Optimal Kinematics Design of MacPherson Suspension: Integrated Use of Grey Relational Analysis and Improved Entropy Weight Method
2022-05-20QinShiFeiZhangYikaiChenandZongpinHu
Qin Shi, Fei Zhang,2, Yikai Chen* and Zongpin Hu
(1. School of Automotive and Transportation Engineering, Hefei University of Technology, Hefei 230009, China;2. Anhui Domain Compute Co., Ltd, Hefei 230000, China)
Abstract: Selecting design variables and determining optimal hard-point coordinates are subjective in the traditional multiobjective optimization of geometric design of vehicle suspension, thereby usually resulting in poor overall suspension kinematic performance. To eliminate the subjectivity of selection, a method transferring multiobjective optimization function into a single-objective one through the integrated use of grey relational analysis (GRA) and improved entropy weight method (IEWM) is proposed. First, a comprehensive evaluation index of sensitivities was formulated to facilitate the objective selection of design variables by using GRA, in which IEWM was used to determine the weight of each subindex. Second, approximate models between the variations of the front wheel alignment parameters and the design variables were developed on the basis of support vector regression (SVR) and the fruit fly optimization algorithm (FOA). Subsequently, to eliminate the subjectivity and improve the computational efficiency of multiobjective optimization (MOO) of hard-point coordinates, the MOO functions were transformed into a single-objective optimization (SOO) function by using the GRA-IEWM method again. Finally, the SOO problem was solved by the self-adaptive differential evolution (jDE) algorithm. Simulation results indicate that the GRA-IEWM method outperforms the traditional multiobjective optimization method and the original coordinate scheme remarkably in terms of kinematic performance.
Keywords: front wheel alignment parameters; GRA; IEWM; self-adaptive differential evolution algorithm; SVR
0 Introduction
The kinematics characteristics of a suspension system represent the relationship among the vertical travel of the wheel and the wheel alignment parameters (camber angle, toe angle, kingpin inclination angle, and caster angle), wheel spacing, as well as the height of the vehicle roll center[1]. These parameters remarkably affect the handling and stability of a vehicle[2]. Optimizing the coordinates of suspension hard-points is effective to improve kinematics performance.
Extensive research into the optimization of coordinates of hard-points of vehicle suspension has been conducted. Excessive computational efforts are required when all the coordinates are considered design variables due to the high number of coordinates of hard-points. To address this issue, sensitivity analysis is usually used to select the most significant coordinates affecting the kinematics parameters of the vehicle, e.g., wheel alignment parameters, sideslip of tire, tread, wheelbase, roll center height, Ackerman rate, and minimum turning diameter[3]. However, the selection of coordinates as design variables is usually an arbitrary process to a certain extent because the influence of each coordinate of hard-point on different kinematics parameters varies greatly.
In addition to this issue, conflicting objectives also cause difficulties in the multiobjective optimization of the values of coordinates. In a multiobjective evolutionary algorithm (e.g., sequential approximation optimization, NSGA-II, IP-GA, and grey family design algorithm), multiple optimization objectives are separated in the entire optimization process and are minimized or maximized at the same time to obtain a solution repository[4-7], well-known as a Pareto front[8]. The number of solutions in Pareto front increases with the increase in the number of objective functions. In this event, selecting the best solution is very challenging due to the large number of solutions available[9]. To this end, few approaches, such as the kε-optimality method, the greedy reduction algorithm, and the adjoint sensitivity approach, have been proposed in previous studies to find an optimal solution in a Pareto front[10-12]. However, these methods are extremely subjective.
In summary, two significant issues exist in previous studies on the kinematics optimization of vehicle suspension as follows: a) influence of a hard-point coordinate on different wheel alignment parameters is diverse, thus selecting a group of hard-point coordinates with the greatest influences on the overall suspension kinematics performance as design variables is difficult; b) In multiobjective optimization, objective methods to select the optimal solution from the Pareto front are limited.
These issues can be solved through the use of single-objective optimization. Specifically, the sensitivities of a design variable to different wheel alignment parameters can be converted into a single comprehensive sensitivity index, which facilitates the screening of design variables. Similarly, by means of the transformation of a multiobjective optimization function into a single-objective function, the optimal solution can be solved directly. Thus, selecting the optimal solution from the Pareto front is unnecessary.
Previous methods of transforming multiobjective optimization into single-objective optimization include the weighted sum method, the main objective method, and the stratified sequencing method[13-15]. However, these approaches lack objectivity in selecting weights of sub-objectives in the transformation process. The optimization results of the weighted sum method will be biased toward the subobjectives with larger orders of magnitude. The main objective method considers only the most important subobjective during optimization. The stratified sequencing method follows the idea of optimizing relatively important subobjectives first. Therefore, the results can be undesirable in situations, where multiple subobjectives have similar importance.
Grey relational analysis (GRA) is an important multivariate statistical analysis method for evaluating multiple conflicting indicators in the field of decision making. It transforms multiobjective responses into a single indicator, i.e., grey relational grade (GRG), through the comparison between the performance sequence and the ideal reference sequence[16]. In addition, the improved entropy weight method (IEWM) based on information theory can reflect the uncertain performance information of random variables. It can be used as an unbiased and objective method to determine the weight of each performance index in GRG. Therefore, the present study bridges the research gap of previous studies by proposing the GRA-IEWM method, which eliminates the subjectivity in the selection of design variables and multiobjective optimization.
The remainder of the paper is organized as follows: In Section 1, the system dynamics model of McPherson suspension is developed, and its accuracy is validated through field test. Section 2 selects design variables based on the objective method, namely, IEWM-GRA. In Section 3, the approximate model between the objective functions and the hard-point coordinates is formulated using support vector regression (SVR) and fruit fly optimization algorithm (FOA) at first. Then, a single-objective optimization function toward the improvement of suspension kinematics performance is formulated using the IEWM-GRA method again. In Section 4, comparisons among the IEWM-GRA method, the original coordinate scheme, and the traditional multiobjective optimization method are made in terms of kinematic performance. Section 5 concludes the findings and points out possible research directions in the future.
1 Development and Validation of Full Vehicle Model
As the basis of the research, the dynamics model of the front MacPherson suspension was developed initially on the basis of the parameters of an A0 class vehicle, which was accomplished by the ADAMS/Car. The system consisted of a knuckle, tie rod, spring, shock absorber, lower control arm, and tire.
The original hard-point coordinates of the left front MacPherson suspension are listed in Table 1. The left and right suspension hard-point coordinates are symmetrical around the longitudinal axis of the vehicle. Thus, the hard-point coordinates of the right front MacPherson suspension are omitted.

