果蝇习得性无助影响空间位置记忆*
2022-05-23杨继华胡鹏博杨郑鸿
杨继华 胡鹏博 刘 力 杨郑鸿*
(中国科学院生物物理研究所,脑与认知科学国家重点实验室,北京 100101)

黑腹果蝇(Drosophila melanogaster)是神经生物学,遗传发育学和基因学等学科的重要模式动物,在神经发育,学习与记忆,甚至精神类疾病方面都有重要研究价值。
习得性无助(learned helplessness)是用来描述动物经历过了不可逃避厌恶型刺激后产生的无助状态,并导致它们之后也无法完成可逃避的任务[1]。最早的实验中,狗被分为两组,其中一组(Master 组)经历可逃避的电击,它们可以通过踩压面前的踏板终止电击,而另一组(Yoked组)踩压面前的踏板没有任何作用,它们将经历和Master组在时间与时长上相同的电刺激——这些刺激对Yoked 组是不可逃避的。Yoked 组无法完成接下来的穿梭箱测试(shuttle box test),这是因为它们学习到自身的行为无法终止电击或使自己逃离惩罚,进而将此学习结果应用于之后的情形中。此现象被称为习得性无助。习得性无助行为在其他物种中也得到研究,如小鼠[2-3]、斑马鱼[4]、蜜蜂[5]和果蝇[6-7]。因习得性无助而改变的行为与状态有很多,包括对厌恶型刺激的躲避减少、糖水偏好降低[8-10]、快感缺失、食物摄入变化[11-12]、睡眠紊乱[13-14]、社交行为减少[15-16]、免疫系统紊乱[17]、认知能力和注意力下降[18-19]、情绪变化[20-21]等。
Heatbox 是一种研究果蝇操作式条件化的实验仪器,它根据果蝇是否运动或所处的空间位置对果蝇进行高温厌恶型刺激,以训练果蝇形成对运动或特 定 空 间 位 置 的 偏 好[22-23]。Yang 等[6]利 用Heatbox 对果蝇的习得性无助行为进行了研究。经历过不可逃避刺激的Yoked组果蝇与可以控制环境温度的Master 组果蝇相比,行为模式发生变化,如活跃度降低、爬行速度下降、逃离高温惩罚的反应时间增长。此外,使用Heatbox能够对果蝇的空间位置学习能力进行检测[23]。野生型果蝇具有很强的空间位置学习能力,经过训练可快速形成短时程记忆,在检测阶段避免进入之前被惩罚的区域。然而,对于果蝇习得性无助状态是否对其学习认知能力产生影响,目前依然未知。本文在Heatbox基础上建立了全新实验平台,既可以研究果蝇的习得性无助,也可以研究果蝇的空间位置学习能力,因此可以通过给予果蝇不可逃避刺激来建立其习得性无助状态,再检测这种无助状态对果蝇的空间位置记忆的影响。
1 材料与方法
1.1 实验装置组成与工作原理
实验装置主要由两个模块构成:
a.果蝇运动检测模块
果蝇运动平台的基础是一个半导体制冷片(40 mm×40 mm),它被厚度为2 mm的亚克力框架分隔成两个相等区域(30 mm×12.5 mm),每个区域被定义为一只果蝇的运动空间,上方的透明石英玻璃片防止它们爬出运动空间(图1)。同一个制冷片上允许两只果蝇同时单独运动。整个模块由多个果蝇运动平台组成。上方设置红外高清摄像机,同时采集多个果蝇运动平台内所有果蝇的位置信息,并传输给实验软件。全部运动平台和摄像机由长方形框架(60 cm×70 cm×80 cm,L×W×H)覆盖黑色遮光布罩住,避免外部光线和视觉信息的影响,内部由两个红外光源补光。每个半导体制冷片均连接水冷散热装置,保证热量快速被排出。
b.控制模块
