V型轮在输电线路机器人的应用研究*
2022-05-12
(江苏省送变电有限公司,江苏 南京 211102)
0 引言
近年来,随着我国经济的飞速发展,架空输电线路规模迅速扩大,平均每年以不低于4%的速度增加。根据《中国电力年鉴》,截止2017年底全国高压架空输电线路总里程已超过180万公里。受限于专业技术工人队伍成长缓慢,结构性缺员情况日益严重,架空输电线路建设、运行、维护、检修等工作向智能化、自动化转型需求迫切。
现有的架空线路新型设备中,输电线路机器人以其适应性强、出勤率高、工作质量稳定、成本低,具有广阔的发展前景。输电线路机器人能在输电线路上自主地行走、跨越障碍,通过携带的视觉系统、导航系统、智能分析处理系统、作业系统等设备,可以完成或辅助人工完成线路的安装、巡视、检修等工作,且不受地形地锚、气候条件、空中管制等因素影响,工作质量稳定[1-5]。
基于导地线行走的输电线路机器人,由于相邻杆塔地面高程、塔高以及导地线弛度因素的影响,机器人在工作过程中,始终处于有一定坡度的行走路径上,因此爬坡性能是其关键的性能指标。本文从线路飞车上V型行走轮多年的应用经验出发,根据机械传动中V型带轮的设计原理,研究V型轮槽的行走轮在线上行走的力学特性,分析得出其最优设计参数,使机器人获得最佳的运动性能,提升机器人性能指标、降低功耗。
1 V型轮在输电线路机器应用的结构设计
输电线路机器人使用的V型轮是指轮槽底为V型或等腰梯形的驱动轮,考虑线上行走的轮外径的尺寸不宜过大,通常采用等腰梯形设计。该等腰梯形的底边和斜边长根据行走的导地线线径确定,其斜边的斜角最优值受不同材质的摩擦系数影响。
全尺寸的V型轮设计,在机器人沿弯轨道的导地线过桥引导杆行走时,引导杆和V型轮之间的摩擦力偏于一侧的V型斜边,致使V型轮在此处的V型轮斜边爬升,从而引发脱轮,机器人有坠落的危险。因此,全尺寸V型轮槽的设计不利于机器人线上行走平稳地过弯,鉴于此种原因,行走轮的设计可采用V型+2R型相结合的型式,详见图1。

图1 组合型行走轮结构

图2 组合型行走轮模型图
V型+2R型轮槽设计在正常行走时,V型槽底可以对导地线产生更大静摩擦力,给机器人提供更好的驱动力;在碰到障碍时,通过两种不同半径的圆弧形轮槽碾压障碍物,使过障碍更加平顺;同时,较大半径的圆弧形轮槽径R1,可以获得较大的槽顶开口而不必增大槽深,使机器人跨越障碍后落线准确度更高。
该型行走轮通常采用铝合金材质包胶或使用复合材料,兼顾摩擦力、耐磨性和轻量化。实物模型如图2。
2 V型轮在输电线路导地线行走的力学分析
2.1 刚体受力模型
V型轮在导地线上行走时,忽略其微小的弹性变形,将轮和导地线均认为是刚体,由此确定其受力模型,如图3。

图3 行走轮受力模型
V型轮在导地线上受到竖直向下的重力G,由于动力矩M的作用在两个接触点分别受两组沿前进方向静摩擦力f、垂直于V型轮斜边向上的支撑力N。
在轮子沿导地线匀速运动时,根据力平衡原理:
此时,∑X=0,∑Y=0,∑Z=0。
由图3可以明显看出,轮子受向前的静摩擦力f,而无反向的阻力,在X轴方向上受力不平衡。只有在动力矩M为0时,静摩擦力f消失,此时轮子才可匀速向前运动。
在无动力的情况下,轮子能匀速前进,此种情况显然与实际情况不符。因此,我们根据实际情况引入弹性变形情况进行修正。
2.2 圆形轮槽弹性变形状态受力模型
在实际情况下,由于轮子和导地线均不是理想的刚体,因此在接触时受到约束力影响,二者会产生弹性变形。在此情况下,二者的接触非点接触而是面接触。因此,其受力模型如图4。