Table 1 Original hard-point coordinates of the left front MacPherson suspension
A multibody dynamic model of the entire vehicle was developed to validate the accuracy of the MacPherson suspension (Fig. 1). The full vehicle model consists of MacPherson front suspensions, torsion beam rear suspension, steering system, tires, powertrain, and body. The accuracy of the vehicle model was verified through the pylon course slalom test, steering-returnability test and ride comfort test of the actual vehicle (Fig. 2). The parameters of the vehicle model and the detailed comparisons, which have been documented in the previous work, were omitted for brevity[17]. The previous results showed good reliability of the vehicle model; thus, it was used for subsequent optimization and analysis.

Fig. 1 Multibody dynamics model of the A0 class vehicle

Fig. 2 Pylon course slalom test
2 Selections of Suspension Design Variables by Using IEWM-GRA
2.1 Sensitivity Analysis of Suspension Hard-Point Coordinates
If all the suspension hard-point coordinates are considered design variables, then excessive computational efforts are required in the optimization process. To solve this issue, sensitivity analysis should be carried out to select the coordinates with the greatest impact on wheel alignment parameters. With respect to the left front suspension, the previous research revealed that the locations of the tie rod outer point, the tie rod inner point, the lower control arm outer point, the lower control arm front point, and the shock absorber upper point are important factors that affect the kinematics characteristics[18]. Thus, these alternative coordinates were selected for sensitivity analysis performed in ADAMS/Insight. Two levels were set for each coordinate, i.e., the minimum and maximum value of variation range of the coordinate. Then, the L214(215) test matrix was selected. For each test, the parallel wheel travel test was performed in the ADAMS/Car by using the following excitation function:
S=50×sin(360×t)
(1)
whereSstands for the vertical position of the wheel (mm), andtis time (s). A total of 100 simulation steps were found.
The results of the sensitivity analysis are shown in Table 2. This finding indicates that each coordinate has various effects on the front wheel alignment parameters. Thus, selecting the design variables directly is difficult.