控制模块包括数模转换单元、继电器开关单元、温度感应器和电源,可对系统温度进行精确控制。因半导体制冷片具有温度升降惯性,若仅简单控制流经半导体制冷片电流的方向和电源开关,虽然可以使温度最终达到目标值,但却带来因惯性而大幅超出目标温度后才能缓慢稳定的问题,这一过程可以长达十余秒,这相比果蝇的运动行为显著滞后。如果半导体制冷片的温度变化不能与果蝇行为精准匹配,将使果蝇无法把温度变化与自身行为相关联,直接影响行为实验结果可靠性。为避免以上情况的出现,本文使用了增量式PID控制算法实现对温度升降的快速精准控制,进而达到温度与果蝇行为的精准匹配效果。
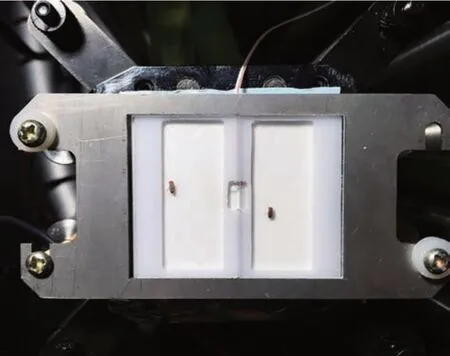
Fig.1 Two moving arenas on one Peltier element
完整实验流程如图2所示。实验过程中,位于运动平台上方的红外高清摄像机连续采集果蝇的位置信息,通过Noduls EthoVision®软件进行逻辑判断果蝇是否处于惩罚区(空间位置学习范式)或是否处于运动状态(习得性无助范式),进而决定是否对果蝇进行高温惩罚;依据是否惩罚的实际情况将升降温命令最终发送至继电器开关单元,控制输出正向电流(升温)或负向电流(降温),自行编写的温度控制软件可对这一过程进行自动、精确的控制,使半导体制冷片达到并保持在目标温度。在实验过程中,果蝇自身所处位置或运动状态由其环境温度变化而得到保持或规避,因而属于操作式条件化实验范式。
1.2 温度变化评估
为了客观、准确的评估仪器设备中温度变化的速度与稳定性,对半导体制冷片从起始温度至目标温度所用时间,以及达到目标温度后的稳定性进行测算。 使用以下公式计算稳定指数SI(stability index),指数越接近0,表示温度越稳定。
T为实际温度,Ttarget为目标温度,Ttarget+ 1 和Ttarget- 1为目标温度正负1℃之内的偏差。
1.3 空间位置学习实验范式
果蝇空间位置学习是训练果蝇将运动空间内的部分区域与厌恶型刺激偶联起来,从而在检测阶段即使没有厌恶型刺激的条件下也避免进入该区域的实验过程。首先实验软件将果蝇运动空间分为两个相等的区域(各15 mm×12. 5 mm):一个为惩罚区,另一个为非惩罚区。实验分为适应期(Pretest)、训练期(Training)和检测期(Test)3个阶段。为了使果蝇适应所处运动空间,适应期允许果蝇在25℃的半导体制冷片上自由运动30 s。在随后进行的训练期中,计算机通过对摄像头采集的果蝇位置图像进行实时处理,一旦果蝇进入惩罚区域,就控制半导体制冷片整体从25℃升温至惩罚温度,若果蝇在非惩罚区域一侧,则整体温度保持在25℃。训练期可以分为连续训练方式和间隔训练方式,在连续训练方式中为连续的5 个1 min,而在间隔训练方式中,训练过程以[1 min 训练+30 s 测试]的方式重复5 次。在第5 个测试期(5 Te)检测果蝇的行为表现指数(performance index,PI)与0是否有显著性差异。检测期果蝇运动平台的温度稳定于25℃。
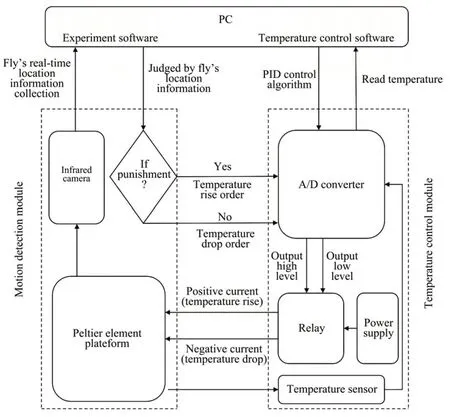
Fig.2 Process of experimental procedure
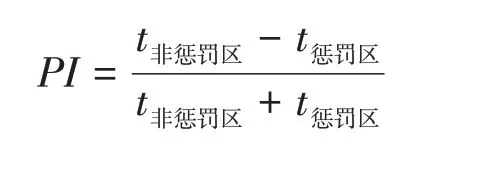
通过下列公式计算出果蝇在适应期、训练期和检测期的PI,t为果蝇在不同区域停留的时间。根据测试阶段中的PI是否显著性大于0来判断果蝇是否形成了空间位置记忆。
