面向城市道路的智能网联汽车测试场平面布局设计
2022-05-18张诗波何治剑罗龙浩苟竹梅
张诗波, 张 璐, 何治剑, 罗龙浩, 刘 婧, 苟竹梅
(1.西华大学汽车与交通学院, 成都 610039; 2.浙江大学工程师学院, 杭州 310058)
智能网联汽车(Intelligent Connected Vehicle,ICV)是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、后台等智能信息交换共享,实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车[2]. 近年来,智能网联汽车的国际战略地位不断凸显,不仅是汽车产业转型升级的主要方向,也是当今国际产业竞争的焦点. 欧美日等发达国家已经将智能网联汽车提升为国家战略,我国也正在积极布局以充分参与未来国际竞争[3]. 封闭测试场作为设计、验证、评价智能网联汽车的必要平台,近年来也成为汽车领域的一大研究热点和产业发展重点[4]. 与由“硬件定义”的传统汽车不同,智能网联汽车更强调由“软件定义”,其对测试场的需求主要表现为场景[5]. 因此,传统以汽车性能测试为目标的汽车测试场已无法满足智能网联汽车测试的需求,需要构建新的以“场景”为核心的测试场[6]. 本文以智能网联汽车测试需求为背景,融合探讨面向城市道路的智能网联汽车行驶道路场景体系,并在考虑汽车行驶特性的基础上,布局形成一个封闭汽车测试场平面,最后通过仿真建模的方式验证其可行性.
1 ICV测试道路场景化需求分析
1.1 场景化测试场的作用
V模型(图1)是智能网联汽车(自动驾驶汽车)技术开发广泛采用的流程,是保证智能网联汽车安全有效必不可少的阶段,主要包括:模型在环、软件在环、硬件在环、道路在环(包括封闭道路和开放道路)等. 在这些环节中,场景是贯穿始终的要素,各个环节均需要在一定的场景下进行测试验证. 封闭测试场作为场景化的道路环境,一方面为智能网联汽车测试提供真实在环的道路,另一方面也是真实道路环境的代表性表现.
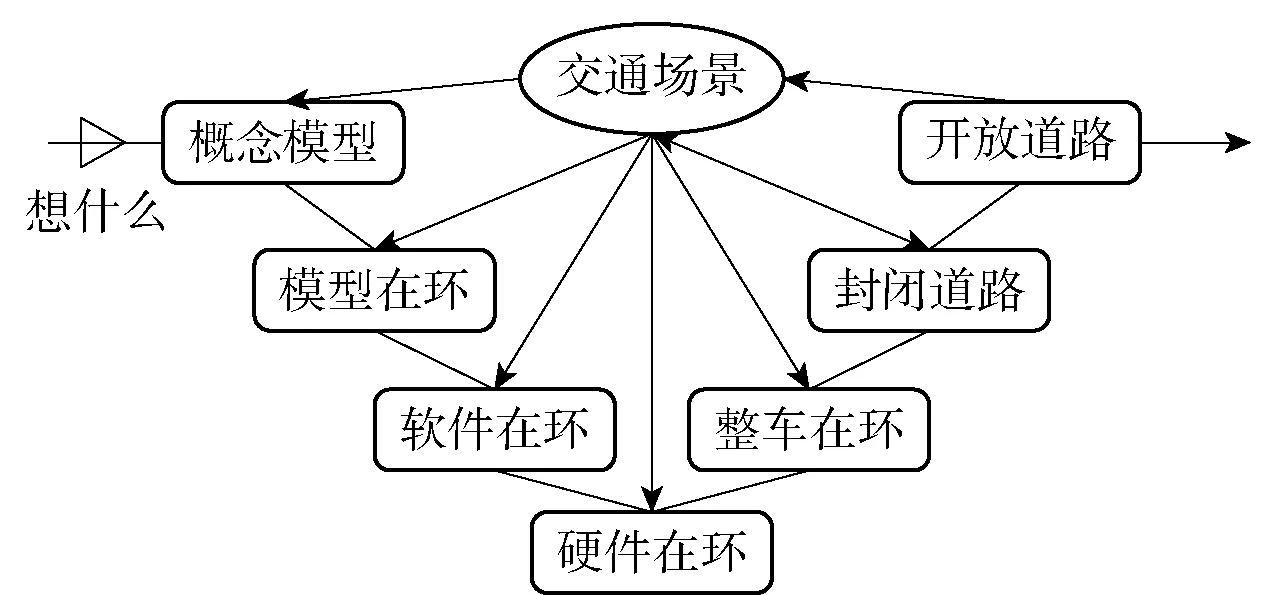
图1 智能网联汽车技术开发V模型
1.2 城市道路场景多样性特征
城市道路是指城市建成区及其郊区范围内道路的总称,分为快速路、主干路、次干路和支路[7]. 城市道路具有组成复杂、功能多样、人流量大、车辆类型复杂且交通流量大、交叉口多、交通分散、速度差别大、人流和车流易混杂等特点. 除此之外,由于城市道路依托于城市,不同的国家、不同的民族、不同地形的城市之间,城市道路的布局、技术标准、出行者行为习惯等也存在差异,这就会造成ICV车辆所面临的道路场景是多样的.
