Numerical Modeling of a New Flight Simulator Enabling Continuous 360-Degree Spinning and Translational Motion
2022-05-20YuefaZhouTaoLiZailinBiWenboZhouQunkaiChenandZhiyongZhang
Yuefa Zhou, Tao Li, Zailin Bi, Wenbo Zhou, Qunkai Chen and Zhiyong Zhang
(1. College of Aerospace and Civil Engineering, Harbin Engineering University, 150001 Harbin, China;2. UCL Cardiovascular Engineering Laboratory, University College London, London WC1E 6BT, United Kingdom)
Abstract: This paper presents a new nine-degree-of-freedom parallel mechanism, which can be applied as a flight simulator. The mechanism is composed by Stewart turntable and another three-axis turntable. The Stewart platform can realize six-degree-of-freedom movement in space, but the working space is limited. After the three-axis turntable is installed, the rotation space can be increased to simulate more realistic flight conditions. This paper analyzes the new flight simulator from kinematics and dynamics aspects. In addition, the flight simulator is simulated and analyzed based on the MATLAB/Simulink simulation system. The results obtained from the numerical simulations is planned to be used for the practical manufacturing and applications of the new platform.
Keywords: three-axis turntable; multi-degree of freedom; flight simulator; Newton-Euler equation; numerical simulation
0 Introduction
Since 1965, a Stewart platform with six degrees of freedom movement was developed by German scholar Stewart[1]. The motion simulator based on this platform structure has entered an era. Compared with serial mechanisms, such as mechanical arm, Stewart platforms have the feature of high rigidity, high precision, relatively small inertia, stable structure, and strong bearing capacity[2]. Thus, Stewart platforms get a high concern and attention since they are in use of practical applications, such as NASA vertical motion simulator[3], stabilized platform[4], spacecraft Omni-directional rendezvous[5], flight simulator[6], and Five-hundred-meter Aperture Spherical radio Telescope[7-8].
However, Stewart platforms can be titled as ±20~30 degrees in its workspace because of the character of parallel platform[9]. Most current flight simulators have applied Stewart platform as motion base. Jiang[10]used the Stewart platform with six degrees of freedom to analyze the kinematics of the general aviation simulator. Zhang[11]explored the overall coupling simulation effect of the improved algorithm on Stewart platform, and PID control and SimMechanics model were introduced for joint simulation. Du[12]designed a 6-DOF flight attitude simulation platform based on Stewart 6-DOF parallel mechanism inverse kinematics control algorithm, which transformed the flight attitude data into the motion control parameters of actuator. In order to enlarge rotation angle of flight simulator, much efforts have been conducted, for instance, a flight simulator contains horizontal and vertical thrusts in addition to a full 360 degrees invented by McClintic[13]. A new mechanism Eclipse-II designed by Jongwon allows continuous 360 degrees rotation inA,B, andC-axis as well asX,Y, andZ-axis translational motions[14]. The 4PUS-PPPS was proposed in order to improve the rotation angle of motion simulator[15]. Among these mechanisms, McClintic’s flight simulator only has five freedoms in its workspace, and Eclipse-II is a complex mechanism for controlling. 4PUS-PPPS enlarges the rotation angle, but it cannot achieve 360 degrees of overturn.
In this paper, a new type of flight simulator is proposed through the combination of a three-axis turntable and a Stewart platform[16], and the working cabin is located on the inner ring.
Compared with the traditional flight simulator, this simulator not only has the structural advantages of the Stewart platform, but also can realize the 360-degree rotation of the working cabin through the successive rotation of the three rings.
1 Introduction of the Model
1.1 Model of the Motion Simulator
The model of the new flight simulator is shown in Fig.1.

Fig. 1 Model of the new flight simulator
As shown in the Fig. 2 and Fig. 3, the upper body of the flight simulator is expressed asAand the lower part of the flight simulator is expressed asB.Three axis turntables are represented asAi(i=1, 2, 3), which also represents the outer-loop, the middle-loop, and the inner-loop connected by revolute joints, and its axis is perpendicular to each other.