1.4 习得性无助行为实验范式
1.4.1 Master/Yoked 组果蝇配对习得性无助行为范式
一对Master/Yoked组的果蝇被分别置于同一个半导体制冷片上的两个运动空间内。Master组果蝇如果停止运动超过1 s,半导体制冷片将迅速升温,对该制冷片上的Master组和Yoked组的果蝇同时施于40℃高温惩罚。Master 果蝇再次开始运动时,此对果蝇所处的制冷片温度下降至25℃。Yoked组果蝇被施予了无法逃避的热惩罚,从而最终表现出习得性无助。实验分为适应期、训练期和检测期3个阶段。果蝇先在30 s 的适应期内熟悉25℃的实验环境。在训练期Yoked组的果蝇随着Master组果蝇被动接受不可逃避的热惩罚,分为短时程训练期和长时程训练期。短时程训练期的时间为一次连续的10 min;长时程训练期中一次训练时间延长至1 h,同时一只果蝇连续3 日每天9~10 点和15~16点分别接受1 h 的训练,即每只果蝇共经历6 次训练。在整个训练期间,保持Master/Yoked组果蝇的配对。热惩罚温度为40℃。果蝇习得性无助的行为检测在每次训练后的测试期完成。测试期中温度不再发生变化,稳定于25℃,时长为3 min。短时程训练期的果蝇只检测1次,而长时程训练期的果蝇一共检测6次。
通过统计和比较适应期、训练期和检测期中Master和Yoked组果蝇的活跃度和爬行速度来判断Yoked组的果蝇是否表现出习得性无助。果蝇运动速度大于等于2 mm/s 被定义为处于运动状态;活跃度是果蝇在运动状态的时间占总时间的百分比,爬行速度是指果蝇在运动状态下的每秒移动的距离。
1.4.2 随机热惩罚果蝇习得性无助行为范式
由计算机程序给予果蝇运动平台上的果蝇随机的、不可逃避的热刺激惩罚(LH 组),而对照组(Control组)果蝇不被施予热刺激惩罚。实验分为适应期、训练期和检测期3个阶段。果蝇在30 s的适应期内适应25℃的环境。训练期实验组果蝇接受50 次1~10 s 时长不等的热刺激惩罚,每两次惩罚之间的间隔为2~10 s的随机时长。热惩罚温度为40℃。
随机刺激实验流程中的检测期需要果蝇完成逃避行为。当制冷片温度自动升高时,果蝇需要穿越运动空间中线移动至空间另一侧,以使热惩罚停止,制冷片温度随之降低至25℃。10 s后下次热刺激再次开始,共重复30 次。果蝇从温度升高开始到逃离至另一侧的时间为逃离时间(escape latency)。如果一只果蝇始终没有穿过中线完成逃离任务,温度在达到目标温度40℃后保持30 s,然后自动降低至25℃,并记为一次逃离失败(escape failure)。逃离失败时的30 s不计入逃离时间。对照组果蝇没有经历随机热刺激惩罚,直接进行逃避行为检测。统计和对比两组果蝇的逃离时间与逃离失败次数判断果蝇是否表现出习得性无助。此外还可以统计比较适应期和训练后实验组与对照组果蝇的活跃度和爬行速度。
1.5 果蝇及果蝇饲养
实验用果蝇均以标准食物配方[24]饲养,培养间温度为(25±1)℃,相对湿度保持在60%,光照条件为12 h∶12 h的明暗周期。实验中所用果蝇品系包括野生型CantonS品系和突变体rut2080品系(来自德国Heisenberg教授实验室)。所有果蝇均为3~6日龄,实验中不区分性别。
1.6 统计分析方法