1.3 ICV智能化网联化场景需求
与传统汽车测试场主要测试汽车的动力性、制动性、操稳性、平顺性、通过性以及燃油经济性不同,ICV汽车测试主要是测试汽车自动驾驶控制及其安全的有效性. 一方面,ICV应能完成各种道路交通条件下的自动驾驶,并保证足够可靠度的可靠性,即单车智能化,主要测试ICV本身自动驾驶控制系统及各类传感器(毫米波雷达、激光雷达、摄像头等)的有效性,这对测试场的需求体现在道路形式及交通形式的多样性上. 另一方面,ICV应能完成V2X(包括V2V、V2P、V2I、V2N)的信息交互,车路协同式驾驶,即为网联化,这对测试场的需求体现在路侧设施的多样性上.
综合交通工程学中对车流变化的传统交通流模型的研究分析,需要考虑可能出现的道路场景中排队现象给ICV队列所带来的影响,ICV的排队机制会影响交叉口转向专用道的设计、匝道驶入驶出口、收费站、公交站、停车场或因强制流(发生停车)拥堵而产生排队现象等具体场景的设计,同时也需要考虑ICV的跟驰现象,这主要会影响车道数量的设计或因稳定流拥堵(不发生停车)而产生的车辆间相互制约、延迟传递的作用,对ICV测试场中路段车道的功能组合设计也有较大影响.
2 ICV测试场平面布局设计思路
ICV测试场的设计应以满足ICV车辆自动驾驶功能测试为主,充分考虑ICV智能化网联化道路交通场景需求,参照道路工程和道路设计相关国家标准和行业规范,将测试场需要的各种道路要素布设在一个有限的封闭场地范围内.
目前,ICV技术正在不断发展中,学界和业界对ICV道路交通场景需求的认识也正在不断统一中. 本文一方面参考目前已经发表的、公开可查的ICV性能指标、测试项目、场景需求等方面的研究成果;另一方面参考T/CSAE 125—2020《智能网联汽车测试场设计技术要求》[8]、《智能网联汽车自动驾驶功能测试规程》(试行)等ICV行业标准;同时参考和遵循GB 5768《道路交通标志和标线》[9]、GB 51038《城市道路交通标志和标线设置》[10]、GB 51286《城市道路工程技术规范》[11]、CJJ 37《城市道路工程设计规范》[12]、GB 50688《城市道路交通设施设计规范》[13]、CJJ 152《城市道路交叉口设计规程》[14]等一系列城市道路工程设计方面的标准和规范.
3 ICV测试场道路场景要素设计
3.1 测试场景要素分类
为了保障ICV在未来的复杂交通环境下能充分发挥其安全、效率、经济、便捷、节能等性能,参考相关指标和要求规范,本设计的交通场景主要从城市的道路平纵横线形和功能性场景2方面综合考虑,前者如基本城市道路、交叉口、弯道、坡道、隧道、匝道、车道数等,后者又包括公交站台、地铁口、施工障碍、人行横道、公交专用道、非机动车道、潮汐车道、单行道、安全岛、CBD区、机场枢纽站、客运中心枢纽站、人行天桥等.
