一种基于多传感器信息的无人直升机空地状态判定方法
2022-05-20汪真才严峰张思
汪真才,严峰,张思
中国直升机设计研究所
针对无人直升机自主起降过程的特点和需求,本文分析传统空地状态判定方法的缺点,结合无人直升机对空地状态准确性要求高的特点,提出一种基于多传感器信息的空地状态判定方法,适用于各种无人直升机和有人直升机的空地状态判定,提升无人直升机的飞行安全性。
随着电传飞控系统的发展及其在无人直升机中的广泛应用,飞行过程对检测系统的性能与可靠性的要求越来越高,而检测系统的性能会直接影响电传飞控系统的功能和性能,从而影响无人直升机的整体性能和飞行安全。
飞行器许多机载系统须采集空地状态信息,以实现对应机载系统的控制。例如,刹车控制系统采集轮载信号来判断空地状态,实现地面刹车控制;近地预警设备利用空地信号触发告警等信息。另外,飞行控制系统的一些重要控制逻辑判断也须要空地状态信息,因此空地状态信息已成为越来越重要的机载公共信息源,空地状态的检测及判定结果将直接关联地面和空中系统的工作状态。
基于单传感器信息的空地状态判定方法的缺点
目前,无人直升机基本上仅根据轮载信号来判定空地状态,而空地状态判定结果的可靠性将直接影响无人直升机的飞行安全。军民用无人直升机的起落架控制系统可提供关/开形式的轮载信号,用于表征起落架的接地与空中状态。然而,基于轮载信号的空地状态判定结果的可靠性不高,以及轮载传感器一旦发生故障,无人直升机的空地状态得不到正确的判断。无人直升机具有飞行速度快、机动性高等特点,在进行自主飞行时,尤其是自主起飞与降落过程对空地状态判定结果的准确性与可靠性要求极高。然而,在不同环境下,基于单传感器信息的空地状态判定方法存在可靠性低的问题,无人直升机将面临一定的飞行安全风险,因此基于单传感器信息的空地状态判定方法具有一定的改进空间。
飞行器空地状态判定方法有待改进
目前,有关飞行器空地状态检测及判定方法研究的文献较少。大部分飞行器空地状态判定均采用基于轮载信号的方法,目前许多学者及技术人员提出了相关优化方案。
为提升轮载信号故障定位方法的便捷性,有学者提出了一种轮载信号地面检测设备。在飞行器机载设备不替换的情况下,这种地面检测设备可快速定位轮载信号的故障通路。然而,该方案仅提高了轮载信号故障定位的速度,基于单传感器信号的空地状态判定结果的可靠性并未得到提升。
针对带有起落架缓冲支柱的有人机,另有学者提出了一种起落架轮载信号检测装置,该装置适用于安装有伸缩式缓冲支柱的飞行器。根据缓冲支柱行程伸缩的变化,飞行器起落架缓冲支柱处安装的轮载传感装置可实现空地状态检测及判断,并输出对应的状态信号,飞行控制系统收到状态信号后,实现与空地状态相对应的控制逻辑。在飞行器起降过程中,缓冲支柱伸缩具有变化的特征。设计人员将接近传感器和靶标设计在适当的安装位置,使接近传感器和靶标的感应距离能灵敏地随缓冲支柱的伸缩而变化,再判断两者感应距离是否在预设距离内,来实现空地状态判断。为了减少误判,缓冲支柱的伸缩须要一个合理的运动间距,而不同飞行器不一定都安装缓冲支柱,特别是无人机,其起落架的大小、功能、安装设计等都不相同。因此,这种起落架空地状态检测装置的通用性有待优化。