使用单样本t检验单组果蝇的行为指数PI与随机水平0是否有显著差异。柱状图中的误差线为均值的标准误差(SEM)。使用t检验Master 组和Yoked 组果蝇以及LH 组和control 组果蝇之间的行为差异。显著性水平如下:*P<0.05,**P<0.01,***P<0.001,n.s.P>0.05。
2 结果
2.1 新实验平台可进行空间位置学习和习得性无助行为实验
2.1.1 新实验平台可精确控制温度
在新建立的实验平台中采用了数字继电器开关、高灵敏度温控、大功率水冷系统和PID控制算法等措施。通过升降温曲线可以看出,半导体制冷片温度可以在升降温过程中快速的达到目标温度并保持稳定。从25℃升温至40℃需要(0.45±0.04)s,从40℃降温至25℃需要(0.56±0.03)s;在达到目标温度后具有较高的稳定性,目标温度40℃时,稳定指数为0.16,目标温度25℃时,稳定指数为0.23(图3)。结果显示,系统在升降温速度和维持目标温度值的稳定性两方面均达到了精准控制的效果。升降温速度和温度稳定性的提高有助于加强果蝇自身所处位置或运动状态与其所处环境温度的偶联,进而增强训练效果。
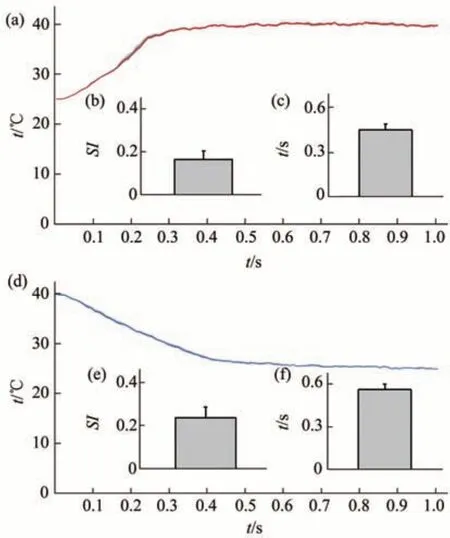
Fig.3 New control system with PID algorithm improves the temperature heating/cooling speed and its stability(a) Temperature changes in heating process. (b) Temperature arrived from 25℃to 40℃in (0.45±0.04) s. (c) SI at 40℃was 0.16. (d)Temperature changes in cooling process. (e) Temperature arrived from 40℃to 25℃in(0.56±0.03)s.(f)SI at 25℃was 0.23.n=80-89.
2.1.2 空间位置记忆能力随着惩罚温度升高而增强
在经典条件化和操作式条件化中,刺激越强烈,效果就越明显[23,25]。本文使用不同的温度作为惩罚,对果蝇进行空间位置学习的训练。每个运动空间被等分为惩罚与非惩罚两个区域,使用的4种惩罚温度分别为30℃、35℃、40℃和45℃。当果蝇在训练阶段进入惩罚区域时,温度作为厌恶型惩罚会上升到相应的数值,果蝇离开惩罚区域温度降为25℃。在训练阶段,使用35℃及更高的温度作为惩罚温度时,从第2 分钟(2 Tr)可检测到PI值与0 具有显著性差异(t检验,35℃、40℃和45℃分别P=0.0026、0.0032、0.0001),即可观察到果蝇的躲避行为(图4);而在使用30℃的惩罚温度时,只有在第4 和第5 分钟(4 Tr 和5 Tr)的PI值显著高于0(t检验,P= 0.0167 和P=0.0054),果蝇表现出对高温区域的躲避行为。使用30℃作为惩罚温度时,第2~5分钟(2 Tr-5 Tr)PI值显著低于40℃组(t检验,2 Tr中P=0.0291,3 Tr 中P=0.0194,4 Tr 中P=0.0011,5 Tr 中P=0.0041)和45℃组(t检验,2 Tr中P=0.002,3 Tr中P< 0.0001,4 Tr 中P= 0.0109,5 Tr 中P=0.0007)。40℃和45℃组的PI值在训练阶段第5分钟时也显著高于35℃组(t检验,40℃vs. 35℃P=0.0109,45℃vs.35℃P=0.0023)。在检测阶段,40℃组和45℃组的PI值显著高于0(t检验,40℃P=0.0016,45℃P=0.0021)。实验结果显示,惩罚温度35~45℃组的果蝇更快也更强烈的表现出对高温的逃避行为,而其中选择用40℃和45℃作为惩罚温度时果蝇具有更强的空间位置学习行为表现。考虑到45℃的高温可能会对果蝇造成的物理伤害,最终影响其运动能力,我们在之后实验中均采用40℃作为惩罚温度。