参考相关指标和要求规范给出的测试功能及测试项目设计要求,ICV城市道路测试场应满足基本城市道路、环岛、立交模拟、隧道、人车混行区域、障碍等功能性测试. 本ICV测试场设计分为交叉口、弯道、坡道、匝道、隧道、人车混行区域等场景,各场景将通过其特性进行具体分类设计,具体分类详见图2. 除此之外,为进行误作用测试,设置井盖,为更符合真实道路场景,设置道路坑洼.
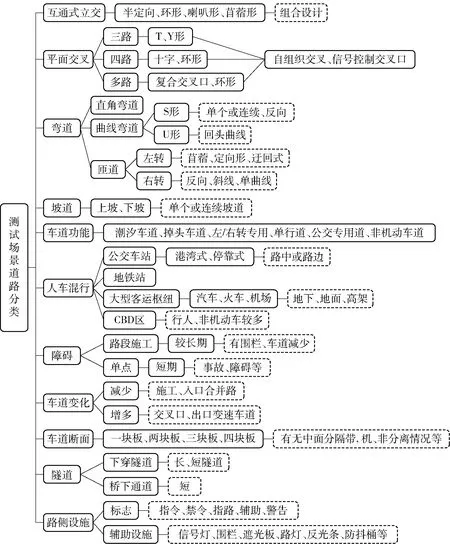
图2 ICV测试场城市道路场景分类方案
ICV测试场是检验ICV车辆智能化、网联化水平的重要场所,也是推动产业发展的关键环节. 本ICV测试场可实现对城市交通场景的模拟和再现. 可通过桥下通道考察车辆定位及通信能力,主干路可进行车辆高速超车、编队行驶及车辆耐久性测试,快速路可进行车辆上下匝道、前方碰撞预警系统(Forward Collision Warning,FCW)、自动紧急制动系统(Autonomous Emergency Braking,AEB)、车道保持系统(Lane Keeping System,LKS)、直线加速、制动性能等多项测试,次干路可进行交叉路口通行、林荫道测试、行人或动物横穿马路预警测试,停车场可进行半自动泊车、全自动泊车、障碍物检测并响应、充电站引导、自动泊车测试,隧道可进行定位和通信信号屏蔽环境下车辆通行测试,此外,还具备误作用测试、进出收费站测试、有信号灯和无信号灯环岛通行测试等.
3.2 设计要求
按照CJJ37—2012《城市道路工程设计规范》[12]关于城市道路等级的划分,在ICV测试场中设置快速路、主干路、次干路、支路4类道路,同时根据测试功能的需求,安排7种断面类型的道路(表1).
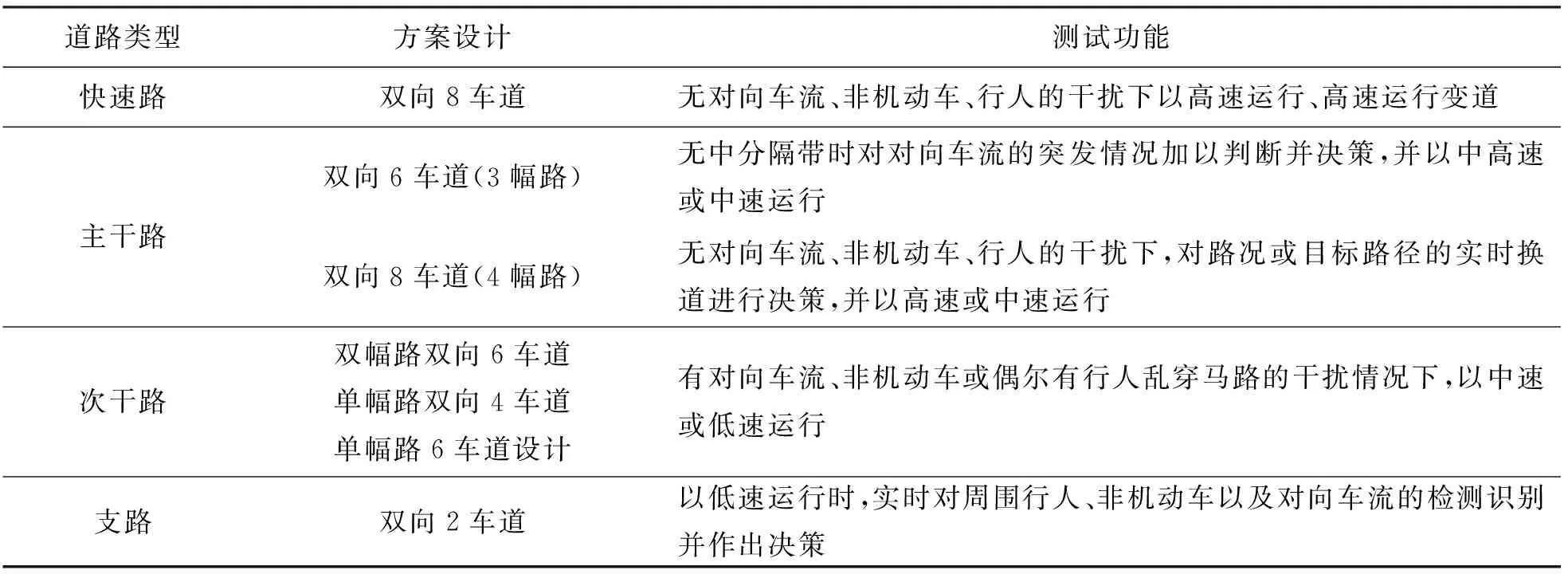
表1 ICV测试场城市道路设置方案
具体来说,参考相关标准规范中的指标要求,ICV测试场涉及的有关道路可按如下要求进行设计(其中车道宽度除个别说明之外均按3.5 m进行设计):
①基础测试路段按60 km/h(除特定的高速或低速通行路段)的速度进行设计,其最小弯道曲率半径为125 m.