为改善起落架轮载信号检测装置的通用性,其他学者提出了一种起落架轮载信号装置和判定方法。该装置利用霍尔元件组获得信号盘的状态,并通过信号盘的展开状态及转速来判断飞行器的空地状态,具有较高灵敏度。由于该装置安装在现有飞行器的机轮上,而机轮轮径种类比起落架种类更少,所以通用性有待改善。另外,在判定空地状态时,该装置要求机轮着地和离地时产生转动,才能保证信号的准确性。因此,对具有垂直起降功能的直升机而言,该起落架轮载信号检测装置及判断方法的可靠性不高。
上述基于起落架轮载信号的空地状态判定装置及方法拥有一个共同特点,即空地状态判定基于单传感器信息,用于复杂环境下起降的有人直升机尤其是无人直升机的空地状态判定,存在较高风险。
为完善基于单传感器信息的空地状态判定方法,一些学者提出了一种基于速度保护的轮载信号使用方法,基于飞行器离地速度和预定值的滞环环节构成了轮载信号的速度保护范围。该方法将速度保护范围转换成标准动压范围,将标准动压范围与轮载信号相结合,对飞行器空地状态进行判定。相比基于单一轮载信号的方法,基于速度保护的轮载信号使用方法增加了一种传感器信息,状态判定结果的可靠性有所提升。但是,该方法须要根据飞行器的不同起飞重量,计算不同外挂构型的飞行器离地速度,将校正空速转换成标准动压,以进行空地状态判定,且校正空速转换成标准动压的计算过程会影响判定结果的实时性。因此,对起飞速度不高的飞行器或者直升机来说,该判定方法不适用。
基于多传感器信息的无人直升机空地状态判定方法
为避免单类传感器故障影响无人直升机的飞行安全,本文提出一种基于多传感器信息的无人直升机空地状态判定方法。本文实施例采用的无人直升机空地状态判定方法,融合了无线电高度信号和超声波高度信号,可提供实时、精准、可靠的空地状态标志,适用于各类无人直升机和有人直升机空地状态判定,目前已应用于无人直升机的空地状态判定,提升了空地状态信号的可靠性。基于多传感器信息的无人直升机空地状态判定方法涉及三个流程。
一是传感器信息类型选取以及各类传感器信息的测量值采集。
二是传感器信息处理。
三是传感器信息融合后空地状态判断。
对有人直升机而言,飞行员判断空地状态的重要依据之一是高度信息。直升机高度值直接反映了直升机的空地状态。因此,本文实施例对无人直升机加入多种高度状态信号,并结合机载轮载信号,来准确判定无人直升机的空地状态。
传感器信息类型选取及测量值采集
高度传感器信息包括对地测量类、空间定位类、气压类。在无人直升机起降时,空间定位类和气压类高度信息的精准性及实时性欠佳,因此本文实施例中的高度传感器信息采用对地测量类信息,即无线电高度信号和超声波高度信号。另外,前轮轮载开关、左右后轮轮载开关传感器分别提供三路轮载信号。
空地状态判定系统由飞行控制与管理计算机、超声波高度表、无线电高度表和轮载开关传感器等机载设备组成,系统模块组成如图1所示。飞行控制与管理计算机作为多传感器信息处理中心,实现空地状态判定逻辑程序运行。其他传感器装置作为信息采集设备,向飞行控制与管理计算机输入无人直升机三路开关量轮载信号、数字量无线电高度信号以及模拟量超声波高度信号。
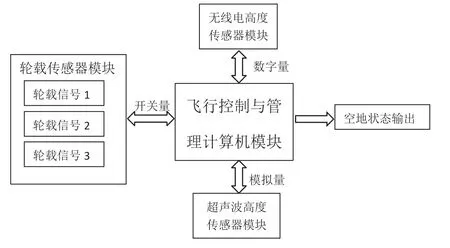
图1 空地状态判定系统模块组成框架图。
传感器数据信息处理
飞行控制与管理计算机收到数据信息后,结合历史数据,对三种传感器信息进行跳点剔除、均值滤波等数据处理,增加数据稳定性。飞行控制与管理计算机实现传感器数据信息的有效性判断及预处理。本文实施例采用如下数据处理方法。
(1)空缺数据处理

实测数据补充方法为:
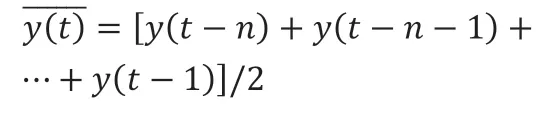