Table 2 Sensitivity of suspension hard-point coordinate
2.2 Formulation of Single-Objective Optimization Function Using IEWM-GRA
The problem of selecting design variables can be addressed through the IEWM-GRA method. GRA is a method to deal with problems with uncertainties, few data, and poor information. Its basic idea is to judge the correlation of two sequences in accordance with the similarity of geometric shapes of sequence curves. It transforms discrete observations of system factors into piecewise continuous polylines. Then, in accordance with the geometric characteristics of polylines, a model to test the degree of correlation is developed. When the geometry of the polylines is similar, the degree of association between the sequences is great, and vice versa[19].
In GRA, GRG is an important index to evaluate the multiple responses. GRG reasonably determines the relationship and similarity between two different sequences by using the geometric similarity of sequence curves in the system. However, one issue associated with the GRG in previous studies is the calculation of weight of each performance index. The commonly used methods for determining weight are the Delphi method[20], the analytic hierarchy process[21], and the fuzzy comprehensive evaluation method[22]. The first two methods rely on experts’ knowledge to subjectively determine the weight of each subobjective. However, the fuzzy evaluation method tends to overemphasize the importance of extreme values, thereby causing the losses of effective information.
Entropy weight method (EWM) is an objective method based on information theory, where entropy is an index to measure the disorder of the system. A larger entropy represents a greater variety of responses. However, in the entropy weight method, if all entropy values approach 1, then a small difference in entropy value may cause a large change in the entropy weight of an index, thus the weights of some indicators are inconsistent with their importance[23]. IEWM can overcome the drawback of EWM and provide an objective and accurate approach to calculate the weight of each performance index in GRG by modifying the formula of entropy weight[24].
Thus, through the integrated use of GRA and IEWM, the sensitivities of a design variable to different wheel alignment parameters can be converted into a single comprehensive sensitivity index, which facilitates the screening of alternative design variables.
A multiobjective decision making problem is assumed to havenalternatives andmevaluation indices. Normalization of the response variables was performed initially; it can either be minimization (cost attribute) or maximization (benefit attribute). The maximization attribute is normalized as follows[25]:
(2)
The minimization attribute is normalized as
(3)


(4)

GRG is calculated by the following equation:
(5)
whereγidenotes GRG,λjrepresents the weight assigned to each indexj.Parameterλjis determined using IEWM. The general steps for the implementation of the IEWM are as follows:
Step 1. Raw data standardization. The original data matrixZis defined as follows:
(6)
Normalization of the original data matrix is obtained as follows[27]:
(7)
whererijrepresents the normalized value of thej-th evaluation index on thei-th alternative.
Step 2. Define the entropy of IEWM
The entropyHjof thej-th index is calculated by the following equation:
(8)
whenrijis zero, lnrijis zero.
Step 3. Evaluate the indicator weight of IEWM
The weightλjof thej-th evaluation index is determined as follows:
(9)
(10)
(11)
2.3 Selection of Design Variables Based on IEWM-GRA
GRG was used as the comprehensive sensitivity index, in which IEWM was used to determine the weight of sensitivity of each wheel alignment parameter. The weight of each wheel alignment parameter is shown in Table 3, and the GRG values of alternative design variables are shown in Table 4.

