基于滑模控制的飞行器螺旋机动、制导与控制一体化设计研究
2022-05-12吴炎烜陆胥坛王正杰
吴炎烜,陆胥坛,王正杰
(北京理工大学 机电学院,北京 100081)
随着反导与防御技术的不断成熟,传统的战术型空舰飞行器(导弹)在末段攻击中所面临的威胁愈发变大,完成精准打击的任务面临新的挑战,具备良好的突防能力逐渐成为飞行器作战任务成功的一大重要因素. 总结分析当前制约突防飞行器发展的关键问题[1]:一是当前制导策略与机动突防策略相互协调的问题,即:制导过程因要保证弹目视线角速率收敛到0,从而导致飞行弹道平直,易被拦截;而单纯的进行弹道机动将无法兼顾制导目的,易带来较大的脱靶量. 二是传统的飞行器制导与控制回路分离设计方案的短板,即:采用分离设计需要满足频谱分离的假设,未能把两回路之间的耦合考虑进来,同时在末制导以及飞行器进行高机动动作等情境下,频谱分离的假设条件无法得到保证,导致设计无法满足指标要求. 因此,设计一种具备弹道机动能力,同时考虑制导、控制系统耦合的一体化方法具有较重要的意义.
机动、制导与控制一体化的概念[1]应突防能力的需求和一体化设计方法的优点而产生. 在此领域,对于弹道机动形式,有研究者对不同弹道机动形式的突防能力进行了研究[2],得出了螺旋机动突防效果最好的结论;而在机动与制导一体化方面,赵红超等[3]采用加权匹配方法,设计了复合制导信号,实现了末端机动与末制导段的一体化弹道;制导、控制一体化技术在被提出后,得到了研究者们的广泛研究,主要的设计方法有:最优控制、滑模变结构控制、反馈线性化等,多数结合反演控制方法进行设计[4−6].
纵观以上研究,单独研究弹道机动形式或是将弹道机动、制导、控制三者中的两者相结合的研究已日趋完善,但将弹道机动突防、精确制导、姿态稳定控制综合进行考虑的研究为之尚少. 在飞行器这类系统性很强的武器系统设计过程中,将各子系统分离设计再进行联调的方法被广泛应用,但一旦不能满足总体指标要求,往往带来多个分系统的调整与重新设计,损失性能的同时带来研制周期的拉长,因此进行机动、制导与控制的一体化设计十分必要.
本文通过建立制导与控制一体化模型,基于滑模变结构控制理论设计并证明了制导与控制一体化控制律,采用三通道分离思想,通过对俯仰和偏航通道视线角速率的周期性偏置,设计完成了螺旋机动、制导与控制一体化的控制律,仿真验证了其有效性.
1 纵向平面飞行器制导控制一体化建模
1.1 非线性弹目相对运动
考虑到本文研究的飞行器为轴对称构型,拟采用STT 控制方式(侧滑转弯),滚转角引起的耦合效应很小,从而可采用三通道分离设计,首先将问题简化到俯仰通道进行研究.
如图1,可以建立如式(1)~(3)所示的纵向平面的弹目相对运动模型[7].
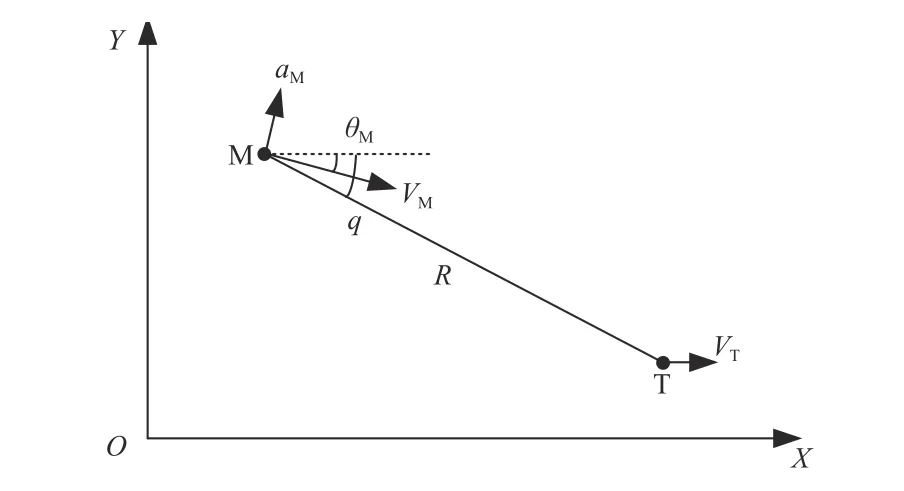
图1 纵向平面的弹目相对运动Fig. 1 Endgame kinematics in the longitudinal plane