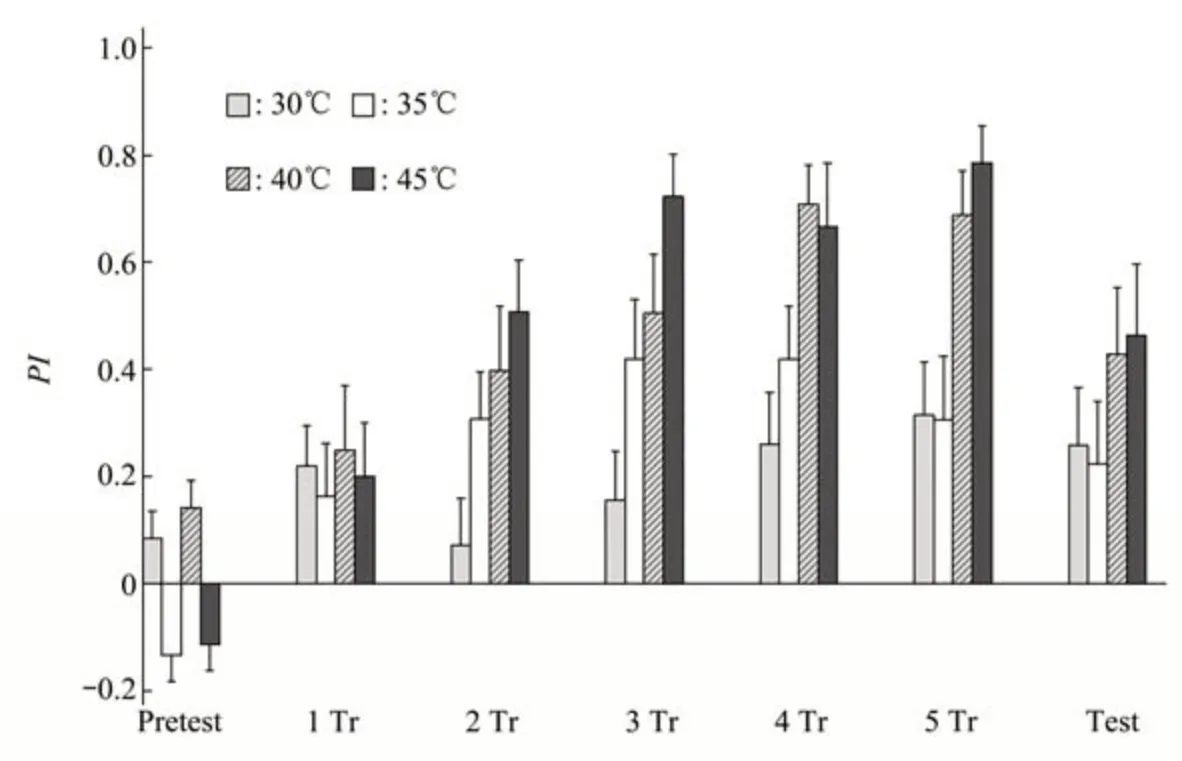
Fig.4 PI in place-learning paradigm with different punishing temperatures(n=22-30)
2.1.3 间隔性训练的空间位置学习实验范式可形成长时程记忆
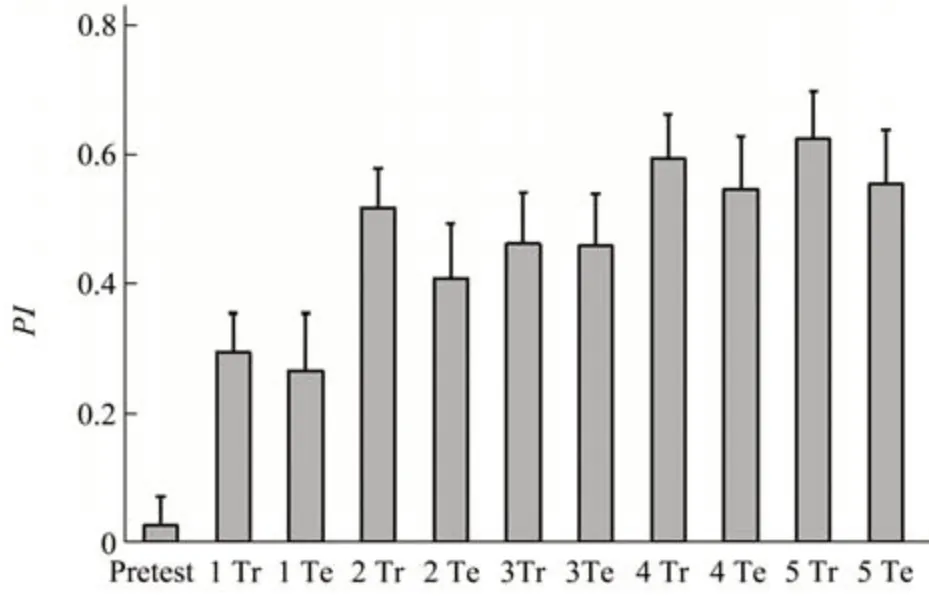
Fig.5 Flies showed robust escape behavior in training phases and high preference index in 5 Te phase(n=56)
间断性训练可以帮助动物形成长时程记忆[23,25]。空间位置学习实验范式中的间隔性训练由5 次[1 min 训练+ 30 s 测试]组成,研究这样是否能够进一步提高果蝇的空间位置记忆指数。实验结果显示,从第一次训练开始(1 Tr)果蝇的PI均显著性大于0,果蝇能够快速学习到空间位置和热惩罚的偶联关系,且在5次训练和测试循环的过程中PI值呈现上升趋势。在测试阶段PI值显著高于0(图5)。果蝇在间隔性训练流程中表现出明显的躲避行为以及在热刺激停止后表现出优秀的空间位置学习记忆。
2.1.4rutabaga突变果蝇不可完成空间位置学习
在之前的研究中,果蝇被证明可以在Heatbox中完成空间位置学习任务,快速分辨出与热惩罚偶联的区域并且避免进入该区域,从而免受高温惩罚[23]。而与学习记忆相关基因的突变体果蝇,如rutagaba品系,无法在该范式中表现出正常的学习能力[22,26]。在新的实验平台上,我们检测了野生型果蝇和rut2080突变品系果蝇的空间位置学习能力。野生型果蝇在连续5 min的训练阶段具有很强的对高温的躲避行为,PI值显著大于0(t检验,P<0.0001)。在停止高温惩罚的测试阶段,PI值依然与0 有显著性差异(t检验,P<0.0001)。这说明野生型果蝇在训练阶段,将运动区域的惩罚一侧与厌恶型刺激高温偶联,通过较少进入该范围而躲避高温惩罚。在训练之后的测试阶段它们形成了空间位置的记忆,更多的时间停留在之前不会受到惩罚的区域。而rut2080品系的PI值在训练和测试阶段均与0没有显著性差异(t检验,训练阶段P=0.0955,测试阶段P=0.1641),没有表现出空间位置学习记忆能力(图6)。
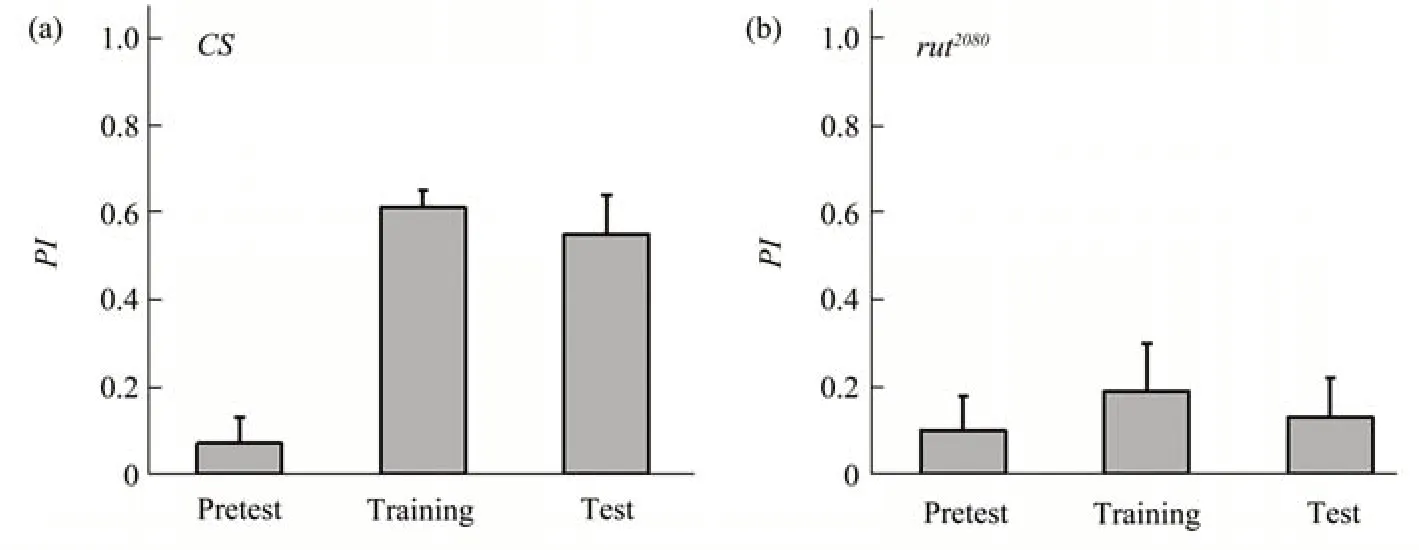
Fig.6 PI in wild type and rut2080 flies(n=21-28)(a)CS flies learned to stay on the unpunished side of moving arena after 10 min training phase.(b)rut2080 mutant flies could not learn in this paradigm.