②快速路(图3)的一般路段按100 km/h(除匝道或交叉口处等)的速度进行设计,其最小弯道曲率半径为400 m.

图3 快速路仿真效果图
③车道线按GB 5768—2009[9]的要求设置,颜色为白色或黄色,线型为虚线或实线.
④对于双向2车道,其直道按60 km/h设计,最小有效长度为500 m,其无加速弯道按60 km/h设计,最小有效长度取500 m,最小曲率半径为125 m,可实现跟驰、车速保持、车道保持、靠边停车测试.
⑤对于双向3车道,主要用于潮汐车道的场景,其直道和无加速弯道按第④条要求,无加速弯道按60 km/h 设计,最小有效长度取300 m,最小曲率半径为125 m,用于实现潮汐、超车、跟驰测试.
⑥对于双向4车道(图4),其速度按60 km/h设计时,要求同第⑤条,速度按100 km/h设计时,其直道最小有效长度为650 m,其无加速弯道最小有效长度取650 m,有加速弯道最小有效长度取450 m,弯道最小曲率半径均为125 m,用于实现超车、并道、靠边停车测试.

图4 双向4车道道路仿真效果图
⑦对于双向6车道(图5),按设计速度为100 km/h设计,其设计要求满足第⑥条,用于实现2/3幅路中非机动车专用、公交专用道、超车、并道测试.
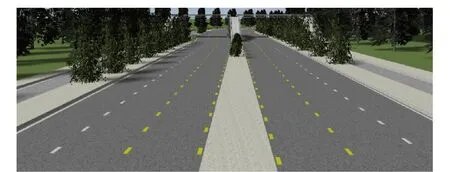
图5 双向6车道道路仿真效果图
⑧对于双向8车道,按设计速度为100 km/h设计,其设计要求满足第⑥条,用于实现快速路、主干路中2/3幅路非机动车专用或者公交专用道以及超车、并道测试.
⑨匝道设计包含在组合形互通式立交和1个平面十字交叉中;设有环形左转匝道、单曲线右转匝道和平面交叉口右转匝道(图6). 匝道设置参照JTG D20—2017[15]要求,直连式、半直连式匝道按60 km/h设计,其宽度按3.75 m,圆曲线极限半径为120 m,回旋线参数取70,长度取50 m设计;环形匝道按40 km/h设计,圆曲线极限半径为120 m,回旋线参数取35,长度取35 m设计;匝道最小总长度为200 m;用于实现转向、跟驰测试等.