式中:下标M 和T 分别表示飞行器和目标;VM、 θM、aM分别为飞行器的速度、弹道倾角和加速度,其中aM=Y/m−gcosθM;VT为 目标的速度,VT1,VT2为目标速度在视线方向和垂直视线方向的两个分量;q为弹目视线角;R为弹目相对距离.
本文所考虑为飞行器末制导段的问题,结合实际情况进行了如下的假设:
假设1考虑本文飞行器在末制导阶段不受推力作用,机动过载主要由弹翼升力提供,仅改变飞行器速度的方向不改变速度的大小,即V˙M=0.
假设2与飞行器的速度相比较,目标的移动速度相对较小,可以认为满足VM≫VT.
根据以上假设并结合式(1)~(3)整理得到

式中 ∆q为导引头探测的视线角及视线角速率信息误差.
1.2 弹体控制回路
纵向平面的动力学方程如下[8]
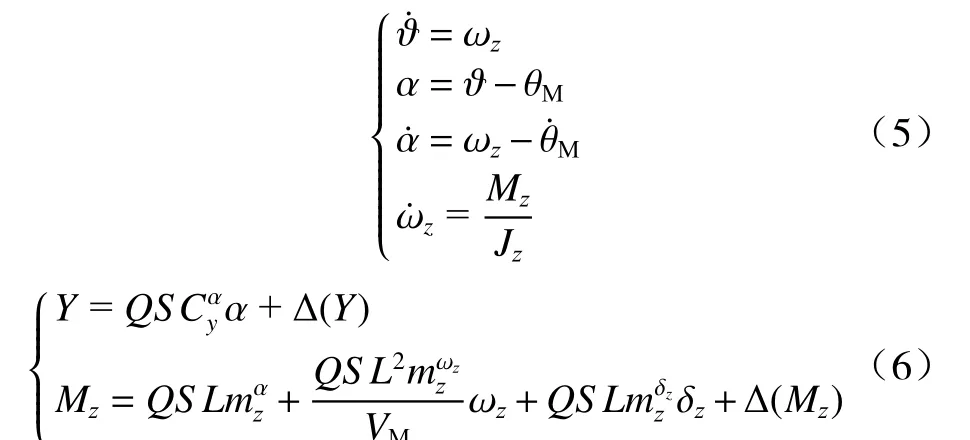
式中: α为飞行器攻角; ϑ为俯仰角; ωz为俯仰角速度;Mz为 俯仰力矩;Y为飞行器升力; ∆(Y)、∆(Mz)为由气动参数变化等带来的升力和俯仰力矩有界未知不确定项;其余符号与飞行力学中的常规定义相同.
1.3 制导控制一体化模型
结合以上式(3)~(6),将其写成状态空间方程形式,可以建立如下的纵向平面机动制导一体化模型
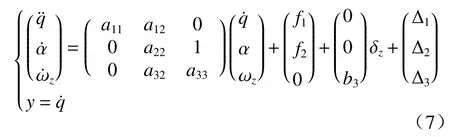
式中: δz为 一体化系统的输入为升降舵控制量;q˙为系统输出为弹目视线角;