图4 弹性变形状态驱动轮受力模型
在轮子静止或匀速运动的情况下,作用于轮子的主动力矩为M,产生一个对轮子的作用反力T,从而达到力偶平衡。此反作用力T可以等效为作用在点B,则B点必定在A点的前进方向侧,AB距离δ由轮子弹性形变产生[6-8]。将T沿x、y轴分解为沿前
进方向的静摩擦驱动力f和竖直支撑力N,根据力偶平衡:
N×δ+f×r′-M=0
(1)
由于轮子变形较小,可近似认为r′与轮半径R相等,整理式(1)得:
(2)

2.3 V型轮槽弹性变形状态受力模型
V型轮槽的行走轮在导地线上匀速行走时,其等效作用点为一对位于V型轮斜边上的点,此时的支撑力N垂直于V型轮斜边向上。
V型轮槽的行走轮不同于圆形轮槽行走轮,当其在线上匀速行走时,假设此时只受支撑力N,那么N=G/sinα,α趋于0°时N趋于∞,显然与实际情况不符。在实际情况下,两块竖直的板夹住圆柱体,因压力产生静摩擦力平衡重力作用,压力N不会趋于∞。由此,修正力系,此时V型轮受到重力G、支撑力N以及沿斜面向上的静摩擦力f。因此,导地线夹在其两个斜边中间,因轮产生弹性形变,当轮转动导地线自两斜边间脱开时,必然产生相对滑动,此时产生向下的滑动摩擦力。由于自等效作用点B向后方支撑力N逐渐减小,而AB之间距离极其微小,因此也可近似认为该滑动摩擦力等效作用在B点。
V型轮槽受力模型如图5。
由于图5中B点和B’点受力情况相同,取B点
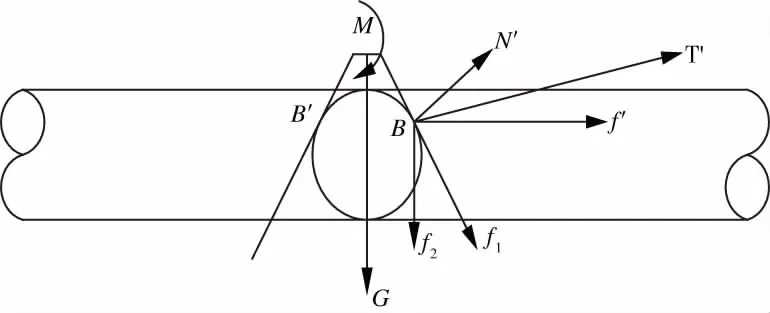
图5 机器人行走轮弹性变形状态受力模型
进行分析:作用于轮子的主动力矩为M、重力为G(在B点等效为M/2和G/2),产生一个作用反力T’,此力分解为沿前进方向的分力f’和垂直于轮槽斜面的支撑力N’,轮转动产生沿斜面向下的动摩擦力f1,其竖直方向分力为f2,设V型轮斜边斜角为α,结合图2中模型,根据力偶平衡有:
(3)
设f’和T’夹角为ψ,f′=T′×cosψ;根据摩擦力公式,动摩擦力f2=f1×cosα=N′×μ×cosα,μ为动摩擦系数。代入公式(3)整理得:
(4)
由于轮子变形较小,可近似认为r′与轮半径R相等,应用三角函数公式整理得:
(5)
(6)
对比公式(2)圆形轮槽的驱动力f,则有:
f合max>f
(7)
所以可以得出结论:
1)在同等驱动转矩情况下,V型轮槽的行走轮比圆形轮槽的行走轮可以获得更大的驱动力,具有更好的行走效果。
导地线的外层材料为铝,考虑各种行走轮材质和铝的摩擦系数,V型轮槽斜边倾角最优值应在30°~45°之间。
3 结束语
本文通过力学分析,为V型轮在输电线路机器人中应用提供理论依据,在V型轮的参数设计和材料选择上有参考价值。由上文的结论可知,V型轮最佳驱动效果的斜边倾角与摩擦系数有关,在输电线路机器人的应用中可以合理选择材料和倾角,从而获得最佳的行走效果,能够有效的增加机器人的续航里程、爬坡能力、克服风偏和覆冰的影响。
V型轮结构在机械传动的带轮设计中有着广泛的应用,实践证明其有着优异的性能。在输电线路检修的应用中,部分飞车厂家通过产品的实践验证,V型轮结构比传统的圆形轮槽结构具有更好的驱动效果,对克服挂线点高差以及导地线弛度引起的坡度有着良好的效果。