图6 苜蓿形左转、环形左转匝道仿真效果图
⑩平面交叉口的设计,包括T型、Y型、十字型、X型、复合型交叉口,至少1个方向上入口直线段最小长度200 m,转弯半径考虑最不利因素按30 km/h设计,取最小曲率半径25 m,停车视距按表2所示要求设计;用于实现信号控制、转向决策测试[14].
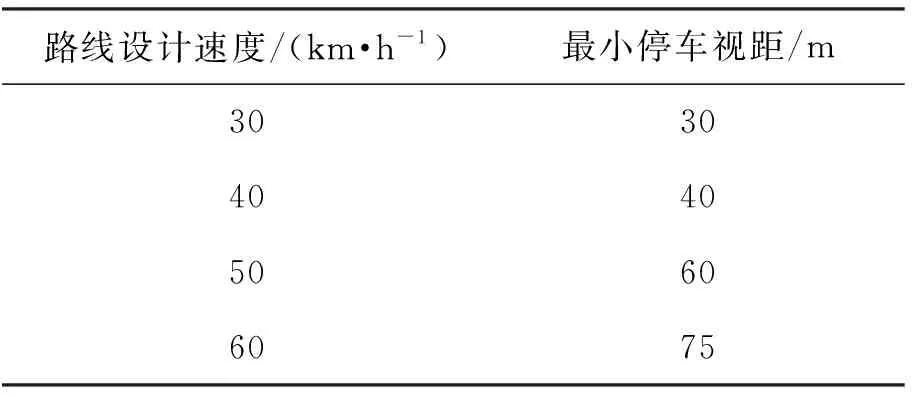
表2 平面交叉口最小停车视距要求
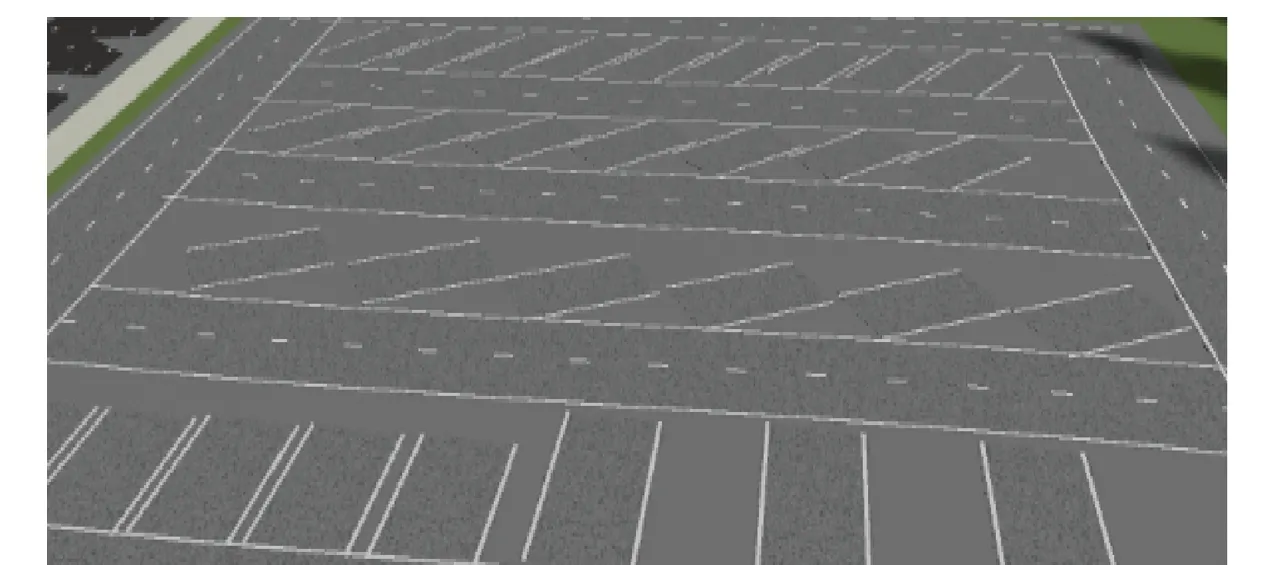
图7 停车场60、45、30度斜式车位仿真效果图
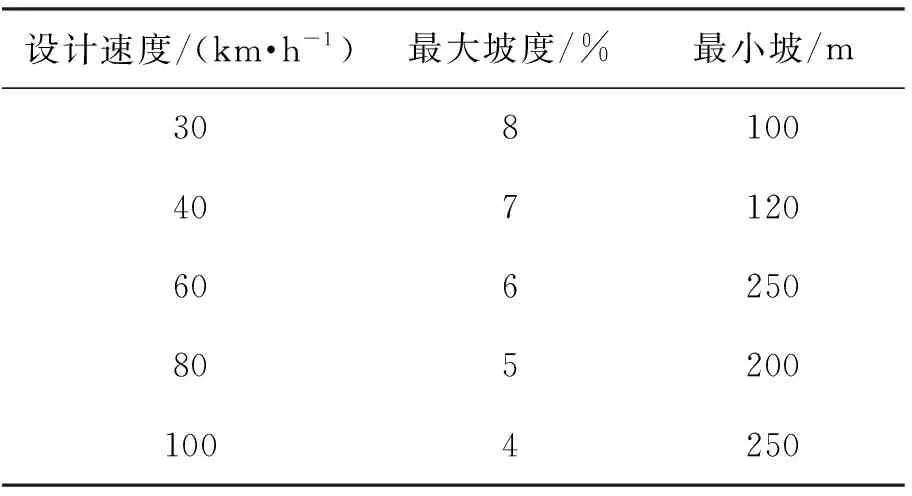
表3 设计速度、最大纵坡和最长坡长关系
3.3 总体平面布局设计
本ICV测试场设计以位于成都的某智能网联汽车测试示范项目为依托对象进行设计,其总面积为2 300 a(1.53 km2),拟长1 530 m,拟宽1 000 m,在东、西、南、北各向设计4个测试场基地的出入口.
基于以上的设计原则和设计要求,结合场地限制条件,设计出如图8所示的总体平面布局. 该布局中,共有1个互通式三路立交、1条快速环形通道、1条快速隧道、1个下穿隧道交叉口、3个桥下通道、2条主干道、1条次干道、6个四路平面交叉口、8个三路交叉口、2个五路交叉口、2个环形交叉口、多条支路,以及设有2个停车场、多个分散或聚集的住宅区、模拟式地铁口、CBD区交叉口、步行街、学校、收费站、火车站、汽车站等.

