智能网联汽车基础(四)
——先进驾驶辅助系统(中)
2022-05-19江苏周晓飞
◆文/江苏 周晓飞
5.组合收发模式
在收发组合模式下,一个保险杠内的超声波传感器首先依次发出一个超声波脉冲包。然后,超声波传感器将接收由感知范围内的一个目标所反射回来的回声脉冲。该回声脉冲在超声波传感器得到加强,然后作为数字信号转发至泊车辅助系统控制单元。泊车辅助系统控制单元根据回声脉冲的运行时间计算出目标距离。
6.接收模式
在接收模式中,超声波传感器将接收相邻超声波传感器所发出的回声脉冲。泊车辅助系统控制单元最多可分析3个超声波传感器的信号 (“三边测量“=圆割线=相邻传感器同时“监听”)。通过多个超声波传感器的信号分析,计算出车辆和目标之间的最小距离。
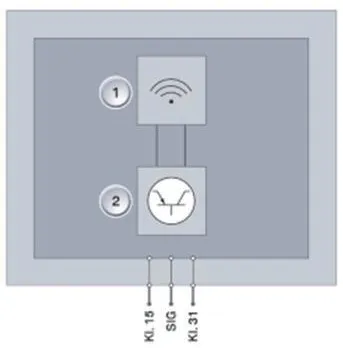
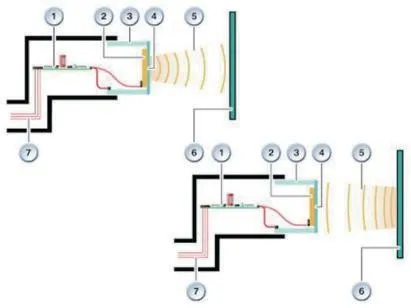
7.超声波传感器电路