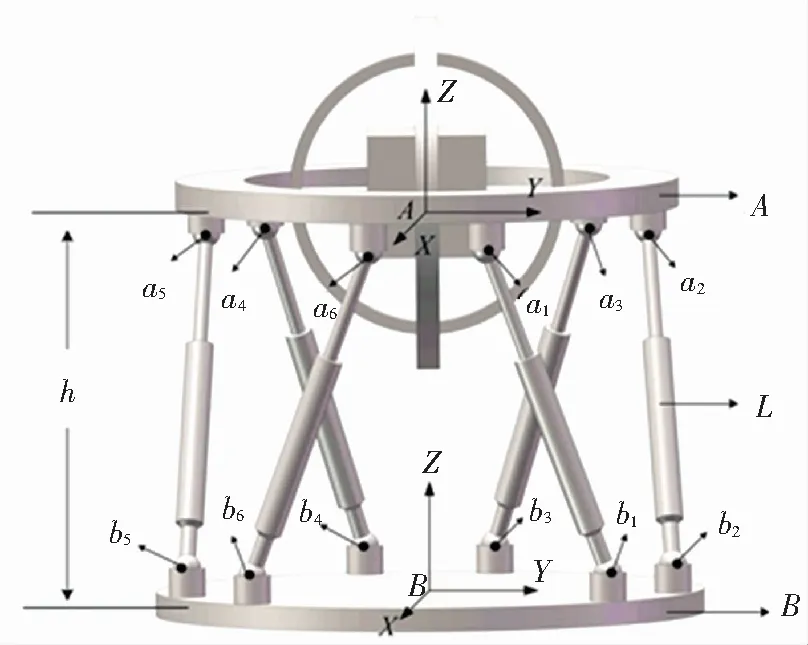
Fig. 2 Coordinate system diagram of flight simulator
The coordinate systems are established, as shown in Fig. 3. Fixed with reference systemB-XYZ, the original pointBis located on the mass center of the base-platform. The original pointAof systemA-XYZis located on mass center in the up-platform. Reference systemAi-XiYiZi(i=1, 2, 3) connects with the outer-loop, the middle-loop, and the inner-loop (working cabin) of the three-axis turntable, respectively.

Fig. 3 Three-axis turntable diagram of flight simulator
1.2 Motion Parameter Setting
The upper-platform makes the general motion which comprises translational and rotational motions in the fixed reference systemB-XYZ.The generalized coordinatesq1,q2,q3represent translation of the mass centerAalongBX,BY,BZaxes in the position of the static coordinate systemB-XYZ, and generalized coordinatesq4,q5,q6denote the turning angle of upper-platformAaround its body axisX,Y,Z, respectively. The rotation angle of each ring rotates around its body axisq7,q8,q9, respectively. At the initial moment,q7=0,q8=0,q9=0.
2 Kinematic Analysis of Motion Simulator
2.1 Location Analysis
Location analysis is the most basic of kinematic analysis. The flight simulator is simplified as shown in Fig. 4. The long side length of the upper platform structure isn1, the short side length ism1, and the vertical distance between the upper platform and the lower platform ish.

Fig. 4 Simplified structure diagram
Similarly, suppose the length of the long side of the base platform isn2, the length of the short side ism2.
Then the initial position coordinate matrix of each hinge point in the coordinate systemB-XYZis as follows:
(1)
(2)
Then, the body coordinates of each hinge point on the platform can be converted to a fixed coordinate system through the coordinate transformation matrix.
[A1]=[T3][T4][T5][A]
(3)
[B1]=[B]
(4)
The above matrices [A1] and [B1] are the coordinate matrices of the platform hinge points in theBsystem after the direction cosine matrix transformation. [T3], [T4], [T5] matrix is the direction cosine matrix of the upper platform rotating around theAX,AY,AZaxis.