2 制导控制一体化设计
第1 节完成了式(7)的制导与控制一体化模型建立,但这一系统为一个时变、并有非匹配不确定性的系统,首先应用非线性坐标变换的方式[9−11],将以上模型转化为等效的能控标准型,再进行后续的控制律设计.
定义如下的状态量及控制量
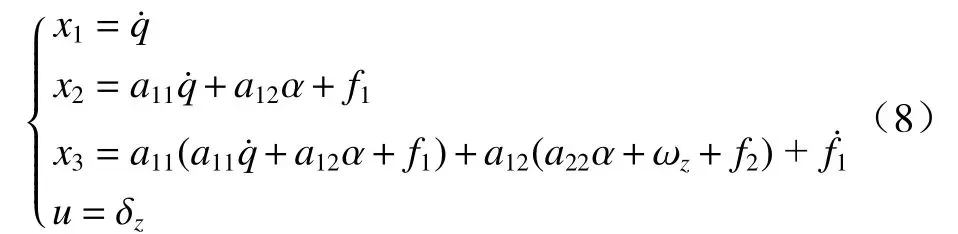
从而,用于控制器设计的一体化模型转化为

式中:
对于获得的一体化模型式(9),有较多研究应用反步控制方法,分级设置虚拟控制量和子系统输出,通过对级联子系统的依次稳定控制,完成整体的控制器设计,但实际上这种方法与常规的制导回路、控制回路分离设计的方式雷同,并没有完成真正意义上的一体化设计[12](即由导引头探测获得的弹目相对运动信息,根据所设计的控制律直接生成升降舵δz的控制量,从而实现制导目的). 本文应用滑模变结构控制的思想,在设计滑模面时,考虑包含控制涉及所有的状态变量,完成一体化的控制律设计,从而实现了由弹目相对运动信息,直接获得升降舵的控制量,以期达到减少时间延迟并提升制导控制精度的目的.
飞行器实现制导目的要使视线角速率q˙收敛到0从而保证零脱靶量,对应于上面的一体化控制模型,即保证状态量x1收敛到0,从而设计如下的零效脱靶量滑模面

式 中c1>0,c2>0 ,满 足p(ρ)=ρ2+c2ρ+c1赫 尔 维 茨多项式条件,为设计参数. 下面推导滑模自适应控制律[13].
假设3对于建立的一体化模型,扰动项为小量,可以认为其有界,有以下条件

式中Ti,N1,N2,W1为未知常数.
令M1=T1,M2=N1+T2,M3=W1+N2+T3,从而有如下的自适应非线性控制律

自适应律如下
式 中:kl>0,λ1>0,λ2>0,λ3>0 为 设 计 参 数;为Mi的估计值.
在控制舵角输入 δz=u的作用下,系统轨迹将到达滑模面并沿滑模面运动,则s=0,当系统到达沿滑模面运动时,有q˙ →0,也即纵向平面的脱靶量将趋于0.
3 证 明
在进行证明前,引用如下3 个命题.
命题2对于系统=Φz+d,其中 Φ为赫尔维茨矩阵,则
①若存在正常数k1使 得 //d//≤k1, 则存在常数k2使得 //z//≤k2;
②若d渐近收敛到0,则z渐近收敛到0.
命题3若常微分方程e1ξ+e2ξ˙+···+enξ(n−1)+ξn=η满足赫尔维茨多项式g(ρ)=e1+e2ρ+···+enρn−1+ρn且η渐近收敛至0,则 ξ(m)(m=0,1,···,n−1)也同样渐近收敛至0.
以上命题由文献[14]中经简单推导证明,在以下证明过程中直接引用.
证明