超声波传感器在其电子装置中有一个可设码和可编程的内存。这样,便能有目的地对回声接收的灵敏度施加影响。因此,超声波传感器可跨车型使用。所有超声波传感器都有自己的电子装置。前后超声波传感器都有一个共同的电源和接地。
如图6、图7所示,超声波传感器由泊车辅助系统控制单元通过总线端15供电。
8.影响超声波传感器探测的因素
(1)车辆状况和周围环境可能影响传感器正确检测障碍物的能力。如传感器上有污垢、积雪或结冰等。以下情况都会影响超声波传感器的探测准确性。
①传感器被遮盖。
②车辆明显侧倾。
③在特别颠簸的道路、斜坡、碎石路面或草地上。
④由于车辆喇叭声、摩托车引擎声、大型车辆的气制动声或其他会产生超声波的强烈噪声,车辆附近十分嘈杂。
⑤附近有另一装备泊车辅助传感器的车辆,并且该车的传感器正在工作。
⑥车辆装备了翼子板天线杆或无线天线。
⑦车辆安装的牵引环。
⑧保险杠或传感器受到强烈沖击。
⑨车辆正在接近一个较高或曲折的路缘。
⑩在烈日或严寒天气中。
(2)除上列情形之外,交通标志和其他物体有时可能因其自身形状的原因被传感器判断为比其实际距离更近。障碍物的形状可能妨碍传感器对其进行检测,尤其要注意以下障碍物。
