体能训练机器人操作臂交互轨迹规划方法
2022-05-19董志,周楠
董 志,周 楠
(1.桂林航天工业学院,广西 桂林 541001;2.桂林理工大学,广西 桂林 541004)
1 引言
与人工相比,机器人在加工过程中具有操作精度和操作速度较高的特点。机器人的价格不断下降,性能稳步提升,目前,机器人技术已经扩展到智能、生物技术等领域,不仅包括传统制造业,还出现了新的机器人概念,如仿生机器人等[1]。基于此背景,研究机器人轨迹规划方法对体育训练具有重要意义[2]。
文献[3]提出基于Adams软件的机器人操作臂轨迹规划方法,该方法在Matlab软件中通过Simulink模块获得机器人操作臂各关节对应的力矩,实现机器人操作臂轨迹的规划,该方法没有分析机器人操作臂的可操作度,规划轨迹所用的时间较长,存在规划效率低的问题。文献[4]提出基于D-H参数建模法的机器人操作臂轨迹规划方法,该方法通过D-H参数建模法构建机器人操作臂关节的运动学模型,实现机器人操作臂轨迹的规划,该方法无法获得机器人操作臂的最佳传力操作位形,导致插补误差大。文献[5]提出基于齐次变换理论的机器人操作臂轨迹规划方法,该方法采用D-H法在刚体运动的齐次变换理论的基础上构建机器人运动学模型,实现机器人操作臂的轨迹规划,该方法没有计算不同方向操作臂机构对工件的传力性能,存在规划精度低的问题。为了解决上述方法中存在的问题,提出体能训练机器人操作臂交互轨迹规划方法。
2 提取操作臂力方向可操作度参数
机器人操作臂操作工件时,工件与操作臂之间处于无运动条件,其示意图,如图1所示。
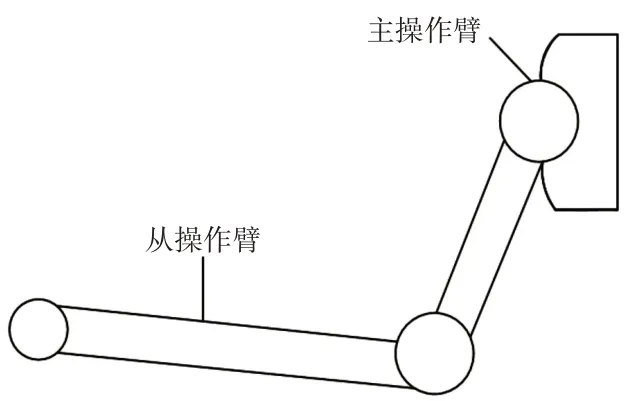
图1 操作臂示意图Fig.1 Schematic Diagram of Operating Arm
主、从操作臂与工件之间存在的广义力矢量可通过下式进行描述:

式中:f1—机器人主操作臂;
f2—从操作臂到工件上的力矢量;
m1—机器人主操作臂;
m2—从操作臂到工件上的力矩矢量。
设τ1—体能训练机器人主操作臂关节对应的广义驱动力;τ2—从操作臂关节对应的广义驱动力;τ=[τ1T,τ2T]T—广义驱动力,当工件在平衡条件下时存在下式[6-7]:

式中:J1—主操作臂的速度雅克比矩阵;
J2—次操作臂的速度雅克比矩阵。
设F代表的是工件上存在的广义力的合力,其公式为:

在操作空间中映射关节空间存在的广义力单位椭球τTτ=1[8]:

如果只考虑通过抓持点,操作臂向工件传递力时的合力为ff=f1+f2,则在操作空间中体能训练机器人操作臂对工件的力可以对单位椭球进行操作:

式中:ff—操作空间中工件的力;
p—工件的力矢量对应的单位向量;
α1、α2、α3—参考坐标各轴与力矢量之间存在的夹角;
Af—力的大小。
体能训练机器人操作臂操作工件时,通常情况下要求Af越大越好,表明在方向p上体能训练机器人操作臂对工件的传输能力在一定程度上可以通过p反映[9-11]。设W为力方向可操作度,计算公式为:

在已知体能训练机器人操作臂机构操作位形时,可通过式(6)对不同方向操作臂机构对工件的传力性能进行计算,根据计算结果获得最佳传力方向,达到体能训练机器人操作臂交互动态轨迹规划的目的。
3 操作臂交互动态轨迹规划模型
根据上述提取的机器人操作臂力方向可操作度参数,在MS⁃VM方法的基础上建立轨迹规划模型,实现体能训练机器人操作臂交互动态轨迹的规划。
设(x1,y1),...,(xl,y)l为数据样本集,假设模型属于线性,回归函数的表达式如下:

在回归估计过程中,yi-f(^x)i=0属于最理想的情况。但仅通过拟合部分数据无法达到理想状态的要求,因此为了判定回归估计模型的有效性,引入不敏感损失函数ε。当估计函数f(^x)实际值与预测值的差值小于正数ε时为无损[12-13]。
当样本数据中存在噪声时,回归模型将无法提供下一个解,为此引入松弛变量ξ,得到ε-SVR 模型目标函数的优化目标函数:
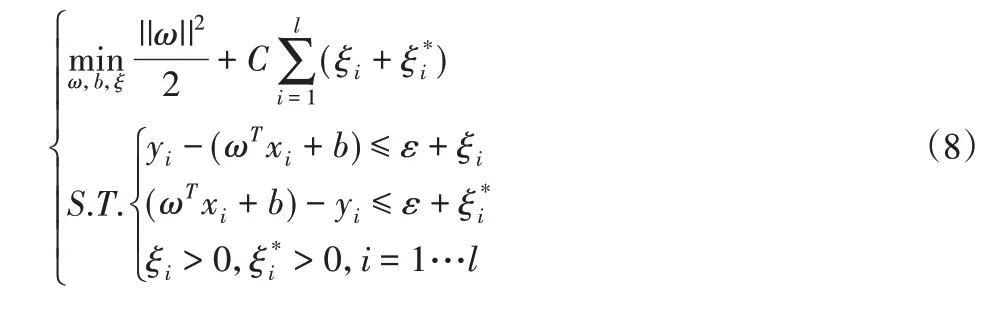
式中:C—决定回归模型扁平度的超参数。
非线性系统的回归估计在高维特征空间中实现线性回归,用核函数k(xi,x)j的隐式映射后的内积<φ(x)i,φ(x)j>代替样本点的内积[14]。通过SMO算法求取变量的极值,计算参数α,α*,获得回归估计模型:

体能训练机器人操作臂交互动态轨迹规划属于非线性问题,选用高斯径向基核函数K(x1,x2),式中:K—半正定矩阵;设σ—带宽,通过式(10)对描述单维回归模型:

通过单维输出SVR 叠加获得多维输出的SVR 多维模型为F(x)[15],通过李雅普诺夫稳定性第二定理分析非线性系统稳定性问题,存在李雅普诺夫候选函数v(x)符合式(11):

式中:x*—目标点。
通过x描述当前体能训练机器人末端的位置,获得李雅普诺夫函数,可通过式(12)描述:

目标点此时在原点处v(x*)=0。设k1为高斯径向核函数;g(x)为x与基pj的乘积,以此获得新的核函数:

在回归模型中带入式(13)的核函数,获得第j维的输出:


4 实验与分析
为了验证体能训练机器人操作臂交互轨迹规划方法的整体有效性,在Visual C++开发的TTE 平台中分别采用体能训练机器人操作臂交互轨迹规划方法(方法1)、文献[3]的基于Adams软件的机器人操作臂轨迹规划方法(方法2)和文献[4]的基于D-H 参数建模法的机器人操作臂轨迹规划方法(方法3)进行对比测试。
设定体能训练机器人的运动规划半径为65m,循环次数为30次,利用BALLUFF位移传感器采集体能训练机器人操作臂控制参数,机器人质量为42kg,运转载荷为25kN,平衡弹簧刚度为360kN/m,时延为1.8ms。
4.1 角位移测试
根据上述参数设定,分别利用方法1、方法2和方法3在上述实验平台中进行测试,以角位移为指标,角位移是指体能训练机器人操作臂以顺时针方向围绕轴点移动的角度,角位移越小,机器人操作臂轨迹规划能力越高,测试结果,如图2所示。
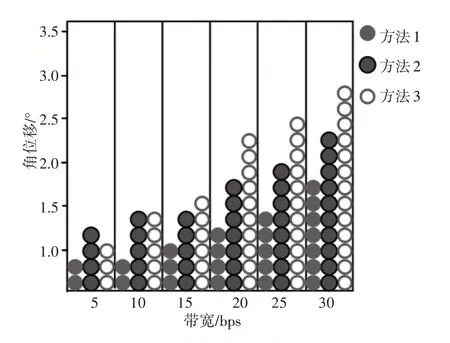
图2 角位移测试结果Fig.2 Test Results for Angular Displacement
由图2可知,在不同的带宽影响下,不同规划方法下体能训练机器人操作臂的轨迹角位移也随之变化,带宽的变化会引起体能训练机器人内部驱动装置的振荡,当带宽越大时,振荡越激烈,角位移也就越高。方法1 对体能训练机器人操作臂的轨迹进行规划时,相较于方法2 和3 对体能训练机器人操作臂的轨迹进行规划时角位移更小,最高为1.7°,这是由于方法1对体能训练机器人操作臂的轨迹进行规划时,首先对其运动方向的可操纵性进行分析,根据分析结果进行规划,有效减小了操作臂运动过程中不必要的角位移,提高了体能训练机器人操作臂的轨迹规划能力。
4.2 噪声识别值测试
考虑到体能训练机器人在工作过程中,会受到外界环境的复杂性、自身工作的不确定性以及传感器的局限性影响,因此模拟外界噪声对方法1、方法2 和方法3 进行测试,将噪声识别值作为测试指标,噪声识别值测试中,噪声识别值越高,体能训练机器人操作臂交互动态轨迹规划效果越好。测试结果,如图3所示。
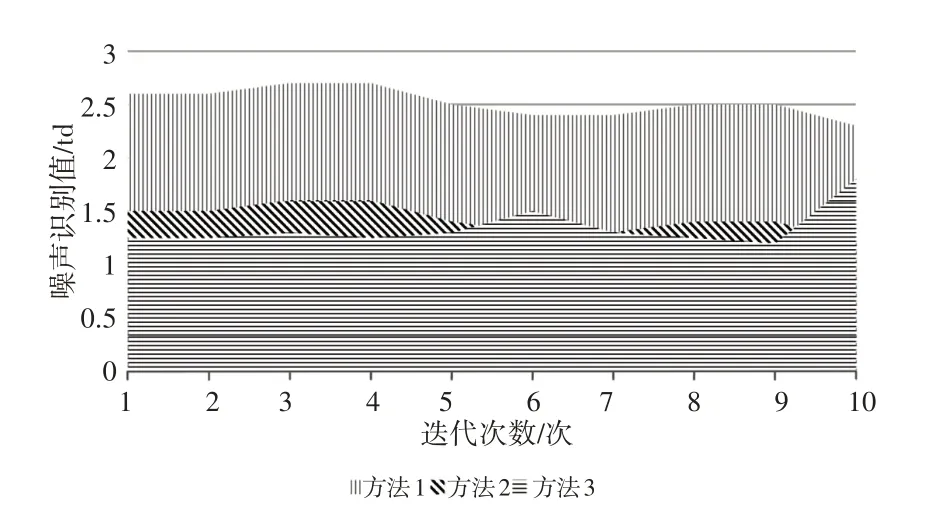
图3 噪声识别值测试结果Fig.3 Test Results of Noise Recognition
由图3 可知,在多次迭代中方法1 的噪声识别值均高于2.4td,相较于方法2和方法3的噪声识别值更高。其原因是方法1在体能训练机器人操作臂交互动态轨迹规划过程中,松弛变量优化规划模型,有效识别样本数据中存在的噪声。
4.3 扁平度测试
为进一步验证提出规划方法的规划能力,分别利用方法1、方法2和方法3测试规划模型的在不同加速度下的超参数,以此反映不同方法下的扁平度。超参数指的是式(8)中决定回归模型扁平度的超参数,扁平度为体能训练机器人运动轨迹弹性规划能力,测试结果,如表1所示。
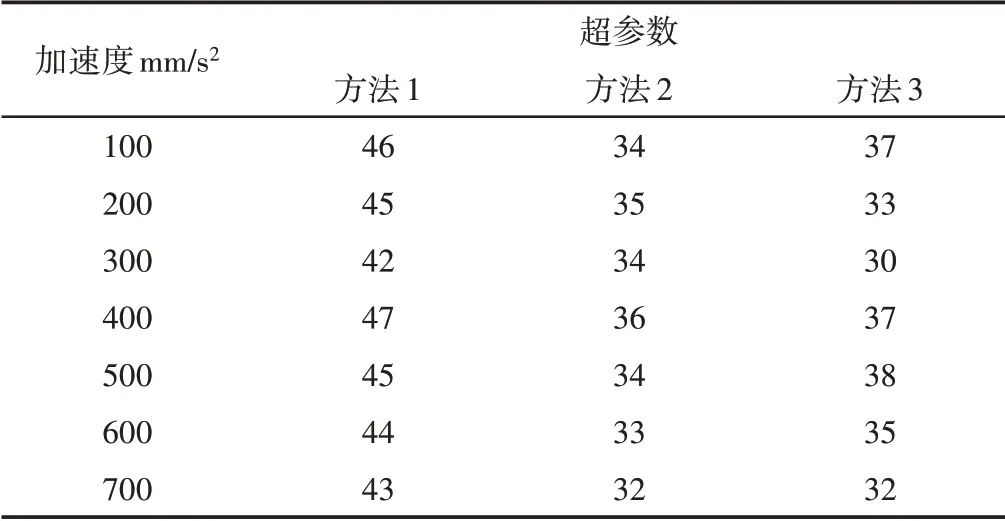
表1 扁平度测试结果Tab.1 Flatness Test Results
由表1可知,采用方法1对机器人操作臂进行规划时,获得的超参数均高于40,采用方法2和方法3对机器人操作臂进行规划时,获得的超参数均在30和40之间波动。通过上述分析可知,方法1的超参数最高。因为方法1在规划体能训练机器人操作臂的轨迹之前,对不同方向操作臂机构对工件的传力性能进行计算,根据计算结果获得最佳传力方向,实现体能训练机器人操作臂交互动态轨迹的规划。
5 结束语
机器人操作臂是一种多功能、可编程、自动控制的机械手,能够抓取物体和工具来完成不同的任务,为了提高体能训练机器人操作臂的控制精度,需要对机器人操作臂的轨迹规划方法进行研究。针对目前机器人操作臂轨迹规划方法存在角位移越大、噪声识别值低、扁平度效果较差的问题,提出体能训练机器人运动轨迹规划方法,对体能训练机器人的力方向可操作度进行分析,根据分析结果构建操作臂交互动态轨迹规划模型,实现体能训练机器人操作臂轨迹的规划,解决了目前方法中存在的问题,为体能训练机器人的发展奠定了基础。