension arm cam
张紧凸轮的第1次推程h1=39 mm,第1次升程角φ01=79°,第 1次远休止角φS1=24°,第 1 次回程h2=7.2 mm,第1次回程角φh1=12°,第 1 次近休止角φS2=74°;第2次推程h3=7.2 mm,第2次升程角φ02=42°,第 2次远休止角φS3=61°,第 2 次回程h4=39 mm,第2次回程角φh2=37°,第2次近休止角φS4=31°。凸轮基圆半径为48.5 mm。
高速凸轮机构必须保证全行程范围内角位移、角速度和角加速度无突变状况,这是评价其运动规律优劣的前提。如直接采用图6所示的张紧臂凸轮运动循环图设计凸轮,在各运动阶段转换处,张紧机构必然会发生冲击现象。凸轮机构可采用等速、简谐和摆线等运动规律设计凸轮的轮廓曲线。采用5次多项式运动规律设计的凸轮,在运动过程中从动件没有冲击现象并且最大加速度相对较小,适用于高速轻载工况,是一种比较理想的运动规律[8-9]。
综合考虑捆扎机构的结构形式以及从动件质量,采用5次多项式运动规律设计捆扎机构凸轮轮廓,利用反转法原理及从动推杆规律求解凸轮的理论轮廓。仍以张紧凸轮的轮廓曲线设计为例进行说明。
张紧凸轮为空间端面凸轮,对其型线设计时要把型线展开进行计算。展开时,第1次近休弧长l1=43.2 mm,推程为0。将各参数代入5次多项式运动规律函数,求得此阶段的推程公式:S=0。
第1次推程弧长l2=76.3 mm,推程44.6 mm,推程公式:

第1次远休弧长l3=10.2 mm,推程S=44.6 mm。
第1次回程弧长l4=17.1 mm,回程8.7 mm,推程公式:
第2次近休弧长l5=80.5 mm,推程S=35.9 mm。
第2次推程弧长l6=36.3 mm,推程8.7mm,推程公式:
第2次远休弧长l7=52.3 mm,推程S=44.6 mm。
第2次回程弧长l8=28.1 mm,回程44.6 mm,推程公式:

基于上述张紧凸轮各运动阶段的推程公式,利用Matlab可求得各凸轮轮廓的型线曲线数据值。将所求得的凸轮轮廓曲线导入Solidworks,可快速建立凸轮模型及各执行机构的装配模型,完成捆扎机构设计。
4 捆扎机构ADAMS集成仿真
利用ADAMS对执行机构进行机械动力学仿真,求得机构的位移、速度、加速度的曲线及固有频率,是机构优化设计的一种重要手段[10]。首先简化捆扎机构的Solidworks模型,删除螺钉、螺母等零件,以免模型太过复杂影响仿真速度;再将机构的Solidworks模型导入ADAMS,给模型添加相应约束,在张紧臂滚轮轴承与张紧凸轮之间添加接触力,在箱体与凸轮轴上添加旋转驱动力;将仿真时长设为7 s,步数设为360步进行仿真。仿真结果如图8所示。

图8 张紧机构的ADAMS仿真结果Fig.8 ADAMS simulation results of tension mechanism
由仿真结果可以看出,张紧凸轮机构的位移运动符合5次多项式运动规律,凸轮在升程与回程阶段会产生速度和加速度的变化,但中间过程跃度没有突变;中间过程的加速度曲线幅值很小,可消除大部分的刚性冲击,机构运行更加平稳。
通过捆扎机构的ADAMS整机仿真,获取捆扎机构的前30阶模态信息。捆扎机构的前13阶模态为临界阻尼模态,不会产生机械系统的变形破坏。捆扎机构的第14~22阶固有频率如表1所示。

表1 捆扎机构的各阶固有频率Tab.1 Natural frequencies of strapping mechanism (单位:Hz)
捆扎机构的凸轮驱动电机选用YH132S-4型异步电机,额定转速为1 350 rad/min,计算得到电机的激振频率为45.33 Hz。由表1可看出,与电机激振频率最近的2阶固有频率分别为第20阶和第21阶,都远离45.33 Hz,捆扎机构不会出现共振现象。通过对捆扎机构的多次ADAMS动力学分析,优化设计机构的部分尺寸,捆扎机头运转更加平稳。
5 结语
针对企业对高性能托盘捆扎机头的需求,开展捆扎机构的设计与优化研究,建立执行机构的分析模型,设计捆扎机构工作循环图和基于5次多项式运动规律的凸轮轮廓,基于ADAMS进行捆扎执行机构的动力学分析与优化。优化的捆扎机构已在捆扎机上应用,取得良好效果。