①电线、栅栏、绳索等。
②棉花、积雪和其他吸收无线电波的材料。
③有尖锐棱角的物体。
④低矮障碍物。
⑤上部朝外伸向车辆方向的高障碍物。
为避免引发事故,使用前后泊车雷达请遵守下列注意事项:
①在传感器工作范围以内,请勿加装任何物品。
②泊车雷达系统仅是驾驶辅助系统,不要过度依赖其作用。建议倒车速度不超过5km/h,泊车雷达系统持续鸣响时,立即停止倒车,此时车辆与障碍物已极其接近,谨防发生事故。
③当车速过快时,系统会退出工作,驾驶员应谨慎驾驶。
9.倒车雷达具体例举
以比亚迪唐EV倒车雷达为例,说明其启用条件、探测范围、报警距离(图8)。

(1)车速范围
车速超过10km/h 时,驻车辅助系统将停止工作。
(2)倒车雷达电源开关
①可通过倒车雷达开关或多媒体系统开启或关闭倒车雷达系统。
②电源挡位为“OK”挡情况下,EPB为释放状态,驻车辅助系统自动开启。
③系统打开,车辆周围有障碍物时,整车有报警提示;系统关闭时,无报警提示。
(3)距离显示和报警显示
①进行纵列式驻车或移车入库时,超声波传感器可测量车辆与障碍物间的距离, 并通过多媒体显示屏和扬声器进行传达。
②传感器探测到障碍物时,多媒体显示屏上将显示障碍物的方位及车辆与障碍物间的大致距离,且扬声器鸣响(表2)。
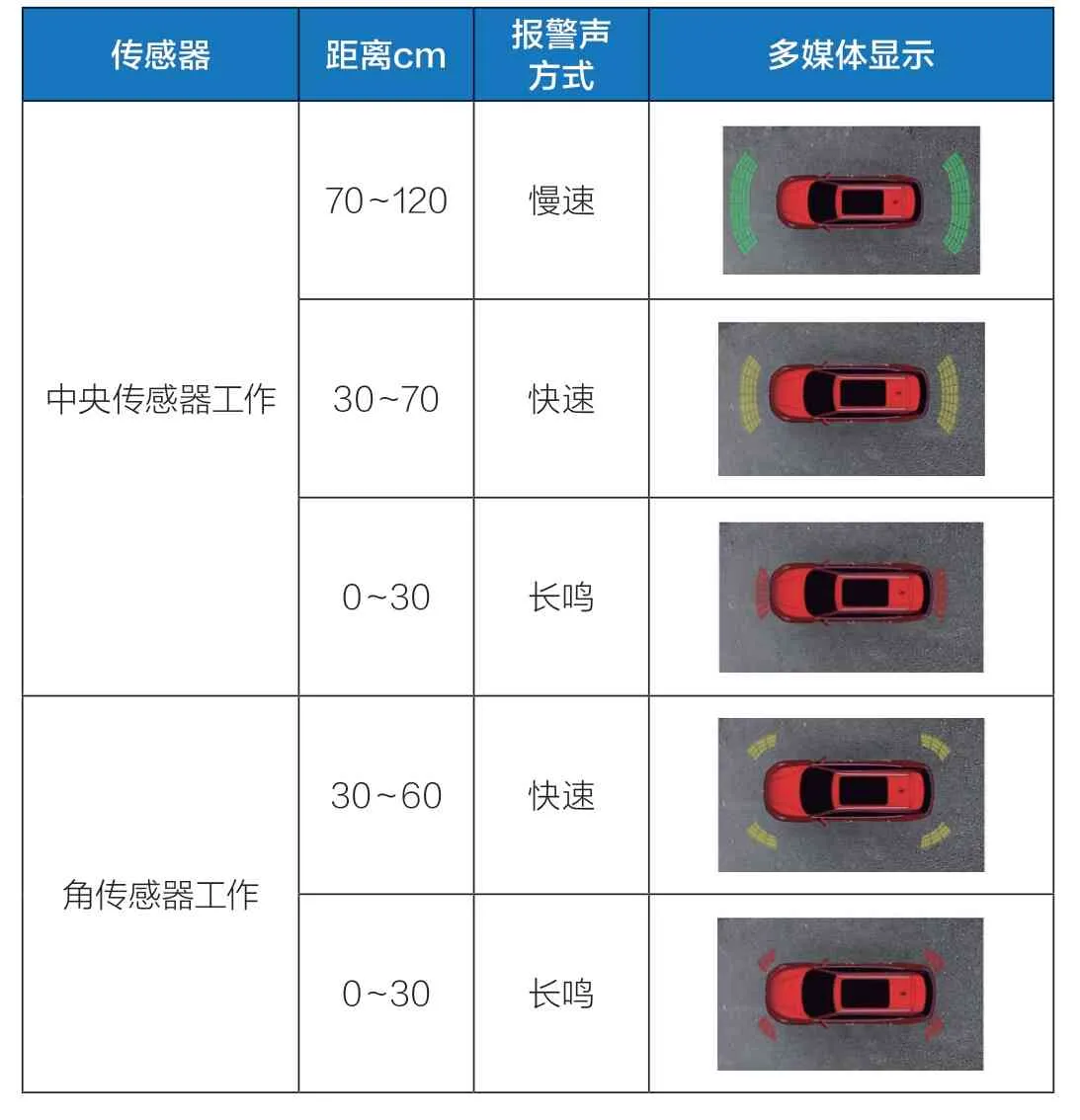
③车辆倒退时,所有传感器工作。
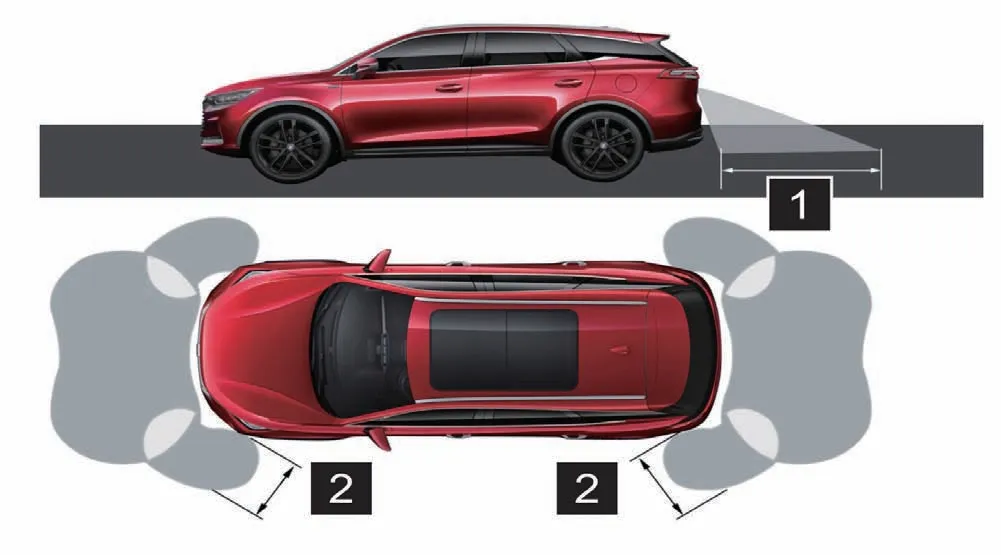
图9中显示了传感器的探测范围。探测范围有限,倒车前要检查车辆周围的情况后缓慢倒车。
10.倒车雷达故障诊断与检测
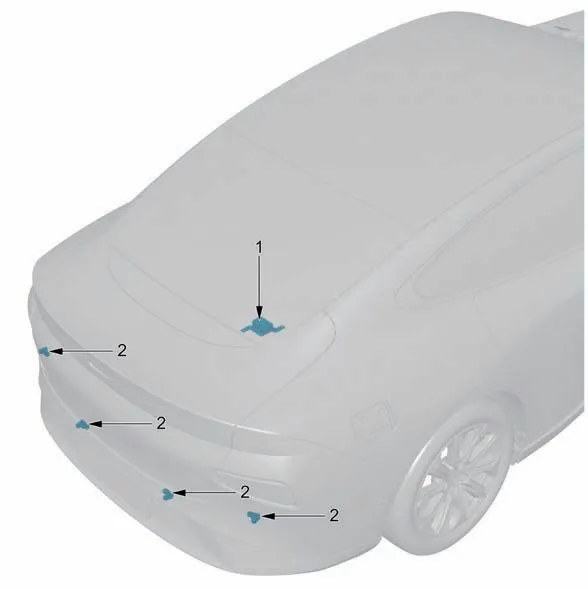
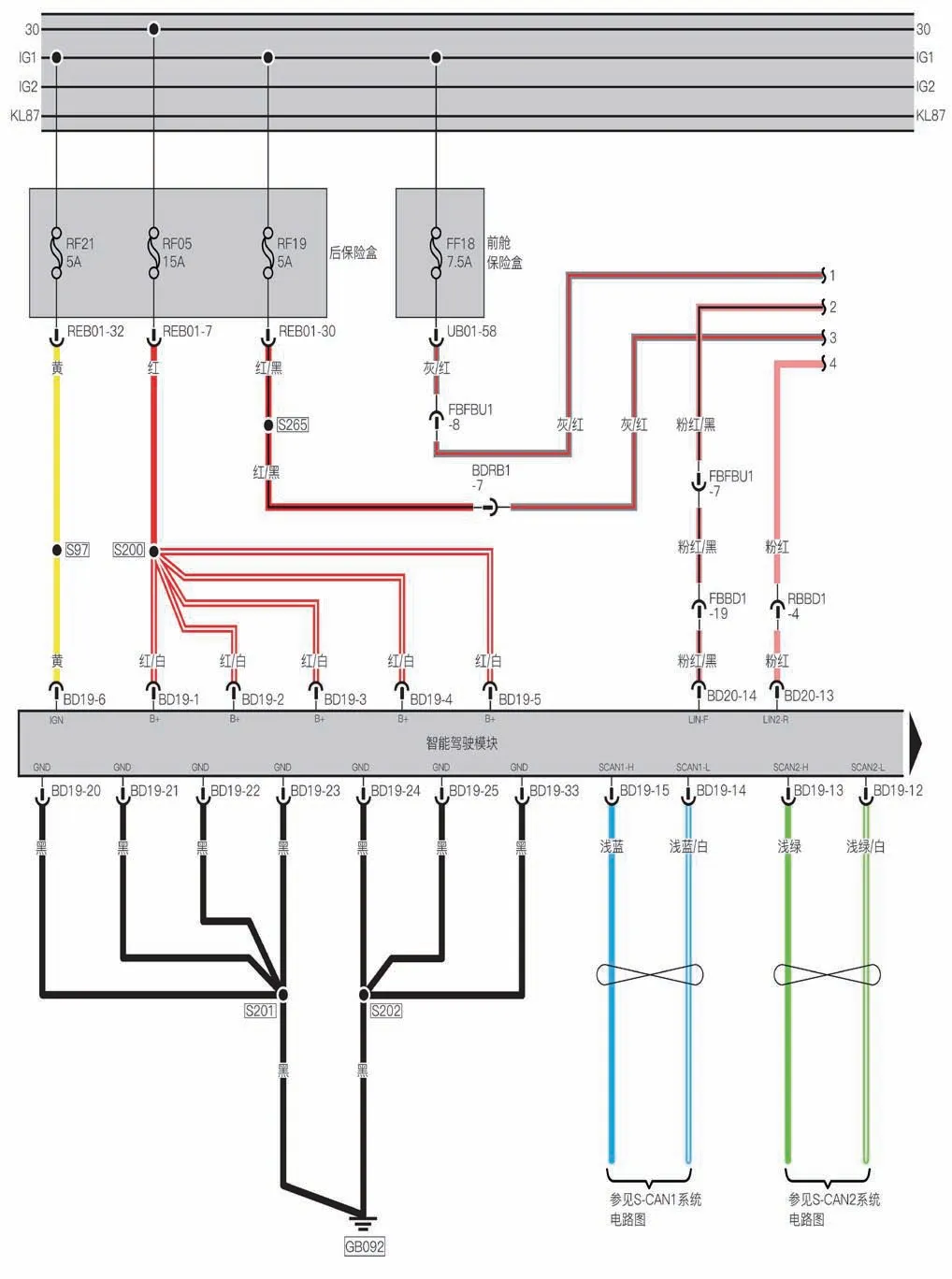
以智能网联汽车小鹏P7为例,该倒车雷达系统主要由倒车雷达控制器与4个安装在后保险杠的超声波雷达组成(图10),当检测到R挡信号并且满足车速条件时,系统开启。并根据车辆距离障碍物的距离不同对其进行不同紧急程度的报警。