(5)
(6)
(7)
Therefore, the length of the real-time change of the driving branch is
(8)
In Eq.(8),aijandbijare the elements in thei-th column andj-th row of matrix [A1] and [B1], respectively.
2.2 Kinematics Analysis on Up Platform
In the fixed coordinate system, the velocity of the center of mass of the upper-platformAis
(9)
(10)

(11)
(12)
From the derivation of the above Eq.(12) with respect to time, the angular acceleration of the origin is obtained.
(13)
2.3 Kinematics Analysis of Three-Axis Turntable
As shown in Fig. 5, it is the rotation form of the three-axis turntable.
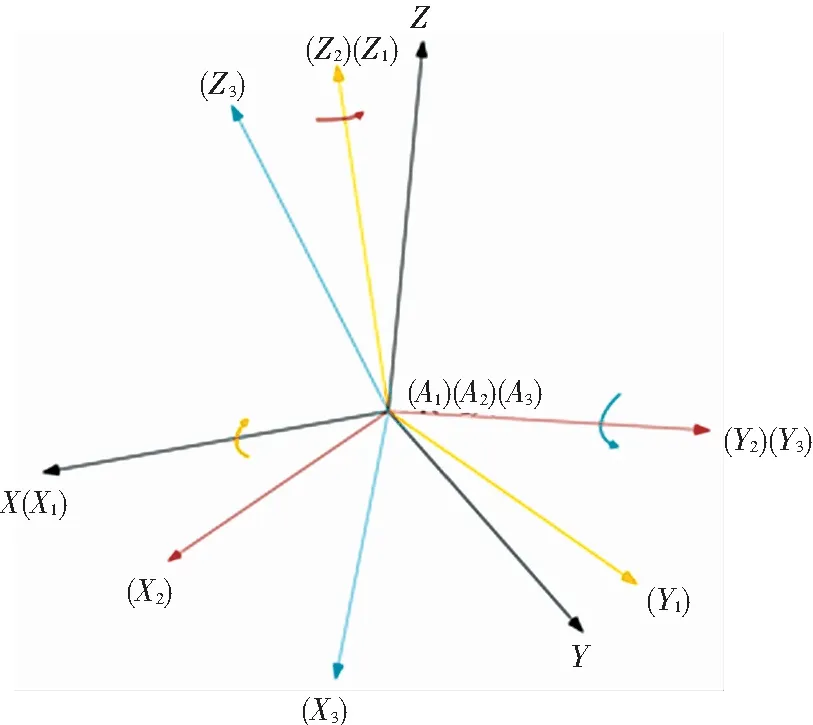
Fig. 5 The rotation form of the three-axis turntable
The outer-loop, the middle-loop, and the inner-loop of the three-axis turntable make the fixed-point rotation around the mass center relative to upper-platformB.Three rigid body rotation angular velocity array at a fixed conference systemB-XYZcan be expressed.
Angular velocity of the outer-loop is
(14)
Angular velocity of the middle-loop is
(15)
Angular velocity of theinner-loop is
(16)
where[L7], [L8], [L9] represent the direction of cosine matrix, which produces through the three-axis turntable rotation around the mass center of the upper-platform.
(17)
(18)
(19)
Change ofω1,ω2,ω3with respect to time can be obtained corresponding angular acceleration array which is represented byα1,α2,α3.
It is worth mentioning that the three-axis turntable is mainly used to simulate the complex rotation of the aircraft in the air. This kind of rotation is not stable and has low-speed rotation, so it will not produce gyro effect.
3 Dynamic Analysis of the Simulator
This article uses Newton-Euler method to model the dynamics of the flight simulator.
As shown in Fig. 6, the gravityGA,GAiof up platform, three-axis turntable, and driving forceFiby six drive rods are taken into consideration.F′andM′are the inertial force and moment of inertia of the system, respectively.riis the position vector from the hinge point to the originA.With all the force to the mass centerAsimplified, the main vector, and the main moment can be obtained.