求导有

由此可得

因此可知s˙有 界,于是有界,即 ds2/dt有界. 由E≤−ks2≤0可得

式(9)可以重写为


结合假设3 及上述的结论, //H//有界,即存在一个有限正数,满足 //H//≤,由kl>0,p(ρ)=ρ2+c2ρ+c1赫 尔维茨多项式条件,可知Ac为赫尔维茨矩阵. 根据命题2,以上系统的所有状态均有界. 综上,系统稳定且输出渐近趋于0. 证毕.
4 机动、制导、控制一体化控制律设计
第2、3 节设计并证明了制导与控制一体化的控制律,在此基础上,为了使飞行器在末制导攻击过程中具备更好的突防性能,设计增加其机动性. 飞行器实现制导要通过将视线角速率q˙ →0来实现,但也因此其机动性相应降低. 在制导过程中,在弹目相对距离较远时,人为设定程控将飞行器的视线角速率q˙进行拉偏,使其按正弦规律周期性变化,由于正弦曲线以0 为中心线变化,因此飞行器的机动弹道会以制导目标的理想弹道(q˙=0)为中心线周期性变化[15],形成弹道机动能力;在弹目相对距离(本文取R为3 km)较近时,再取消对于视线角速率的机动拉偏,这样,在保证制导能力与精度的同时,提升了飞行器的机动性. 对第2 节所设计的滑模面进行如下的改进

式中: ∆sz=Qsin(ωt)为俯仰通道的螺旋机动视线角速率偏置项, ω为机动频率,Q为机动幅度

从而推导升降舵舵角控制量为

以上完成了纵向平面的一体化设计,航向平面的控制律可采用类似的推导形式.
三维螺旋机动形式的生成,可以由俯仰通道和偏航通道采用相同频率、不同相位的机动过载生成实现,对应本文的设计思想,即对视线倾角速率与视线偏角速率分别按正弦曲线和余弦曲线进行拉偏,上文给出俯仰通道的机动参数设计,偏航通道的机动参数如下

滚转通道设计采用双回路自驾仪实现对滚转角的抑制,双回路的内回路采用角速率反馈以提高系统阻尼特性,外回路采用滚转角反馈. 控制结构图 如图2.
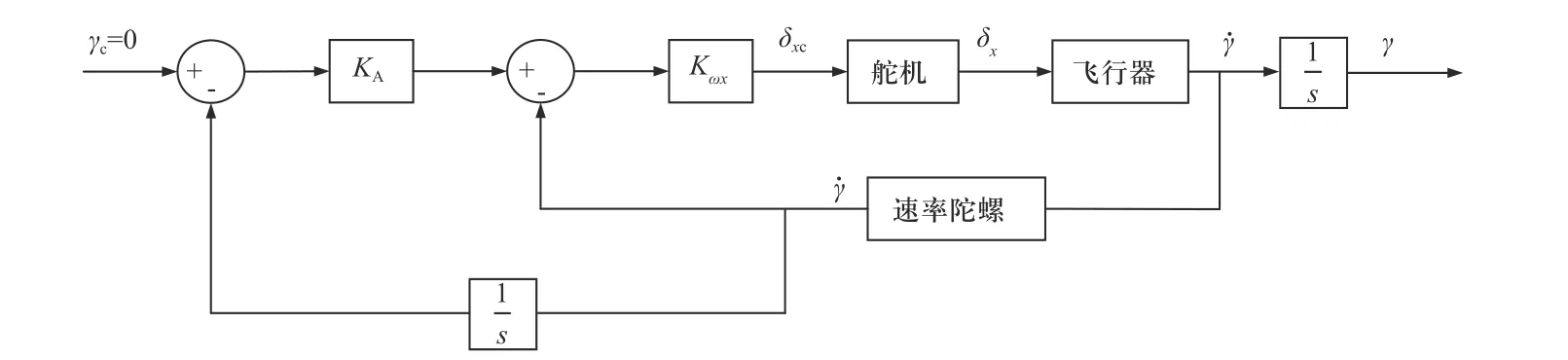
图2 滚转通道姿态自驾仪方案Fig. 2 Scheme of attitude autopilot for rolling channel
5 仿真验证及分析
为验证本文所设计的制导与控制一体化控制律及螺旋机动、制导与控制一体化控制律,采用数值仿真的方式进行了验证.
文中所用的飞行器结构参数和气动参数借鉴于文献[16],其余的主要仿真参数为:飞行器速度VM=204 m/s,初始位置 (XM0,YM0,ZM0)=(0,9 000,0) m,初始弹道倾角 θM0=0◦,初始弹道偏角 ψM0=0◦,静止目标的位置 (XT0,YT0,ZT0)=(8 000, 0, 2 000) m,俯仰、偏航 通 道 机 动 偏 置 项 ∆sz=Qsin(ωt)=0.01sin(0.4t)(°)/s,∆sy=Qcos(ωt)=0.01cos(0.4t)(°)/s, 舵 角 操 纵 量 限制±20°.
仿真结果如图3~图11 所示.
由图3 的飞行器三维弹道及图4 弹目相对距离收敛到0 可见,机动与非机动的制导与控制一体化设计均实现了对目标的精确俯冲攻击任务;不过由于飞行器主动进行螺旋机动,导致机动弹道攻击目标的命中时间(62.8 s)稍长于非机动所需时间(60.5 s).
图3 飞行器攻击静止目标的三维弹道Fig. 3 3-D trajectory of attacking a stationary target
图4 弹目相对距离图Fig. 4 Relative distance between aircraft and target
由图5,在视线坐标系下,非机动弹道剖面呈简单的曲线形式,螺旋弹道呈半径衰减的圆形曲线,在弹目距离接近3 km 左右,这种圆形曲线改变,转为非机动形式.
图5 初始视线系下的弹道剖面Fig. 5 Ballistic profile under line of sight
图6,图7 分别显示了螺旋机动与非机动情况下的视线倾角速率和视线偏角速率,在螺旋机动情况下,两个角速率呈正弦形式周期变化,保持在0 附近的小范围内,在接近目标时收敛到0;而非机动情况下,两个角速率均快速收敛至0 并保持,也印证了设计的控制律的有效性.
图6 视线倾角速率Fig. 6 Rate of line of sight along pitch