其中n为取样点数。
(2)异点剔除处理
采用移动平均方法进行异常数据处理。设yt表示实测数据值,Yt+1表示预测值,N为经过移动平均计算的历史数据数目,j=1,2,3,……,N。预测值表示为

传感器信息融合后空地状态判断
本实施例在飞行控制与管理计算机进行数据分析、判定算法计算,得出空地状态判定结果。空地状态判定方法工作流程详见图2。
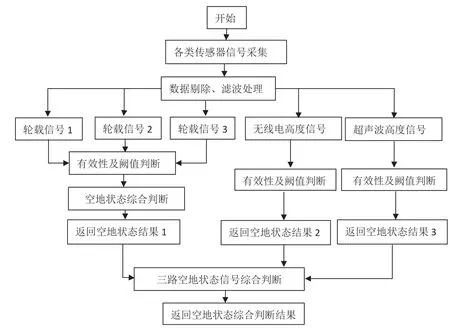
图2 空地状态判定方法工作流程图。
首先,飞行控制与管理计算机对无人直升机三路轮载信号进行判断(三判二冗余表决),得到轮载综合信号,若有两个及以上轮载信号为空中信号,则置轮载综合信号为空中;若其中两个及以上轮载信号为地面信号,则置轮载综合信号为地面。
其次,综合信息判断机构再将无线电高度信号、超声波高度信号进行空地状态阈值条件判断,随后对轮载综合信号进行综合判断,得到最终空地状态标志。
(1)传感器信息有效性分析及处理流程
在对空地状态进行判断前,飞控计算机先判断各传感器信息数据的有效性,若数据有效则进入空地状态综合判断,若无效则不参与综合判断。信息处理流程如下所述。
①三种传感器信息都有效时,飞控计算机对各传感器空地状态信号进行三判二冗余表决,逻辑图详见图3。
②仅两种传感器信息有效时,飞控计算机对两种传感器空地状态信号进行二判二冗余表决,流程图详见图4。
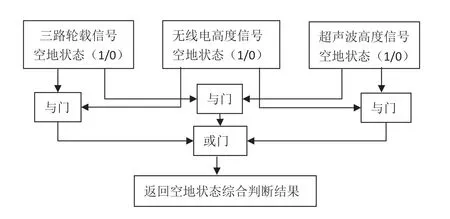
图3 三种传感器空地状态信号综合判断逻辑图。
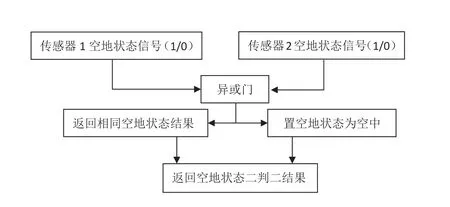
图4 两种传感器空地状态信号判定逻辑图。
③仅一种传感器信息有效时,综合信息判断机构直接输出该传感信号的空地状态。
④三种传感器信息都无效时,综合信息判断机构直接置空地状态为空中,实现安全保护。
另外,当无人直升机飞行高度到达一定高度H时,该高度为无人直升机在空中的安全飞行高度,则空地状态信号判定逻辑取消执行,以进一步提升飞行安全性。
(2)各传感器信号的空地状态判定方法
无线电高度信号与超声波高度信号的空地状态综合判断条件如下所述。
①无线电高度小于A1,超声波高度小于A2,轮载信号经三判二后的综合信号为地面作为三个判断条件,若上述两个或三个条件成立,则空地状态置为地面。
②无线电高度大于B1,超声波高度大于B2,轮载信号经三判二后的综合信号为空中作为三个判断条件,若上述两个或三个条件成立,则空地状态置为空中。
③无线电高度大于A1且小于B1,超声波高度大于A2且小于B2时,各传感器信号对应的空地状态保持上拍结果。
其 中A1<B1,A2<B2,B1、B2<H且A、B取值由无人直升机高度传感器的安装位置确定。各传感器信号有效性及阙值判断逻辑详见图5。
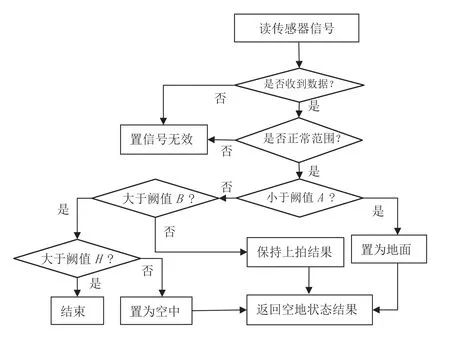
图5 各传感器信号有效性及阙值判断逻辑图。
结论
本文提出的方法增加了空地状态判定的标志依据,能够结合无人直升机多种状态特征来综合判定空地状态,可有效防止因单一状态信息无效导致的空地状态无法判定或误判,状态检测准确率有所提高,同时提高了飞行控制与管理系统的可靠性与无人直升机的飞行安全性。本文实施例中的高度传感器信息源选取与数据处理方法不固定,可根据不同机型的特点灵活调整。该方法已应用于无人直升机的空地状态判断,具有一定应用前景。