(1)电路传输方式和显示
倒车雷达控制原理如图11所示。
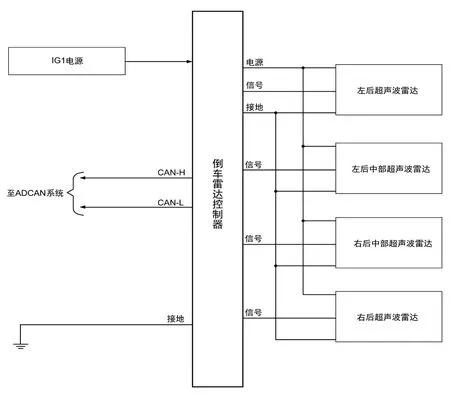
①通过超声波雷达感知车辆后方障碍物信息,并将信息通过LIN方式输入给倒车雷达控制器。
②倒车雷达控制器接收到障碍物信息后将通过CAN发送给仪表、显示大屏进行显示和声音报警。CAN总线就是控制器局域网,是德国博世公司开发的一种国际标准化(ISO)的汽车网联标准通信协议。CAN总线使用双绞线来进行通信,一条为CAN-L(低速CAN),一条为CAN-H(高速CAN)。CAN总线中,CAN-H和CAN-L的电压相加始终是5V。
③仪表/显示大屏接收到控制器的界面/声音开启信号后,根据倒车雷达控制器发出的信息进行显示和报警。
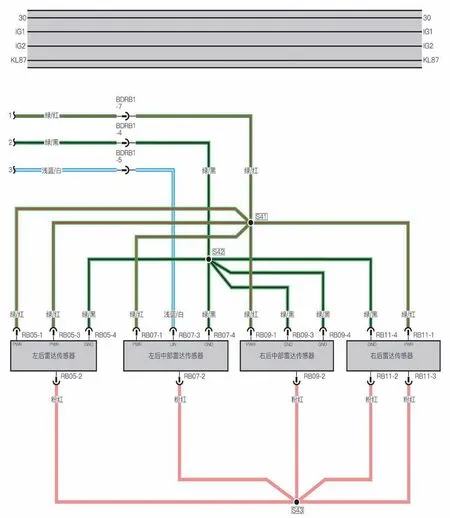
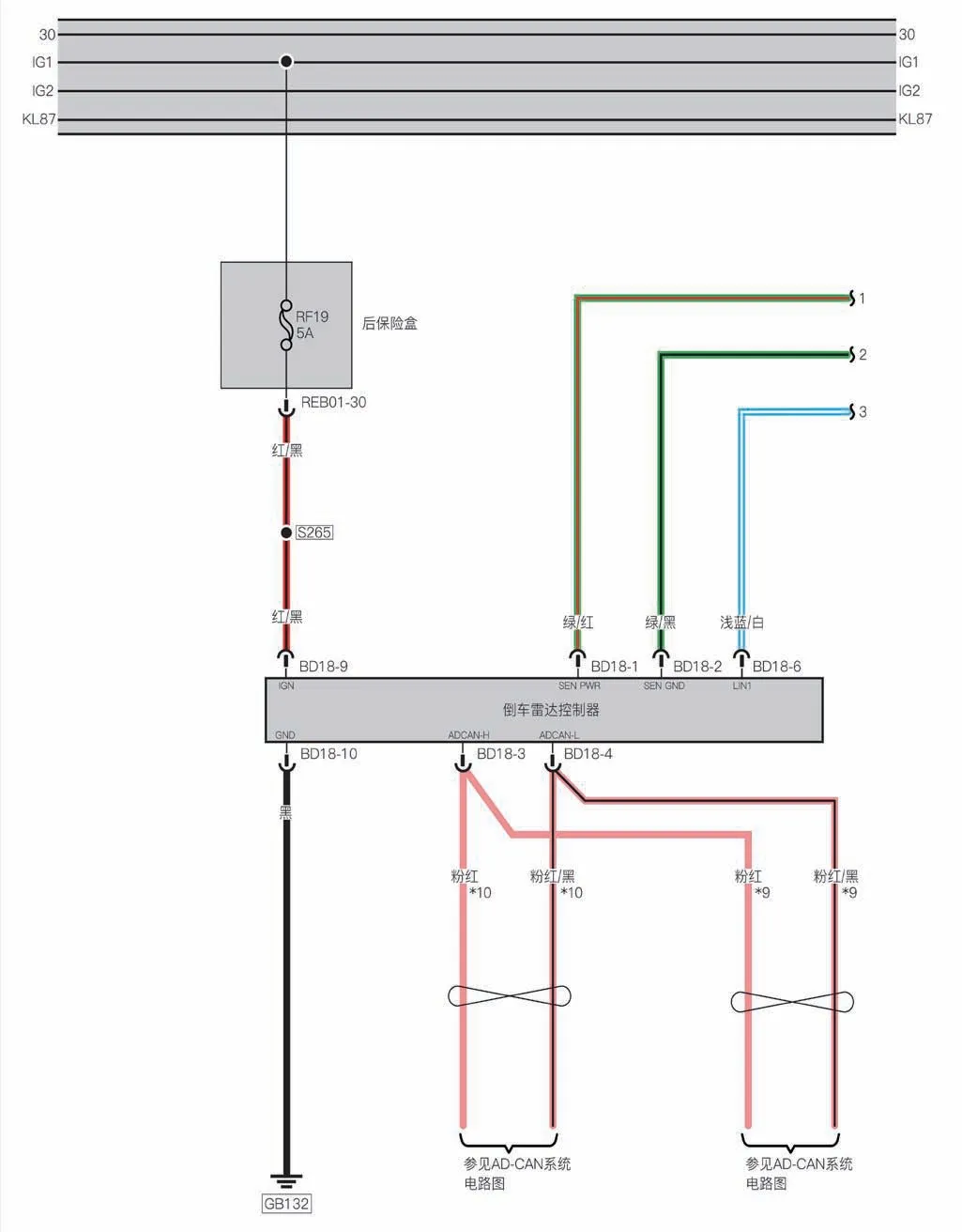
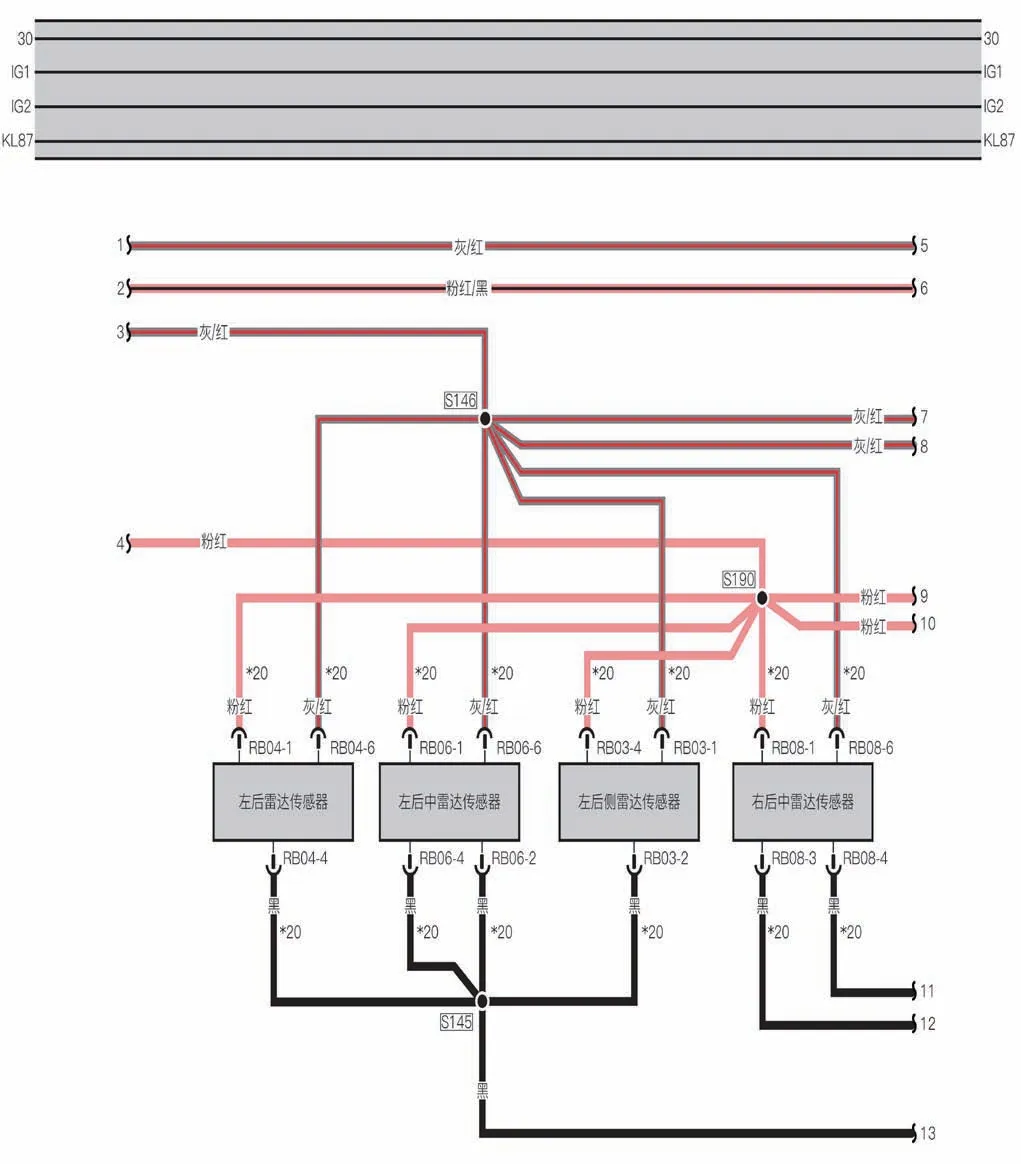