Fig. 6 The force analysis
Suppose the unit vector matrix of the driving force of the 6 driving branches isS.
(20)
Then the main vector of the platform can be written as fellows:
(21)
According to the Newton-Euler method, the inertia force of the platform is
(22)
The main moment can be obtained as
(23)
According to the Newton-Euler method, the moment of inertia of the platform is
M′=Jε+ω×(Jω)
(24)
In the above formula,Jis the inertia tensor.
From Eqs.(21), (22), (23), and (24), the driving forcesF1toF6and driving momentsM1,M2,M3can be obtained as follows:
(25)
Similarly, the dynamic analysis of the three-axis turntable is easy to get through the Newton-Euler equation:
Jiαi+ωi×Jiωi=[L4]T[L5]T[L6]T...
[Li+6]T[Mi] (i=0,1,2,3)
(26)
whereJiis the inertia tensor of each rotating ring of the three-axis turntable.Miis the rotational torque
Mi=([L4]T[L5]T[L6]T...[Li+6]T)-1Jiαi+
ωi×Jiωi(i=0,1,2,3)
(27)
4 MATLAB/Simulink Simulation Verification
Simulink is one of the most famous dynamic system simulation platforms in the world. In this study, simulation analysis of flight simulator is based on Simscape module in Simulink. Table 1 shows parameters of the flight simulator.
Now, consider the complex trajectory of working cabin.
Set the motion equation of the flight simulator asq1=80sin(πt/25)mm,q2=40sin(πt/25)mm,q3=60sin(πt/25)mm,q4=0.1sin(πt/25)rad/s,q5=0.2sin(πt/25)rad/s,q6=0sin(πt/25)rad/s,q7=0.5sin(πt/2)rad/s,q8=0.5sin(πt/2) rad/s, andq9=0.3sin(πt/2) rad/s. Then the simulation animation is shown in Fig. 7, the driving force of the driving branch is shown in Fig. 8, and the driving torque of the three-axis turntable is shown in Fig. 9.