图8 ICV测试场总体平面布局图
4 仿真验证
为了验证图8所示的平面布局方案用于智能网联汽车测试的可行性和有效性,本文利用ADAS仿真系统PreScan对该平面布局下的测试场进行虚拟仿真建模.
PreScan中包含路段元素、标志标线、建筑、抽象物体、环境元素以及其他道路设施等道路设计元素,通过对这些元素进行“积木式”的组合设计或改变各元素体、面、边、顶等空间物理模型参数,实现各类道路场景要素的各部分几何构建,从而完成对整个ICV测试场交通路网布局及其几何构造的实体建模.
智能网联所需的V2X(V2V、V2I、V2P、V2N)环境,可通过PreScan联合Matlab/Simulink,对ADAS车辆各类传感器(毫米波雷达、激光雷达、摄像头等)进行仿真建模,并耦合CarSim系统获得ICV车辆在仿真测试期间的动力学响应数据.
图3~图7为ICV测试场部分场景的仿真建模结果,图9为ICV测试场整体布局仿真图. 通过加载ICV车辆进行仿真测试实验,结果表明,该平面布局的测试场能连贯、紧凑、完整的开展ICV车辆在城市道路场景的相关测试,该方案可行有效.

图9 ICV测试场仿真整体俯瞰图
5 结束语
本文以ICV在城市道路场景中的测试研究为出发点,以ICV场景测试需求为基础,按照相关指标和标准对场景进行精细化设计,以建设科学合理、贴合实际、紧凑连贯、场景完善的ICV测试场为落脚点,实现了对封闭场地的平面布局设计,并通过仿真建模的方式验证其可行有效.