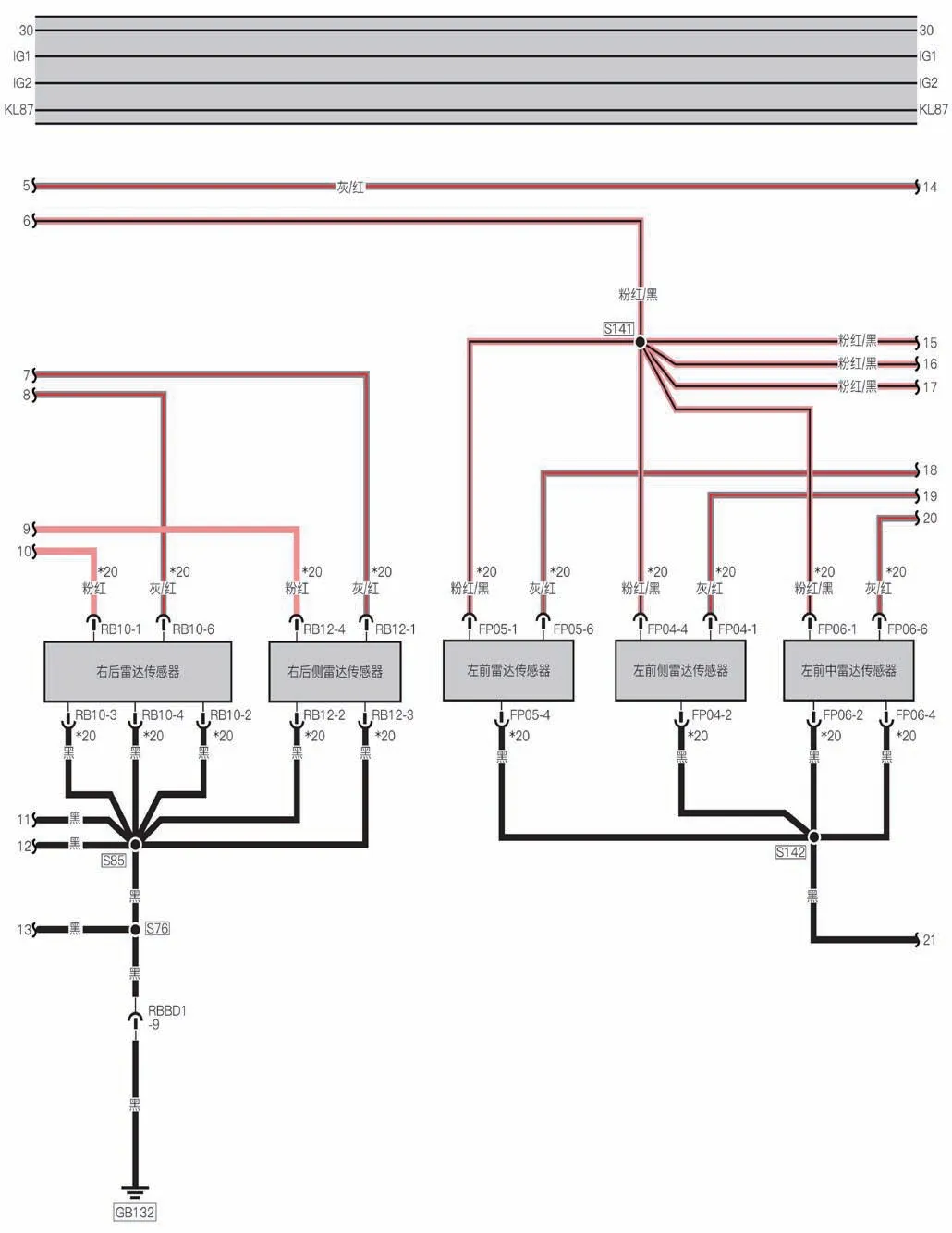
(2)倒车雷达控制电路
倒车雷达控制电路如图12、图13、图14、图15、图16所示。
(3)诊断前确定故障症状
①检测故障
使用诊断仪可通过车辆的OBD诊断接口读取故障码,通过读取诊断仪上显示的数据流和故障码,可在不拆卸任何零件的情况下执行读取开关和传感器值功能。有效的帮助解决更快的问题。
②电气检查确认故障
故障排除中最困难的情况是没有任何症状出现, 在这种情况下,必须彻底分析车辆第一时间出现的故障(比如向客户询问发现故障情况),然后模拟与客户车辆出现故障时相同或相似的条件和环境,无论维修技师经验如何丰富、技术如何熟练,如果不确认故障症状就进行故障排除,将会在修理中忽略一些重要的东西,并在某些地方作出错误的猜测。这将导致故障排除无法进行下去。
·检查易于接触或能够看到的系统部件,以查明其是否有明显损坏或存在可能导致故障的情况,包括检查熔丝和总电源情况。
·连接器接头和振动的支点是应该彻底检查的主要部位,如果可能由于振动造成故障的情况。