Table 3 Weight of sensitivity of wheel alignment parameter using IEWM
According to the results of Table 4, the following nine hard-point coordinates with the highest GRGs were selected as design variables: control arm frontz, control arm outerx, control arm outery, control arm outer z, damper upperx, damper uppery, steering rod innerz, steering rod outerx, and steering rod outerz.These coordinates are denoted asx1,x2, …,x9.
3 Formulation of Single-Objective Optimization Function of Suspension Kinematics Performance
3.1 Approximate Model between Objective Functions and Hard-Point Coordinates
Developing an approximate model between design variables and optimization objectives is the basis for subsequent optimization process. SVR is a machine learning approach based on structural risk minimization[28]. Compared with the traditional approximation methods, such as the response surface method and the Kriging model, SVR not only has good generalization ability, but can also effectively solve the dimension disaster problem. Thus, SVR was used for the development of the approximate model.
In SVR, penalty factor and kernel function parameter are two important training parameters that affect the performance of regression[29]. Traditional methods for SVR parameter optimization mainly include trial-and-error and cross-validation[30-31]. These methods have large errors and high calculation cost, and only local optimization can be achieved. FOA is a metaheuristic algorithm proposed and popular in recent years; it is characterized by a simple mechanism, few control parameters, fast convergence, and strong global search capability[32]. FOA was used to optimize the parameters of the SVR approximate model to improve its accuracy and efficiency. The flowchart of the FOA-SVR method is illustrated in Fig.3.

Table 4 Grey relational coefficient and GRG

Fig. 3 Flowchart of FOA-SVR method
The FOA-SVR model should be developed by fitting the data of the parallel wheel travel test. In ADAMS/insight, DOE screening (two-level) method was used to design the parallel wheel travel test. For the nine design hard-point coordinates, 512(29) sets of the simulation data of all tests were derived. Among them, 412 sets of data were randomly selected as the training set, and 100 sets of data as the test set. The values ofCandγof the SVR approximate model, which were optimized by FOA, are shown in Table 5.
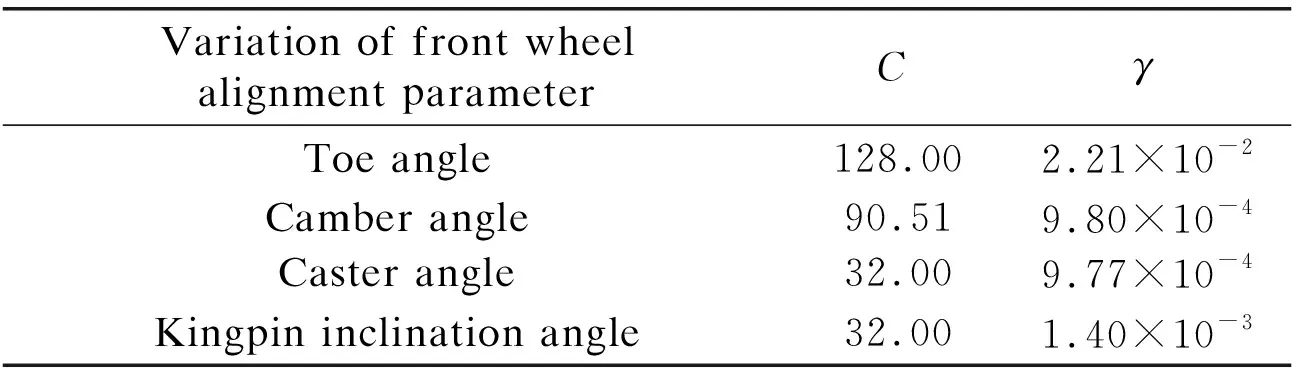
Table 5 Optimal value of C and γ
FOA-SVR approximate models between the variation of the front wheel alignment parameters, and the coordinates of suspension hard-points were formulated using the following excitation function:
(12)
(13)
(14)
(15)
wherey1(X), …,y4(X) represent the variation of the toe angle, camber angle, caster angle, and kingpin inclination angle during wheel travel.ld(d=1,2,3,4) denotes the number of support vectors.bs(s=1,2,3,4) is the bias term.K(xi,X) refers to the Gaussian kernel function.Xis the hard-point coordinate vector,X=[x1,x2,…,x9]T.
To verify the reliability of the FOA-SVR models, 100 sets of test data were substituted. The comparisons between the predicted values and the true values are shown in Fig. 4. Several goodness-of-fit and accuracy indices are used to evaluate the model (Table 6).