图7 视线偏角速率Fig. 7 Rate of line of sight along yaw
图8,图9 为控制律给出的舵角控制量,可见其均在设定的舵角限制范围内,可以实现. 图10,图11给出了飞行过程中的攻角与侧滑角变化,也在飞行器可承受范围之内.

图8 升降舵控制量Fig. 8 Elevator control amount

图9 方向舵控制量Fig. 9 Rudder control amount
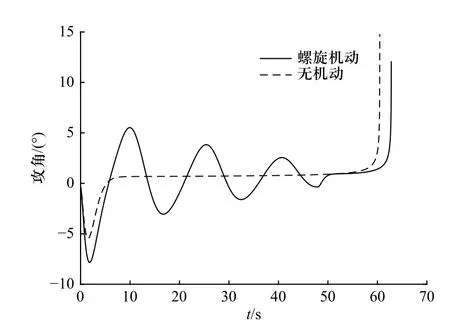
图10 攻角Fig. 10 Angle of attack
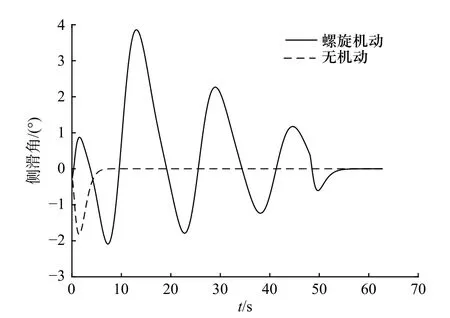
图11 侧滑角Fig. 11 Sideslip angle
6 结 论
本文由空舰飞行器俯冲攻击慢速目标存在增加突防能力的需求出发,将飞行器的弹道机动、制导与控制结合,建立了飞行器末制导的制导、控制一体化模型,应用滑模变结构控制理论,设计了制导、控制一体化的控制律,并通过引入周期性的视线角速率偏置项,实现了飞行器的螺旋机动、制导、控制一体化设计,随后由数值仿真完成了设计内容的验证,结果表明所设计的机动、制导、控制一体化的控制律保证了对目标的精确打击的同时兼备弹道螺旋机动能力.
