AI机器人农作物播种机的设计
2022-05-20尹向东
尹向东,王 政
(包头职业技术学院 电气工程系,内蒙古 包头 014030)
0 引言
传统播种机一般都是采用燃油动力,需要农民手持播种,需要具备一定的技巧和熟练度,且在播种的时候阻力较大,不容易操作。由于耕作收获后一般不做翻耕,土壤表面会有很多掺杂混入,掺杂使轮子附着力减弱,打滑严重,播种质量无法保证[1]。另外,自动化程度低,播种效率不高,在实际应用中存在较多问题。因此,本文研究了基于AI机器人式的自动控制装置,旨在提高播种质量和效率。
本文采用视觉、触觉传感器AI技术,在平原地区进行大规模、自动化式的播种,操作方法对专业技术要求不高,只需要根据播种农作物类型和区域设置,就可以自动化进行播种,不仅大大提升了工作效率,也减少了人工参与度,且精确率更高。
1 系统设计原理
本系统采用视觉传感器监测播种机作业过程地面平整和避障控制,触觉传感器是根据土质软硬度,便于播种机平衡进行播种操作。系统采用直流电机驱动排种器,要求直流电机和排种器转速一致[2]。行走采用类似坦克链式车轮,对复杂地形有着良好的适应性,受阻力较小,方便播种机的作业速度,保证了准确反映播种机的真实作业速度。系统采用单片机作为主控制器,对路径、区域、播种量等参数通过键盘进行设置,输入单片机系统,再由单片机控制器根据设置的参数值,进行计算,完成自动控制播种作业[3]。
系统硬件由视觉传感器单元、触觉传感器单元、单片机智能控制单元、人机接口单元和执行机构、通信模块等6部分组成。系统软件由触摸屏模块、数据处理模块、智能控制模块、电机驱动控制模块等构成。由软件驱动硬件,协调整个系统的控制过程,系统具有数据存储、输入端口/输出端口、定时功能及中断系统设定、数据的处理、对执行元件发出控制命令等功能。
本文仿真模拟系统以STM32F107工业级单片机为核心部件。配置兼容性良好的外部设备,如触摸屏输入/输出模块、视觉/触觉传感器驱动模块、无线通信模块、执行机构组成,如图1所示。
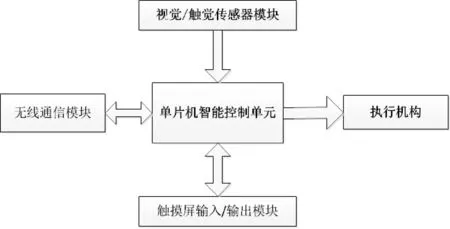
图1 播种机核心控制器组成及工作原理
当系统开机后,单片机内部进行初始化,主要是对触摸屏显示进行初始化、执行机构初始化、无线通信模块的检测,初始化后播种机处于待机状态,这是人机界面显示系统设置界面,操作人员根据土地平整度、区域范围以及适合速度等参数进行设置,设置完成后,点击“确定”,播种机开始工作。由于行动采用链式车轮,根据视觉传感器的监测信号,匹配系统设置的参数,有序进行播种,种子会放到播种机预设的种子槽内。由于设置了区域范围,所以播种机根据区域设定进行工作,不会出现不可控的情况,当出现障碍,视觉传感器会回传信息,智能控制器会根据情况,进行避障控制或停车控制。
2 播种机整机结构设计
2.1 播种机整机设计原则
系统设计要避免现有播种机播种后出现苗的布局不均匀以及疙瘩苗现象,播种器采用纱网排种方式,不仅提高了播种均匀性,还降低了成本。该机器的各项技术指标符合国家颁布的播种机标准,保证整机结构稳定性和耐用性[4]。
2.2 整机结构
新型小麦播种机主要由开沟施肥机架总成、穴播器总成、镇压轮、覆土装置等组成,其中开沟施肥机架总成、穴播器总成如图2—3所示。
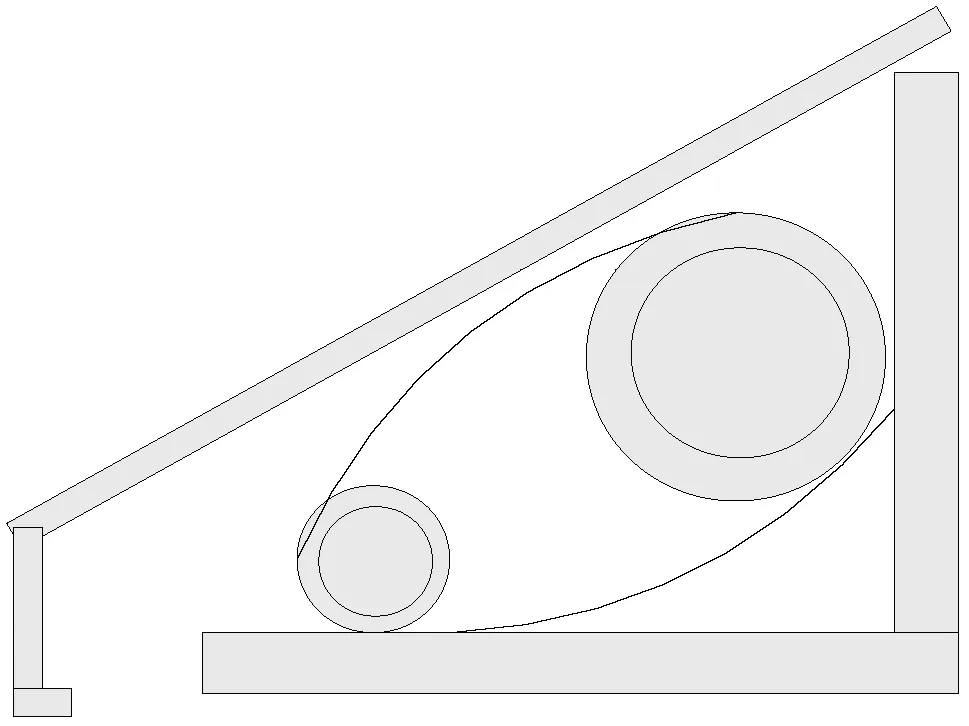
图2 开沟施肥机架总成示意
整机工作时,通过单片机控制的伺服电机驱动链式车轮进行前进和后退。车轮采用大小两个轮子转动,通过机器内部传动装置带动肥料箱外的转轴,通过螺旋式旋转将肥料推到出料口,肥料自然导入开沟器,开沟器采用旋转托盘进行施肥。在托盘上设计了一套刮土装置,以便于清除黏土。

图3 穴播器总成示意
当播种时,穴播器的托盘转动、取种器将进入种子管道,将种子甩到类似鸭嘴的容器中,鸭嘴通过破土定穴将种子排刀适合的土层。镇压器转动时将图层压实,覆土板将土覆盖均匀,完成播种工作[5]。
2.3 穴播器的结构与工作原理
穴播器的结构主要包含主轴、取种器、鸭嘴、锥形弹簧、刮种器、观察室、导种管和压盘,如图4所示。

图4 穴播器的结构
穴播器通过鸭嘴导入取种器,再由主轴驱动锥形弹簧,同时视觉监控器配合主轴工作,主轴将种子导入导种管,在种子播种过程中,刮种器进行过滤,最后进入压盘。
3 结语
目前,基于AI功能的播种器还属于研究阶段,本文的设计思路和模拟器还需要进一步完善和优化。但AI技术的应用对现代新农业的发展会起到非常重要的作用。