From Fig. 7, you can see the motion form of the flight simulator, which has the characteristics of multiple degrees of freedom, large displacement, and 360-degree rotating space.
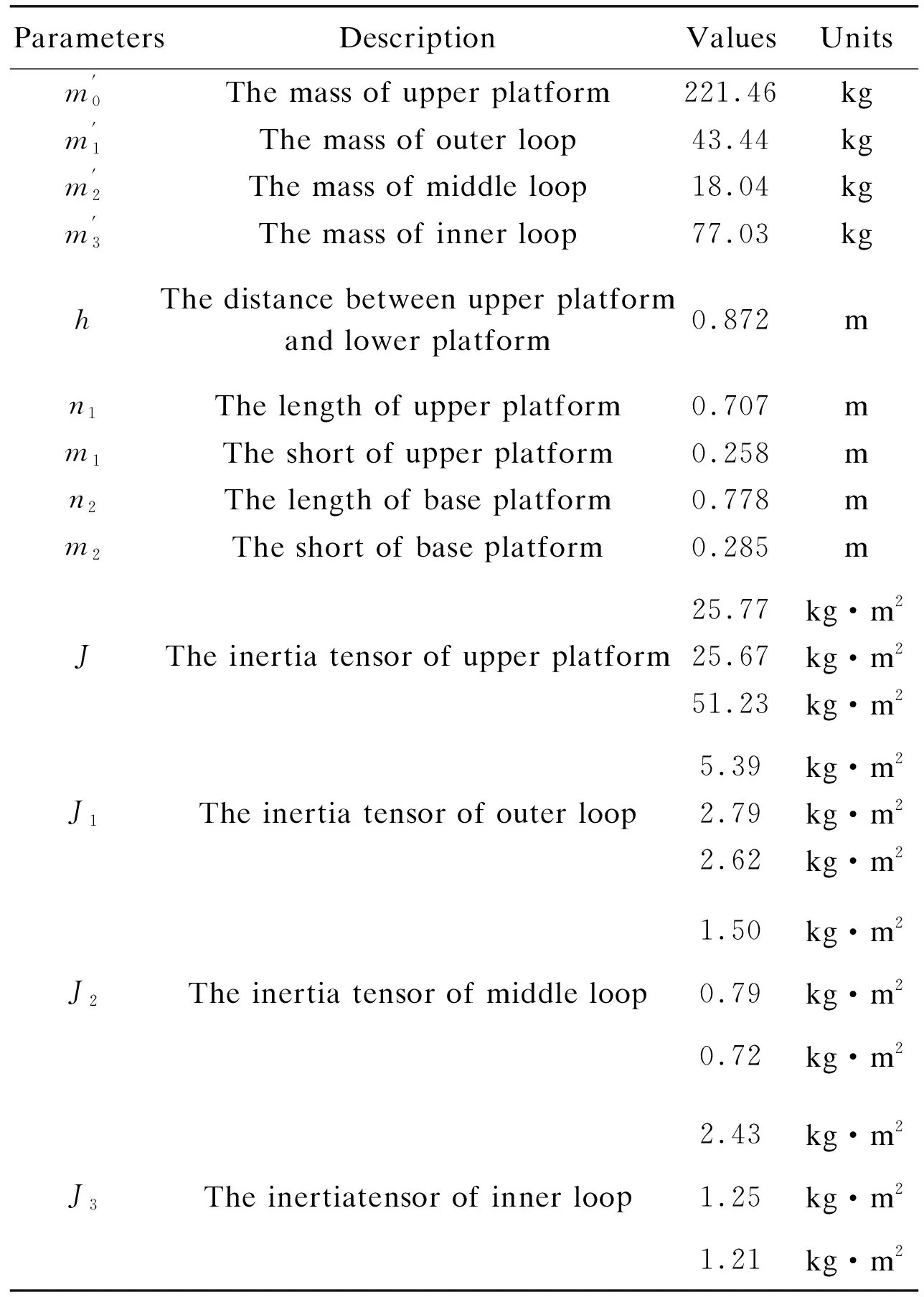
Table 1 Actual parameter values of flight simulator
As shown in Fig. 8,F1,F2,F3,F4,F5,F6denote the driving forces of six legs. The maximum driving forceF4is up to 886.530 N. The minimum driving forceF3is up to 162.730 N.
In Fig. 9, the driving moments of outer loop, middle loop, and inner loop are irregular. Outer loop’s driving moment is bigger than those of the middle and inner loops.
In order to overcome the shortcoming of traditional parallel platform, a novel platform is proposed for flight simulator, which is composed of standard platform and three-axis turntable. Compared with traditional parallel platform, this nine-degree-of-freedom platform is capable of 360 degrees tilting motion and translation. Standard parallel platform has six degrees of freedom and three-axis turntable has three degrees of freedom. But during the simulation of six degree of freedom, standard parallel platform usually provides three translational motions for working cabin, and three rotational motions are provided by three-axis turntable. So, the platform’s translations and rotations are decoupled, which makes kinematic analysis much easier.