2.1.5 果蝇表现出习得性无助状态
在新的实验平台上进行了Master/Yoked组果蝇配对习得性无助的行为实验。Master组和Yoked组的活跃度虽然在训练阶段均缓慢降低,但Master组的活跃度始终显著高于Yoked组。在测试阶段的第1分钟Master组依然显著比Yoked组更加活跃(t检验,P=0.0141),第2和第3分钟二者没有显著性差异(t检验,P= 0.19 和P= 0.4105)。Master 组果蝇的爬行速度在训练阶段比Yoked组高,其中第2、7、8、10、11 分钟二者有显著性差异(t检验,P< 0.0001,P=0.0156,P=0.0047,P=0.0028,P=0.0002)。测试阶段的第1分钟Master组的爬行速度也显著性高于Yoked 组果蝇(t检验,P=0.0005)。实验结果表明,虽然在训练阶段两组果蝇经历了同样的高温刺激,但Yoked 果蝇的活跃度、运动速度在训练阶段均低于可以控制环境温度的Master果蝇。在没有热刺激的测试阶段Yoked果蝇仍然在运动状态上与Master 果蝇有显著差异(图7)。
2.2 随机刺激实验流程可训练果蝇习得性无助行为
为简化实验流程,本文改进了习得性无助行为范式实验方法,去除Master果蝇组,仅保留Yoked果蝇组,并使用随机产生的热刺激作为惩罚,之后检测果蝇对高温的逃避行为。实验结果显示,经历过不可逃避随机热刺激的果蝇(LH),逃离时间显著高于没有经历过热刺激的对照组(t检验,P<0.001);同时,不可逃避的热惩罚也使LH 组果蝇的逃离失败次数显著增加(t检验,P<0.001)(图8a,b)。而且LH果蝇在高温惩罚和非惩罚时间内,爬行速度均显著性低于对照组(t检验,高温P=0.0035,低温P=0.0019)(图8c)。两组果蝇在适应期中的的活跃度没有显著性差异(t检验,P=0.824)(图8d)。实验结果表明,新实验流程同样可以验证果蝇习得性无助行为,而且因为更加接近已被广泛采用的训练方式,具有更高的物种间可比性。
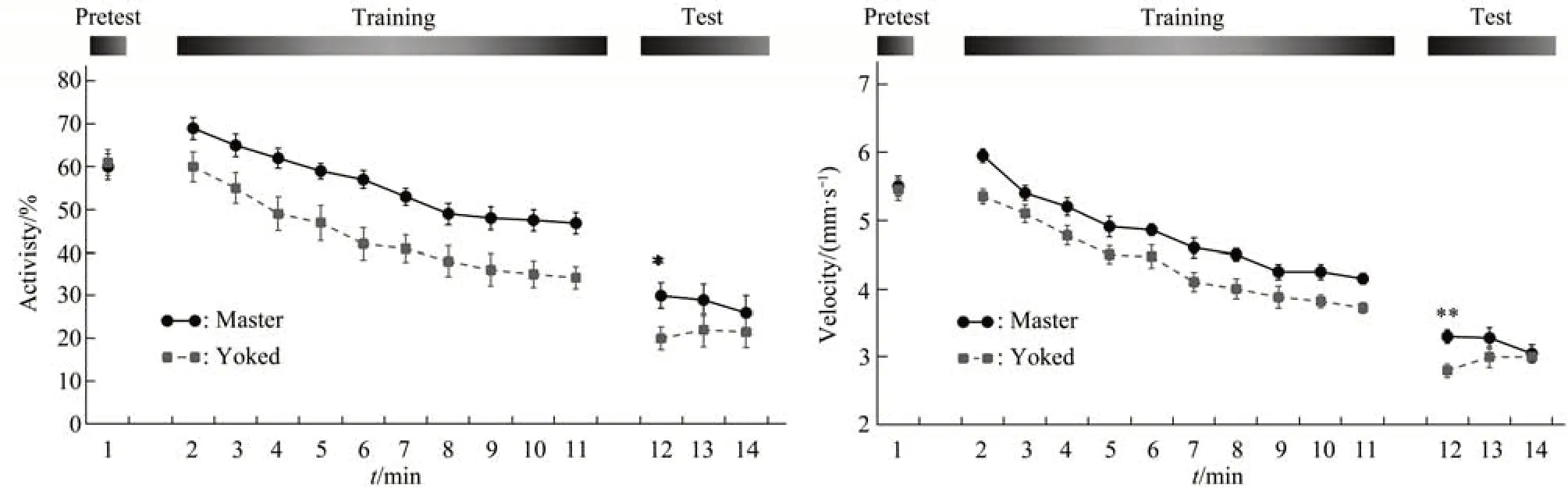
Fig.7 Master flies showed higher activity and walking speed in training phase and first test minute than yoked flies(n=109)(a) Master flies were more active in the 10 min training time than yoked flies. This difference lasted in first test minute. (b) The velocity of master flies was significantly higher than yoked flies,both in training phase and first test minute.*P<0.05;**P<0.01.