·用手指轻轻振动可能有故障的传感器零件,并检查是否出现故障。
·在垂直和水平方向轻轻摇动连接器。
·在垂直和水平方向轻轻摇动线束。
③倒车雷达线束连接器
故障诊断和排除要参考前述电路图和雷达控制示意图。以及表3为倒车雷达的线束连接器,根据线路情况,做出有效判断。

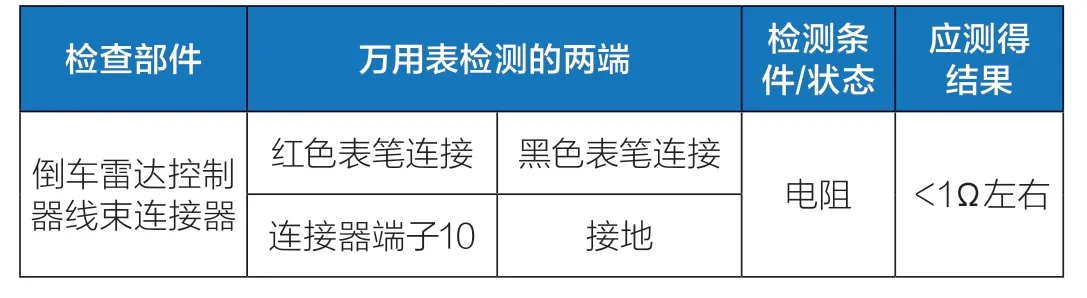
(4)倒车雷达控制器接地电路的检测
按照表4检测倒车雷达控制器电路,如果不符合表内应测得电阻结果,那么应该更换该控制器。
(5)倒车雷达控制器的CAN通讯电路的检测
按照表5检测倒车雷达控制器的CAN通讯电路,如果不符合表中应测得120Ω左右的结果,那么应该更换维修或更换线束。

如果显示故障码U2F0488,则代表CAN关闭,需要按上述(1)、(2)检测线路故障,如果上述检测都没有问题,那么需要更换倒车雷达控制器。
(6)中央网关控制器(CGW)与倒车雷达控制器之间的CAN数据通讯导线的检测
中央网关控制器(CGW)与倒车雷达控制器通讯电路见图17。