Fig.4 Comparison between the predicted value and true value of the FOA-SVR model: (a) variation of toe angle; (b) variation of camber angle; (c) variation of caster angle; (d) variation of kingpin inclination angle
As shown in Table 6, the MAPE (Mean Absolute Percentage Error) values ofy1(X),y2(X)…,y4(X) are 2.91%, 0.24%, 0.11%, and 0.13%. The MSE (Mean Square Error) of each model is lower than 0.001. Therefore, the models have good accuracies. TheR2of the models is higher than 0.99, ensuring a desirable goodness-of-fit.

Table 6 Performance of the FOA-SVR model
3.2 Single-Objective Optimization Function for Suspension Kinematics Characteristics
Multiobjective optimization functions for suspension kinematics characteristics was determined using the FOA-SVR approximate models as follows:
(16)
The multiobjective optimization function is transformed into a single-objective optimization function by applying the GRG as follows:
where Δyi(j)=y0(j)-yi(j),i=1,2,...,n,j=1,2,...,m.y0(j) denotes the minimum value of thej-th objective function,yi(j)=yj(X). The weight of thej-th objective function,λj, is calculated by IEWM, as shown in Table 7.

Table 7 Weight of variation of front wheel alignment parameters by using IEWM
4 Analysis of Optimization Results
4.1 Solution of the IEWM-GRA Optimization Method
After the formulation of the single-objective optimization function, an optimization algorithm should be determined to solve the function. Differential evolution (DE) is a stochastic evolutionary algorithm based on population difference[33]. The basic idea is to generate the initial species randomly within the feasible range, cross and mutate the initial population, and select the population according to the survival rule of the biologically fittest. DE has been widely applied for its easy implementation, good convergence, and strong global optimization ability. In the DE algorithm, crossover factor CR and mutation scaling factorFare two critical parameters to determine the convergence speed and population diversity. Evidently, the traditional DE algorithm uses fixed F and CR, which are selected from previous experience and adjusted on the basis of the time-consuming trial-and-error. However, for better convergence, these parameters should be changed during evolution. An efficient DE-variant self-adaptive differential evolution (jDE) algorithm, which has self-adaptedFand CR during the search process, was used to solve the single-objective optimization function[34].
In Eq. (17),y0(j) is obtained by the jDE algorithm. Then, the jDE algorithm was applied again to solve the single-objective optimization problem. The fitness value curve is shown in Fig. 5. The figure illustrated that the fitness value reaches the optimum when the iterations exceed 110. The optimal values of the nine design variables derived by the jDE algorithm are [4.492, -2.916, -702.483, 11.770, 29.500, 595.000, 93.889, 130.079, 81.322]. The left and right suspension hard-point coordinates are symmetrical around the longitudinal axis of the vehicle. Thus, the optimal hard-point coordinates of the front right suspension can be obtained accordingly.
4.2 Solution of the IEWM-GRA Optimization Method
To evaluate the effectiveness of the IEWM-GRA optimization method, it was compared with the traditional multiobjective optimization method and the original coordinate scheme (the hard-point coordinates are shown in Table 1).

Fig. 5 Fitness valve curve of the jDE algorithm
In the traditional multiobjective optimization, in accordance with the sensitivity analysis results of Table 2, nine hard-point coordinates (control arm frontx, control arm outerx, control arm outery, control arm outerz, damper upperx, damper uppery, steering rod innerx, steering rod outerx, and steering rod outerz) with relatively high sensitivities were selected as design variables[18]. On the basis of the data of orthogonal tests in Adams/Insight, an approximate model of front wheel alignment parameters and hard-point coordinates was developed using the response surface method[35]. Then, the multiobjective optimization functions were formulated. Subsequently, optimization functions were solved using the GA algorithm. The algorithm stops when a precision is satisfied or the number of iterations reaches 1000. The nondominated Pareto front was then obtained with 1000 iterations, consuming approximately 15 min for a typical-performance computer. The computation time is three to four times that of the IEWM-GRA optimization method. Finally, a solution was selected from nondominated Pareto solution set by using the direct weighting method[17], which is also a subjective method. The optimal coordinates
are [13.550, -3.007, -699.593, -11.790, 29.571, -594.942, 100.73, 127.546, 80.765].
The parallel wheel travel test was carried out in the ADAMS/Car with the suspension parameters, which are derived from the three methods. The changes in front wheel alignment parameters with wheel travel are illustrated in Fig. 6. Specific variation values of front wheel alignment parameters are given in Table 8.