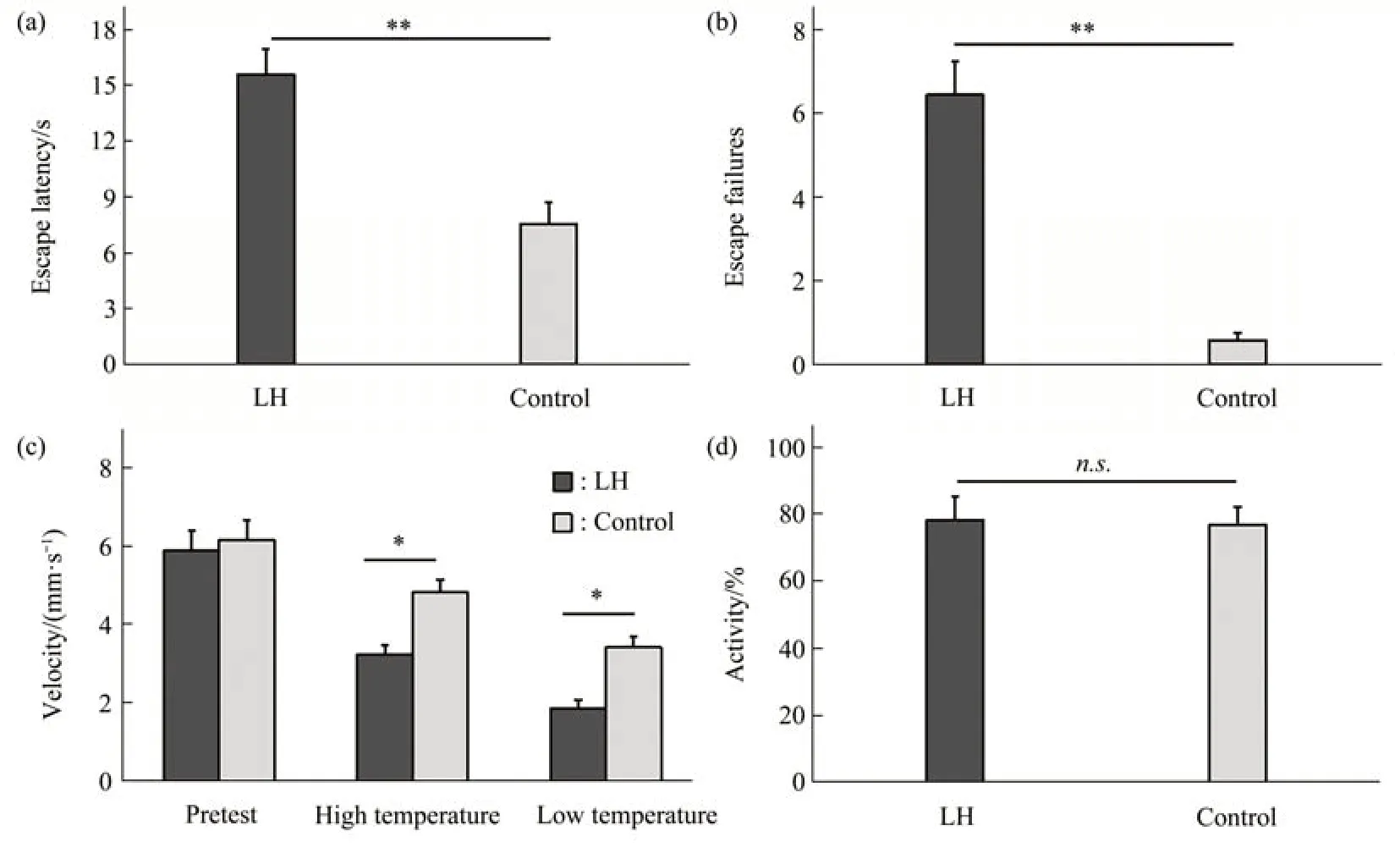
Fig.8 LH flies showed learned helplessness after random heat pulses(n=79)(a)LH flies reacted slower than control group to heat pulses and showed longer escape latency.(b)LH flies made more escape failures than control.(c)Walking speed of LH flies was lower both under high and low temperature.(d)No difference in activity in Pretest could be observed between two groups.*P<0.05;**P<0.01;n.s.P>0.05.
2.3 习得性无助行为使空间位置学习能力下降
前期的研究证明经过不可逃避高温刺激的果蝇的运动和逃离行为产生变化,为了研究习得性无助状态是否在学习等认知方面也有表现,本文对表现出习得性无助的果蝇进行了空间位置学习的检测。
首先,为了延长果蝇的习得性无助状态,使用长时程训练流程。在随机刺激试验流程中,虽然经过训练的果蝇在适应期中活跃度和对照组没有显著差别(图8d),但在空间位置学习范式训练阶段活跃度过低,不适合作为检测标准(数据未展示),所以在此使用Master/Yoked分组的空间位置学习范式。历时3 d的实验中,每只果蝇经历6次共6 h的训练,每次训练检测Master/Yoked组的果蝇活跃程度。实验结果显示,Yoked组的果蝇在每个测试阶段的活跃度与Master 组的果蝇相比均有显著降低(t检验,第1 天上午P< 0.001,第1 天下午P=0.0053;第2 天上午P=0.0437,第2 天下午P=0.0112;第3 天上午P=0.0125,第3 天下午P=0.005)(图9)。
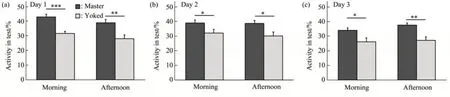
Fig.9 Master showed higher activities in test phase after 1 h training in day 1-3,respectively(n=45-47)(a-c)In long term training protocol,flies were trained in morning and afternoon for 3 d,1 h for each training session.Master flies were more active in the test phase after 1 h training phase in all 3 d.*P<0.05;**P<0.01;***P<0.001.
