双臂SCARA机器人运动学分析与仿真*
2022-05-20郝建豹蔡文贤
郝建豹,蔡文贤
(广东交通职业技术学院 工业机器人系,广东 广州 510800)
0 引 言
装备制造企业工艺板、电路板等快速插件领域应用通用机器人(如常见串联6自由度机器人,平面SCARA 4自由度机器人)无法发挥其高度柔性化的优势,且存在灵活度低、工作效率低、性价比低等问题[1-5]。而双臂机器人是一个控制系统控制两个独立臂部的机器人,双臂可以协同作业,或单臂独立作业,或同时做两种不同工作,在生产效率等方面比通用机器人都有很大的提高。
常见串联6自由度机器人的相关研究理论并不是全部都适用于双臂机器人研究,双臂机器人研究是研究领域中较为关键的新研究课题,具有较高的社会价值[6-7]。ABB机器人公司设计的7自由度双臂YUMI机器人几乎具备了人类手臂的全部操作功能,但是其价格昂贵,应用到某些插件领域性价比较低。
机器人运动学分析是实现机器人运动控制的基础[8],而 D-H法[9-12]是常用的分析方法。笔者针对快速插件领域设计了双臂SCARA机器人,该机器人一共5个自由度,单臂2个自由度,机器人移动轨道1个自由度。笔者设计并制作了虚拟样机,利用D-H法建立了运动学模型,并对机器人工具坐标、工件坐标及世界坐标进行了标定,针对双臂协同工作情况利用SimMechines进行了运动仿真。
1 机构简述及模型建立
双臂SCARA机器人的本体机械结构主要包括直线运动模块,基座、手臂(大臂与小臂)、末端执行器等部分,具体如图1所示。
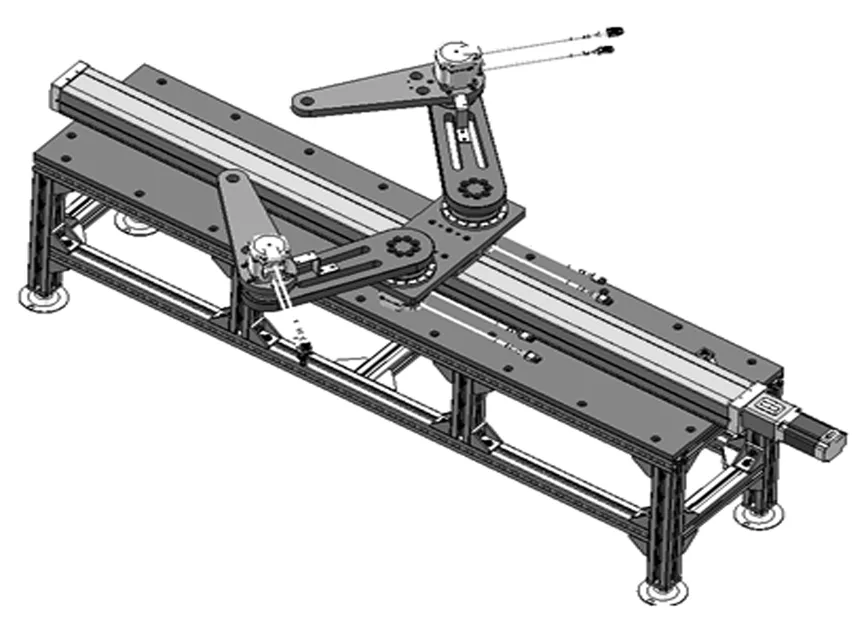
图1 双臂SCARA机器人虚拟样机
机器人直线运动模块完成机器人的直线运动,可扩大机器人运动范围。大臂与小臂两个旋转运动,两个旋转关节的轴线相互平行,可控制末端执行器的姿态及其在平面方向上的运动定位。末端执行器采用气动方式,可执行垂直插件运动。
1.1 机器人正运动学方程
由于双臂 SCARA 机器人单臂具有2个自由度,而机器人移动轨道1个自由度为伺服电机独立控制,对双臂机器人研究没有影响,另外机器人手部垂直运动自由度可忽略,故可将其简化为俯视图如图2所示的结构。

图2 双臂SCARA机器人坐标系
图2中双臂 SCARA机器人坐标系为世界坐标系,符合右手定则,Z轴垂直纸面向下。SCARA1为右臂,SCARA2为左臂。α1是左大臂长度,α2是左小臂长度,α3是右大臂长度,α4是右小臂长度。其他说明及取值见表1。

表1 双臂SCARA机器人D-H坐标参数
因双臂机器人左右臂对称,对双臂机器人单手系D-H坐标转换公式:
An+1=Rot(z,θn+1)×Tran(0,0,dn+1)×
Tran(an+1,0,0)×Rot(x,an+1)
(1)
式中:cn+1表示cosθn+1,sn+1表示sinθn+1,cαn+1表示cosαn+1等,下同。
根据公式(1)可得出:
双臂SCARA机器人的轴1与轴2之间的变换规则为:
RTH=RT11T22T3…n-1Tn=A1A2A3…An
(2)
根据式(2),得出机器人正运动学模型:

(3)
式中:c12表示cos(θ1+θ2);s12表示sin(θ1+θ2)。
1.2 机器人逆运动学方程
由于双臂机器人有两个摆臂,到达空间一点有两组合适解,一个属于右手系,一个属于左手系,因此逆运动学求解时需要根据左右手系给出唯一解,可根据关节当前角度所构成左右手系统进行判断。为求解逆运动学,对于双臂机器人中的某一臂,采用几何方法,具体如图3所示。

图3 逆运动几何图形
在ΔOAB中,由余弦定理得:

结合右臂臂长数值α3与α4,下面根据象限可解出右臂θ3,θ4的值。
(1)如果px>0,左手系情况下:
右手系情况下:
(2)如果px<0,py<0,左手系情况下:
右手系情况下:
(3)如果px<0,py>0,左手系情况下:
右手系情况下:
2 双臂SCARA机器人关键数据标定
2.1 工具坐标系标定
由于机器人末端执行器实际加工尺寸与理论设计尺寸存在偏差,另外末端执行器在安装过程中存在偏差,因此需要对安装后的末端操作器实际尺寸进行反向测量,进而需要对工具坐标系标定。

两式相减:
从而得出:
2.2 世界坐标系标定

(6)

3 双臂协同运动仿真
为验证文中所建立的正、逆运动学模型的准确性,基于Matlab工具 SimMechines 虚拟样机运动学算法仿真验证。利用SolidWorks软件对双臂机器人进行建模后,转换为STL(stereo lithography)文件类型并导入 Matlab 软件中,编写程序函数 T=SCARA_fkine(theta),T=SCARA_ikine(Tcp,DH)等,在SimMechines中装配并添加关节约束,并给定双臂SCARA机器人的起始点。仿真给定双臂SCARA机器人起点和终点的相关数据如表2所列。仿真结果如图4所示。
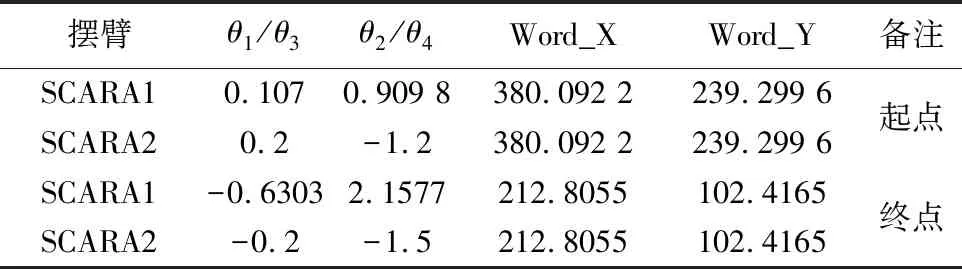
表2 双臂SCARA机器人运动学仿真数据验证
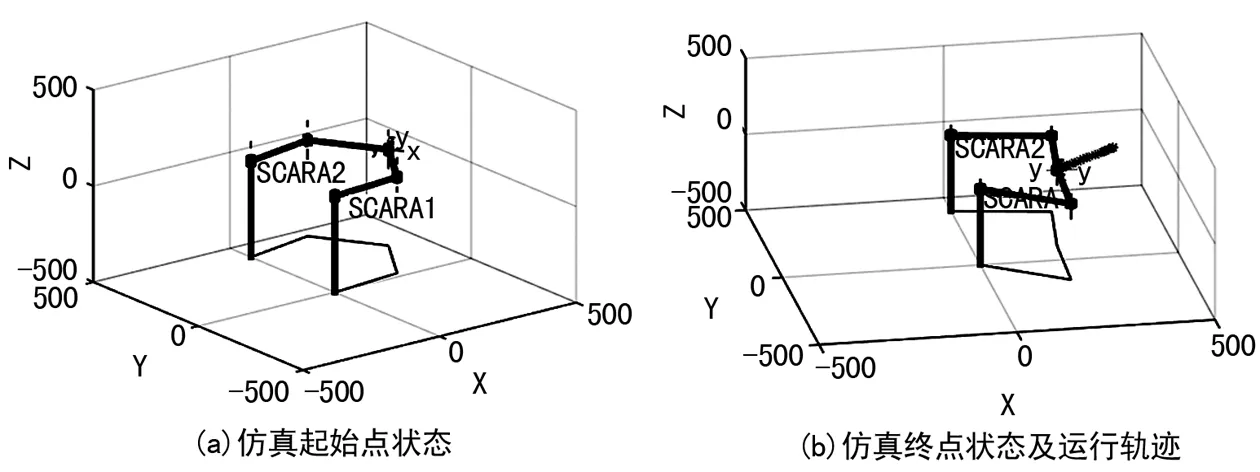
图4 机器人左右手臂协同运行轨迹
双臂协同直线轨迹仿真说明,所建立的正逆运动学模型正确的,并且能够完成协同运动。
4 结 语
设计了一种5自由度的双臂SCARA机器人虚拟样机,应用D-H坐标系建立了正逆运动学模型。针对双臂机器人给出了工具坐标系、工件坐标系、世界坐标系标定方法。采用基于Matlab工具 SimMechines 虚拟样机进行了双臂协同运动仿真,仿真结果验证了构建模型的正确性,为进一步研究双臂机器人的开发与工程应用提供了参考。