Fig. 7 The diagram of simulation animation
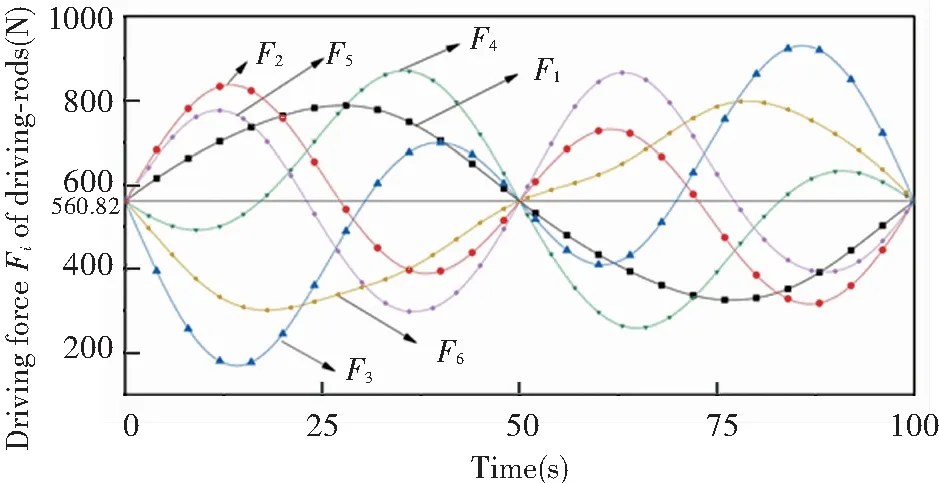
Fig. 8 The driving forces of the drive rods
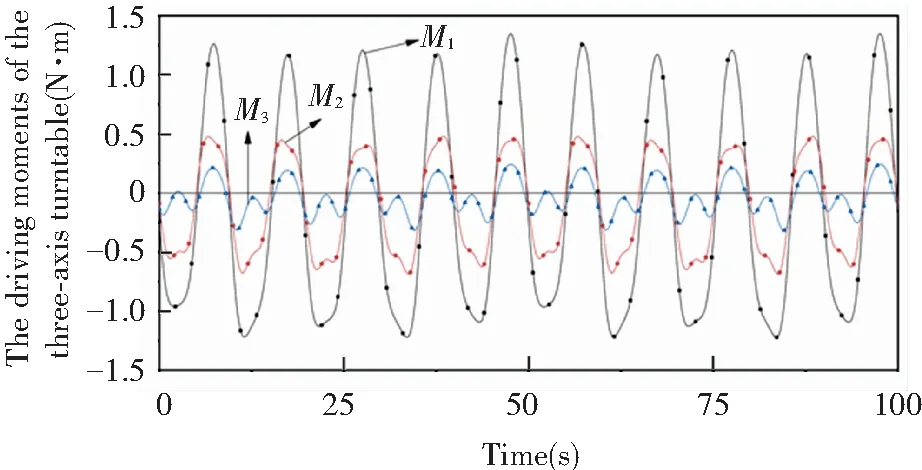
Fig. 9 The driving moments of the three-axis turntable
Due to the character of three-axis turntable, 360 degrees overturn can be easily achieved. So, the novel platform overcomes the weakness of traditional parallel platform, whose rotation angle is limited to ±20-30 degrees. This research provides theoretical support for the feasibility of 360 degrees spinning flight simulator.
5 Conclusions
This paper proposes a new type of flight simulator and introduces the model, which is based on the inverse kinematics method and Newton-Euler method. The theoretical analysis of the kinematics and dynamics of the simulator and the simulation analysis based on the Simulink platform were performed. Theoretical and simulation results show that the flight simulator can achieve six-degree-of-freedom motion, meanwhile the cabin can achieve 360-degree rotation in space, which restores the complex motion of the aircraft flying in the air to a greater extent. The flight simulator is helpful for pilots to obtain better training in the laboratory, and the research results in this paper also have certain reference value for the design and analysis of flight simulators.
杂志排行
Journal of Harbin Institute of Technology(New Series)的其它文章
- Optimal Kinematics Design of MacPherson Suspension: Integrated Use of Grey Relational Analysis and Improved Entropy Weight Method
- Model-Free Predictive Control for a Kind of High Order Nonlinear Systems
- Power Control Based on State Space Strategies for Grid-Oriented Inverters with LCL Filters
- Research on Sound Absorption Method of Perforated Tube with Shunt Hedge
- Optimal Motion Planning of the Space Manipulator for Minimum Reaction Torque to Satellite
- Investigation on Liquid Breakup Regimes and Atomization Performance of Slinger