长时程习得性无助训练之后进行空间位置记忆检测。在空间位置训练中,之前的Master与Yoked组的果蝇均可以通过避免进入与高温偶联的惩罚区域而免于高温惩罚,在间隔性训练之后测试其PI。结果显示,在空间位置学习范式中,虽然两组果蝇都能较好的训练中躲避热惩罚区域,但之前经历过随机的、不可逃避的热惩罚的Yoked 组果蝇,在5次训练之后的测试阶段(5 Te)记忆指数显著低于Master组果蝇的记忆指数(t检验,5 TeP=0.0011)(图10a)。而两组果蝇在训练和测试阶段的活跃度并没有显著性差异(图10b)。
3 讨论与展望
随着习得性无助行为模型在不同物种中的建立,该行为范式已逐渐发展为最重要的人类抑郁症动物模型之一,并得到越来越深入的研究。本研究首先建立了新的实验平台,能够精准控制温度并高效对果蝇进行行为测试。其次,使用新实验平台和新实验流程,能检测到果蝇的空间位置记忆和习得性无助状态。最后发现,经过长时程不可逃避刺激训练的果蝇,能够检测到活动性降低等习得性无助表现,随后的空间位置记忆实验检测中,果蝇空间位置记忆能力下降。
3.1 建立新实验平台
在新实验平台中使用40 mm×40 mm 的半导体制冷片,使单只果蝇的运动空间达到30 mm×12.5 mm,面积约为Heatbox 中运动范围的3.2 倍。果蝇可在此空间内的运动更接近其自然爬行状态。运动空间上方配备的红外摄像机,保证实验过程中可观察每一只果蝇的运动状态,如出现果蝇在实验中死亡等特殊情况可根据需要排除特定果蝇或者终止实验。同时,完整实验过程可被全程录像记录,用于实验后再次对数据进行处理或者确认实验过程等。习得性无助实验中,同一个半导体制冷片上的两个运动空间分别放置一对Master组和Yoked组的果蝇,可达到两只果蝇经历升降温事件的高度一致的效果,避免因不同半导体制冷片而产生的系统性误差。数字继电器、高精度温度传感器、水冷等部件使温度得到精准控制,配合PID算法温控软件和Noduls EthoVision®实验软件,半导体制冷片可以根据果蝇自身运动快速升降温,在0.6 s 之内达到并稳定在25℃或40℃的目标温度。
本文使用新平台重复了野生型和突变体果蝇的空间位置学习实验和习得性无助行为实验。此外,新平台不仅能使用间隔性训练流程对果蝇的空间位置学习进行测试,还能使用长时程不可逃避刺激训练流程,检测果蝇习得性无助行为对其运动能力和学习认知能力方面的影响。
3.2 果蝇学习认知能力受习得性无助状态影响
本文使用新的实验平台对果蝇空间位置学习进行了研究,并且使用间隔训练方式使果蝇更易形成长时程记忆。在习得性无助范式中,检测到果蝇经过3 d长时程不可逃避热刺激后,其空间位置学习能力降低。其原因首先是重复的训练过程加强果蝇的学习效果,将高温与不可逃避刺激进行更强烈的偶联,使果蝇面对之后的可逃避的高温刺激时有更高的概率放弃逃跑,表现出无助状态。另一个原因可能是经历连续3 d的训练后,相关神经元内产生新的蛋白质,使果蝇行为模式发生改变。在长时程习得性无助训练中,依然使用Master/Yoked 组合,而非随机刺激的实验流程。这是因为经过长时程随机刺激后,果蝇的活跃度显著下降,在之后的空间位置学习范式中,它们会在非惩罚区域保持长时间的静止,而无法在训练阶段得到足够的热刺激,所以随机刺激流程并不适合此范式。但随机刺激流程因更加简洁方便,并且和小鼠等动物的实验操作更相似,依然是有效的习得性无助实验范式。
3.3 展望
习得性无助行为在1967 年利用狗作为动物模型被发现后,随后在包括小鼠、果蝇等多种动物中都建立了研究该行为的实验范式[2,6-7]。因为习得性无助动物模型中的许多行为表现与人类抑郁症症状有相似之处,且基于单胺假说的多种抗抑郁药物被证明对习得性无助范式模型中的动物行为有改善效果,所以习得性无助成为广泛应用的抑郁症动物模型和抑郁症药物筛选模型之一[27-28]。5-羟色胺[29-31],多巴胺[32-33]还有去甲肾上腺素[34]都对小鼠的习得性无助行为有显著影响。不可逃避的刺激也会引起动物脑神经回路广泛的变化,包括下丘脑、腹侧被盖、伏隔核、海马、杏仁核、新皮质以及中缝背核、蓝斑和缰核等[35-36]。在果蝇中的研究发现,蕈形体在习得性无助行为中起到重要作用[37]。激 活 蕈 形 体α 和β 叶 中5-羟 色 胺 受 体5-HT1A或γ叶中5-HT1B受体神经元可以分别阻止或加重果蝇的习得性无助行为表现。然而,对抑郁症和习得性无助行为动物模型的理解和认知依然有限,也缺乏对重度抑郁障碍的有效治疗方法。相信随着果蝇习得性无助行为新平台的建立,结合果蝇神经系统相对简单、便于转基因操作等特点,通过对相关神经元的阻断和挽回实验,可以快速完成对不同神经递质的突变体(包括神经递质合成酶、转运酶和递质受体等突变体)的筛选工作;再通过对果蝇不同脑区的神经阻断,研究具体神经递质在果蝇脑中起作用的位置。这将对进一步加深对抑郁症发病机制的理解和治疗方法的探求起到重要推进作用。
对果蝇的空间位置学习能力的研究较为深入。有研究提示果蝇的腹神经节、中间束和嗅球可能在空间位置学习中起到重要作用[26]。同时,5-羟色胺和多巴胺能影响果蝇的空间位置学习能力,章胺等神经递质则不参与其中[38-39]。然而,神经递质是如何在此过程中发挥作用,怎么影响果蝇的空间学习和记忆却仍然不清楚。利用新建立的果蝇空间位置学习范式,可以首先对不同脑区神经元进行阻断,验证并确定在果蝇空间位置学习中真正起重要作用的神经元,然后再继续筛选各种神经递质在此范式中的影响,最后找到参与空间位置学习的神经递质,在相关神经元中分别进行阻断和挽回实验,寻找作用位点进而确定果蝇空间位置学习的神经环路作用机制。
4 结论
本研究通过建立高效稳定的温度惩罚实验平台,首先对果蝇的空间位置学习能力进行了检测。研究发现不同温度下,果蝇空间位置学习能力不同。随着温度的升高,它们可以更快更久的找到并停留在正常温度区域内。而学习记忆突变体,如rutabaga,是无法完成这一学习过程的。随后在习得性无助行为检测中,利用Master/Yoked配对范式以及电脑给予随机刺激范式,均可测得果蝇表现出习得性无助状态。最后,研究发现在接受长时程的不可逃避热刺激后,果蝇的空间位置学习能力受到影响。本研究可进一步加深对习得性无助行为和其影响的理解,进而对了解和治疗抑郁症起到一定推进作用。
致谢感谢刘继勇博士和焦仁杰教授提供用于本文摘要配图和刊物封面设计的果蝇照片。