Fig. 6 Changes of front wheel alignment parameters based on three methods

Table 8 Comparisons among three methods
Evidently, Fig. 6 and Table 8 show that compared with the original coordinate scheme, the reductions of variations of the toe angle, camber angle, caster angle, and kingpin inclination angle using IEWM-GRA method reach 50.21%, 31.43%, 1.94%, and 15.91%, respectively. The IEWM-GRA method also outperforms the traditional multiobjective optimization method in terms of variations of toe angle, camber angle, and kingpin inclination angle, with reductions up to 37.3%, 21.7%, and 12.1%, respectively. However, an increase (21.9%) in the variation range of the caster angle is also observed (These reduction ratios can be calculated from Table 8). This phenomenon can be explained by the proposed IEWM-GRA method that ensures the ideal overall results. However, a subfunction may not achieve its best value. Generally, the IEWM-GRA method improves the kinematics performance of the vehicle suspension and enhances the computational efficiency of the optimization process effectively.
5 Conclusions
An important issue associated with the traditional multiobjective optimization of suspension geometric design is the lack of objectivity. In addition, the search performance of the optimization algorithm deteriorates sharply as the number of optimization objectives increases. Concerning these issues, a method is proposed to convert multiobjective optimization into single-objective optimization in geometric design of a MacPherson suspension system through the integrated use of GRA and an IEWM. The following conclusions can be drawn:
1) GRA is a desirable index reflecting the complicated interrelationships among the designated performance characteristics. However, IEWM is an objective and reasonable method to determine the weights in GRG. The integrated use of the two approaches eliminates the subjectivity and improves the efficiency of multiobjective optimization of vehicle suspension.
2) The FOA-SVR method has made considerable fitting results with many independent variables and show good accordance with the true values. The MAPE between the results of ADAMS simulation and those of the SVR relationship models is less than 3%, and theR2is greater than 0.99.
3) The iteration steps of the IEWM-GRA method and the traditional multiobjective optimization method are 110 and 1000, respectively. The computing time of the latter method is three to four times of the former one.
4) The single-objective optimization using the IEWM-GRA method outperforms the original coordinate scheme comprehensively, with reductions of variations of toe angle, camber angle, caster angle, and kingpin inclination angle reaching 50.21%, 31.43%, 1.94%, and 15.91%, respectively. Despite a larger variation range of caster angle, the EWM-GRA method also exhibits better kinematic performance than the traditional multiobjective optimization method.
5) As a demonstration of the IEWM-GRA method, this study focuses only on four important optimization objectives. The influences of the hard-point coordinates on other kinematics parameters (sideslip of tire, tread, wheelbase, roll center height, Ackerman rate, and minimum turning diameter) should also be considered in future studies to further verify the effectiveness of the proposed method in solving problems with higher complexity.
Acknowledgments
The assistance from engineers at Anhui Jianghuai Automobile Co., Ltd. in providing the model parameters is greatly appreciated. The authors also appreciate the valuable suggestions from Professor Guoqiang Mao of Xidian University to improve the quality of the paper.
杂志排行

Journal of Harbin Institute of Technology(New Series)的其它文章
- Finite Element Modeling and Vibration Analysis of Sprag Clutch-Flexible Rotor System
- Molecular Dynamics Simulation on Friction and Thermal Properties of FCC Copper in Nanoscale Sliding Contacts
- Numerical Modeling of a New Flight Simulator Enabling Continuous 360-Degree Spinning and Translational Motion
- Characteristics of Convection Heat Transfer in Power-Law Fluid Saturated Porous Media Channel
- Investigation on Liquid Breakup Regimes and Atomization Performance of Slinger
- Optimal Motion Planning of the Space Manipulator for Minimum Reaction Torque to Satellite