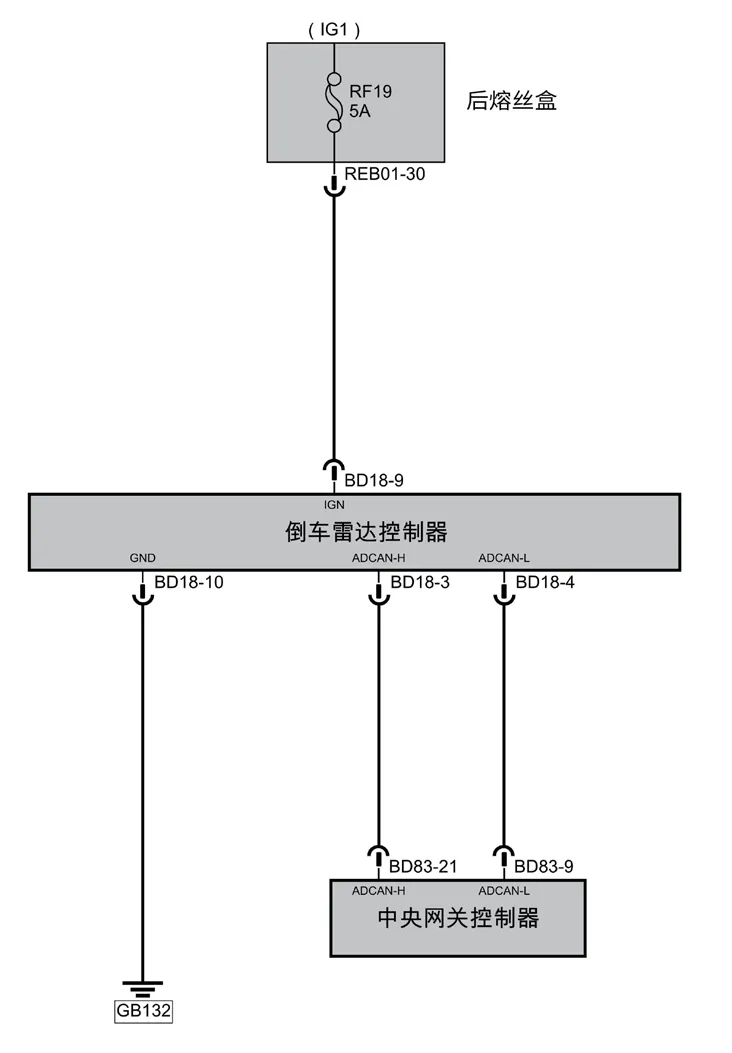
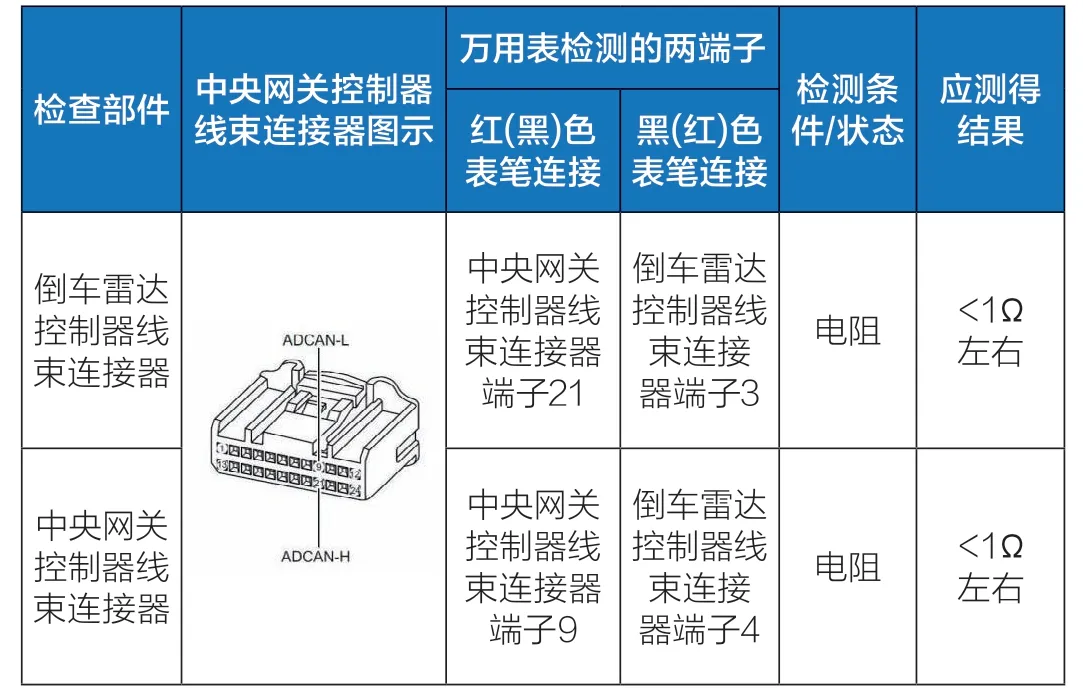
断开中央网关控制器线束连接器和倒车雷达控制器线束连接器。按照表6检测电路,如果不符合表内应测得电阻1Ω结果,那么应该更换维修或更换线束。
如果电阻值符合检测标准,故障还是“与CGW丢失通信”,那么这时候应检查中央网关控制器的供电接地导线,如果接地正常,那么可以判定故障是中央网关控制器,需要来更换解决。
表6CGW与倒车雷达控制器之间的CAN数据通讯导线电路检测
如果故障诊断仪执行故障诊断显示:“与CGW丢失通信”,那么重点检查两点,一是网关本身故障,二是CAN线路线路故障。会存在故障码,但故障报警灯不会亮。
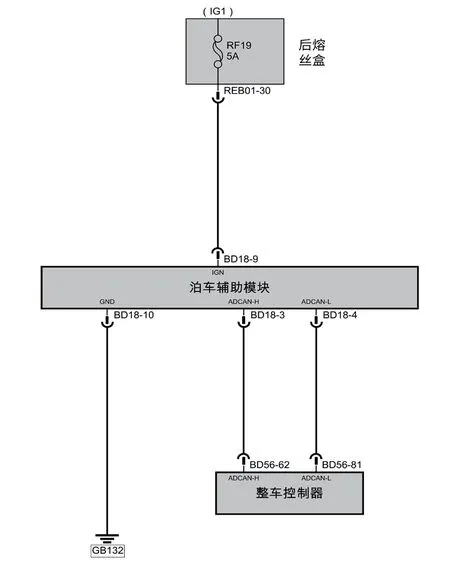
(7)检查整车控制器(VCU)与倒车雷达控制器之间的CAN数据通讯导线
整车控制器与倒车雷达控制器之间的CAN数据通讯电路如图18所示。
(未完待续)
